空間電磁柔性對接技術
2021-03-05 14:03:26姜金鵬王昊東
兵器裝備工程學報 2021年2期
姜金鵬,楊 臻,王昊東
(1.中北大學 機電工程學院, 太原 030051; 2.中國兵器工業試驗測試研究院, 陜西 渭南 714200)
傳統航天器對接裝置主要包括:抓手-碰鎖式、電磁式、三爪式、機械臂式、類錐-桿式等,其中電磁式對接裝置具有對接沖擊小、沒有羽流污染以及質量輕等諸多優點[1-5]。空間電磁對接通過安裝在相鄰兩個航天器上的電磁線圈所產生的電磁力來控制它們之間的相對運動實現對接。空間電磁對接的作用距離較短,在衛星電磁對接之前衛星的姿態控制系統會將對接衛星與目標衛星和初步調整一致,但姿態控制系統的誤差(俯仰角約≤0.15°,滾轉角約≤3°)通常不容忽視[6]。空間電磁柔性對接技術針對姿態控制系統作用完成后(對接衛星與目標衛星距離≤0.5 m)對接衛星與目標衛星之間的姿態誤差進行高精度控制,提高對接時衛星姿態的一致性,降低對接時的相對速度減小碰撞,實現柔性對接。
本文首先建立Maxwell三維電磁有限元模型,計算出衛星空間電磁柔性對接加速靠近階段與柔性對接階段帶有姿態角度誤差的電磁力/力矩,然后通過MATLAB建立牛頓-歐拉方程解析出衛星對接過程中時間相對加速度、對接距離、相對速度、角度以及角速度等關系為動力學的仿真提供輸入和參考,將電磁有限元的計算結果導入到ADAMS的模型中進行仿真,最后通過對比分析剛體動力學模型與MATLAB的計算結果,驗證空間電磁柔性對接過程中的姿態調整能力以及衛星對接過程中的動力學特性。
1 工作原理
電磁柔性對接系統采用三組電磁鐵直列式布局,如圖1所示,主電磁鐵位于中間,副電磁鐵伴隨兩側。通過改變電磁鐵中電流大小及方向控制主被/動衛星間的電磁力/力矩,從而在較短距離內調整主/被動衛星的相對速度并修正姿態誤差。
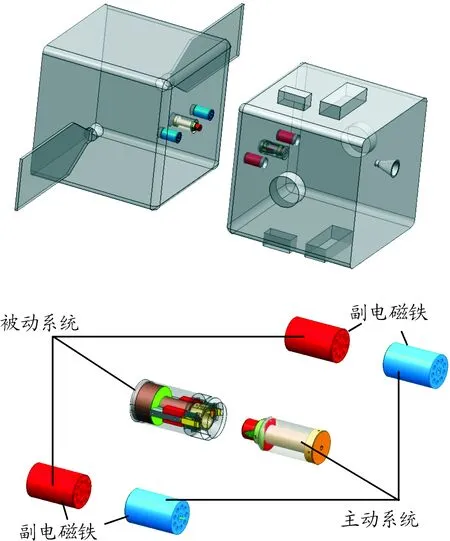
圖1 衛星及電磁鐵模型示意圖
兩衛星在110~500 mm范圍內為加速靠近階段,如圖2所示,此階段主動衛星與被動衛星對應的電磁線圈接通相同方向的電流,產生電磁引力。利用副電磁鐵產生的基于衛星質心的電磁力矩對衛星的俯仰/滾轉角度差進行修正,實現加速靠近和對接姿態調整。0~110 mm范圍內為柔性對接段,如圖3所示,此階段主動衛星與被動衛星內的主電磁線圈接通反向電流,產生電磁斥力,副電磁鐵減小電流,保持較小電磁引力用于維持姿態穩定。在該階段調整衛星的滾轉角,并在主被動衛星在發生對接接觸之前,使主動衛星與被動衛星相對速度接近0 m/s。滾轉角和俯仰角的調整方式如圖4和圖5所示。
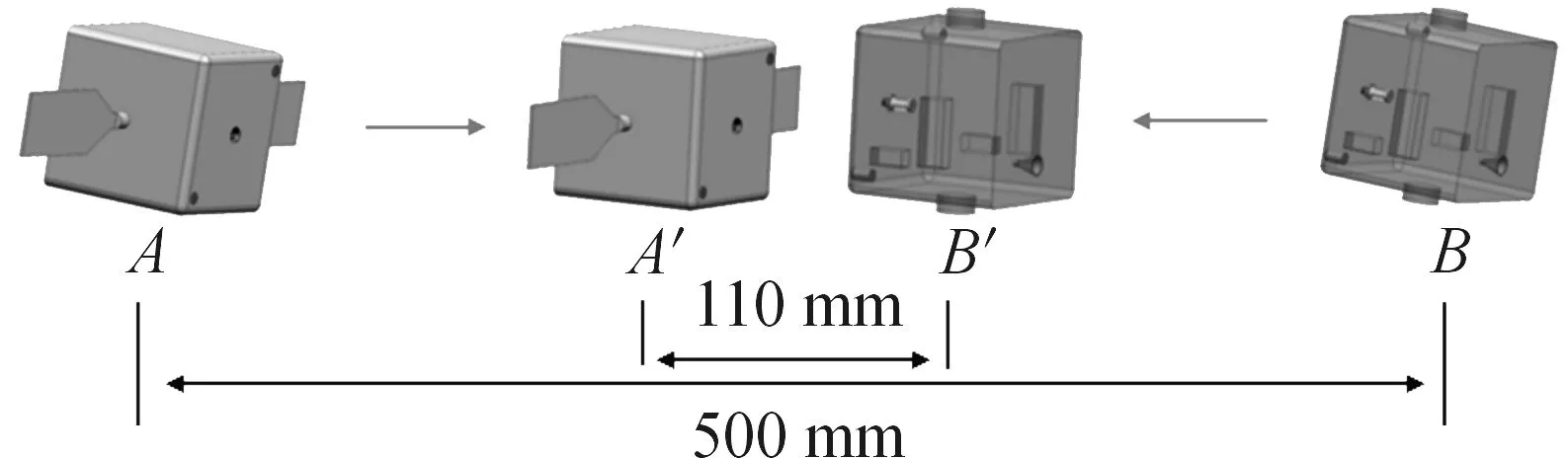
圖2 加速靠近段示意圖
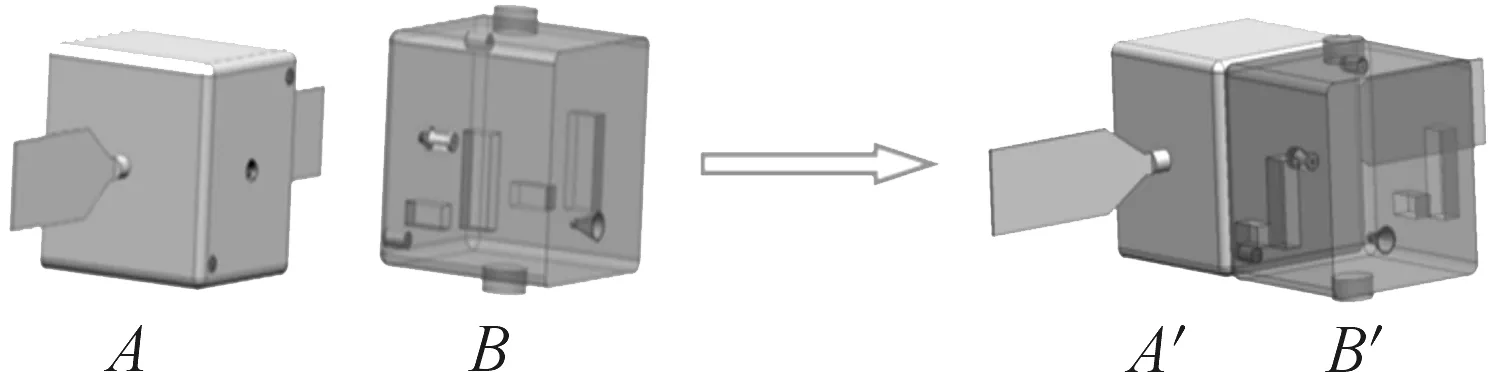
圖3 柔性對接段示意圖
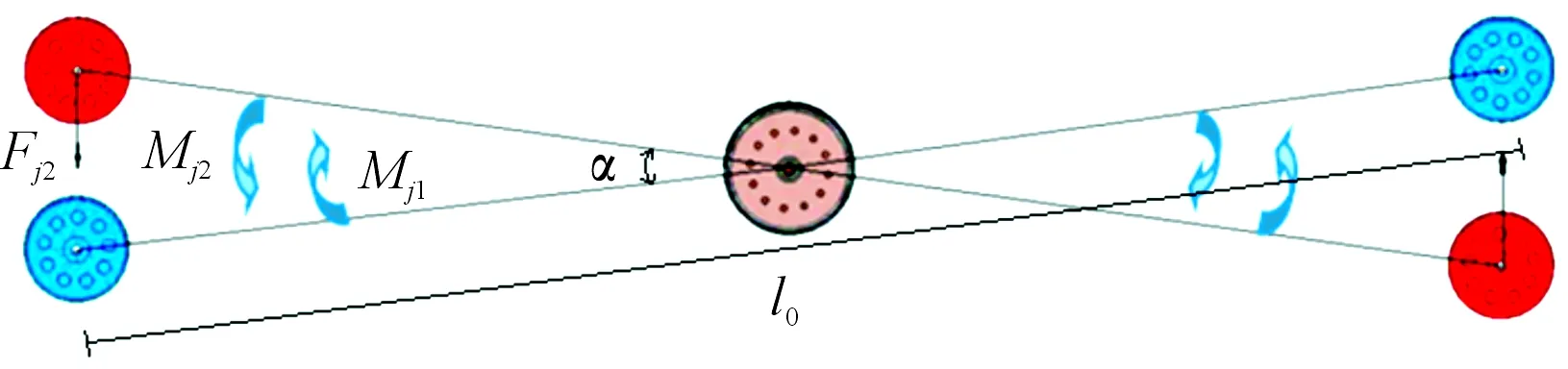
圖4 滾轉角調整示意圖
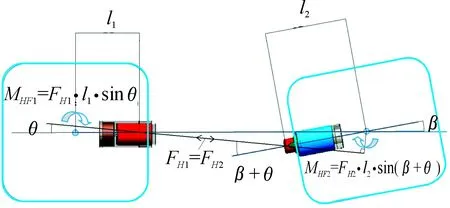
圖5 俯仰角調整示意圖
2 電磁有限元模型的建立及仿真分析
2.1 電磁鐵模型建立
在空間電磁對接過程中,要求對接過程和電流變化緩慢進行,近似將衛星間的磁場簡化為三維靜磁場。電磁鐵的磁場強度主要受到衛星的體積、功耗以及發熱平衡約束[7]。電磁鐵的尺寸參數如表1所示。
電磁鐵是由螺線管和鐵芯組成的,鐵芯為實心圓柱體,指定鐵芯材料屬性為Steel_1008;假設螺線管的幾何模型為空心圓柱體,指定線圈材料屬性為copper;在線圈截面施加電流激勵源,電流激勵源source =電源電流×線圈匝數。選擇自適應網格劃分,用包裹全部模型的立方體真空域做邊界域。
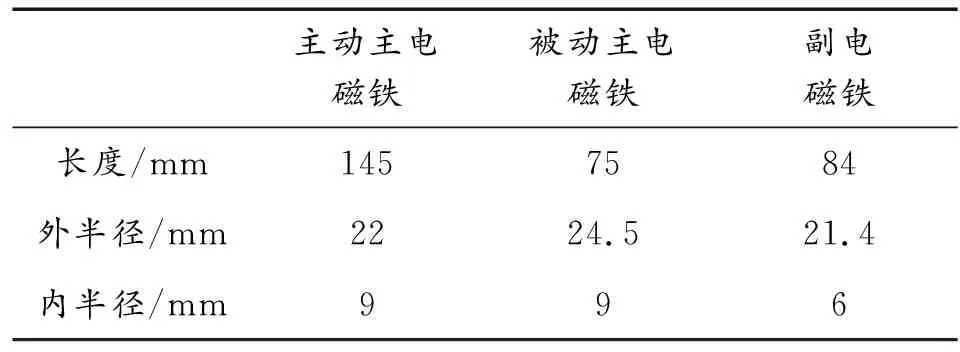
表1 電磁鐵參數
1) 加速靠近段。設置俯仰角度范圍:0° ~0.15°,滾轉角度范圍:1°~3°,設置相對距離:500 mm~110 mm,步長:5 mm。輸入參數設置見表2,電磁有限元模型如圖6所示。
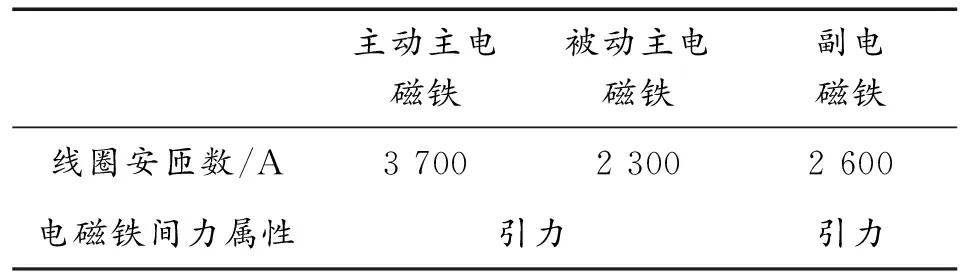
表2 加速靠近段電磁鐵輸入參數及電磁鐵間力屬性
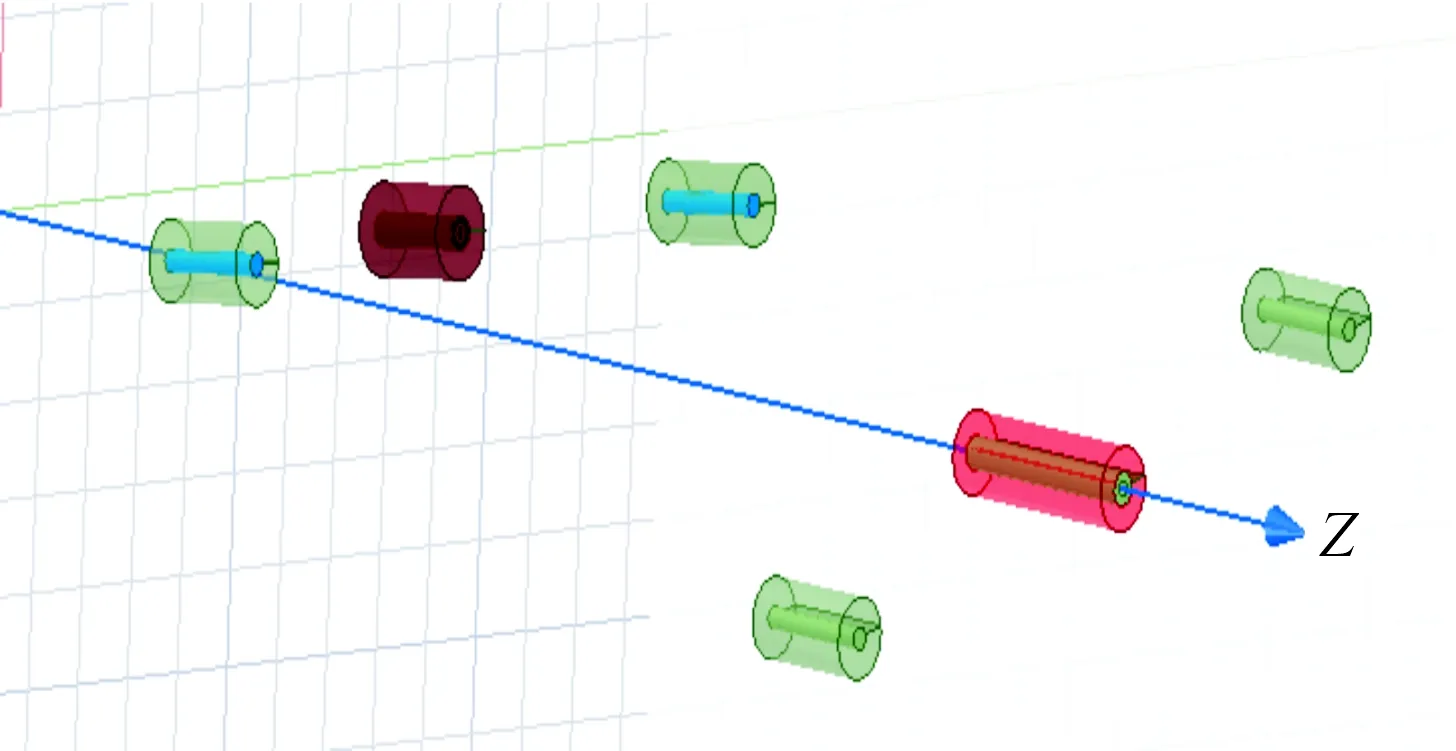
圖6 加速靠近段電磁鐵模型示意圖
2) 柔性對階段。設置滾轉角度范圍:1°~3°,設置相對距離:110 mm~0 mm,步長:5 mm,輸入參數設置見表3,電磁有限元模型如圖7所示。
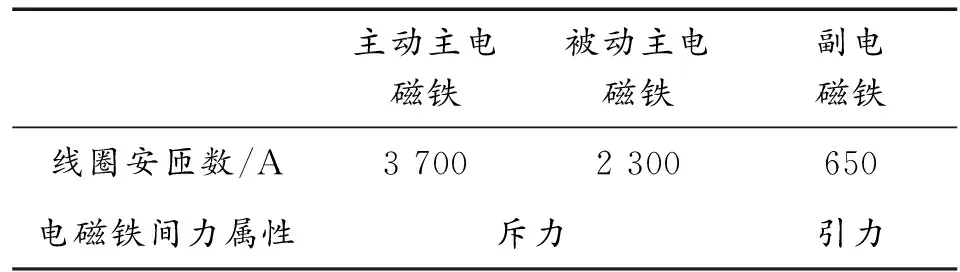
表3 柔性對接段電磁鐵輸入參數及電磁鐵間力屬性
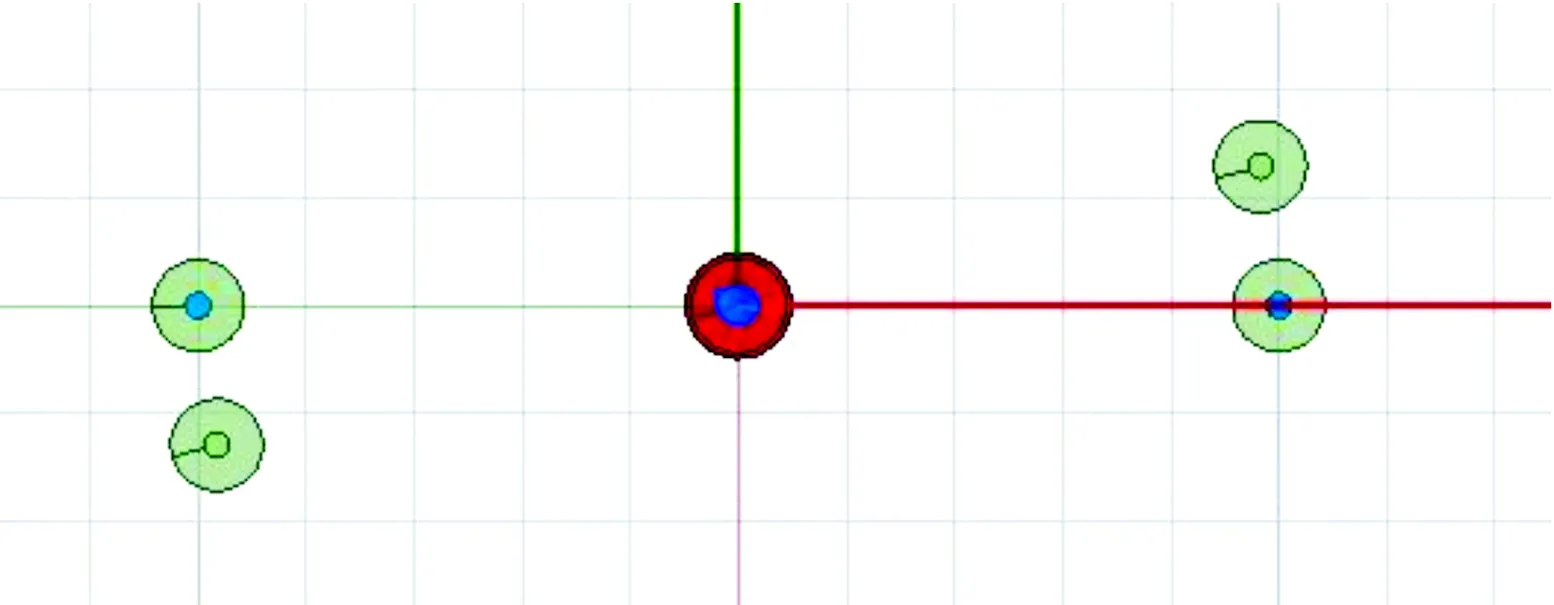
圖7 柔性對接段電磁鐵模型示意圖
2.2 仿真結果
假設主動衛星與被動衛星對接平面之間相對距離(即電磁裝置間的相對距離)L0為自變量。主動系統電磁裝置Z軸方向受力大小為Force10_z,被動系統電磁裝置Z軸方向受力大小為Force11_z,輸出不同距離時電磁裝置之間產生的Z軸方向電磁引力如圖8所示。
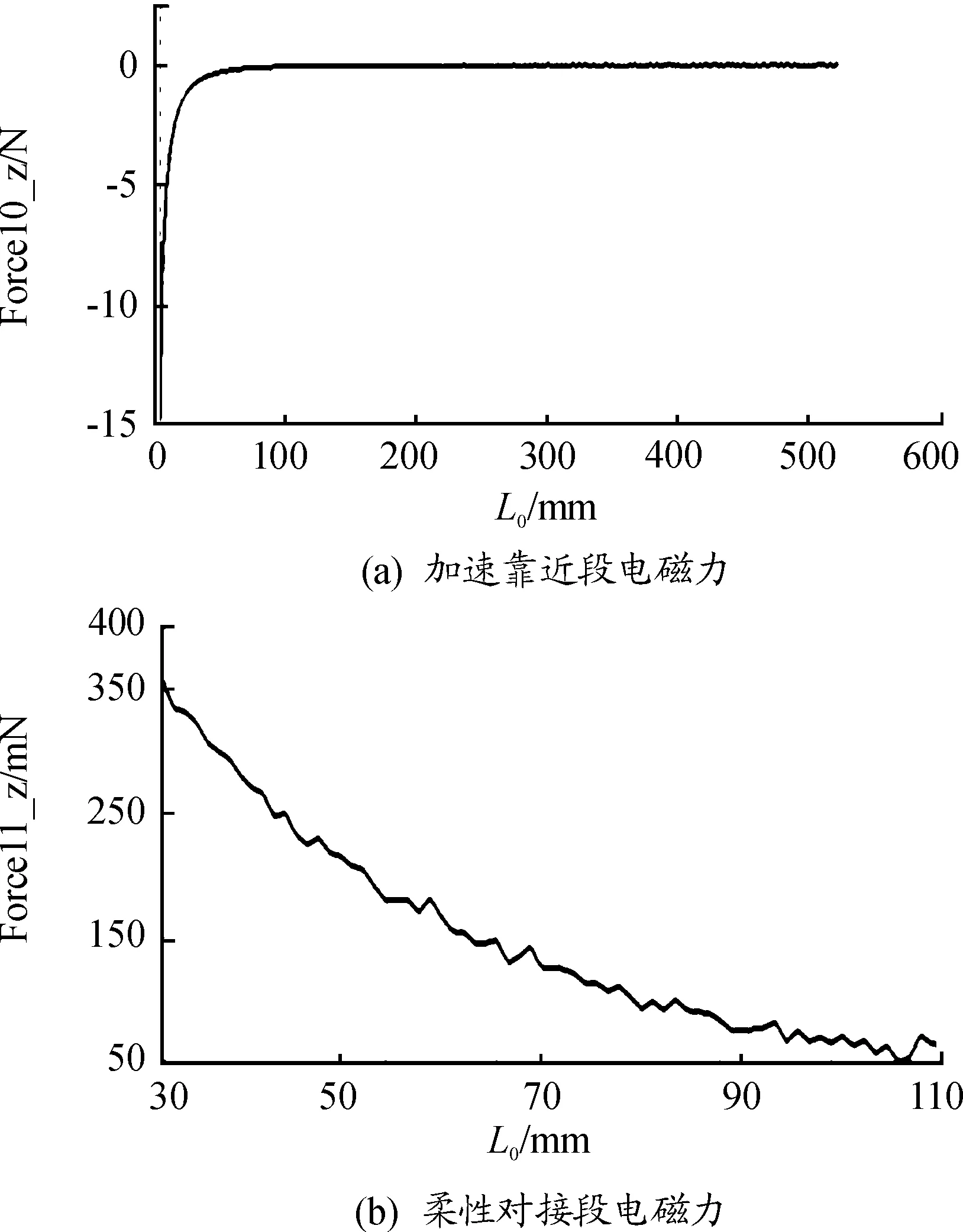
圖8 電磁裝置間電磁力與距離關系曲線
假設兩模塊化衛星為質量和慣性矩均相同的實心正方體,衛星的初始速度與初始的角速度均為零,根據牛頓-歐拉方程及有限元積分法計算出時間-相對速度、時間-滾轉角、時間-俯仰角關系,結果如圖9所示。
根據計算結果得出柔性對接過程和姿態調整過程如下:
1) 加速靠近段,主動衛星與被動衛星由相對距離500 mm加速靠近至距離110 mm處,相對速度由0 m/s加速至0.016 m/s,調整俯仰角度0.384 7°,調整滾轉角度0.275 9°,該階段用時96 s;
2) 柔性對接段,主動衛星與被動衛星由相對距離110 mm處開始減速靠近至距離46.5 mm處,相對速度由0.016 m/s減速至0.000 67 m/s,調整滾轉角度0.1180 5°,該階段用時9.6 s;
3) 主動衛星與被動衛星由相對距離46.5 mm處開始加速靠近至接觸,接觸時相對速度為0.005 4 m/s。
電磁柔性對接過程共調整俯仰角0.384 66°,滾轉角 0.393 95°。
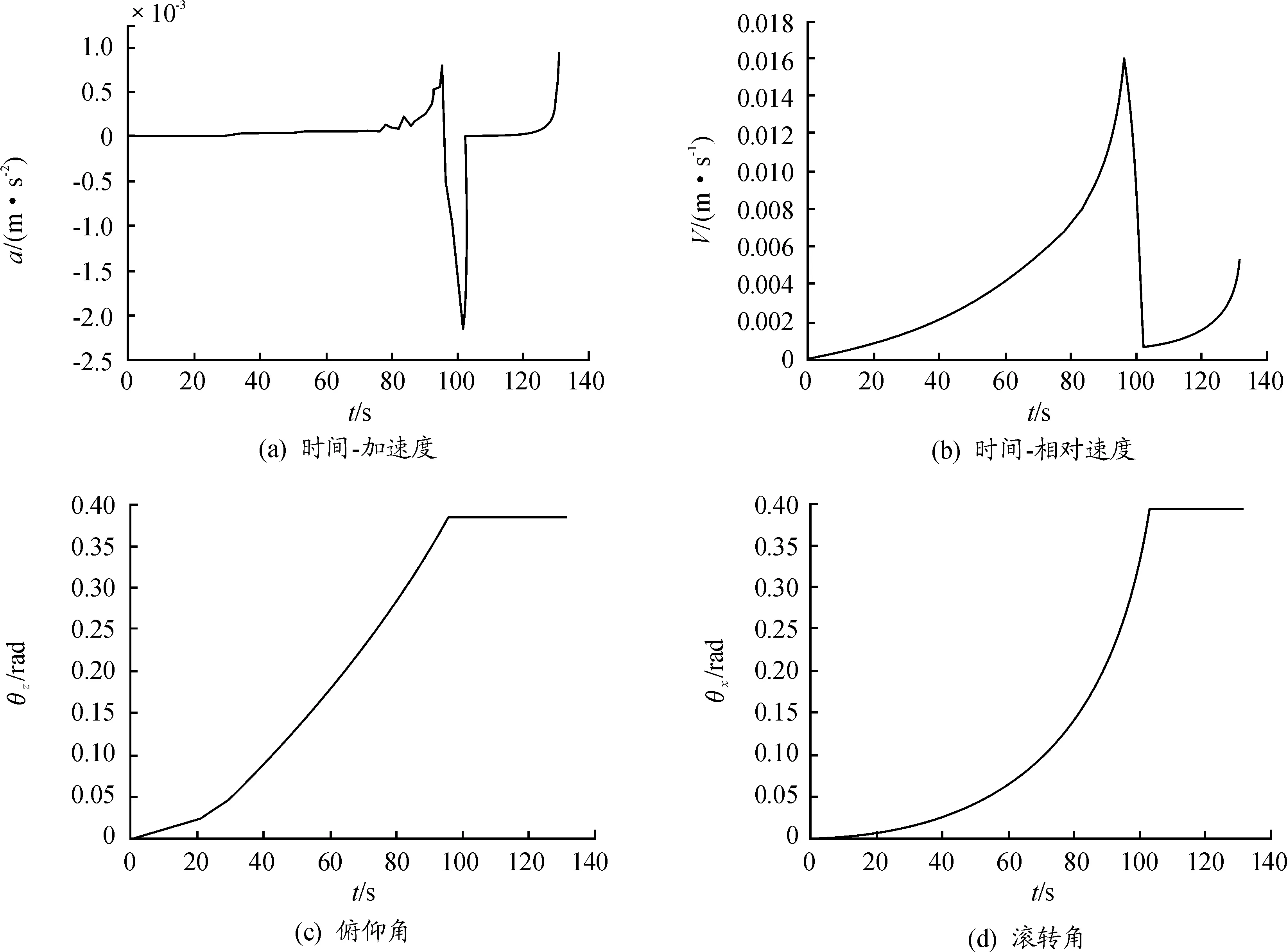
圖9 衛星電磁柔性對接過程計算曲線
3 動力學模型
3.1 模型定義與假設
模型定義以主動衛星與被動衛星以Z軸為對接軸,主動衛星與被動衛星相對距離500 mm。以主動衛星為基準定義兩衛星之間滾轉角度差為3°,俯仰角度差為4°。空間電磁柔性對接系統ADAMS模型如圖10所示。電磁鐵線圈指定為銅材料,鐵芯指定為鋼材料,將其余所有零部件均指定為鋁材料。
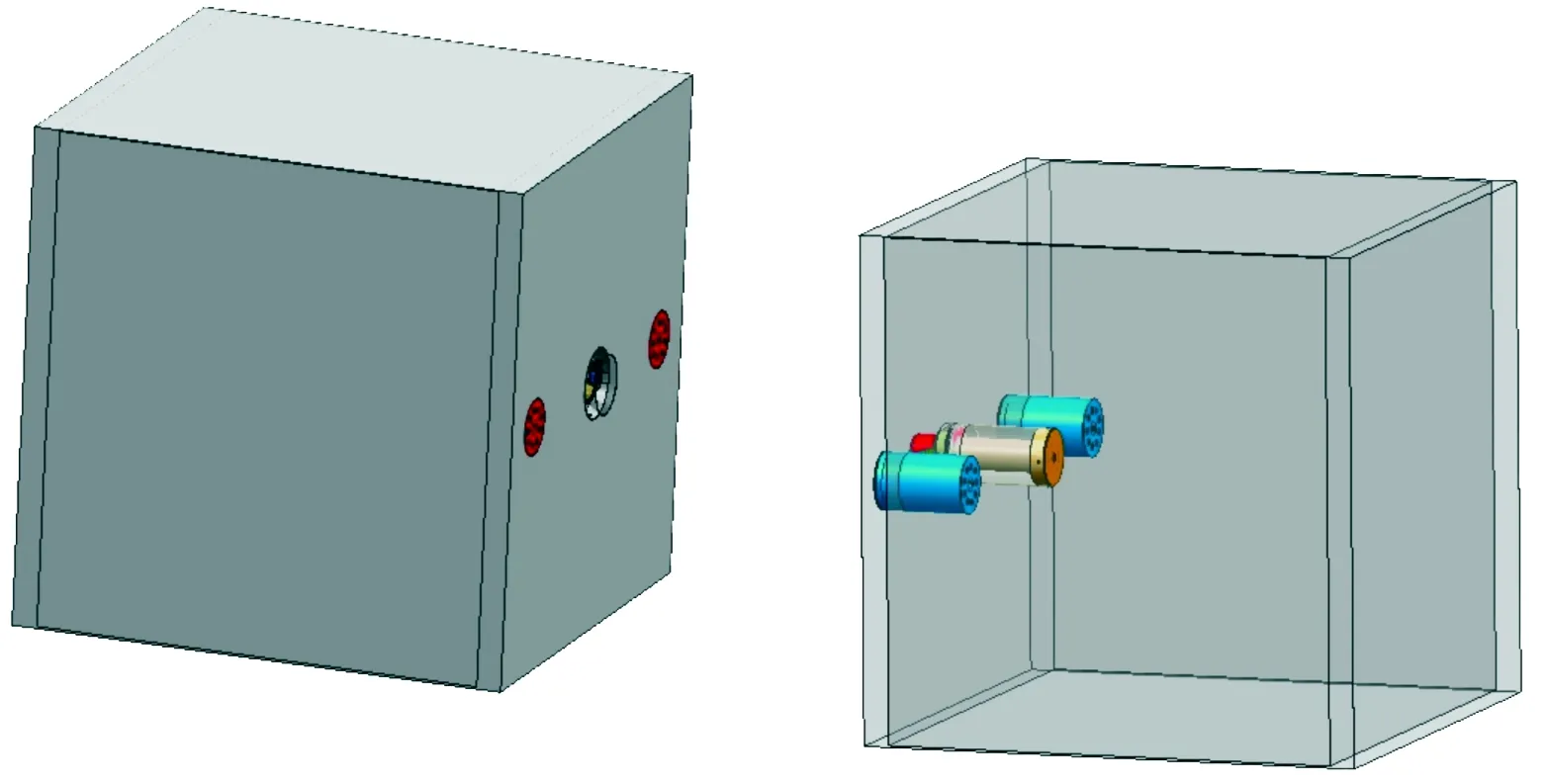
圖10 ADAMS動力學模型示意圖
空間電磁對接的動力學建模過程中,模型零部件較多,系統較為復雜,為減小計算量和縮短計算時間,對模型進行以下簡化和假設[5]:
1) 相互接觸且不參與運動的零部件之間進行布爾加和操作,作為一個零件處理;
2) 如無具體要求或特殊說明時,模型的零部件均看作剛體;
3) 模型按照實際的運動規律添加約束,不考慮模型的尺寸公差和誤差;
4) 動力學仿真按照在空間環境下進行,重力加速度為零。
3.2 仿真結果
將本文第2節中通過有限元分析與數值計算得到的兩衛星之間的電磁力與距離的關系,導入到ADAMS進行SPLINE插值,將電磁力的SPLINE函數用于驅動仿真MOTION,仿真結果如圖11所示。
根據全對階段動力學仿真結果可以看出:
1) 加速靠近段,主被/動衛星相對速度由0 mm/s加速至5.4 mm/s,調整俯仰角度0.051 7°,調整滾轉角度0.086 7°,該階段用時100 s;
2) 柔性對接段,主/被動衛星由相對距離110 mm處開始減速靠近,調整俯仰角0.257 4°,調整滾轉角度0.398 5°,該階段用時30 s;
3) 主動衛星與被動衛星接觸時的相對速度為0.004 59 m/s,柔性對接過程用時130.071 s,共調整俯仰角0.309 1°,滾轉角度0.485 2°。
4) 主被動衛星130 s時開始接觸,主動衛星與被動衛星之間發生碰撞,速度曲線產生震蕩。通過衛星內部裝置繼續調整滾轉角,至t=155 s對接結束時,共調整滾轉角差3.5°。
通過柔性對接的動力學仿真可以看出,電磁柔性對接技術的動力學仿真結果基本符合基于電磁有限元模型對接過程的計算結果。
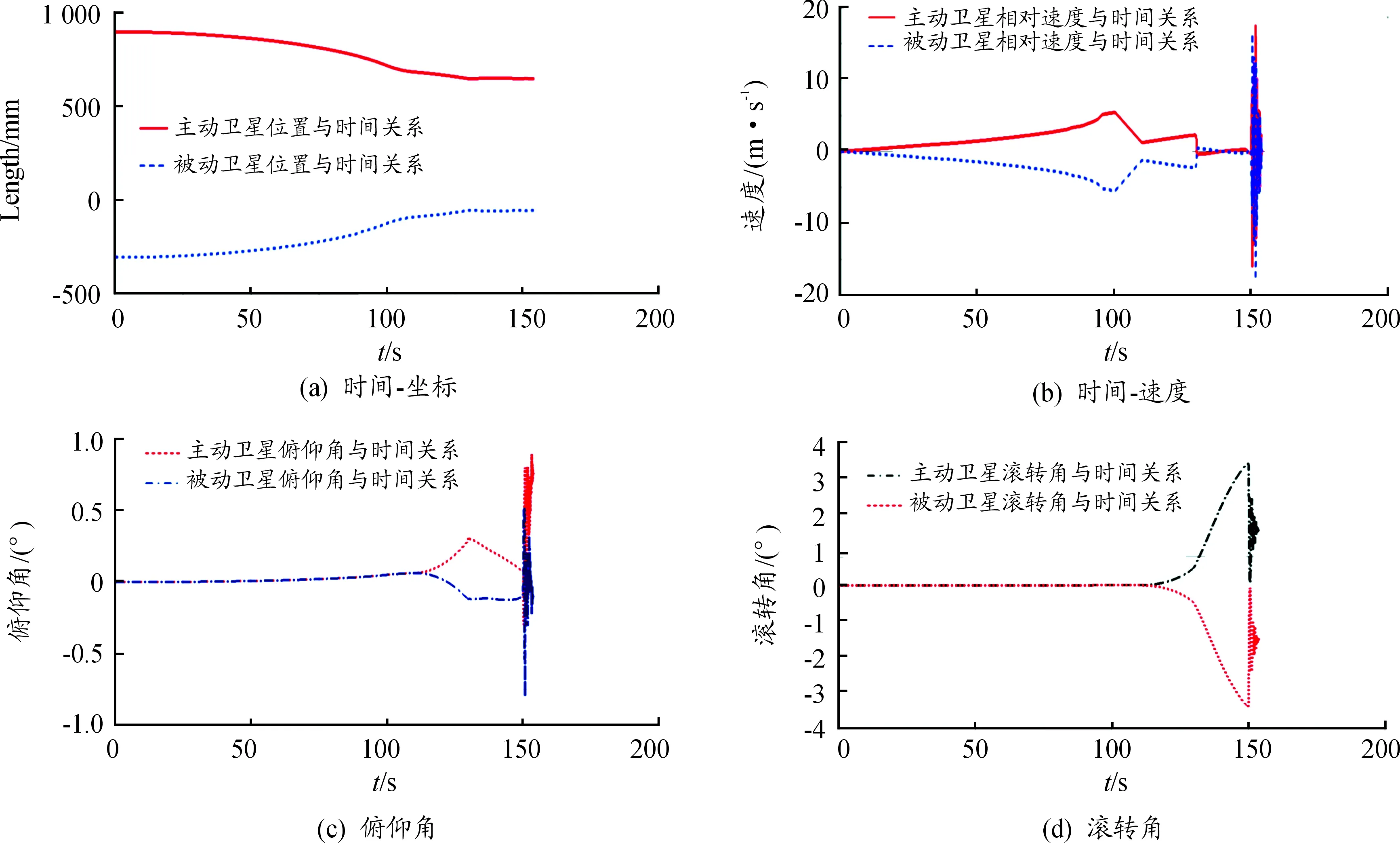
圖11 全對接段動力學仿真結果曲線
4 結論
1) 空間電磁柔性對接技術具有作用范圍≥0.5 m、俯仰角姿態調整范圍≤±0.38°和滾轉角姿態調整范圍≤±0.39°條件下實現對接速度≤0.005 5 m/s的能力。
2) 采用Maxwell 3D、MATLAB、ADAMS解決電磁學與動力學耦合計算方法,可用于實時仿真衛星在電磁力作用下的運動學與動力學過程。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
