基于物聯網多源協同感知井下精準定位算法研究
2021-03-08 09:41:28王鈺寧周紹軍劉曉霞
軟件工程 2021年1期
關鍵詞:物聯網
王鈺寧 周紹軍 劉曉霞

摘? 要:針對單一感知技術對礦井井下人員或設備定位存在的不足,本文提出一種基于物聯網多源協同感知的礦井井下精準定位算法。首先對物聯網井下感知定位系統框架進行設計;然后從多源多視角定位原理出發,提出基于物聯網多源協同感知的礦井井下精準定位算法;最后將本文算法與參考文獻算法進行實驗和對比分析,得到各算法的定位置信概率與誤差的比較曲線。通過實驗和對比分析可知,本文算法具有一定的實用性和先進性。
關鍵詞:精準定位;井下;協同感知;多源;物聯網
中圖分類號:TP76? ? ?文獻標識碼:A
文章編號:2096-1472(2021)-01-35-04
Abstract: This paper proposes a mine precise positioning algorithm based on multi-source collaborative sensing of the Internet of Things (IoT), aiming to improve single sensing technology for locating personnel or equipment in underground mines. First, a framework of IoT mine sensing and a positioning system are designed. Then, a mine precise positioning algorithm based on the multi-source collaborative sensing of the IoT is proposed from the principle of multi-source and multi-view positioning. Finally, experiments and comparative analysis are carried out between the proposed algorithm and the reference algorithm, and the comparison curve of probability and error of each algorithm at a fixed position is obtained. The proposed algorithm proves to be practical and advanced.
Keywords: precise positioning; mine; collaborative sensing; multi-source; Internet of Things
1? ?引言 (Introduction)
礦井井下安全是礦井生產的生命線,而井下安全最為重要的部分就是井下作業人員的安全。井下作業人員定位是確保井下作業人員安全的重要保障之一,并能對井下作業人員實時定位,為井下應急救援、人員作業管理以及礦井建設等提供重要位置信息[1]。物聯網(Internet of Things, IoT)多源協同感知定位技術是利用物聯網感知技術,如各種傳感器、射頻識別和全球定位等,實現實時采集、監控、連接、互動,進而達到物與物、物與人、人與人的泛在連接和物的智能化感知、識別和管理。但礦井有其自身特點,常規定位因無線信號的非直射徑向誤差和多徑衰減等,導致定位精度低和適應性差等缺點,因此,必須采用先進的物聯網多源協同感知定位技術,來改善和提高井下定位的精度和適應性等[2]。
對礦井井下定位的研究而言,國內外產業界和研究者進行了諸多研究和探索,其定位方法可分為鄰近信息法、場景分析法和幾何特征法等。其中幾何特征法目前應用最廣泛,又分為三邊定位法、三角定位法和雙曲線定位法[3]。無論何種定位方法,都離不開無線通信技術的支撐,礦井定位的無線通信技術主要有WiFi、RFID、UWB和ZigBee等。定位時使用精確的測距方式予以實現,而測距方法主要基于檢測接收信號強度指示(Received Signal Strength Indication, RSSI)的測距模式,該模式以RFID、ZigBee、WiFi等無線通信技術為支撐;另一種是基于傳輸到達時間(Time of Arrival, ToA)和到達時間差(Time Difference of Arrival, TDoA)的測距模式,該模式以線性調頻擴頻(Chirp Spread Spectrum, CSS)及UWB(Ultra Wide Band, UWB)等無線通信技術為支撐[4]。礦井井下定位主要用于礦井作業人員或設備的定位,大多采用基于RSSI、ToA和TDoA測距的定位方法[5]。而到目前為止,研究者們對井下定位取得了新的進展,如文獻[6]對地下開采巖體結構中的微震聲源進行定位研究,提出一種基于解析迭代解的多傳感源協同定位算法。
綜上,現有研究未充分利用物聯網技術,為礦井井下定位提高精確協同定位技術和方法等,有待進一步研究,以實現精確定位。因此,針對礦井現有定位方法存在的問題,利用無線超高頻測距、慣性導航、多源混合定位與多源信息融合等技術,對其進行物聯網多源多視角感知的協同精確定位方法研究,提出一種具有較高時間準確性和低環境影響率的精確定位算法,以實現井下作業人員和設備的精確定位、大型移動設備人員接近檢測、采掘裝備與井下搜救人員(機器人)自主導航與定位等服務。
2? ?系統架構(System architecture)
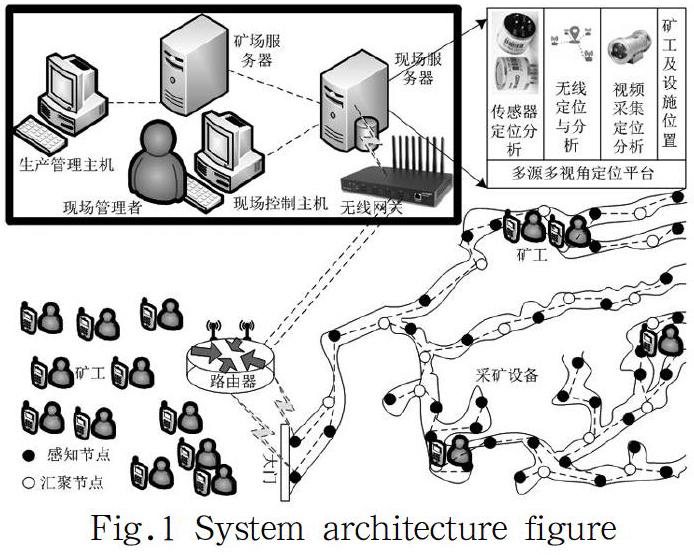
礦井井下有其自身的特點和特殊的要求,其能見度非常低,重巖墜落的可能性十分巨大,另外隨時可能產生危險的易燃易爆有毒氣體。礦井一旦發生事故,都涉及人員生命安全,其救援難度亦是非常大。因此,急需引入新的物聯網技術,解決井下作業人員和重要設備設施的定位問題。物聯網的發展和普及,為礦井井下定位提供了新的思路和范式,利用物聯網多源多視角感知技術,可提供多源協同的精確定位服務,其系統架構如圖1所示。
如圖1所示,在礦井井下布置三類特性的節點,移動特性不強的大型設備節點、作業人員的動態感知節點和信息感知與傳輸匯聚節點。每個節點由多種感知態勢組成,如信息感知與傳輸匯聚節點就集信息感知與傳輸匯聚于一體,一方面要實現實時的信息感知任務;另一方面要進行信息的傳輸匯聚,將控制和命令信息傳輸到井下作業人員和大型設備。這三類節點,起到兩方面的作用,一是對人員和設備進行感知;二是對感知信息進行傳輸與交互的匯聚節點。因此,井下部署節點為感知節點和匯聚節點,人員為自身攜帶的感知設備構成感知節點。對圖1進行形式化抽象,得到如圖2所示的示意圖。
由圖2可知,感知層由各種傳感器、感知節點和匯聚節點構成,其中傳感器負責井下數據采集,感知節點主要對感知到的數據進行現場處理與發送,匯聚節點主要是傳輸井下感知數據、接收經網絡傳輸來的應用命令和產生井下WiFi信號等[7]。感知層的傳感器主要有井下傳感器、視頻傳感器和井下人員的WiFi指紋及人體傳感器;井下傳感器主要有瓦斯傳感器、一氧化碳傳感器、風速傳感器、風壓傳感器、溫度傳感器、開停傳感器和風門傳感器等,這些傳感器中,與定位相關的為視頻傳感器、井下作業人員的WiFi指紋及人體傳感器。網絡層主要由路由器與井下匯聚節點進行通信,并與后端系統進行連接。應用層由井外傳輸網絡和后端系統構成。后端系統通過網關與路由器進行連接,服務部分主要由現場服務器、礦場服務器和現場監控主機等構成,其中礦場服務器連接礦內各職能部門,以便進行礦區管理;現場服務器運行傳感器定位、無線定位與分析和視頻定位與分析的多視角協同定位算法。
3? ?定位算法(Positioning algorithm)
3.1? ?多源多視角定位原理
由圖2可知,感知層的傳感器中,與定位相關的傳感器為視頻傳感器、WiFi指紋和人體傳感器,其中人體傳感器采用人體紅外傳感器,以感知人體離感知節點的距離。由此,得到多源多視角定位原理,如圖3所示。
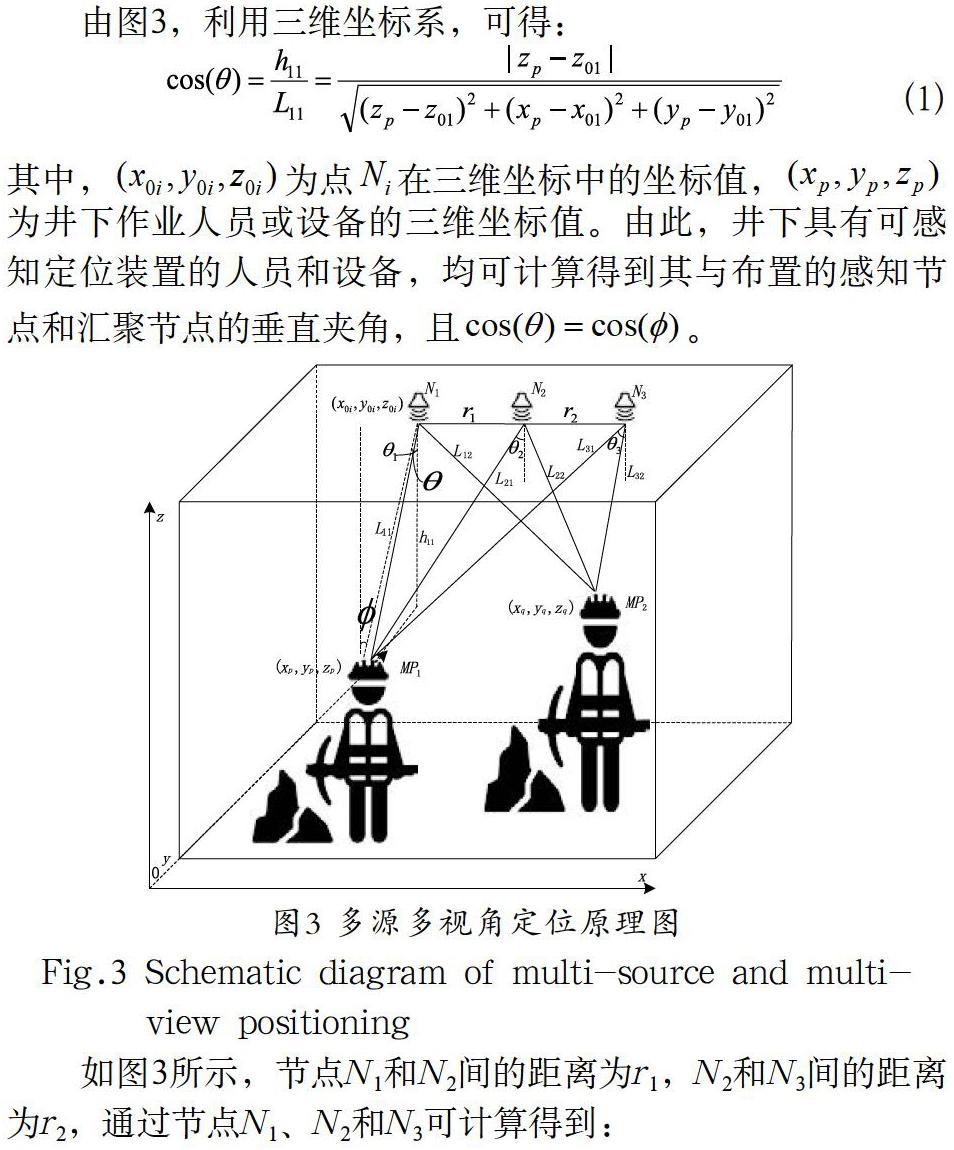
由圖3,利用三維坐標系,可得:
其中,為點在三維坐標中的坐標值,為井下作業人員或設備的三維坐標值。由此,井下具有可感知定位裝置的人員和設備,均可計算得到其與布置的感知節點和匯聚節點的垂直夾角,且。
如圖3所示,節點N1和N2間的距離為r1,N2和N3間的距離為r2,通過節點N1、N2和N3可計算得到:
然后利用式(1)和式(2),可求得井下作業人員的精確三維坐標。同理可計算任意進入井下作業的人員的三維坐標。
3.2? ?定位算法
為確保定位精度,采用多樣本特征提取技術實現實時在線井下作業人員及設備的精確定位。人員的特征提取來自視頻傳感器、WiFi指紋和人體傳感器的實時數據,與井下位置三維位置地圖數據庫一起,映射到實時位置變換矩陣,得到實時位置特征,結合實時協同定位算法,一起輸出精確的井下作業人員和設備設施的三維井下坐標,其過程描述如圖4所示。
如圖4所示,從原始多源感知數據集中提取含有位置特征的大量實時信息,來表征井下作業人員和設備實時位置的原始數據,然后與多源特征數據庫結合,利用多源多視角精確協同定位算法,得到井下作業人員和設備的精確位置信息,以實現實時精確定位。其算法步驟如下:
第1步:依據采集到的信息,利用式(1)和式(2),得到原始位置信息數據集,并用向量來表示,其中為井下作業人員在處采集到的三個信息源的向量,N為參考點個人員的向量構成的矩陣維度為。
第2步:映射定義。定義映射,其中為參考點所在歐幾里得空間,H為高階希爾伯特泛函空間,利用核函數:
計算H中的內積;式(3)中,表示向量。
第3步:數據標準化處理。對數據進行標準化處理,得到新的標準化數據集而更新原數據集,其更新后為:
然后對由式(1)、式(2)得到的多源感知下坐標數據進行RSS(Root-Sum-Squares)序列均值化處理,即可得到M維實時特征向量;對M維向量數據進行本征維度處理,得到:
其中,為監測點附近的多傳感器感知數據經式(12)處理后得到的個數;為距離的本征維度數。則式(13)即為被測點離感知點的最優距離。再利用式(1)、式(2)得到被測點的最優坐標值。
4? ?實驗與結果分析(Experiment and result analysis)
實驗在L型巷道中進行。如圖5所示為實驗測試使用巷道平面示意圖,使用兩種類型的節點,一種為感知節點,另一種為匯聚節點。實驗時按照圖1方式進行系統構建,被測對象為八位身高不一的同學,測得如表1所示每位同學所在點的三維數據。
對得到的實驗數據,利用本文算法進行多源協同精確定位算法的計算,并與文獻[8]—文獻[10]進行對比分析,得到如圖6所示的實驗結果比較分析圖。由圖6可知,文獻[8]和文獻[9]的誤差波動比較大,平穩性相對差一點,而文獻[10]采用融合定位方法,得到的對比數據有波動,但相對于文獻[8]和文獻[9]而言,還是比較好的。本文算法定位平均誤差較小,隨著測試點距離初始位置變遠,其誤差會變大,但穩定性較好。
5? ?結論(Conclusion)
單一感知技術對礦井井下作業人員或設備定位存在不足,因此本文提出一種基于物聯網多源協同感知的礦井井下精準定位算法。首先對物聯網井下感知定位系統框架進行設計,得到多源井下感知定位的系統框架;然后從多源多視角定位原理出發,提出基于物聯網多源協同感知的礦井井下精準定位算法;最后在校L型樓道進行實驗,并利用本文算法進行多源協同精準定位,與其他方法進行了對比分析。通過實驗和對比分析可知,本文算法在定位誤差和執行概率方面,具有一定的優越性。
參考文獻(References)
[1] Dong L, Zou W, Li X, et al. Collaborative localization method using analytical and iterative solutions for microseismic/acoustic emission sources in the rockmass structure for underground mining[J]. Engineering Fracture Mechanics, 2019, 210(4):95-112.
[2] Guo Jikun, Chen Sihan, Zhao Qing. Research on Optical Fiber Location System of Coal Mine Based on Φ-OTDR [C]. International Conference in Communications, Signal Processing, and Systems, CSPS, 2017:485-492.
[3] Ambarish G. Mohapatra, Bright Keswani, Shivani Nanda, et al. Precision local positioning mechanism in underground mining using IoT-enabled WiFi platform[J]. International Journal of Computers & Applications, 2020, 42(3):266-277.
[4] Firoozabadi A D, Azurdia-Meza C A, Soto I, et al. A Novel Frequency Domain VLC Three-Dimensional Trilateration System for Localization in Underground Mining[J]. Applied Sciences, 2019, 9(7):1-15.
[5]Rogers W. Pratt, Kahraman M. Mustafa, Drews Frank A, et al. Automation in the Mining Industry: Review of Technology, Systems, Human Factors, and Political Risk[J]. Mining, Metallurgy & Exploration, 2019(36):607-631.
[6] Dong Longjun, Zou Wei, Li Xibing, et al. Collaborative localization method using analytical and iterative solutions for microseismic/acoustic emission sources in the rockmass structure for underground mining[J]. Engineering Fracture Mechanics, 2019, 210(4):95-112.
[7] 汪金花,郭云飛,郭立穩,等.基于GRPM井下定位的MPMD匹配算法的試驗研究[J].煤炭學報,2019,44(04):1274-1282.
[8] 沈輝,李世銀.基于WiFi與PDR融合的井下定位方法[J].煤礦機械,2020,41(10):202-204.
[9] Karthikeyan A, Arunachalam V P, Karthik S. Performing Data Assessment in Terms of Sensor Node Positioning over Three Dimensional Wireless Sensor Network[J]. Mobile networks & applications, 2019, 24(6):1862-1871.
[10] 李宗偉,王翀,王剛,等.煤礦井下人員融合定位方法[J].工礦自動化,2020,46(1):59-64.
作者簡介:
王鈺寧(1982-),女,本科,講師.研究領域:物聯網數據感知與定位技術.
周紹軍(1971-),男,碩士,副教授.研究領域:計算機應用技術.
劉曉霞(1976-),女,碩士,副教授.研究領域:計算機應用技術,物聯網.
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06