智能網聯背景下汽車底盤線控子系統及其集成的綜述
2021-03-05 14:03:38羅寧延
汽車實用技術 2021年4期
羅寧延
智能網聯背景下汽車底盤線控子系統及其集成的綜述
羅寧延
(西華大學,四川 成都 610039)
自動控制技術已經在現代汽車上得到了廣泛應用,汽車電子控制技術的可靠性在不斷提高,汽車線控技術在汽車關鍵系統的運用日益得到青睞。文章的寫作是為了深入學習智能汽車線控系統,并為將來基于線控底盤的智能汽車上層控制技術準備基礎知識。文章介紹了線控技術的應用必要性及其定義,并展開介紹該系統中主要的子系統及其關鍵技術,最后將對該領域內面臨的主要關鍵問題做介紹。
線控系統;線控轉向;線控制動;線控油門;線控換擋
前言
隨著自動駕駛技術的興起和發展,對整車線控系統的要求也不斷提高,我們不僅要求功能實現,同時還對線控系統的系統功能安全性、使用環境可靠性等性能提出更高的訴求。
線控系統最早起源于飛機技術領域,又被稱之為電傳操縱技術[1]。主要是為了實現控制系統的信號化、自動化,通過引入控制器、傳感器模塊以及相應電信號傳輸線路將執行器、控制器聯系起來,實現對功能模塊的功能執行和反饋以及進一步的功能監控。
線控系統地引入對于原本的汽車而言主要有如下優點:1)優化原有機械機構,實現更加靈活的功能系統布置;2)使用電機作為執行器的線控系統整體上降低了系統質量,從而降低整車質量,有利于節能環保;3)采用線控系統的汽車更加易于進行二次開發,實現更多的定制化功能;4)由于具備電信號控制的執行機構,從而為自動駕駛系統的開發準備的基礎。
1 底盤線控系統子系統
目前在智能汽車中組成線控系統的主要是四塊子系統,油門(Accelerograph)、轉向(Steering)、制動(Breaking)、換擋(Shift)。下面我們對這四個部分進行分別論述。
1.1 線控油門系統(Accelerating-by-wire)基本結構及其原理
線控油門技術,即電子節氣門技術。主要的結構由加速踏板傳感器、控制器、傳遞線路以及節氣門執行器組成。線控油門系統的傳感器主要包括加速踏板傳感器、節氣門開度傳感器、車速傳感器、氧傳感器等,如圖1所示。
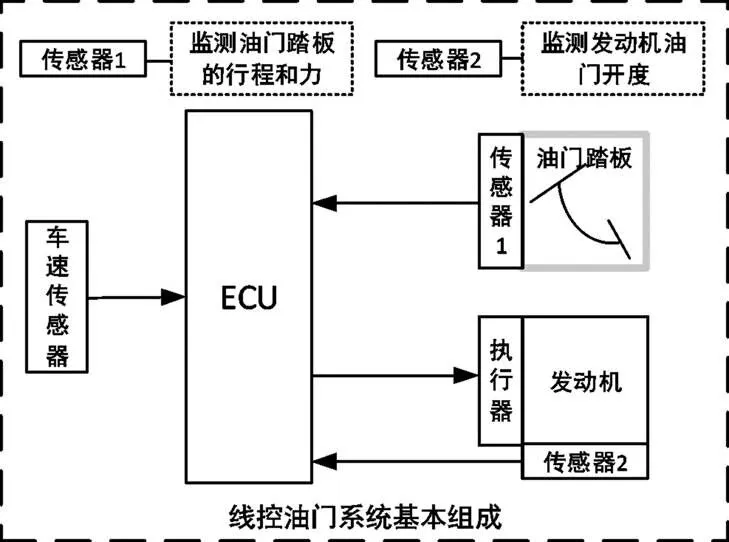
圖1 線控油門系統基本模塊
由于傳感器信號容易受到其他電子設備的影響,而發送錯誤信號給控制器。針對這一問題文獻[2]提出一種支持機線控驅動的控制器單元的雙冗余相互校驗硬件電路架構,用于避免信號錯誤,并設計開發出能夠對駕駛意圖進行判斷,實現故障診斷的安全監控策略。
1.2 線控轉向系統(Steering-by-wire)基本結構及其原理
線控轉向技術用于替換轉向盤和轉向車輪之間的機械結構。其主要組件由轉向盤模塊、轉向機模塊、整車傳感器模塊,其中轉向盤模塊包括:方向盤、轉向盤傳感器、路感電動機;轉向機模塊包括:轉向機、轉向機執行器;整車傳感器模塊包括:車速傳感器、加速度傳感器、橫擺角傳感器以及控制器,如圖2所示。
具體的功能實現是通過轉矩、轉速傳感器將駕駛員的轉向指令轉換為電信號輸入控制器,控制器輸出控制信號給執行器,執行器控制轉向輪動作,完成轉向操作。方向盤與轉向輪之間通過控制信號連接;傳動比可通過軟件自由設定;便于和其他系統集成、統一協調控制[3]。線控轉向系統主要由數字傳感器、電子控制單元、實時軟件、電子動力轉向裝置等組成[4]。
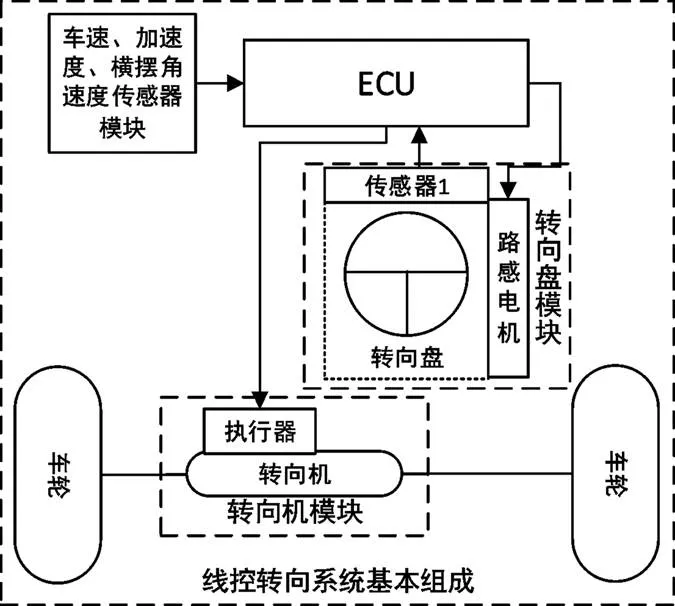
圖2 線控轉向系統基本組成模塊
值得注意的是,控制器還會收集其他傳感器的信號,識別路面狀況,并將相應的信號反饋給方向盤模塊,實現路感反饋。此外,線控油門類似,線控轉向系統的電子控制單元也具有類似于糾錯的功能,能夠對駕駛員操作指令結合行車狀態進行分析識別,判斷是否應該執行操作動作。例如,在高速行駛工況下,駕駛員大角度轉向動作將會被識別為誤操作,不會被傳遞到轉向執行器。
對于具備線控轉向系統的車輛相比與傳統車輛,除了已經提到的優點,還具有如下優點:
(1)由于使用電子控制器作為中間層,轉向動作控制更加靈敏,操作穩定性更好;
(2)由于取消轉向器與轉向盤的直接連接,在路面平順性欠佳的路面行駛時,操作舒適性顯著提高;
當你把克什米爾藍寶石用顯微鏡放大30-50倍,你會看到雪片狀的內含物和乳白色的條帶,也正是因為它們,克什米爾藍寶石才會有獨特的“天鵝絨”效應。
(3)由于采用電機作為執行機構,從而替代了原本油液動力傳遞介質,從而實現環保、節能。
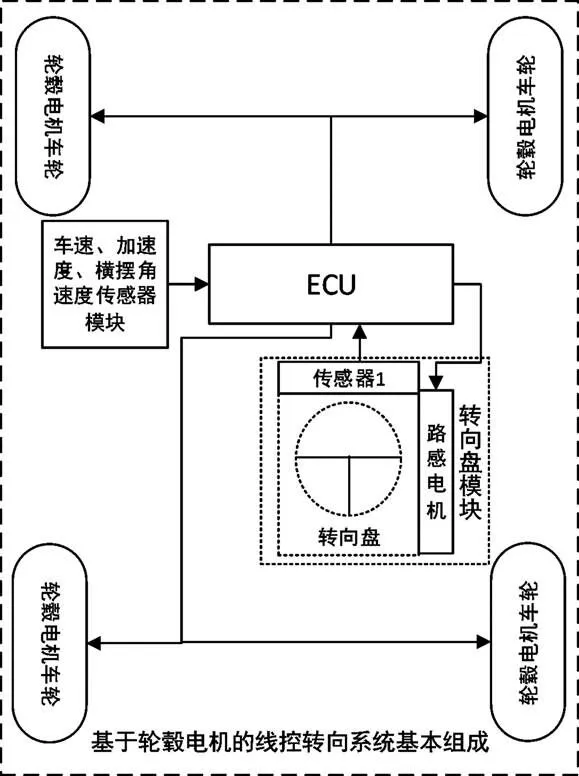
圖3 具有四輪輪轂驅動的線控轉向系統底盤結構
關于線控轉向系統,由于輪轂電機技術的改善,如2018年,舍弗勒公司發布The Schaefller Mover系統,該技術已經接近成熟,滿足整車需求,轉向軸心位于輪輞內部,車輪轉向包絡與傳統轉向方案基本一致。該方案匹配的輪轂電機可以實現 24kW,500N?m的輪端性能[5]。因此越來越多的研究者開始考慮將轉向機構集成僅輪轂電機模塊,從而實現更加靈活的轉向功能。其基本部件包括輪轂電機車輪、轉向盤模塊、控制器、整車傳感器模塊。其基本結構如圖3所示。
該技術的應用將在很大程度上讓出底盤空間,使沉重的電池布置在地板下,車輛重心降低,行駛穩定性提升;而由于集成輪轂電機的全新輪邊轉向取消了轉向器,使得多種特殊的轉向模式成為可能,包括快速換道、側方停車、小半徑轉彎和原地掉頭。
1.3 線控制動系統(Braking-by-wire)基本結構及其原理
制動系統是保證汽車安全行駛最重要的一項主動安全系統,是通過制動器與車輪的摩擦使行駛中的汽車按照駕駛員的意愿進行強制減速甚至停車,使汽車下坡行駛時保持速度穩定,以及在各種道路條件下停駛的汽車保持穩定不動的專門裝置[6]。
對于線控轉向系統的基本組成,如圖4所示,主要由制動踏板、制動踏板行程傳感器、控制器(ECU)、制動執行器、車速傳感器以及相應的信號傳輸線路組成。其中制動踏板傳感器將駕駛員對制動踏板的操作轉換為電信號傳輸給控制器,控制器則將包括制動踏板傳感器信號、車速傳感器信號在內的各類信號進行運算,判斷是不是正常的操作信號,避免駕駛員誤操作,如果經預設程序判斷為正常輸入,則進一步傳輸到執行器進行制動。
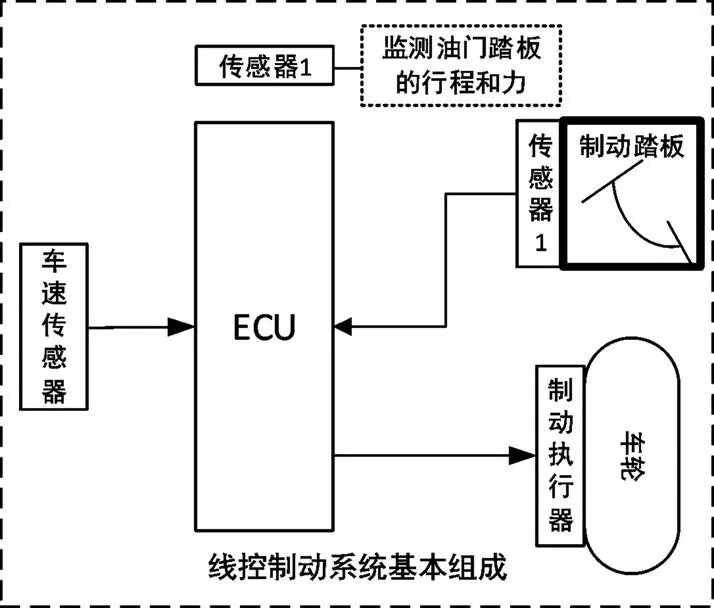
圖4 線控制動系統基本組成模塊
應用線控制動系統的優點如下:(1)系統結構簡單,省去大量管路系統及部件;(2)制動響應時間短,提高了制動性能;(3)系統制造、裝配、測試簡單快捷,采用模塊化結構,維護簡單;(4)采用電線連接,系統耐久性能良好;(5)易于改進,略加變化即可增設各種電控制功能。
關于線控轉向系統的相應精確性,目前有文獻[7]研究了空心電機直驅主缸方案:電機直驅供壓單元、高壓蓄能器供壓單元、電磁閥、制動輪缸、制動踏板,該研究實現了“快速建壓,精確控壓”的性能需求。
另外對于EV,獨立對四個車輪的線控制動系統的控制策略,也是目前的研究熱點,該方向的研究將有利于實現更高的行駛穩定性以及控制由于地面摩擦性質導致的突發事故。
1.4 線控換擋系統(Shifting-by-wire)基本結構及其原理
近年來,為了使搭載自動變速器(Automatic Transmis -sion,AT)的車型能實現全自動泊車功能,需要將傳統的通過搬動換擋桿帶動拉索拉動變速器換擋軸來實現P、R、N、D 的換擋方式,改為用電驅動直接驅動換擋軸的方式來實現換擋,該電驅動機構被稱為線控換擋執行機構[8-9]。該技術的應用同時也是高級輔助駕駛技術應用于自動擋汽車的關鍵技術支撐,包括自動變速行駛、自動P擋請求、實現手動/運動換擋模式、駕駛員安全帶保護、車門打開安全保護、實現整車防盜功能、多重硬線喚醒、駕駛習慣學習等等功能。
線控換擋系統的基本模塊包括:控制器、電子檔位選擇模塊、發動機與變速器模塊、換擋執行器模塊以及整車信號模塊。電子換擋選擇模塊將檔位信號發送給控制器,控制器再結合整車信號判斷是否處于可以操作的狀態,確認沒有隱患則向換擋執行器發送相應的換擋信號,執行器則進行換擋操作,同時將換擋切換信息顯示到儀表盤,從而完成原機械換擋操作以及動作反饋;如果存在隱患則將隱患信息發送到儀表盤,提醒駕駛員采取相應的措施。
關于采取線控轉向技術的優勢,主要有:1)電子換擋選擇器相比原有的換擋器質量更輕,體積更小,同時也易于維護;2)采取線控換擋技術能夠減少換擋安全性,提高功能可靠性。
2 底盤線控系統
前面我們已經闡述了線控系統的主要子系統,我們需要注意到,目前智能汽車線控系統往往是前面提及的幾大子系統的有機整合。由于子系統到整個系統并不是單純的裝配到統一,而是相互融合地形成一套具有高度一致性、高度統一性的復雜系統。因而這里我們有必要在從整個線控系統層面討論該系統的集成現狀和前沿技術。
2.1 底盤線控子系統集成
我們已經知道了線控子系統的基本構成,現在我們把子系統集成為相應的模塊,并集成為一個比較完成的車輛線控系統,該系統的簡要結構如圖5所示。
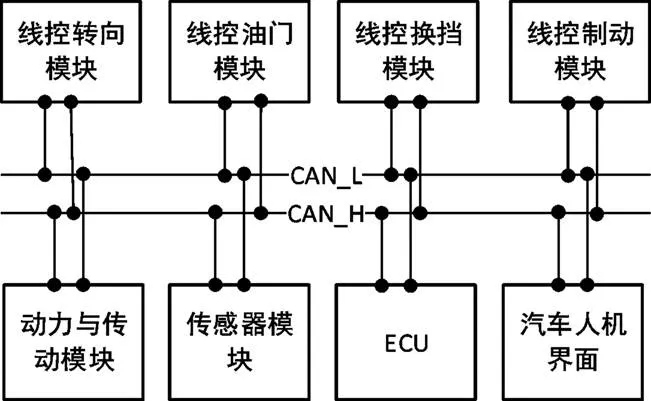
圖5 底盤線控系統集成于CAN總線
在集成的線控系統中,所有的相關傳感器信號被集成到傳感器模塊中,并接入總線;控制器同樣被接入總線中用于接收傳感器模塊和各個線控系統傳來的信號,并發布對各個線控子系統的控制信號,同時也向人機界面發布反饋信息,用于與車內人員的交互。
2.2 線控系統的前沿研究
對于應用于整個線控系統的前沿技術,我們這里僅僅對比較重大的前沿研究進行闡述。
2.2.1車用42 V電源系統的開發
目前線控系統的執行器主要是有大功率電動機或者大功率伺服電機作為主體。這樣執行器的功率消耗原高于原有的執行器。例如一個轉向電動機功率為550~800W,而電機盤式制動器的功率大約為1000W[10]。對于這樣的功率消耗,目前的12V汽車電源系統很難滿足,因而有必要對現有的電源系統進行必要的升級[11-12]。而采用42V電源系統則能夠較好滿足線控系統的用電要求,有利于適宜電動執行器的集成使用。當然,另一方面,車輛電源電壓的升高后也將會帶來相應的問題,例如電弧放電、電磁噪聲、絕緣和耐蝕性等一系列技術和安全問題,這些問題值得我們進一步研究。
2.2.2功能安全標準(ISO 26262)的應用
隨著電子技術的不斷發展,汽車系統電子系統在整個系統中的占比不斷加大,在使整個系統更加智能化的同時,也將整個車輛系統的復雜性提高到空前的高度。而電子系統是目前車輛系統的核心,在可靠性層面,電子系統的可靠性相比于機械系統要低,因而如何設計出具有高可靠性的電子系統,從而保證核心電子系統的功能安全是亟須我們考慮的[13]。目前,歐美廠商已經在廣泛采用功能安全標準ISO 26262進行相關電子系統的硬件、軟件的開發[14]。
而對于已經具備初步設計的系統,我們根據ISO 26262可以引入了相關的“冗余技術”以及“故障診斷”技術提高系統的安全可靠性[15-16]。特別是冗余技術,即容錯。傳感器冗余、執行器冗余等將在很大程度上提高線控系統的運行可靠性[17]。
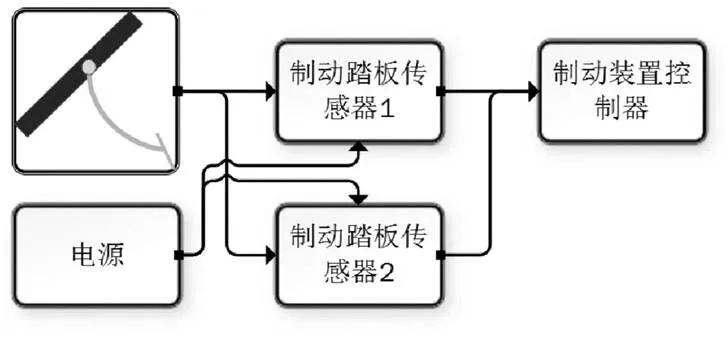
圖6 具有冗余設計的線控油門系統
容錯控制技術方法包括硬件冗余方法和解析冗余方法兩種[4]。硬件冗余是通過對功能進行備份,例如使用雙傳感器的線控油門系統,從而實現功能安全指標的提高,如圖6。冗余設計也是容錯控制的基礎,繼續沿用前面的舉例,具有雙傳感器的線控油門系統可以根據信號的差異,通過控制器診斷系統是否出現故障。而解析冗余方法主要是通過對控制器的軟件設計提高整個系統的功能冗余,從將整個系統的容錯性能進行提升。
3 結語
線控技術實現了高精度的電子控制,是實現高級輔助駕駛以及自動駕駛研發至關重要的基礎。因而如何使該技術性能更好是我們需要考慮的,同時如何在改進技術的同時提高其技術的可靠性也是非常重要的,特別是結合相關功能安全標準、穩定的硬軟件開發規范進行相應的開發,從而開發出具有市場競爭力的線控系統,為構建穩定的上層軟件系統奠定基石。
[1] 王政軍,李星,李源清,等.汽車線控技術的研究現狀及展望[J].科技創新導報,2015,12(21):8-9.
[2] 熊建,顧宏.發動機線控驅動技術的功能安全設計與研究[J].摩托車技術, 2019,No.333(11):36-43.
[3] 李華寧,陳小龍.汽車電子應用中的線控技術[J].蘇州市職業大學學報,2009,20(3):54-57.
[4] 于蕾艷,吳寶貴,伊劍波.汽車線控轉向系統轉向控制研究[J].江蘇大學學報(自然科學版),2014, 35(3):267-273.
[5] 曹洋,蒼衍.電動汽車底盤技術的顛覆式創新[J].汽車文摘,2019, No.527(12):13-19.
[6] 蔣鳴雷.新能源汽車制動系統的發展趨勢[J].汽車實用技術,2019, No.298(19):16-17, 42.
[7] 谷賀沖.乘用車電機直驅線控制動系統設計與控制研究[D].吉林大學,2019.
[8] 高智,鐘再敏,孫澤昌.電動AMT選換擋電機執行機構位置最優控制[J].汽車工程, 2011, 33(2): 133-137.
[9] 孫冬野,劉俊龍,葉明,等.機電控制CVT電控電動執行機構參數設計方法[J].中國公路學報, 2019, 32(1):182-190.
[10] 羅錦鋒.基于汽車智能化的高新技術研究[J].汽車實用技術,2019, No.296(17):163-165.
[11] 李俄收,吳文民,李玉英.未來42V汽車電氣系統綜述[J].汽車電器, 2004,卷缺失(4):4-7.
[12] 李理光.國際汽車電子技術發展新動態——42V汽車供電系統[J].汽車技術, 2001,卷缺失(2): 5-8.
[13] 佚名.符合ISO 26262國際汽車安全標準的EPS[J].汽車零部件, 2015, No.83(5):12.
[14] 蘆文峰.滿足ISO26262標準的EV整車控制單元開發研究[D].西華大學,2018.
[15] 郭輝,劉佳熙,于世濤,等.符合ISO 26262的汽車電子功能安全解決方案[J].上海汽車, 2015, No.295(3):47-50.
[16] 劉佳熙,郭輝,李君.汽車電子電氣系統的功能安全標準ISO26262 [J].上海汽車,2011, No.254(10):57-61.
[17] 羅來軍,李偉超,高大威,等.線控轉向系統軟硬件容錯研究綜述[J].汽車零部件, 2019, No.134(8):83-89.
Overview of Wire Control Subsystem and Integration of vehicle under the Background of Intelligent Network
Luo Ningyan
( Xihua University, Sichuan Chengdu 610039 )
Automatic control technology has been widely used in modern automobiles, the reliability of automotive electronic control technology is constantly improving, and the application of automotive wire control technology in automotive key systems is increasingly favored. The writing of this article is a preparation to study the wire control system of smart car and set the solid basic foundation for the autonomous system which based on the wire control chassis in the future. This article will introduce the necessities and definitions of the wire control system, and also give the main subsystems and key advances in this field. Finally, the main key problems in this field will be introduced.
Wire Control System; Acceleration-By-Wire; Braking-By-Wire; Shifting-By-Wire; Braking-By-Wire
10.16638/j.cnki.1671-7988.2021.04.005
U463.672
A
1671-7988(2021)04-14-04
U463.62
A
1671-7988(2021)04-14-04
羅寧延,就讀于西華大學。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
作文大王·低年級(2016年4期)2016-04-18 00:24:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
決策探索(2014年21期)2014-11-25 12:29:50
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55