基于Roadbox設(shè)備泊車VIL性能開發(fā)
2021-03-05 14:03:38姜家如劉君程宋紹文羅傳東李石王濤
汽車實(shí)用技術(shù) 2021年4期
姜家如,劉君程,宋紹文,羅傳東,李石,王濤
基于Roadbox設(shè)備泊車VIL性能開發(fā)
姜家如1,劉君程2,宋紹文1,羅傳東1,李石1,王濤1
(1.安徽江淮汽車集團(tuán)股份有限公司 技術(shù)中心,安徽 合肥 230601; 2.安徽江淮汽車集團(tuán)股份有限公司 國際公司,安徽 合肥 230601)
文章主要描述一種基于Roadbox設(shè)備搭建的自動泊車VIL測試平臺;采用虛擬車輛上配置的虛擬探頭探測場景中障礙物距離信息,通過Roadbox機(jī)箱中的超聲波仿真板卡將距離信息轉(zhuǎn)換成電平信號,再由超聲波換能器產(chǎn)生超聲波,進(jìn)而被真實(shí)傳感器探頭接收到,傳給實(shí)車上APA控制器,控制車輛運(yùn)動。真實(shí)車輛運(yùn)動情況由IMU通過CAN線傳給虛擬車輛,進(jìn)而驅(qū)動虛擬車輛隨著真實(shí)車輛的運(yùn)動,完成泊車過程。
VIL;Roadbox機(jī)柜;超聲波換能器;IMU;超聲波仿真板卡
引言
為了解決新手停車難的問題,開發(fā)出一款能夠代替真實(shí)駕駛員完成整個泊車過程的系統(tǒng)迫在眉睫[1-2]。為了確保APA控制器能否滿足項(xiàng)目要求,一般在項(xiàng)目開發(fā)前期需要對泊車控制器功能進(jìn)行測試驗(yàn)證,由于受到天氣、路面類型、停車位類型以及交通環(huán)境的限制[3],泊車VIL測試將完美地解決上述限制因素的影響。
1 VIL系統(tǒng)簡介
本系統(tǒng)提供一種基于Roadbox設(shè)備搭建的自動泊車VIL測試平臺;采用虛擬場景中虛擬車輛上配置的虛擬探頭探測虛擬場景中障礙物距離信息,通過Roadbox機(jī)箱中的超聲波仿真板卡將距離信息轉(zhuǎn)換成電平信號,再由超聲波換能器產(chǎn)生超聲波,進(jìn)而被真實(shí)傳感器探頭接收到,傳給實(shí)車上APA控制器,控制車輛運(yùn)動。真實(shí)車輛運(yùn)動情況由IMU通過CAN線傳給虛擬車輛,進(jìn)而驅(qū)動虛擬車輛隨著真實(shí)車輛的運(yùn)動在虛擬場景中完成泊車過程。

圖1 VIL測試方案
2 硬件介紹
VIL測試系統(tǒng)牽涉到的硬件主要由以下幾部分組成:
1)APA控制器;
2)超聲波換能器;
3)Roadbox機(jī)箱;
4)實(shí)車;
5)電源;
6)IMU。
3 虛擬模型搭建
3.1 超聲波模型搭建
由于整車VIL測試環(huán)節(jié),停車位是由虛擬探頭探測虛擬車位通過模擬傳遞給控制器,一般為了使虛擬探頭探測的距離更接近于真實(shí)探頭探測距離,需要通過優(yōu)化虛擬探頭探測角度來滿足設(shè)備要求[4-6]。
3.2 虛擬場景搭建
在此VIL測試過程,主要針對水平泊車功能進(jìn)行測試驗(yàn)證,我們采用最簡單的兩平行車位后面的停車位進(jìn)行,繪制泊車虛擬場景如下圖所示:
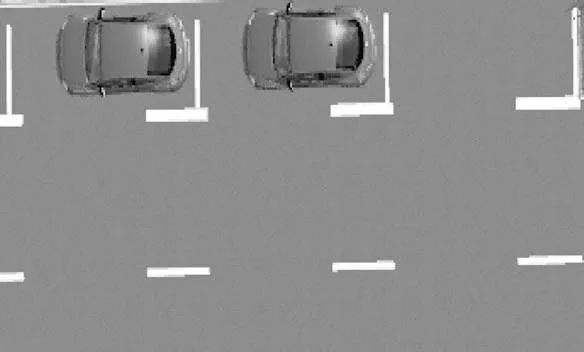
圖2 虛擬場景搭建
3.3 虛擬車輛搭建
VIL測試過程中所配置的車輛動力學(xué)模型為VIL模型,需要配置整車質(zhì)心坐標(biāo)、整車轉(zhuǎn)動慣量、輪胎參數(shù)以及后期測試動畫中整車外觀模型等。
4 IMU配置
IMU設(shè)備在VIL測試系統(tǒng)中的功能主要通過與固定基站通訊,實(shí)時采集真實(shí)車輛運(yùn)動軌跡的X、Y坐標(biāo)以及航向角,通過CAN線將此三個參數(shù)傳遞給上位機(jī)中虛擬車輛,進(jìn)而驅(qū)動虛擬車輛隨著真實(shí)車輛運(yùn)動。
5 水平泊車
實(shí)車掛D擋位,保持7km/h左右的速度直線前進(jìn),此時虛擬場景中的本車也開始按照實(shí)車軌跡前進(jìn)。然后打開APA開關(guān)激活半自動泊車功能,開始搜索車位。
虛擬場景中,虛擬車輛上配置的虛擬探頭在不斷搜索車位信息,當(dāng)經(jīng)過合適的車位時,虛擬探頭將探測到的距離信息傳給Roadbox機(jī)箱里面的超聲波仿真板卡,將距離信號轉(zhuǎn)換成電平信號,進(jìn)而由超聲波換能器產(chǎn)生回波,傳給超聲波換能器中真實(shí)超聲波探頭,真實(shí)探頭即將此模擬電平信號傳給控制器,進(jìn)而由控制器發(fā)出指令,在儀表盤上顯示提示找到車位并緩慢行駛,當(dāng)行駛到足夠的安全距離后,儀表會文字提示駕駛員“請停車”。駕駛員按照指示停車后,APA便接管方向盤泊車,泊車期間駕駛員需配合儀表盤提示完成換擋和踩踏板等操作。

圖3 尋找車位時間
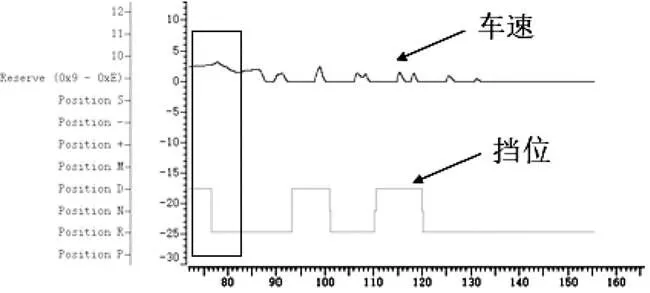
圖4 尋找車位速度
車位長度=尋找車位時間*尋找車位速度= 6.66米

圖5 真實(shí)與虛擬對比圖
而實(shí)際場景中設(shè)置的泊車車位寬度為6.4米,通過對比發(fā)現(xiàn),水平泊車時,ECU識別到的車位寬度與場景中設(shè)置的車位寬度基本一致。具體對比結(jié)果如圖5所示。
6 結(jié)論
本論文采用虛擬仿真技術(shù),讓實(shí)車測試過程不會因?yàn)闇y試場地的限制無法完成測試任務(wù);現(xiàn)在采用虛擬測試場景取代真實(shí)測試場景,能夠在一定程度上擺脫天氣、場地等因素的干擾。
[1] 周洪宇,王九靈,馮震,等.基于模擬技術(shù)的雷達(dá)測試環(huán)境構(gòu)建研究 [J].現(xiàn)代雷達(dá), 2014:36(9):79-82.
[2] 梁鐸耀,梁雅淇,武斌,等.汽車超聲波雷達(dá)輔助泊車系統(tǒng)開發(fā)[J].中國新技術(shù)新產(chǎn)品,2018(19):16-18.
[3] 馮廣增.基于激光雷達(dá)的智能汽車近程環(huán)境感知應(yīng)用研究[D].吉林大學(xué),2020.
[4] 賈程棟.面向城市智能汽車的場景多模真實(shí)感重建技術(shù)研究[D].電子科技大學(xué),2020.
[5] 曹愛君.汽車自動駕駛原理及關(guān)鍵技術(shù)分析[J].時代汽車,2020(03): 10-11.
[6] 朱冰,張培興,趙健,等.基于場景的自動駕駛汽車虛擬測試研究進(jìn)展[J].中國公路學(xué)報,2019,32(06):1-19.
VIL Performance Development Based on Roadbox Equipment Parking
Jiang Jiaru1, Liu Juncheng2, Song Shaowen1, Luo Chuandong1, Li Shi1, Wang Tao1
(1.Technology Center of Anhui Jianghuai Automobile Group Corp., Ltd, Anhui Hefei 230601;2.Anhui Jianghuai Automobile Group Corp., Ltd. International Company, Anhui Hefei 230601 )
This article mainly describes an automatic parking VIL test platform based on Roadbox equipment. Detect obstacle distance information in virtual scene by virtual probe of virtual vehicle in the virtual scene, and then convert the distance information to level signal by ultrasonic simulation board card in Roadbox, and then converted to the ultrasonic wave,which is generated by the ultrasonic transducer to be received by the real sensor probe, finally pass to the real car APA controller to control the vehicle movement. The real vehicle movement is transmitted by IMU to the virtual vehicle through CAN line, and then drives the virtual vehicle to complete the parking process in the virtual scene along with the movement of the real vehicle.
VIL; Roadbox equipment; Ultrasonic transducer; IMU; Ultrasonic simulation board card
10.16638/j.cnki.1671-7988.2021.04.004
TU 411.01
A
1671-7988(2021)04-11-03
TU 411.01
A
1671-7988(2021)04-11-03
姜家如(1988-),女,安徽省六安市人,哈爾濱工業(yè)大學(xué)學(xué)士學(xué)位,中級工程師,就職于安徽江淮汽車集團(tuán)股份有限公司技術(shù)中心。