民用飛機(jī)著陸系統(tǒng)安全性評估的故障樹分析
2021-03-05 06:35:14張輝陳世浩
航空工程進(jìn)展 2021年1期
張輝,陳世浩
(中電科柯林斯航空電子有限公司 工程部, 成都 611731)
0 引 言
飛機(jī)著陸系統(tǒng)能夠向飛行員提供精密引導(dǎo)信息,保障飛機(jī)安全進(jìn)近和著陸。一旦著陸引導(dǎo)信息丟失,尤其是在氣象條件惡劣和能見度差的條件下,將大幅增加飛行員的工作負(fù)擔(dān),影響飛機(jī)的飛行安全。據(jù)統(tǒng)計(jì),飛機(jī)的飛行事故大約有一半發(fā)生在進(jìn)近著陸階段,因此,研究飛機(jī)著陸系統(tǒng)的安全性設(shè)計(jì)對飛行安全具有重要意義。
儀表著陸系統(tǒng)(Instrument Landing System,簡稱ILS)是國際民航組織認(rèn)可的標(biāo)準(zhǔn)著陸設(shè)備,過去幾十年來在飛機(jī)進(jìn)場著陸中發(fā)揮了很大的作用。相比于ILS,微波著陸系統(tǒng)(Microwave Landing System,簡稱MLS)具有抗干擾能力強(qiáng)、工作波道多、能達(dá)到Ⅲ類精密進(jìn)場著陸等優(yōu)點(diǎn),但由于種種限制,如MLS地面設(shè)備昂貴、ILS已遍布全球等,目前只有少數(shù)機(jī)場使用了MLS。2007年11月,空客A320系列飛機(jī)獲得歐洲航空安全局批準(zhǔn)采用MLS進(jìn)行Ⅲ類b盲降。新一代著陸系統(tǒng)是基于GBAS(Ground-Based Augmentation Systems)的衛(wèi)星著陸系統(tǒng)(GBAS Landing System,簡稱GLS),它通過機(jī)載設(shè)備接收衛(wèi)星信號(hào)來確定飛機(jī)的大致位置,同時(shí)接收地面設(shè)備廣播的誤差信息,對該位置進(jìn)行校正,得到飛機(jī)更精確的位置,從而支持GLS著陸。目前,美國及歐洲部分國家的一些機(jī)場已實(shí)施 GLS I類運(yùn)行,Ⅱ、Ⅲ類運(yùn)行正在發(fā)展和取證中。中國民航于2015年4月在上海浦東機(jī)場完成了國內(nèi)首次GLS 演示驗(yàn)證飛行。鑒于中國正在發(fā)展可覆蓋全球的北斗衛(wèi)星定位導(dǎo)航系統(tǒng),基于北斗系統(tǒng)的GLS系統(tǒng)是未來的發(fā)展方向。
安全性分析作為民用飛機(jī)研制過程中必不可少的一部分,貫穿整個(gè)研制周期。而安全性分析過程和研制過程又是緊密結(jié)合的,二者的關(guān)系遵循ARP4754A中提出的“雙V”過程。安全性評估的結(jié)果能對系統(tǒng)架構(gòu)提出改進(jìn)措施,直到系統(tǒng)設(shè)計(jì)滿足適航安全性要求。
在系統(tǒng)安全性分析中,故障樹分析方法作為安全性概率分析方法之一,在工程中應(yīng)用廣泛。例如,王棟將動(dòng)態(tài)故障樹分析方法應(yīng)用于輔助動(dòng)力裝置APU(Auxiliary Power Unit)系統(tǒng)的分析中,可以呈現(xiàn)冗余系統(tǒng)的動(dòng)態(tài)特性;王小輝等應(yīng)用故障樹分析方法,對結(jié)冰探測系統(tǒng)中喪失結(jié)冰探測告警與指示功能故障進(jìn)行分析,為結(jié)冰探測系統(tǒng)的設(shè)計(jì)提供了參考;陸崢等通過構(gòu)建故障樹模型,對蓄意墜機(jī)中飛機(jī)駕駛艙遭遇非法控制的頂事件做了分析,找出飛機(jī)遭遇非法控制的薄弱環(huán)節(jié),提出了一種改進(jìn)的駕駛艙門控制流程和邏輯;閆鋒等將故障樹分析方法和蒙特卡羅方法相結(jié)合,分析了航空發(fā)動(dòng)機(jī)控制系統(tǒng)故障導(dǎo)致的發(fā)動(dòng)機(jī)喪失推力控制的失效狀態(tài),為航空發(fā)動(dòng)機(jī)控制系統(tǒng)的適航審定提供了一種方法;張艷慧等運(yùn)用系統(tǒng)安全性評估方法對某型號(hào)反推力系統(tǒng)的設(shè)計(jì)方案進(jìn)行分析,構(gòu)建了反推力裝置空中意外打開的故障樹,提出了系統(tǒng)架構(gòu)的更改建議,為其他型號(hào)反推力系統(tǒng)的設(shè)計(jì)提供了借鑒;徐文華等、劉宇等提出了一種故障樹自動(dòng)建模方法,能夠提高安全性分析的效率和完備性,但安全性分析模型的建立較為復(fù)雜,同時(shí)由于傳統(tǒng)的故障樹手動(dòng)建模方法在工程中已廣泛應(yīng)用,要完全替代故障樹手動(dòng)建模方法仍存在困難。目前的研究主要集中于上述文獻(xiàn)提到的各個(gè)系統(tǒng),對飛機(jī)著陸系統(tǒng)的安全性分析,并未做更詳細(xì)的研究。
本文以微波著陸系統(tǒng)為例,采用一種“緊湊”的故障樹建模方法,對故障樹的建模過程、概率的計(jì)算以及當(dāng)安全性需求無法滿足時(shí),如何優(yōu)化系統(tǒng)架構(gòu)等方面展開研究,為飛機(jī)著陸系統(tǒng)的安全性分析和系統(tǒng)設(shè)計(jì)提供參考。另外,故障樹分析方法是以微波著陸系統(tǒng)為載體展開,該方法的建模思路對飛機(jī)其他著陸系統(tǒng)(如ILS系統(tǒng)、GLS系統(tǒng)等)也是適用的。
1 安全性評估過程
安全性評估的基本流程如圖1所示。

圖1 安全性評估過程[13]
安全性評估過程主要包括飛機(jī)級(jí)功能危險(xiǎn)性評估(Aircraft Functional Hazard Assessment,簡稱AFHA)、系統(tǒng)級(jí)功能危險(xiǎn)性評估(System Functional Hazard Assessment,簡稱SFHA)、初步系統(tǒng)安全性評估(Preliminary System Safety Assessment,簡稱PSSA)和系統(tǒng)安全性評估(System Safety Assessment,簡稱SSA)。
AFHA通過系統(tǒng)地分析飛機(jī)級(jí)的功能,識(shí)別和飛機(jī)級(jí)功能相關(guān)的失效狀態(tài),并根據(jù)失效影響的嚴(yán)重程度對其分類。AFHA的分析結(jié)果會(huì)通過初步飛機(jī)安全性評估(Preliminary Aircraft Safety Assessment,簡稱PASA),將各個(gè)功能的安全性需求分配到系統(tǒng)。各系統(tǒng)根據(jù)分配結(jié)果,進(jìn)一步做SFHA,識(shí)別和系統(tǒng)級(jí)功能相關(guān)的失效狀態(tài)和影響等級(jí)。失效狀態(tài)的影響等級(jí)包括災(zāi)難性的、危險(xiǎn)性的、重大的、輕微的和無安全影響的五大類,對應(yīng)的概率要求分別為 1.00×10、1.00×10、1.00×10、1.00×10和無概率要求。SFHA的分析結(jié)果輸出給PSSA,PSSA通過對提出的系統(tǒng)架構(gòu)進(jìn)行系統(tǒng)性地檢查,以確定系統(tǒng)故障如何導(dǎo)致SFHA識(shí)別的功能危險(xiǎn),以及怎樣滿足SFHA中識(shí)別的安全性需求。SSA通過對已實(shí)現(xiàn)的系統(tǒng)設(shè)計(jì)做系統(tǒng)性地分析,綜合各種分析結(jié)果,以確定系統(tǒng)實(shí)現(xiàn)能滿足相關(guān)的安全性需求。
2 故障樹分析
故障樹分析(Fault Tree Analysis,簡稱FTA)是一種自頂向下的分析方法,作為最常用的安全性概率計(jì)算分析方法,故障樹分析廣泛應(yīng)用于PSSA和SSA中,用于評估系統(tǒng)架構(gòu)是否能滿足系統(tǒng)危險(xiǎn)性評估中定義的失效狀態(tài)對應(yīng)的概率要求。
2.1 概率值計(jì)算
電子設(shè)備通常具有隨機(jī)的故障分布,可用指數(shù)分布建模,如式(1)所示。
P
=1-e
-≈λ
τ
(1)
式中:P
為電子設(shè)備發(fā)生故障的概率;λ
為失效率;τ
為暴露時(shí)間或稱為處于風(fēng)險(xiǎn)的時(shí)間。基本事件對應(yīng)的失效率λ
取值可來源于可靠性預(yù)測、失效狀態(tài)與影響分析(Failure Mode and Effect Analysis,簡稱FMEA)等。2.2 割 集
割集是導(dǎo)致故障樹頂事件發(fā)生的任何基本事件或者基本事件的組合。割集分析作為故障樹分析的重要組成部分,通過對基本事件或基本事件組合的檢查,能夠發(fā)現(xiàn)故障樹結(jié)構(gòu)中存在的潛在邏輯錯(cuò)誤,同時(shí)能根據(jù)對頂事件發(fā)生概率的貢獻(xiàn)程度,對割集的組合排序。
3 微波著陸系統(tǒng)
微波著陸系統(tǒng)(MLS)是一種全天候精密進(jìn)近著陸系統(tǒng),工作頻率為5 031.0~5 090.7 MHz,共200個(gè)波道,依時(shí)間基準(zhǔn)波束掃描原理工作,由地面設(shè)備和機(jī)載設(shè)備組成。地面設(shè)備向空中輻射一個(gè)很窄的扇形波束,在相應(yīng)的覆蓋區(qū)內(nèi)往返掃描(覆蓋范圍通常為方位角-40°~40°,仰角0.9°~15°),對方位而言,在水平方向上左右往返掃描,對仰角而言,在垂直方向上上下往返掃描。方位波束左右往返掃描的情況如圖2所示。

圖2 微波著陸系統(tǒng)角測量原理
假設(shè)飛機(jī)處于微波著陸系統(tǒng)的覆蓋區(qū),當(dāng)方位波束相對于跑道中心線從左往右往掃描碰到飛機(jī)時(shí),機(jī)載設(shè)備收到一個(gè)往掃脈沖,當(dāng)波束從右向左返掃描碰到飛機(jī)時(shí),機(jī)載設(shè)備收到一個(gè)返掃脈沖。由于波束的掃描速率是已知的,通過測量往掃脈沖和返掃脈沖之間的時(shí)間間隔,就能得到飛機(jī)相對于跑道中心線的方位角。俯仰角的測量原理和方位角類似,區(qū)別僅在于仰角波束是上下往返掃描的。測量出方位角和俯仰角后,就得到了飛機(jī)相對于跑道中心線的方位偏差和相對于下滑道的俯仰偏差,從而為飛機(jī)提供著陸引導(dǎo)信息。
4 針對微波著陸系統(tǒng)的故障樹分析
4.1 微波著陸功能的失效狀態(tài)
假設(shè)系統(tǒng)功能危險(xiǎn)性評估(SFHA)中識(shí)別出的關(guān)于微波著陸功能的失效狀態(tài)如表1所示,表中列出了失效狀態(tài)及其編號(hào)、適用的飛行階段、失效影響、等級(jí)分類和概率要求。當(dāng)影響等級(jí)為重大時(shí),對應(yīng)的概率要求為1.00×10。

表1 微波著陸系統(tǒng)功能危險(xiǎn)性評估表
4.2 微波著陸系統(tǒng)框圖
假設(shè)微波著陸系統(tǒng)的概念框圖如圖3所示。

圖3 微波著陸系統(tǒng)概念框圖
微波著陸系統(tǒng)由兩套微波著陸子系統(tǒng)構(gòu)成,包括兩個(gè)微波著陸單元(Microwave Landing System Unit,簡稱MLSU)和一個(gè)雙路輸出的MLS天線。MLSU接收來自MLS天線的射頻信號(hào),同時(shí)通過A總線接收來自狀態(tài)控制單元(Status Control Unit,簡稱SCU)經(jīng)接口控制單元(Interface Control Unit,簡稱ICU)轉(zhuǎn)發(fā)的波道信息,調(diào)諧到對應(yīng)的工作頻點(diǎn),將射頻信號(hào)解調(diào)后,計(jì)算出方位偏差和俯仰偏差。方位偏差和俯仰偏差數(shù)據(jù)經(jīng)A總線發(fā)送至接口控制單元,再由接口控制單元路由至B總線網(wǎng)絡(luò),最終送至顯示器顯示。
供電方面,采用電源匯流條#1為左側(cè)的MLSU、左側(cè)的ICU以及主駕駛顯示器(Pilot Display)供電;電源匯流條#2為右側(cè)的MLSU、右側(cè)的ICU以及副駕駛顯示器(Copilot Display)供電;電源匯流條#3為SCU供電。
4.3 完全喪失兩側(cè)微波著陸信息的故障樹分析
4.3.1 故障樹建模方法
常規(guī)的故障樹建模方法在構(gòu)建故障樹時(shí),較容易忽略一些中間事件,過快地從頂事件分解到底事件。在系統(tǒng)架構(gòu)不復(fù)雜的情況下,該方法構(gòu)建的故障樹可信度仍較高,但針對復(fù)雜的系統(tǒng)設(shè)計(jì),往往會(huì)出現(xiàn)分析的遺漏或不完備。
本文在構(gòu)建完全喪失兩側(cè)微波著陸信息為頂事件的故障樹時(shí),采用一種“緊湊”的故障樹建模方法,如圖4所示。

圖4 故障樹建模方法概念框圖
假設(shè)某數(shù)據(jù)經(jīng)單元B傳送至單元C,故障樹分析的起點(diǎn)是單元C無數(shù)據(jù)輸出,該事件可分解為丟失單元C或丟失單元C的輸入。丟失單元C的輸入又可進(jìn)一步分解為丟失單元B到單元C的連接或單元B無數(shù)據(jù)輸出。單元B無數(shù)據(jù)輸出又回到故障樹分析的起點(diǎn),可按同樣的方法進(jìn)行分解,直到找出最底層的基本事件。
如果將單元B和單元C組成的框圖看作一個(gè)最小單元,那么復(fù)雜的系統(tǒng)架構(gòu)可看作是由多個(gè)這樣的最小單元串聯(lián)和并聯(lián)而成,通過循環(huán)使用該建模方法,就能層層遞進(jìn)地完成故障樹的分解。
4.3.2 故障樹分析過程
針對完全喪失兩側(cè)的微波著陸信息(34-F37-01)的失效狀態(tài),其詳細(xì)的故障樹分析過程如圖5~圖10所示。該分析假設(shè)主駕駛顯示器僅從左側(cè)微波著陸單元接收微波著陸方位和俯仰偏差數(shù)據(jù),副駕駛顯示器僅從右側(cè)微波著陸單元接收微波著陸方位和俯仰偏差數(shù)據(jù)。整個(gè)故障樹由兩個(gè)子故障樹組成,包括完全喪失主駕駛顯示器的微波著陸信息(G10)和完全喪失副駕駛顯示器的微波著陸信息(G7)。G10對應(yīng)的故障樹由第1頁~第6頁構(gòu)成,G7對應(yīng)的故障樹由第7頁~第12頁構(gòu)成。由于G7和G10完全相似,區(qū)別僅在于一個(gè)是右側(cè),一個(gè)是左側(cè),出于簡潔性和篇幅的考慮,并未列舉第7頁~第12頁的內(nèi)容。

圖5 完全喪失兩側(cè)MLS信息(第1頁)
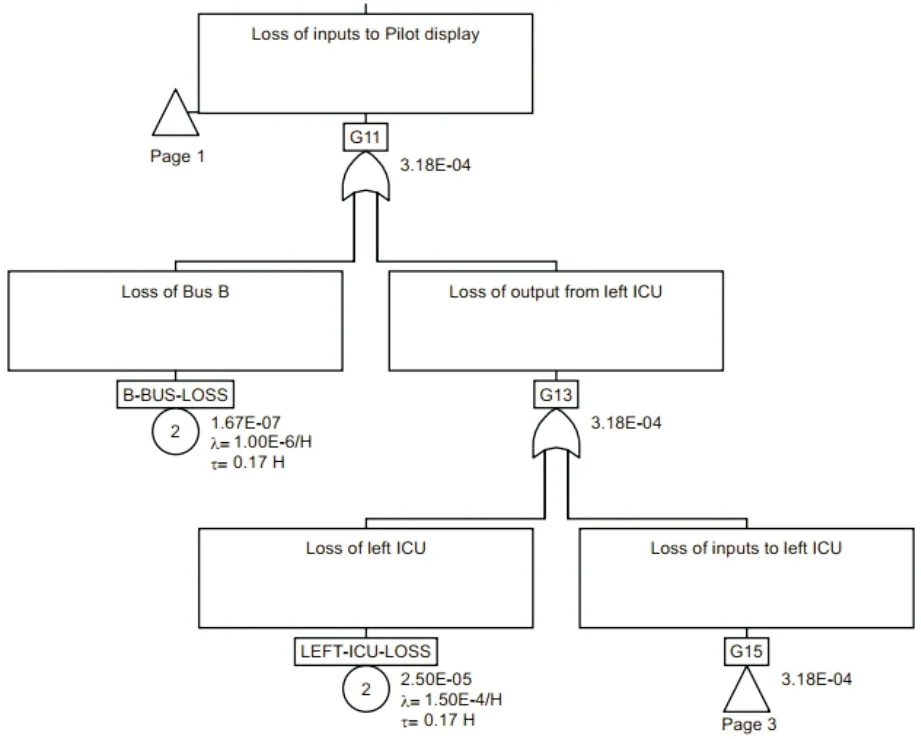
圖6 完全喪失兩側(cè)MLS信息(第2頁)

圖7 完全喪失兩側(cè)MLS信息(第3頁)

圖8 完全喪失兩側(cè)MLS信息(第4頁)

圖9 完全喪失兩側(cè)MLS信息(第5頁)

圖10 完全喪失兩側(cè)MLS信息(第6頁)
針對完全喪失主駕駛顯示器的微波著陸信息的頂事件,導(dǎo)致其發(fā)生的原因主要包括:喪失主駕駛顯示器、喪失輸入路徑(如總線A、總線B和射頻線)、喪失狀態(tài)控制單元、喪失左側(cè)接口控制單元、喪失左側(cè)微波著陸單元、喪失微波著陸天線以及喪失飛機(jī)電源。
故障樹中底事件符號(hào)圈內(nèi)的數(shù)字代表該底事件在整個(gè)故障樹中出現(xiàn)的次數(shù)。如果底事件僅發(fā)生了1次,則符號(hào)圈內(nèi)默認(rèn)顯示空白。如果底事件發(fā)生的次數(shù)大于1次,則符號(hào)圈里將顯示對應(yīng)的數(shù)字。例如,LEFT-ICU-LOSS在故障樹第2頁和第5頁各出現(xiàn)1次,則符號(hào)圈內(nèi)顯示“2”。B-BUS-LOSS在第2頁和第8頁各出現(xiàn)1次(故障樹第8頁并未在文中列舉),則符號(hào)圈內(nèi)顯示“2”。
由于微波著陸功能應(yīng)用于飛機(jī)的進(jìn)近著陸階段,假設(shè)進(jìn)近著陸的時(shí)間為10 min,則暴露時(shí)間約等于0.17 h。整個(gè)故障樹分析過程中,涉及的所有基本事件對應(yīng)的失效率如表2所示。

表2 失效率信息匯總
在整個(gè)故障樹中,由于有基本事件出現(xiàn)的次數(shù)不止1次,在計(jì)算頂事件的發(fā)生概率時(shí),故障樹分析工具會(huì)先做布爾代數(shù)化簡,再根據(jù)化簡后的邏輯關(guān)系做概率計(jì)算,以保證概率值的真實(shí)性。基于表2所假設(shè)的失效率,經(jīng)故障樹分析工具計(jì)算后,結(jié)果表明,完全喪失兩側(cè)微波著陸信息的發(fā)生概率為9.24×10,不能滿足1.00×10的概率要求。
4.3.3 割集報(bào)告
割集報(bào)告列舉了所有割集對應(yīng)的基本事件或基本事件的組合、發(fā)生概率以及該概率占頂事件發(fā)生概率的百分比,并按照概率重要度對割集按從大到小排序。
當(dāng)34-F37-01發(fā)生概率為9.24×10時(shí),對應(yīng)的割集報(bào)告如表3所示,表中列舉了對頂事件發(fā)生概率貢獻(xiàn)最大的前5個(gè)割集組合、對應(yīng)的概率值和所占的百分比,可以看出:電源匯流條#3故障、微波著陸天線故障、狀態(tài)監(jiān)控單元故障和總線B故障均是單點(diǎn)事件,任何一個(gè)事件發(fā)生都能導(dǎo)致完全喪失兩側(cè)的微波著陸信息。電源匯流條#3故障作為最大貢獻(xiàn)者,發(fā)生的概率為8.35×10,占頂事件發(fā)生概率的90.3%;微波著陸天線故障作為第二貢獻(xiàn)者,發(fā)生的概率為6.68×10,僅占頂事件發(fā)生概率的7.3%。表明為了讓頂事件的發(fā)生概率滿足1.00×10的要求,需要圍繞最大貢獻(xiàn)者——喪失電源匯流條#3做進(jìn)一步改進(jìn)。

表3 割集報(bào)告(34-F37-01=9.24×10-5)
4.4 改進(jìn)措施
為了滿足1.00×10的概率要求,圍繞電源匯流條#3有兩種改進(jìn)措施。
4.4.1 措施一
最簡單且代價(jià)最小的措施是考慮能否進(jìn)一步降低電源匯流條#3的失效率或者找到另一種失效率更低的電源匯流條替代電源匯流條#3。假設(shè)電源匯流條#3的失效率可從5.00×10降低到1.00×10,代入故障樹計(jì)算出頂事件發(fā)生的概率為1.06×10。由于1.06×10和1.00×10非常接近,可認(rèn)為已滿足1.00×10的概率要求。
當(dāng)34-F37-01發(fā)生概率為1.06×10時(shí),對應(yīng)的割集報(bào)告如表4所示,可以看出:當(dāng)電源匯流條#3的失效率降低至1.00×10后,最大貢獻(xiàn)者已不再是電源匯流條#3故障,而轉(zhuǎn)換成微波著陸天線故障。若需進(jìn)一步降低頂事件發(fā)生概率,可圍繞微波著陸天線采取改進(jìn)措施,如將當(dāng)前微波著陸天線替換為兩個(gè)單路輸出的微波著陸天線,但成本也會(huì)相應(yīng)地增加。

表4 割集報(bào)告(34-F37-01=1.06×10-5)
4.4.2 措施二
假設(shè)電源匯流條#3的失效率無法降低,另一種可能的改進(jìn)措施是增加一路應(yīng)急匯流條對狀態(tài)控制單元供電,同時(shí)引入一個(gè)電源監(jiān)視控制單元(Power Monitor Control Unit,簡稱PMCU),優(yōu)化后的狀態(tài)控制單元供電框圖如圖11所示。PMCU具有電壓監(jiān)視和電壓切換的功能,系統(tǒng)上電后,PMCU默認(rèn)選擇接通電源匯流條#3為狀態(tài)控制單元供電,一旦監(jiān)視到電源匯流條#3的電壓喪失時(shí),PMCU會(huì)選擇接通應(yīng)急匯流條#4為狀態(tài)控制單元供電,從而提高供電的可靠性。

圖11 狀態(tài)控制單元供電框圖(優(yōu)化后)
供電優(yōu)化后,完全喪失對SCU供電的子故障樹如圖12所示,包括電源匯流條#3故障同時(shí)PMCU無法接通應(yīng)急匯流條#4,以及電源匯流條#3和應(yīng)急匯流條#4同時(shí)故障。

圖12 完全喪失SCU電源的子故障樹(優(yōu)化后)
假設(shè)PMCU的失效率為1.00×10、電源匯流條#3和應(yīng)急匯流條#4的失效率仍為5.00×10,計(jì)算出喪失SCU電源的概率為2.09×10。將圖12所示的子故障樹代入整個(gè)故障樹中,計(jì)算出完全喪失兩側(cè)MLS信息的發(fā)生概率為8.94×10,滿足1.00×10的概率要求。
4.4.3 結(jié)果對比
原始方案及加入兩種改進(jìn)措施方案的結(jié)果對比如表5所示,概率要求值為1.00×10。

表5 三種不同方案結(jié)果對比
5 結(jié) 論
(1) “緊湊”的故障樹建模方法對故障樹層與層之間的關(guān)系銜接更加緊密,能更好地保證故障樹構(gòu)建過程的邏輯性和完整性。針對復(fù)雜的系統(tǒng)架構(gòu),只需循環(huán)使用該方法,即可完成復(fù)雜故障樹的構(gòu)建。該建模方法還能在一定程度上保證不同安全性分析人員構(gòu)建的故障樹具有相似的結(jié)構(gòu),便于適航當(dāng)局開展評審工作。
(2) 當(dāng)安全性概率要求無法滿足時(shí),故障樹分析可根據(jù)割集報(bào)告找出對頂事件發(fā)生概率的最大貢獻(xiàn)者,為系統(tǒng)架構(gòu)的優(yōu)化指明方向。
(3) 當(dāng)安全性概率要求無法滿足時(shí),可從兩方面采取改進(jìn)措施,一是考慮能否進(jìn)一步降低最大貢獻(xiàn)者的失效率,二是考慮如何圍繞最大貢獻(xiàn)者增加冗余度設(shè)計(jì),從而滿足安全性概率要求。
猜你喜歡
現(xiàn)代儀器與醫(yī)療(2022年2期)2022-08-11 09:51:40
汽車工程師(2021年12期)2022-01-18 06:02:43
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39