大型光學望遠鏡子鏡單元微位移促動器綜述
2021-03-09 09:19:14劉炎森張景旭安其昌
激光與紅外 2021年2期
關鍵詞:結構
劉炎森,張景旭,楊 飛,安其昌
(1.中國科學院長春光學精密機械與物理研究所,吉林 長春 130033;2.中國科學院大學,北京 100049)
1 引 言
大型光學望遠鏡有單塊主鏡和拼接主鏡兩種形式,單塊主鏡受加工精度、制造成本、鏡面變形以及運輸安裝等因素影響,口徑在達到一定程度后便無法再繼續增大。目前最大單塊主鏡望遠鏡口徑達到8 m級。拼接鏡面主鏡是由小塊的子鏡按順序排列而成,通過子鏡主動支撐技術完成各自位置的調整。因其制造和應用等方面的可行性,使其能夠支持望遠鏡向更大口徑發展。目前涉及到該技術的大型望遠鏡包括已經建成的10m級望遠鏡W.M.Keck telescope(Keck),KeckⅡ,Hobby-Eberly Telescope(HET),Southern African Large Telescope(SALT),Gran Telescopio Canarias(GTC)[1-8]和我國的4 m級望遠鏡Large sky Area Multi-Object Spectroscopic Telescope(LAMOST)[9],正在建設當中的包括25 m級望遠鏡Giant Magellan Telescope(GMT)、30 m級望遠鏡Thirty Meter Telescope(TMT)和European Extremely Large Telescope(E-ELT),以及6 m級太空望遠鏡James Webb Space Telescope(JWST)[10-13]。
微位移促動器是拼接鏡面望遠鏡子鏡支撐系統的關鍵部件,起到支撐和調節子鏡位姿的作用。促動器通過高精度的伸長或縮短,控制每塊子鏡按照設計要求排列在指定位置,從而實現各子鏡的共焦和共相。拼接鏡面光學紅外望遠鏡的促動器均需達到納米級分辨率和毫米級的行程。隨著望遠鏡口徑的不斷增大,其所受重力和風載等影響導致的結構的變形量更大,所需促動器的行程因此變得更高。而大行程和高精度在實際應用中很難同時實現,已建10米級望遠鏡中應用的促動器無法直接應用于未來30米級或更大口徑的望遠鏡中[14]。國外已經嘗試采用粗精結合的方式,即將促動器的功能分成卸載系統和精調兩部分,來提高促動器的行程。并且針對促動器的抗擾性能,分別提出采用柔性促動器和對剛性促動器增加主動阻尼兩種方案[15-16]。但隨著新問題的出現,各種促動器結構還需要進一步優化。國內也曾對應用于拼接鏡面望遠鏡的微位移促動器及其控制系統進行設計和測試[17-19],均獲得不錯的測試結果,但相比更大口徑望遠鏡促動器的使用要求,還需要開展更深入的研究。本文旨在通過分析各種促動器的結構形式,結合促動器的發展要求,總結位移促動器的發展趨勢,為未來大口徑望遠鏡促動器的設計提供參考。
本文首先闡述微位移促動器的功能和原理,然后介紹各種微位移促動器的結構,接下來將其分類和匯總,并對比各種結構形式的優劣,最后針對大型光學紅外望遠鏡的發展需要,對促動器的發展趨勢做出總結。
2 微位移促動器發展現狀
2.1 微位移促動器的性能要求
微位移促動器的主要作用是調節子鏡位姿。子鏡沿鏡面法向的旋轉以及在鏡面所在平面內的移動由被動支撐結構約束,移動量很小且不會對望遠鏡成像質量產生明顯影響。而子鏡沿鏡面法向的移動(離焦)和相對鏡面的偏轉則會嚴重破壞望遠鏡成像質量。為了控制子鏡的離焦和偏轉,通常在每塊子鏡背面布置三個促動器,通過子鏡邊緣的位置傳感器檢測子鏡間位置誤差,并將誤差信號反饋給促動器,對誤差進行補償,從而保持各子鏡間相對位置的精確。
根據望遠鏡的成像要求,可推算出各子鏡間相對位置的最大誤差要求,也即微位移促動器的運動精度要求。望遠鏡在不同的俯仰角工作或在跟蹤觀測目標時會由于重力而使結構產生變形,促動器需要具有一定的行程以補償望遠鏡產生的變形。同時促動器的負載能力應該大于鏡面對促動器的壓力。此外促動器還應具有快速的反應能力以及一定的壽命和可靠性[20]。
由于各望遠鏡的觀測對象和成像要求不同,導致對促動器的分辨率要求不同。例如HET,SALT和LAMOST的使用要求均為光譜觀測[21-23],只需要滿足光線的共焦要求,促動器達到幾十納米的分辨率即可。而其他需要對觀測目標成清晰影像的光學望遠鏡,則要求同時滿足光線的共焦和共相,促動器應具有幾納米的分辨率。同時受望遠鏡結構和觀測環境等影響,使促動器的使用條件不同。如各拼接鏡面望遠鏡的子鏡大小不同,所需促動器的負載能力就不同。故不同的望遠鏡都對其使用的微位移促動器提出各自的性能要求。
2.2 已建成望遠鏡中應用的促動器
2.2.1 Keck和KeckⅡ促動器
Keck促動器主要由伺服電機、滾柱絲杠和液壓裝置組成,如圖1所示。旋轉編碼器監測伺服電機的旋轉角度,其分辨率決定了促動器的最小步長。滾柱絲杠和輸出軸采用了兩種不同的導向裝置,滾柱絲杠的運動范圍較大,通過滑動導軌支撐,而輸出軸的行程很小,用撓性膜片支撐,既簡單又實用。經測試,促動器的平均分辨率大約為4.15 nm左右,平均定位精度為7 nm[24]。KeckⅡ望遠鏡的設計與Keck望遠鏡相同,僅在軟件和電腦硬件系統等方面做出改進[8]。

圖1 Keck促動器內部結構[24]
2.2.2 HET和SALT促動器
HET在觀測時主鏡保持55°仰角恒定,只做方位運動,使望遠鏡子鏡支撐系統受力方向和大小保持恒定。子鏡位姿由電機驅動的商用線性促動器搭載撓性杠桿控制。由桁架提供支點,利用杠桿將子鏡和促動器相連,如圖2所示。杠桿提供11.9∶1的縮放,以提高商用促動器的精度和負載能力。商用促動器由TS Products(Post Falls,Idaho)提供,為2200型直線驅動設備。該促動器具有25 mm的行程和218 nm的分辨率。整個系統最終可獲得1.83 mm的行程和18 nm的分辨率[25]。

圖2 HET子鏡支撐結構[25]
SALT為與HET對應放置在南半球的望遠鏡,其設計以HET為基礎,并根據觀測需求、科技進步和HET的應用經驗等方面做出改進[21]。SALT促動器同樣以商用促動器為基礎,搭配縮放比為12∶1的杠桿提高運動精度。其促動器由Physic Instrumente公司提供,具有20 mm行程和360 nm的分辨率[26]。
2.2.3 GTC促動器
GTC促動器原理與Keck促動器相似,同樣由電機、滾柱絲杠和液壓裝置組成。通過帶有編碼器的電機驅動滾柱絲杠,將旋轉運動轉變為軸向運動,再以液壓裝置對軸向位移進行縮放,保證輸出端的運動精度和負載能力。該促動器精度為1.19 nm,行程可達到1.6 mm左右[27]。
2.2.4 LAMOST促動器
LAMOST反射改正板MA選擇使用商用促動器搭配柔性杠桿。促動器選用美國Diamond Motion(原TS Products)公司的TS 2200型直線設備,行程25 mm,分辨率50 nm。杠桿縮放比為10∶1,并設計成柔性結構,如圖3所示。杠桿通過一副垂直布置的高強度不銹鋼片作為支點,即杠桿扭轉部分,能夠實現無空回和無摩擦。杠桿橫梁末端布置兩副平行的鋼片,分別對促動器進行側向解耦和軸向解耦,以保護促動器免受過度側向力[28]。

圖3 LAMOST柔性杠桿[28]
2.3 未來30 m級望遠鏡促動器設計方案
2.3.1 TMT促動器初期結構
TMT促動器設計成一種柔性結構,由重力卸載機構和音圈電機組成。重力卸載機構旨在平衡鏡面重力,即提供支持力,并為促動器提供行程。音圈電機對輸出軸施加額外推力,進行精密調節。如圖4所示。電機轉動線軸,繞過定滑輪為彈簧施加拉力,然后通過杠桿推動輸出軸。杠桿支點采用商用的C-Flex撓性軸承,可提供足夠的軸向和徑向剛度,并減小摩擦和空回。音圈電機為中空結構。輸出軸纏有線圈,從電機磁體中穿過。該結構步長不能確定,需要在輸出軸安裝位置傳感器檢測促動器的運動量[14]。
2.3.2 E-ELT促動器初期結構
E-ELT初期設計的促動器同樣采用柔性結構。如圖5所示。重力卸載機構提供 μm級的移動精度,音圈電機提供nm級的精度,兩段結合以實現大行程和高精度。促動器以無刷電機驅動,由行星齒輪減速,通過精密絲杠結構推動平板彈簧外側,兩片平板彈簧成對使用,輸出軸連接在板簧內側。音圈電機磁體和線圈分別安裝在輸出軸和卸載機構上,協助彈簧為輸出軸施加推力。試驗證明其鏡面定位誤差的平均值小于3 nm[29]。

圖4 TMT初期促動器[14]

圖5 E-ELT促動器內部結構[29]
2.4 其他促動器結構
其他一些被討論、設計以及試驗過的微位移促動器對該技術的發展同樣具有參考價值。包括部分拼接鏡面望遠鏡促動器的前期設計,如Keck望遠鏡早期未采用液壓裝置的精密滾柱絲杠促動器設計[20,30]、LAMOST帶有平衡重作為重力卸載結構的促動器設計[31-32]、CELT帶有主動卸載和被動卸載裝置結合的柔性促動器設計[33]。CELT(即TMT前身)曾對促動器技術做了系統的調查,總結了促動器的性能要求,提出和對比各種促動器可行方案,并介紹了促動器相關技術[34]。大型地基拼接望遠鏡GMT,采用稀疏口徑布局設計,并非傳統意義上的拼接鏡,其單塊子鏡直徑已達8.4 m,使其子鏡質量和所受風載以及重力的影響均和上述拼接鏡面望遠鏡有很大差別。不同于其他拼接鏡面主動支撐系統,其主動支撐結構采用硬點定位技術[35]。空間光學望遠鏡JWST,因其工作環境不受重力影響,因此其子鏡支撐系統以及對促動器的性能要求均不同于地面望遠鏡,其促動器形式同樣有所不同[36-37]。
2.5 微位移促動器最新進展
TMT曾對剛性促動器和柔性促動器進行了對比測試,柔性促動器在抑制震動方面表現更好,進而開展了深入的研究。促動器結構經過不斷優化,改用精密絲杠和杠桿作為卸載機構,音圈電機也通過杠桿和輸出軸相連,以減小音圈電機的負載,如圖6所示。該促動器可實現大于5 mm的行程和小于5 nm的分辨率[10,15]。E-ELT在主鏡裝配測試中采用三個基于壓電陶瓷的剛性促動器。并嘗試在剛性促動器上應用正位置反饋對系統震動做主動抑制,經過測試證明,該方法能夠在極低的成本下實現優異的性能[16]。E-ELT也曾對柔性促動器中粗精結合的動作方式進行了動力學分析,并設計相應的控制系統,最終使促動器的定位誤差保持在1.4 nm[38]。目前E-ELT已經對子鏡總體支撐系統做出了進一步的改進和測試[39-40]。
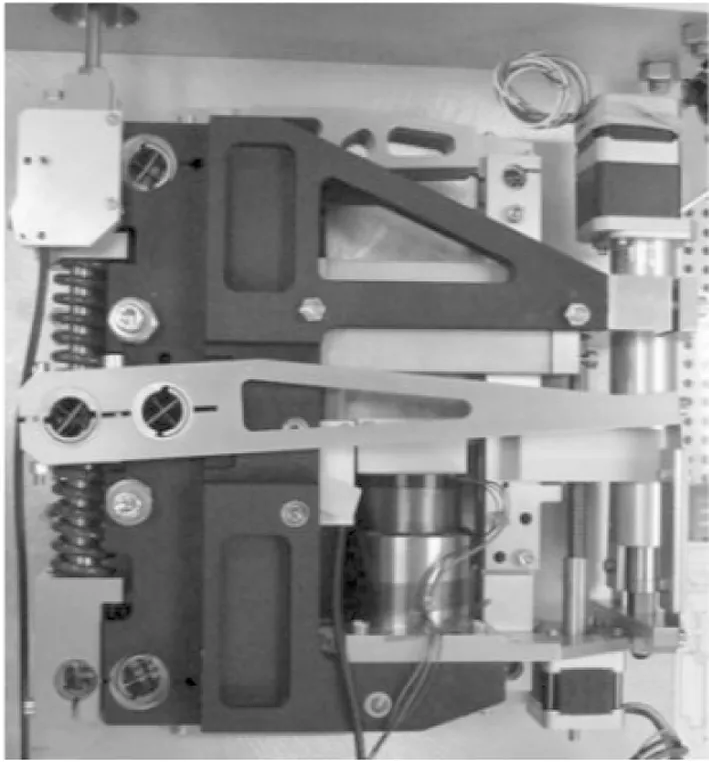
圖6 TMT促動器[10]
印度為了提高在大型光學紅外望遠鏡方面的技術水平,開展了1.5 m口徑拼接望遠鏡Prototype Segmented Mirror Telescope(PSMT)的測試。PSMT采用了柔性促動器結構,如圖7所示。該望遠鏡的口徑較小,其子鏡直徑僅有60 cm,對促動器的行程要求僅為±1.5 mm。其設計的碟形導向機構可有效防止輸出軸徑向偏移,且成本低,占用空間小。通過對控制系統的優化,PSMT促動器在測試中的穩態誤差和追蹤誤差僅為5.73 nm和10.15 nm[41-43]。

圖7 PSMT促動器模型及剖視圖[42]
國內在大型拼接鏡面望遠鏡促動器技術上也做了相關探索。例如結合LAMOST項目,設計了一種精密絲杠形式促動器,其分辨率到達(201±48)nm[17]。針對大型拼接鏡面望遠鏡,研制了基于巨磁致伸縮材料的促動器,如圖8所示。
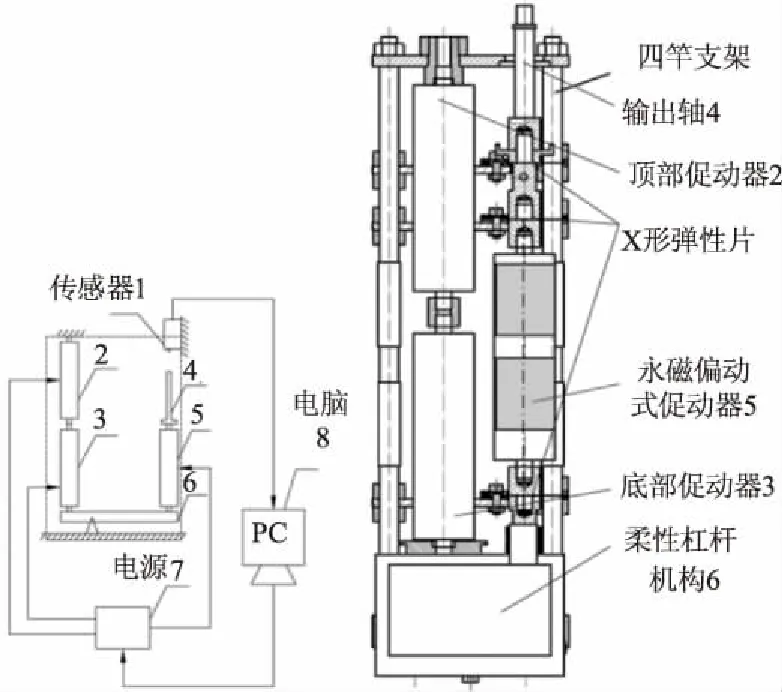
圖8 子鏡主動支撐系統及促動器簡圖[18]
經測試分析,其有能力在600N的負載下實現2 mm的行程并達到6 nm的分辨率[18,44]。在促動器的控制方面,設計了一種基于音圈電機促動器的自抗擾控制器,可有效改善系統的追蹤誤差和抗擾性能[19]。對于子鏡位姿的偏轉,針對壓電陶瓷促動器開展了子鏡控制系統的研究[45]。國內在其他用途望遠鏡促動器技術上的研究也可作為此領域的參考。例如針對110 m口徑的新疆奇臺射電望遠鏡設計的高精度位移促動器[46-47],基于南極低溫環境下射電望遠鏡研究的微位移促動器[48],以及應用于環形太陽望遠鏡的微位移促動器和應用于空間光學望遠鏡的音圈力促動器[49-50]。
2.6 微位移促動器參數對比
綜合考慮已建和在建大型地基光學紅外拼接鏡面望遠鏡的基本情況,對其采用的促動器的兩個主要參數,即精度和行程進行對比,如表1所示。表中促動器參數為設計值。
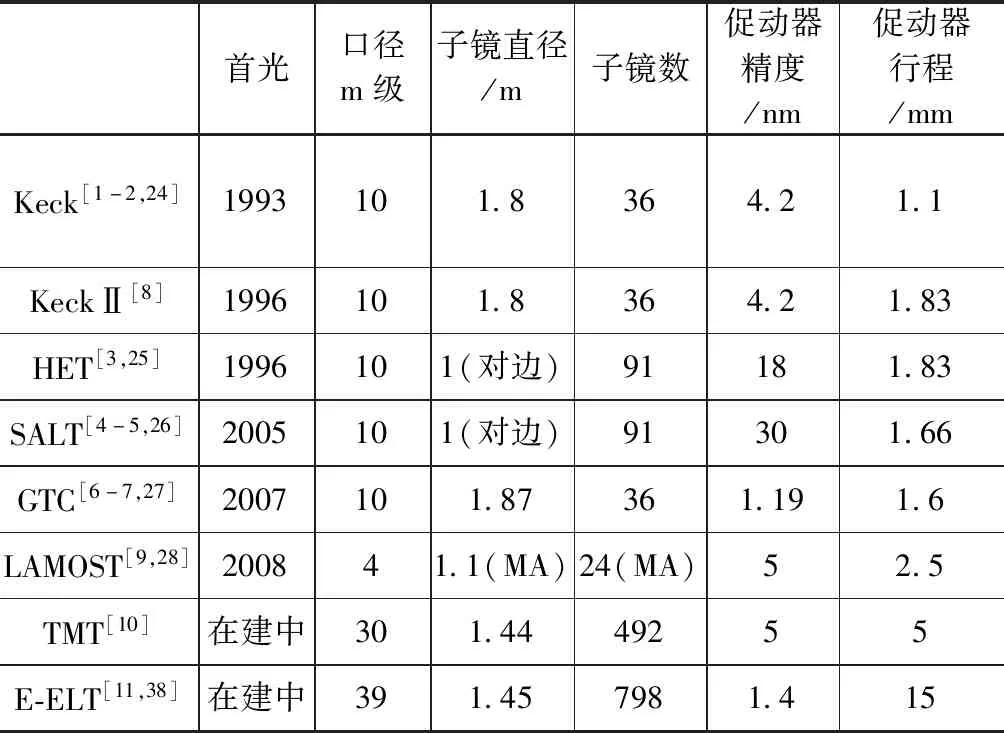
表1 促動器主要參數對比
3 微位移促動器分析
3.1 位移促動器結構分類
為便于理解促動器的工作原理和動作方式,按照力或力矩的傳遞過程,將微位移促動器分解成不同機構,并對相似結構進行歸類,總結出4種類型,分別為采用液壓縮放裝置的液壓促動器、電機驅動的商用線性促動器搭載杠桿、基于粗精結合方式的音圈電機促動器和應用磁致伸縮原理的巨磁致伸縮促動器。如表2所示。

表2 微位移促動器分類
液壓促動器由電機、精密絲杠和液壓缸三部分組成,如圖9所示。由驅動電機產生扭矩,通過精密絲杠將扭矩轉換為軸向推力,經過液壓缸將推力放大后傳遞到輸出軸。液壓裝置運動平順,且能夠提供較大的縮放比,可以使絲杠在較小負載下工作。但在促動器需要較大行程時,絲杠必須提供足夠的位移量,這將造成系統累積誤差增大。如Keck促動器的液壓裝置縮放比為24∶1,若將其行程由1.1 mm增大至5 mm,需要精密絲杠的位移量達到120 mm左右。
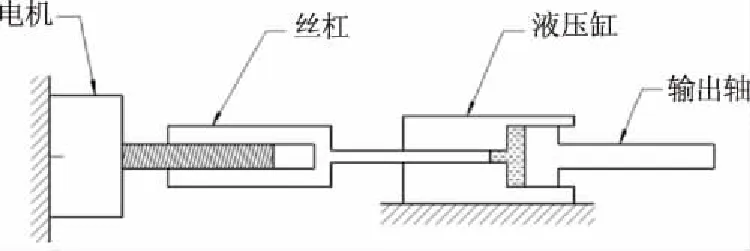
圖9 液壓促動器
商用促動器不是針對拼接鏡面子鏡主動支撐系統設計的,在精度和負載方面,商用促動器都不能達到拼接鏡的使用需求。利用杠桿放大精度和負載,在一定程度上解決了問題,如圖10所示。但經過杠桿縮放,導致總體的行程較小,很難滿足未來望遠鏡的大行程要求,因此限制了商用促動器的應用。

圖10 商用促動器
音圈電機促動器可分為卸載裝置和音圈電機兩部分。通過卸載裝置對鏡面提供支撐和位移,使音圈電機在小負載下工作。音圈電機的力可視為施加到了卸載彈簧上,通過協助彈簧伸長或壓縮,使輸出軸精密的移動。如圖11和圖12所示。因而促動器的精度取決于音圈電機的出力精度和彈簧的彈性系數。其中TMT促動器和E-ELT促動器相比,在驅動器和輸出軸之間安裝了杠桿機構,使驅動器的負載更小,能夠減少功耗和成本。但杠桿結構占用空間,且使輸出位移非線性,對促動器的行程會有一定影響。
巨磁致伸縮促動器是我國的一個研究項目,是針對拼接鏡面子鏡單元設計的[13]。如圖13所示。它的動作可分為兩個階段。先利用兩個相對較長位移的磁致伸縮促動器串聯,經過杠桿將位移放大,使促動器具有一個滿意的行程,再由高分辨率的磁致伸縮促動器進行精密的調節。

圖11 E-ELT,PSMT促動器

圖12 TMT促動器

圖13 巨磁致伸縮促動器
3.2 位移促動器結構對比
微位移促動器通過驅動結構產生力或轉矩,經過傳動機構傳遞到輸出軸,傳動機構同時也承擔著放大力和縮小位移的作用,使促動器精度更高,負載更大。各機構在促動器實際應用中的主要性能表現如表3和表4所示。對于采用音圈電機的柔性促動器,音圈電機屬于附加的用于精密調節的驅動結構。壓電陶瓷材料和巨磁致伸縮材料既可以作為精密調節的驅動結構,也可以通過杠桿將其行程放大,作為主要驅動機構。各種結構的性能表現均有優劣,無法找到一個完美的機構使其完全適用于微位移促動器的各項要求。在做促動器的設計時,應將優勢互補的機構搭配使用。如將液壓裝置和滑動絲杠結合,既解決了機構自鎖問題,也可使機構運行更加平順。將壓電陶瓷和杠桿結合,以解決其行程不足的問題。同時也可以考慮機構的優化,如對液壓機構優化,改善其漏液問題,以減少后期維護。

表3 驅動機構對比
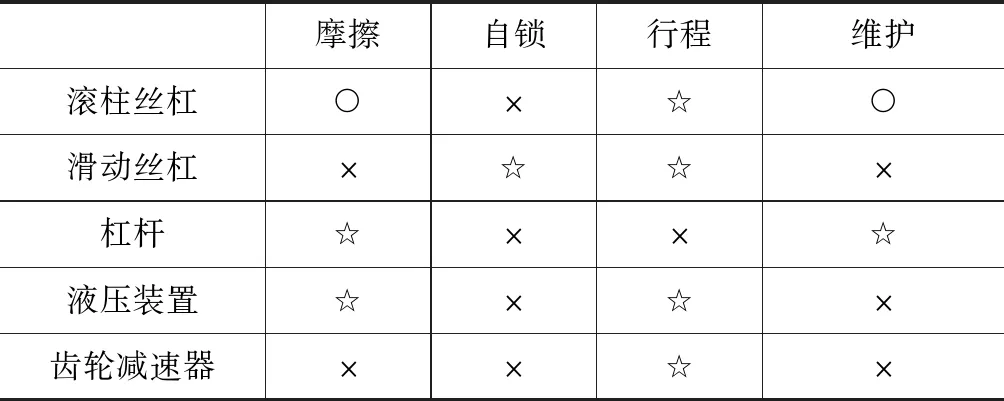
表4 傳動機構對比
3.3 微位移促動器輔助機構
除驅動機構和傳動機構以外,在設計微位移促動器時還應考慮移動部件的導向問題、轉動部件的軸向固定問題、系統的密封問題和預緊問題等。如輸出軸或滑動絲杠的螺母在軸向移動時,會因負載而產生徑向偏移,降低促動器精度;滑動絲杠在轉動時,如果不增加止推裝置則會使電機因承受軸向力而縮短壽命;同時,為防止滑動絲杠產生空回和液壓裝置產生負壓,需要對機構進行一定的預緊。
3.4 剛性促動器和柔性促動器對比
通常把應用音圈電機的、在不通電的情況下剛性很小的促動器稱為柔性促動器,如TMT促動器和E-EL促動器。相對于柔性促動器,將傳統的液壓促動器、絲杠形式的商用促動器和巨磁致伸縮促動器等稱為剛性促動器。應用自適應光學系統和子鏡支撐系統的閉環控制可有效抑制由重力、溫度變化和風載引起的擾動,而無法減緩由機械震動帶來的高頻率擾動[51]。TMT促動器在改進過程中,曾對剛性促動器和柔性促動器做出測試對比,應用音圈電機的柔性促動器能夠更好的抑制內部震動,應用壓電陶瓷的剛性促動器則在抑制風載干擾方面表現更好。但考慮柔性促動器最差的表現優于剛性促動器最差的表現,進而選擇柔性進行后續研究。而應用壓電陶瓷的剛性促動器由于采用了力反饋機制,同樣可滿足其可靠性評估要求,將作為備選設計[15]。E-ELT在剛性促動器上采用正位置反饋對系統震動做主動抑制,在極低的成本下實現優異的性能[16],證明剛性促動器同樣具有一定的發展空間。
參考以往的促動器試驗經驗,對剛性促動器和柔性促動器的優缺點做出對比,如表5所示。
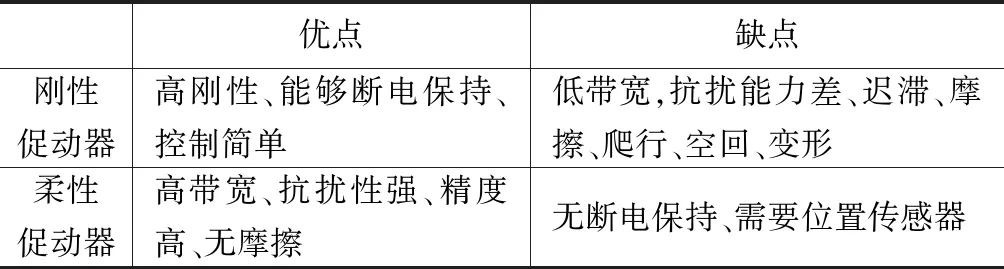
表5 剛性促動器和柔性促動器對比
剛性促動器雖然抑制震動能力差,但加以應用適當的反饋機制以及合理的算法控制,可改善其抗擾性能。受促動器整體剛度的影響,負載變化會引起促動器結構伸長或縮短,使促動器輸出位移偏大或偏小。而柔性促動器依靠位置傳感器確定步長,其動作量只服從傳感器信號,不受促動器變形影響,故理論上處于絕對剛性。
3.5 微位移促動器的測試
微位移促動器在試制完成后要經過一系列的測試,以檢測其是否滿足設計要求。針對促動器的分辨率,可多次測量促動器最小步長然后求平均值,或在檢測分辨率不足的情況下,每次測量最小步長的若干倍,最后計算分辨率。對促動器的平均定位精度,應多次測量任意方向、任意步長的定位誤差,最后計算其平均值作為平均定位誤差。對于柔性促動器,因其為閉環控制,故其定位結果在設定值左右波動,應對其穩定時的平均波動誤差和運動時的平均波動誤差進行測試。此外,隨著望遠鏡口徑的增大,還應考慮風載帶來的擾動和望遠鏡結構的震動,所以應對促動器進行風載和震動的抗擾性測試。
4 結論及展望
目前10米級望遠鏡微位移促動器的行程均在2 mm以內,且均為剛性促動器。若將其行程擴大,將會導致傳動機構的縮放比過大,或導致縮放之前的行程過大,以致累積誤差增大。而杠桿由其縮放比例和杠桿大小相關,且過大的縮放比例也會導致輸入和輸出位移的非線性,使其進一步應用受到限制。然而多年的實際應用證明,傳統的剛性促動器具有相當優異的可靠性,對于機構固有的摩擦、滯后、爬行和變形等影響,可通過在輸出軸增加位置傳感器的方式加以改善,以期實現未來望遠鏡所需要的大行程。而對于抑制望遠鏡結構中的振動問題,可選擇應用主動阻尼技術,或改用結合音圈電機的柔性結構。音圈電機由其具有高精度、高靈敏度和高帶寬等性質,使其能夠解決機械振動和風載等帶來的擾動,適合在微位移促動器中開展更深入的應用。
隨著望遠鏡口徑的不斷增大,對促動器性能要求也變得更高。既要求其滿足超高的精度要求和超大的行程要求,又要同時兼顧功耗要求和預算要求,以及一定的抗擾能力。同時因其維修和更換的不便性,使系統應具有更高的可靠性及更長的壽命。設計符合發展要求的微位移促動器仍然具有很大挑戰。國內在拼接鏡面微位移促動器設計方面的經驗不多,考慮到未來自主大口徑望遠鏡的發展,應該在促動器方面做進一步的探索。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
