儲罐液位的紅外定量辨識
2021-03-09 09:19:18宋春霞
激光與紅外 2021年2期
宋春霞,陳 林,羅 兵
(海軍士官學校兵器系,安徽 蚌埠 233000)
1 引 言
在石油化工、能源以及軍工等生產領域,準確測量儲罐內原液的液位,及時反映儲罐內原液與氣、水等其他雜質的界面狀態,對降低原液損耗、減少生產儲存成本、提高自動化管理水平以及原液安全的生產儲存等具有非常重要的作用,比如儲罐內液位的準確識別有利于最大限度地利用儲罐的存儲空間,同時又能防止因儲液泄露而導致的事故[1-2]。目前,液位檢測主要有人工檢尺等方法[3]。例如,文獻[4]采用人工檢尺的方法實現了對原油儲罐內油水液位高度的檢測;文獻[5]通過壓差法實現了對濃硫酸電解液液位的檢測;文獻[6]結合BP神經網絡技術,采用變介質電容法實現對瓶裝液位的檢測;文獻[7]采用機器視覺檢測方法,利用圖像處理技術對CCD攝像儀攝取的圖像進行處理,實現了對液位的檢測。相比于上述檢測技術,紅外檢測因其維護簡單、直觀、非接觸等優點,在液位檢測中的研究正變得日益廣泛。文獻[8]將采用紅外檢測技術實現了對汽車油箱燃油液位的檢測;文獻[9]采用紅外檢測技術實現了對天然氣管道內液體液位的檢測;文獻[10]、[11]通過對石油儲罐的紅外熱像圖的一系列處理實現了對原油液位的檢測;文獻[12]利用紅外CCD攝像頭攝取摻釓液體,通過對采集到的圖像進行預處理、分割等方法實現了對摻釓液體液位的檢測。文獻[8]~[12]主要是通過對紅外圖像進行平滑降噪等處理后,利用圖像邊緣檢測分析算法來獲取液位高度,文獻[8]~[12]采用的紅外圖像分析處理方法要想得到好的檢測效果,需要根據紅外圖像的噪聲類型采用相應的降噪方法,這就需要對待檢測裝置紅外圖像的噪聲類型有清晰的分析和認識,并且紅外圖像邊緣檢測算法在進行邊緣檢測時存在可能因閾值選擇的不合適而導致液位信息丟失的風險,因此,文獻[8]~[12]提出的紅外圖像分析處理方法檢測精度相對不高,并且針對不同的檢測情況需要采用不同的分析處理算法,應用對象有限。為了避免紅外圖像分析處理方法的不足,本文將共軛梯度算法與紅外檢測技術相結合來實現對液位的識別。
2 正問題模型
本文的研究問題為軸對稱圓柱坐標系下的儲罐液位定量檢測,如圖1所示,儲罐為軸對稱圓柱,儲罐的下部為存儲的液體,高度為Ll,上部為氣體,儲罐的高度為Ly,內、外半徑分別為r1、r2,忽略儲罐上下表面與外界的換熱,則可建立軸對稱圓柱坐標系下的穩態導熱方程:
(1)
邊界條件:
(2)
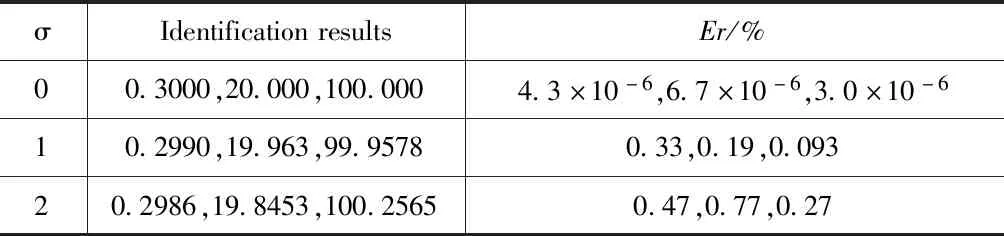
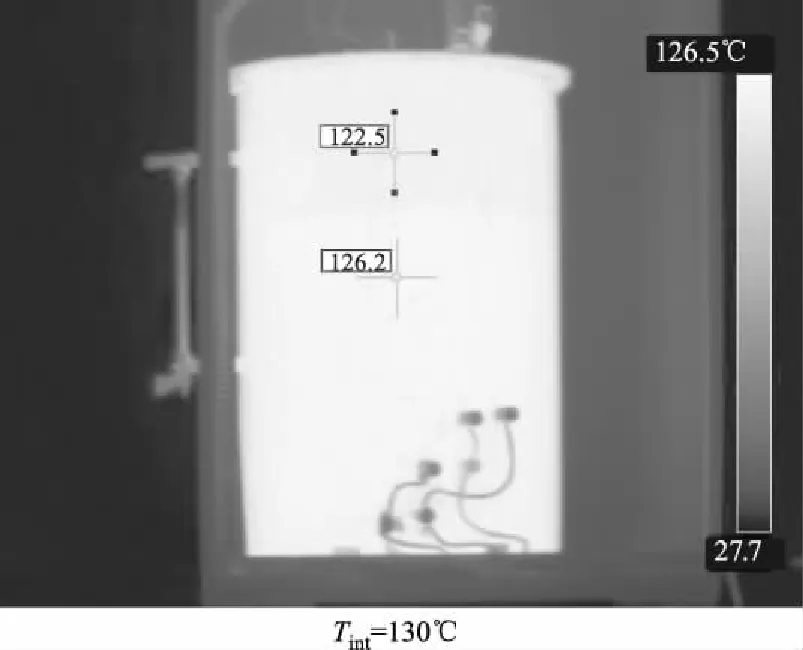
其中:λ為儲罐的導熱系數(W·m-1· ℃-1);T為儲罐內各離散點的溫度(℃);Tint為內部流體溫度(℃);Tf為環境溫度(℃);αint為儲罐內表面與內部流體的換熱系數(當y≥Ll,αint為儲罐內表面和上部氣體的對流換熱系數αg;當y 在進行正問題求解時,公式(1)、(2)中的所有參數都為已知,正問題求解是為了得到給儲罐外表面的溫度分布信息,從而為反問題求解提供依據。 圖1 正問題模型 與其他迭代算法相比,共軛梯度法具有計算效率高,識別精度受測溫誤差的影響較小的優點,因此,本文選擇共軛梯度算法來反演識別儲罐液位。 共軛梯度算法通過使目標函數S(P)達到極小化來確定識別結果,即S(P)<ε(ε為給定的極小正數)。 S(P)=[Y-T(P)]T·[Y-T(P)] (3) 其中,P=(p1,p2,p3,…,pn)是待識別的參數向量,由于儲罐內上層氣體是儲液揮發氣和大氣的混合物,其與儲罐內表面的換熱系數比較復雜,并且儲罐內部溫度的測量較困難,因此對于本文儲罐液位的識別問題,待識別的參數不僅包括液位的高度Ll、還包括儲罐內表面與上部氣體的換熱系數αg以及儲罐內部溫度Tint,即P=(Ll,αg,Tint);m為y方向上的離散網格數;Yi為實際測量得到的儲罐外表的溫度值;Ti為在參數向量P下通過公式(1)~(2)計算得到儲罐外表面的溫度值。 共軛梯度反演識別算法[13-14]的迭代公式為: Pk+1=Pk-βkdk (4) 式中,dk、βk的計算公式為: (5) (6) (7) γk= (8) (9) 對于本文儲罐液位的識別問題,其識別過程可描述為:通過共軛梯度算法不斷修正液位高度Ll、換熱系數αg以及溫度Tint的初始假設值,以期找到一組Ll、αg、Tint值,使得在此組Ll、αg、Tint值下通過公式(1)、(2)計算得到的儲罐外表面溫度分布與實測的儲罐外表面溫度分布相吻合,求解流程如圖2所示。 在進行儲罐液位定量識別的數字驗證過程中,首先假定一組液位高度Ll、換熱系數αg和內部溫度Tint的真實值,通過方程(1)~(2)計算得到儲罐外表面的真實溫度值,依據公式(10)提出的測溫誤差模擬方法,將測溫誤差添加到由方程(1)~(2)計算得到的真實溫度值上,以此作為實際檢測時儲罐外表面的溫度值,然后再假設一組液位高度Ll、換熱系數αg和溫度Tint的初始值,利用共軛梯度法迭代求解出最終的液位高度Ll、換熱系數αg和溫度Tint。 Y=Ytrue+ωσ (10) 圖2 CGM反演識別算法流程圖 其中,Y為實測溫度;Ytrue為真實溫度;ω為隨機數(-1.0~1.0),σ為偏差程度。 在進行迭代求解前,首先給出正問題模型中的各個參數值:Ly=0.6 m,r1、r2分別為0.3 m、0.303 m,λ=15.2 W/(m· ℃),αout=10 W/(m2· ℃);αl=100 W/(m2· ℃),Tf=20 ℃;待識別參數液位高度Ll、換熱系數αg和內部溫度Tint的真實值分別為0.3 m、20 W/(m2· ℃)、100 ℃。 為了評價識別的準確性,定義識別的相對誤差: (11) 其中,Er為相對誤差;Pe為識別結果;P為真實值。 表1為不考慮測溫誤差時在不同初始假設下液位高度Ll、換熱系數αg和內部溫度Tint的識別結果。由表1 可以看出,不存測溫誤差時,在不同的初始假設下液位高度Ll、換熱系數αg和內部溫度Tint都能夠精確地識別,表明識別方法能夠準確地識別出液位高度Ll、換熱系數αg和內部溫度Tint。 表1 不同初始假設下的缺陷深度識別結果 表2為不同測溫誤差下的液位高度Ll、換熱系數αg和內部溫度Tint的識別結果,液位高度Ll、換熱系數αg和內部溫度Tint的初始假設分別為0.2 m、10 W/(m2· ℃)、75 ℃。由表2可以看出,當存在測溫誤差時,液位高度Ll、換熱系數αg和內部溫度Tint的識別精度將降低,但在較大的測溫誤差下仍有較高的識別精度。 表2 誤差對識別結果的影響 在實際檢測時,可能會存在迭代求解選定的儲液和儲罐內表面的換熱系數αl與真實值存在偏差,表3為在相同的測溫誤差下(σ=2),當迭代求解選定的換熱系數αl=100 W/(m2· ℃)時,在不同的真實值下的識別結果(液位高度Ll、換熱系數αg和內部溫度Tint的初始假設分別為0.2m、10 W/(m2· ℃)、75 ℃)。由表3可以看出,當迭代求解選定的換熱系數αl值與真實值存在偏差時,識別結果精度將降低,但是在較大差別下,液位高度Ll仍有很好的識別精度,表明了識別方法有較好的適應性;同時可以看出,當迭代求解選定的換熱系數αl值比真實值偏大時,內部溫度Tint的識別結果將相對于真實值偏小,換熱系數αg將相對于真實值偏大;而當迭代求解選定的換熱系數αl值比真實值偏小時,內部溫度Tint的識別結果將相對于真實值偏大,換熱系數αg則相對于真實值將偏小。 選擇為未注滿自來水的壓力容器為實驗對象,其下部安裝有控制水溫的加熱電阻,在壓力容器內水的溫度保持穩定后,通過紅外熱像儀攝取壓力容器得到壓力容器表面的溫度,并通過紅外分析軟件提取壓力容器表面的溫度,壓力容器內的水溫在80 ℃,100 ℃和130 ℃時的紅外圖像如圖3所示。 表3 不同換熱系數下的識別結果 圖3 不同水溫下的紅外圖像 壓力容器為不銹鋼材料,壓力容器的高度為高度0.7 m,即Ly=0.7 m,內外半徑分別為0.3 m、0.303 m,即r1=0.3 m、r2=0.303 m,實驗時環境溫度為27 ℃,即Tf=27 ℃,壓力容器內的水位高度為0.475 m,即Ll=0.475 m。 將參數帶入后,不同水溫下的識別結果如表6所示。(由于實驗中未對αg進行測量,這里只給出液位高度Ll內部溫度Tint的相對誤差)。從表4可以看出,實驗算例的識別結果精度雖然沒有數字算例的精度高,但是液位高度Ll的最大識別誤差在1.2 %左右,進一步驗證了識別方法能夠有效識別儲罐液位高度。 表4 不同實驗下的識別結果 本文將共軛梯度反演識別算法和紅外檢測技術相結合實現了儲罐液位的定量識別。首先利用有限體積法實現了對儲罐液位檢測模型的數字計算,得到儲罐外表面的溫度分布,然后依據儲罐外表的溫度實現了對液位高度Ll、換熱系數αg和內部溫度Tint的定量識別,得到的結論主要有: (1)當不存在測溫誤差時,液位高度Ll、換熱系數αg和內部溫度Tint都能準確的識別,但當誤差增大時,液位高度Ll、換熱系數αg和內部溫度Tint的識別結果精度將降低,因此,在實際檢測中應當盡量減小測溫誤差,以提高識別結果的精度。 (2)當迭代求解選定的換熱系數αl值與真實值存在偏差時,識別結果精度將降低,但是在較大差別下,液位高度Ll仍有很好的識別精度,表明了識別方法有較好的適應性。 (3)識別方法也能準確定識別出儲罐內上層氣體與其內表面的換熱系數αg以及內部溫度Tint,但當迭代求解選定的換熱系數αl值與真實值偏差較大時,換熱系數αg的識別結果誤差較大。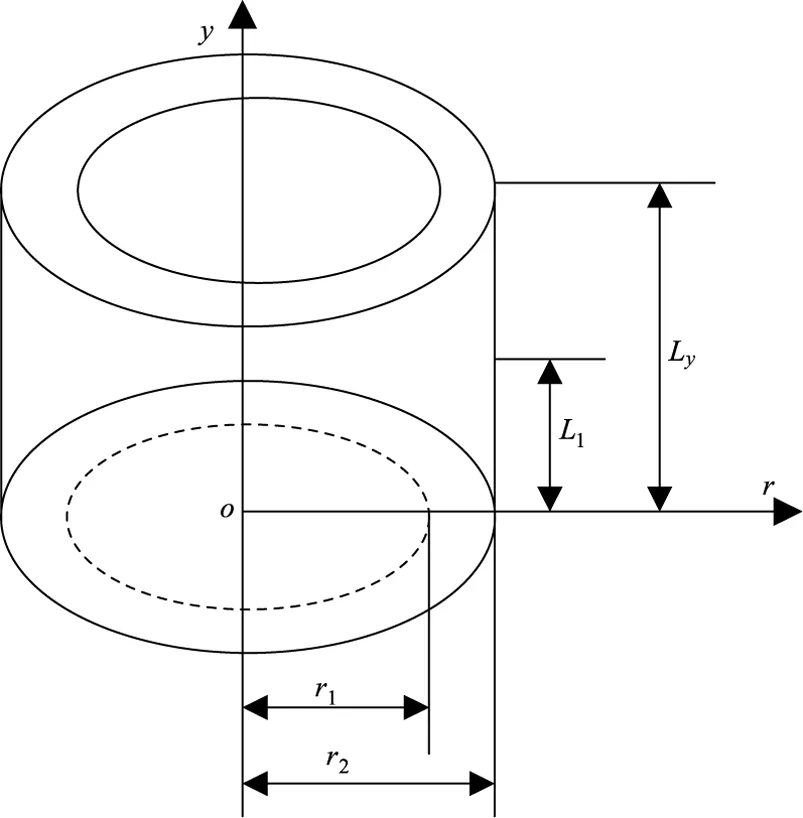
3 反演識別求解過程
3.1 共軛梯度算法
3.2 共軛梯度算法的迭代原理

3.3 迭代求解過程
4 定量識別算例及其分析
4.1 數字驗證及其分析


4.2 實驗驗證及其分析




5 結 論
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
電子測試(2017年11期)2017-12-15 08:57:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維護與修理(2015年2期)2015-02-28 12:15:41
