露天礦無人駕駛自卸卡車發(fā)展綜述
2021-03-04 05:52:18李慶玲張慧祥趙旭陽許茂洲
煤炭工程 2021年2期
李慶玲,張慧祥,趙旭陽,許茂洲
(中國礦業(yè)大學(xué)(北京) 機(jī)電與信息工程學(xué)院,北京 100083)
露天開采作為礦產(chǎn)資源開發(fā)的主要方式,在煤炭開采中發(fā)揮著重要作用,其具有生產(chǎn)規(guī)模大、效率高、成本低、資源采出率高等優(yōu)勢,成為世界主要產(chǎn)煤大國的首選開采方式[1]。但露天礦常位于偏遠(yuǎn)地區(qū),環(huán)境惡劣,信息化程度差[2],存在以下問題:①運(yùn)載設(shè)備需經(jīng)驗(yàn)豐富的駕駛員操作,高級(jí)作業(yè)人員招聘難,流動(dòng)性大;②人員工資成本高、人工運(yùn)輸油耗大、設(shè)備易損維護(hù)困難;③車輛間協(xié)調(diào)性差,難以統(tǒng)一管理和精準(zhǔn)控制;④司機(jī)長時(shí)間高強(qiáng)度工作易出現(xiàn)疲勞駕駛導(dǎo)致安全事故[3]。因此,采用無人駕駛運(yùn)輸對降低開采成本,提高運(yùn)輸效率,減少事故發(fā)生具有重要的現(xiàn)實(shí)意義。
近年來,無人駕駛發(fā)展迅猛,但開放道路無人駕駛步入瓶頸,主要面臨問題如下:①道路場景復(fù)雜多變,高精度地圖構(gòu)建更新困難,感知、定位等關(guān)鍵技術(shù)魯棒性不能保證;②系統(tǒng)依賴的傳感器對精度要求高、價(jià)格高使其難以產(chǎn)業(yè)化;③對無人駕駛產(chǎn)生的事故責(zé)任劃分不明確,需進(jìn)一步完善相關(guān)法律法規(guī);④無人駕駛系統(tǒng)的測試缺少統(tǒng)一標(biāo)準(zhǔn)或方法[4]。這導(dǎo)致無人駕駛在開放道路短時(shí)間內(nèi)難以普及。但露天礦具有道路場景單一、車輛運(yùn)行線路固定、低速、交通參與者組成簡單、交通規(guī)則可自制等優(yōu)勢,是無人駕駛最佳落地場景之一。國家煤礦安全監(jiān)察局公告2019年第1號(hào)文件《煤礦機(jī)器人重要研發(fā)目錄》將“露天礦卡無人駕駛系統(tǒng)”列為重點(diǎn)研發(fā)項(xiàng)目。因此,以智能化、數(shù)字化[5]、網(wǎng)聯(lián)化為核心的現(xiàn)代礦山裝備無人駕駛技術(shù)是智慧礦山[6]建設(shè)的重要發(fā)展方向。
1 場景描述與無人礦卡功能要求
1.1 露天礦場景描述
露天開采是將覆蓋在礦體上部及周圍的浮土和圍巖剝?nèi)ィ瑥某兜牡V體上采掘礦石。公路開拓常作為露天礦開拓方式的組成部分,其特點(diǎn)見表1,可以看出,公路開拓優(yōu)缺點(diǎn)互現(xiàn)。發(fā)展公路開拓?zé)o人駕駛的優(yōu)勢可從四個(gè)方面概括:①環(huán)境開闊,GPS信號(hào)全覆蓋,定位可靠性高;②人員位置固定可控,運(yùn)輸設(shè)備移動(dòng)速度低,生產(chǎn)過程相對封閉,交通規(guī)則可自制,環(huán)境感知數(shù)據(jù)更易解析;③道路場景單一,運(yùn)輸路線固定,點(diǎn)對點(diǎn)運(yùn)輸技術(shù)難度小;④測試場地易選,測試安全隱患少。
在露天礦開采中,礦山運(yùn)輸?shù)幕ㄍ顿Y占礦山基建投資額的60%左右,運(yùn)輸成本和勞動(dòng)量分別占礦山總成本和總勞動(dòng)量的50%以上[7]。根據(jù)采礦設(shè)備行業(yè)統(tǒng)計(jì)公司Parker Bay的數(shù)據(jù),礦山無人駕駛的應(yīng)用可以在運(yùn)載裝備、人員、油料、輪胎磨損等方面節(jié)約大量成本、降低污染物排放量。另外,隨著人工智能的發(fā)展,露天礦無人駕駛自卸卡車(以下簡稱無人礦卡)及其系統(tǒng)建設(shè)已具備技術(shù)可行性。
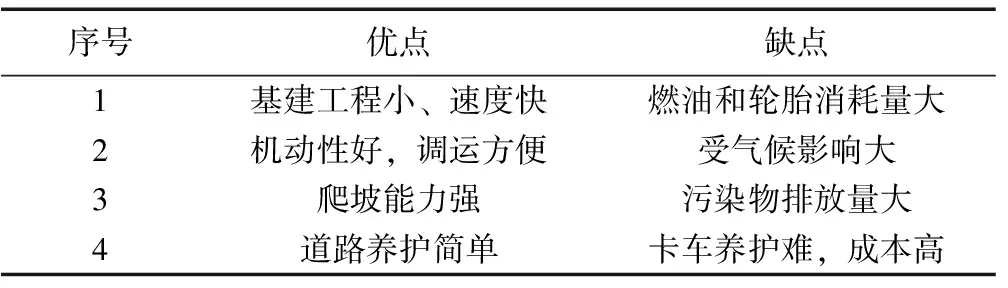
表1 公路開拓運(yùn)輸?shù)奶攸c(diǎn)
1.2 無人礦卡功能要求
對于車輛智能化分級(jí),常采用國際汽車工程師協(xié)會(huì)(Society of Automotive Engineers)制定的標(biāo)準(zhǔn),又稱SAE標(biāo)準(zhǔn),相關(guān)概述見表2。

表2 SAE自動(dòng)駕駛分級(jí)表
由表2可知,自動(dòng)駕駛的發(fā)展是從輔助駕駛到全自動(dòng)駕駛,從應(yīng)對簡單場景到可掌控所有場景的升級(jí)過程。Level 3級(jí)可以在特定條件下實(shí)現(xiàn)自動(dòng)駕駛,Level 4及以上級(jí)別無需人為干預(yù),可實(shí)現(xiàn)完全無人駕駛。因此,露天礦無人駕駛自卸卡車的需求及場景完全符合Level 4級(jí)別的概念定義和功能界定。
2 無人礦卡發(fā)展現(xiàn)狀
2.1 國外發(fā)展現(xiàn)狀
礦山無人駕駛卡車的研究始于20世紀(jì)70年代,日本、美國等國家的研究機(jī)構(gòu)和企業(yè)取得了一些成果。
2.1.1 日本小松(KOMATSU)
日本小松公司20世紀(jì)80年代開始研究礦山運(yùn)載設(shè)備的無人駕駛技術(shù)。1996年,小松無人駕駛卡車在澳大利亞投入運(yùn)行,以激光校準(zhǔn)制導(dǎo)和全球定位系統(tǒng)(GPS)引導(dǎo)卡車。2005年,在現(xiàn)有車型上改裝,改裝車如圖1(a),并通過綜合性礦山車隊(duì)自動(dòng)化管理系統(tǒng)AHS(名為FrontRunner)將自動(dòng)化卡車、推土機(jī)、裝載機(jī)和鏟車實(shí)現(xiàn)智能化配合,整個(gè)系統(tǒng)可在地面控制中心、通信基站、導(dǎo)航衛(wèi)星等設(shè)備的支持下持續(xù)工作。2016年,小松發(fā)布取消司機(jī)駕駛室的礦用無人駕駛卡車,如圖1(b)所示。2017年底,小松的無人駕駛卡車總數(shù)超過100臺(tái),累計(jì)運(yùn)輸超過10億t物料。此外,小松發(fā)展無人駕駛系統(tǒng)在混合型車隊(duì)的應(yīng)用能力,即一個(gè)車隊(duì)中同時(shí)運(yùn)行有人駕駛和無人駕駛,以實(shí)現(xiàn)現(xiàn)有礦山向全面無人駕駛過渡。
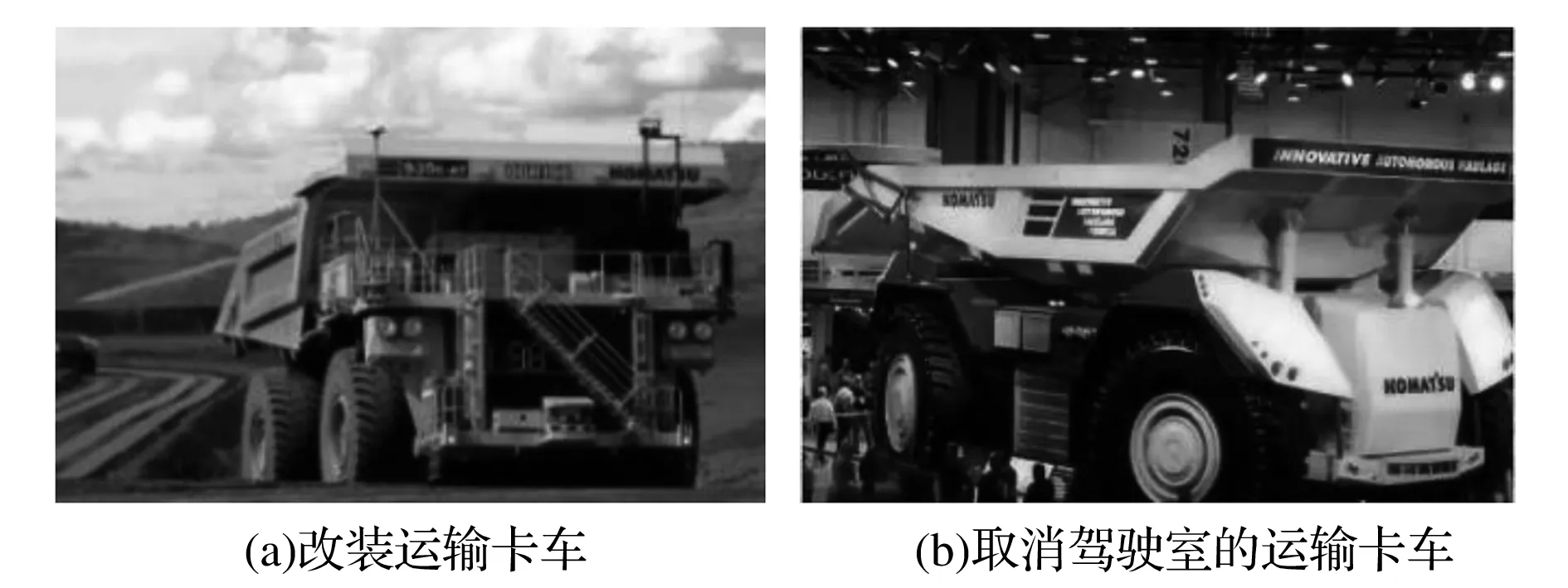
圖1 小松公司無人礦卡
AHS工作系統(tǒng)如圖2所示,每臺(tái)卡車都安裝一套車輛控制器、高精度GPS、障礙物檢測系統(tǒng)和無線網(wǎng)絡(luò)系統(tǒng),由裝備了高精度定位GPS系統(tǒng)的車隊(duì)檢測中心管理。系統(tǒng)運(yùn)行過程中,檢測中心為每輛車制定目的地,車輛通過無線傳輸接收指令并按目標(biāo)路線運(yùn)行,卡車由GPS、控制中心無線指令和其他引導(dǎo)裝置來確定車輛在礦山的準(zhǔn)確坐標(biāo)及周圍環(huán)境情況,自卸車在無人操作的情況下實(shí)現(xiàn)裝載、運(yùn)輸和卸載的自動(dòng)運(yùn)行。
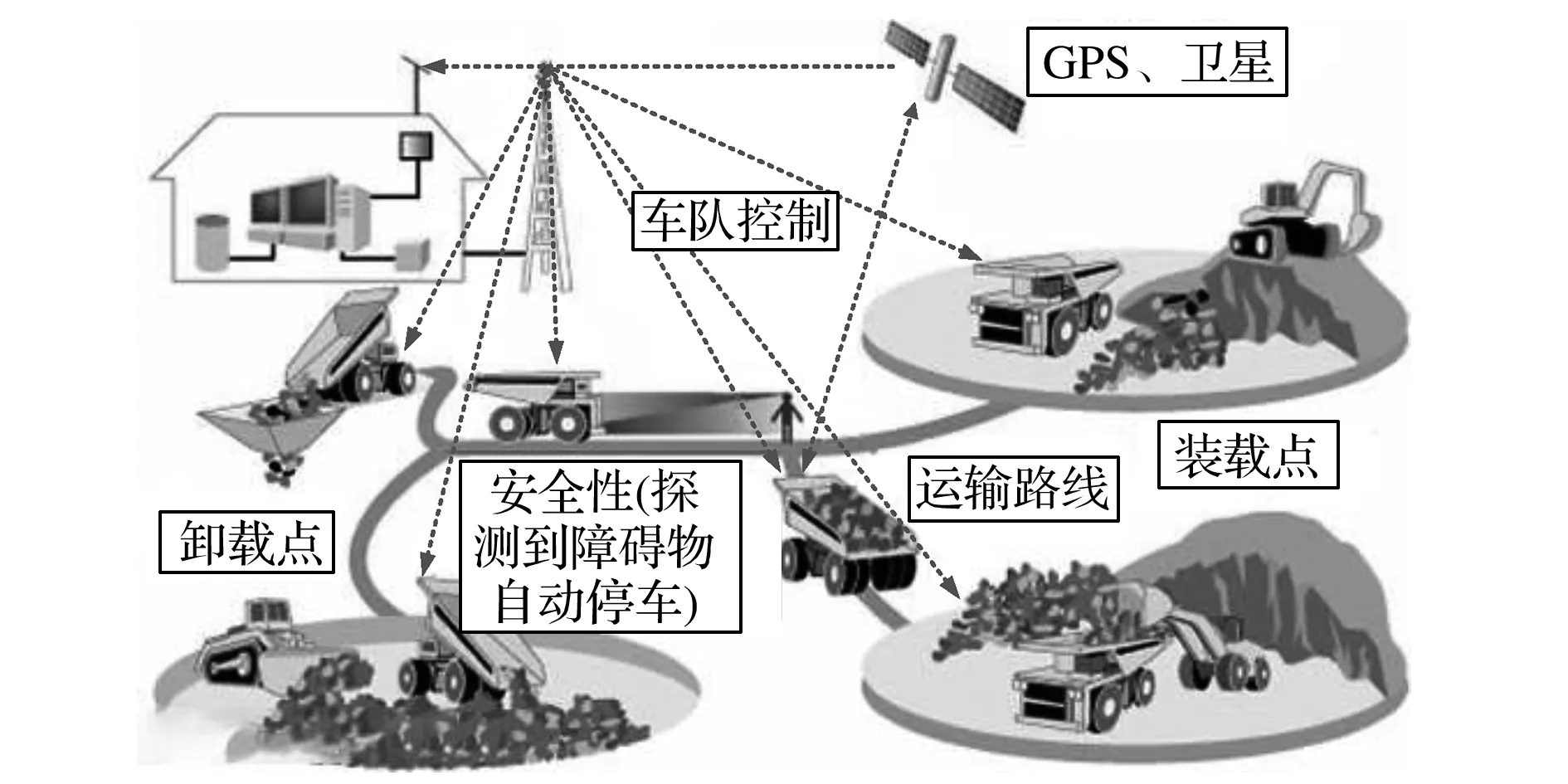
圖2 小松AHS系統(tǒng)
AHS系統(tǒng)的優(yōu)點(diǎn)可概括為:①減少對卡車司機(jī)的需求量和依賴性;②提高工作效率、增加運(yùn)行時(shí)間;③提高礦山工作的安全性,減少工作意外,無人駕駛的工作車輛可以代替人工到更危險(xiǎn)的地帶工作;④節(jié)省燃油和減少碳排放,更加環(huán)保;⑤節(jié)省人工運(yùn)輸費(fèi)用,減緩輪胎損耗,降低運(yùn)行成本。
2.1.2 美國卡特彼勒(Caterpillar)
美國卡特彼勒(Caterpillar)于20世紀(jì)80年代末開始無人駕駛自卸礦用卡車的研究,并改裝出礦用自動(dòng)化卡車AMT。該型卡車在前、后、側(cè)面均配備了掃描雷達(dá)系統(tǒng),可檢測道路上的人員和障礙物,卡車到達(dá)裝車位置時(shí)自動(dòng)停車。之后,卡特彼勒不斷完善礦山之星(MineStar)系統(tǒng),該系統(tǒng)還包括車隊(duì)配置、地形測試、數(shù)據(jù)監(jiān)測、設(shè)備監(jiān)控、管理運(yùn)用等子系統(tǒng)。截至2019年3月,CAT無人駕駛卡車?yán)塾?jì)行駛超過3500萬公里,運(yùn)送的物料超過10億t。
CAT的自動(dòng)化系統(tǒng)主要包括定位、環(huán)境監(jiān)測、機(jī)器控制、無線通信和位置控制,原理是基于精確的GPS,在比較固定的路線行駛,GPS接收器不斷地監(jiān)測卡車的位置和方向,激光掃描卡車前面的路面確定是否有障礙物,數(shù)據(jù)經(jīng)過處理決策后傳到執(zhí)行機(jī)構(gòu),卡車選擇避開或停止。數(shù)據(jù)采用無線傳輸,不使用電纜或其他固定安裝的設(shè)備,這使得路線變動(dòng)更易于實(shí)現(xiàn)。
除以上公司外,還有其他一些公司展開了相關(guān)研究。2016年沃爾沃公司發(fā)布了首輛礦用無人駕駛卡車,并在瑞典的地下礦井完成測試。2018年沃爾沃無人駕駛卡車項(xiàng)目落地挪威Kalk礦井,完成港口與礦井間往返礦石運(yùn)輸。
2.2 國內(nèi)發(fā)展現(xiàn)狀
中國從20世紀(jì)80年代開始無人駕駛汽車的研究,國防科技大學(xué)在1992年研制出中國第一輛真正意義上的無人駕駛汽車。國內(nèi)雖起步較晚,但近年來發(fā)展迅速。
徐工集團(tuán)以平行駕駛[8]理念為主線,與青島慧拓智能合作研發(fā)了徐工藍(lán)星系列,并于2018年寶馬展上,展出了油氣懸架無人駕駛智能寬體自卸車。該車采用了徐工“X-智能控制”無人駕駛技術(shù),擁有循跡行駛、智能避障、運(yùn)動(dòng)跟隨、自動(dòng)轉(zhuǎn)彎、人機(jī)交互及感知融合多種功能。徐工集團(tuán)的智慧礦山機(jī)械機(jī)群系統(tǒng)如圖3所示。
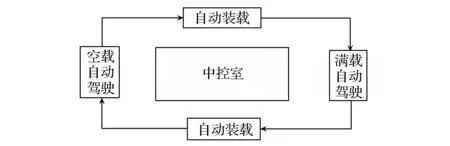
圖3 智慧礦山機(jī)械機(jī)群系統(tǒng)
由圖3可知,該系統(tǒng)由無人駕駛礦卡、半自動(dòng)挖掘機(jī)、和機(jī)群管理系統(tǒng)組成,實(shí)現(xiàn)整個(gè)礦山挖掘運(yùn)輸作業(yè)的全自動(dòng)化。
北京踏歌智行主要提供礦區(qū)無人駕駛的智能化改裝方案,傳感器選擇主要為激光雷達(dá)、毫米波雷達(dá)、GPS。因礦場內(nèi)多揚(yáng)塵,攝像頭作用受限,故激光雷達(dá)是主要傳感器,布置在車輛的前向與后向。另外,作業(yè)礦車在固定線路行駛,對高精度地圖的依賴性較小,且無人駕駛卡車一般為低速行駛,20m左右的感知范圍即可滿足需求,作業(yè)中的無人駕駛運(yùn)輸車如圖4所示。在控制方面,常用加裝機(jī)器人和線控改造兩種方案,其中100~200t特大型卡車多采用加裝機(jī)器人,而60~70t的礦用卡車一般使用線控改造。
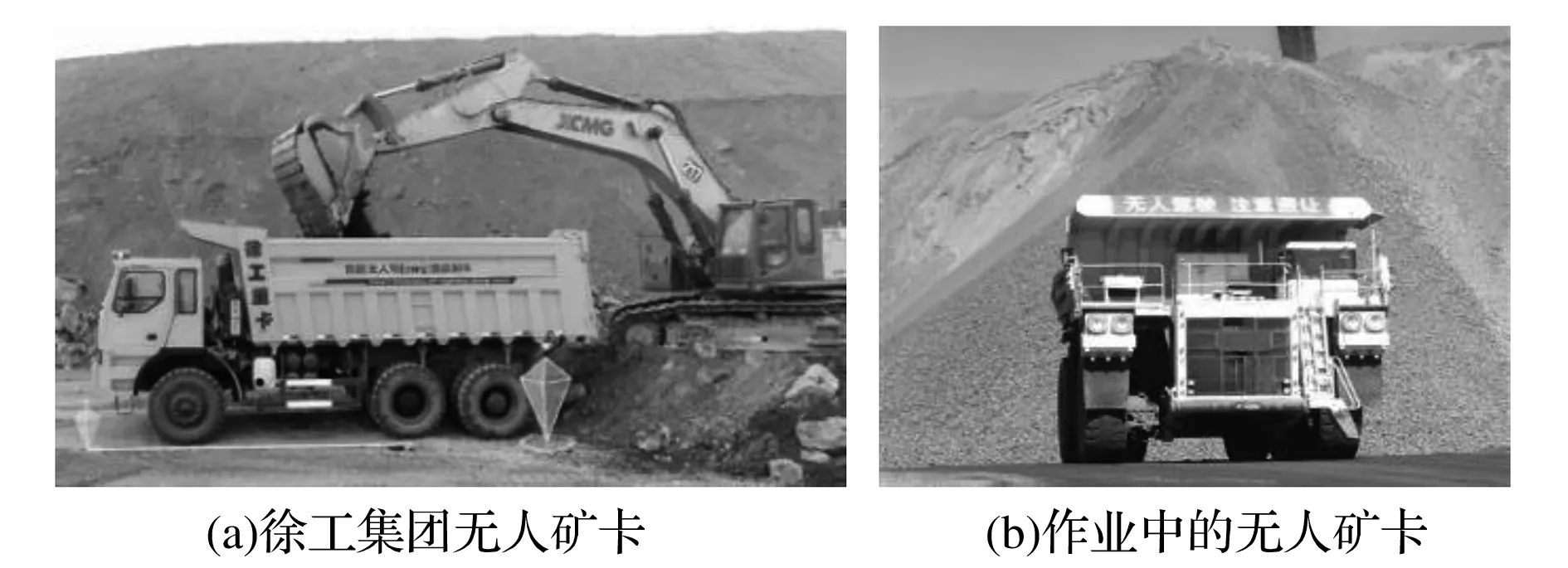
圖4 無人礦卡
近年來,國內(nèi)還有很多其他的機(jī)構(gòu)和企業(yè)致力于露天礦無人駕駛卡車及其系統(tǒng)的研究。隨著無人采礦技術(shù)被國家科技部列為“十一五”、“863”計(jì)劃首批啟動(dòng)專題的研究方向之一,發(fā)展數(shù)字化、智能化采礦,是我國采礦業(yè)未來的發(fā)展趨勢。
3 無人礦卡關(guān)鍵技術(shù)
無人礦卡車輛的主要任務(wù)是特定路線、場景上的物料運(yùn)輸[9]。車輛通過感知周圍環(huán)境,依據(jù)獲取的信息決策判斷,控制車輛沿期望軌跡行駛。涉及的關(guān)鍵技術(shù)分為環(huán)境感知、精確定位、決策與規(guī)劃、控制與執(zhí)行四個(gè)模塊,系統(tǒng)如圖5所示。
該系統(tǒng)是一個(gè)分層結(jié)構(gòu),各模塊發(fā)揮不同的作用并相互影響。下文將對四個(gè)模塊進(jìn)行分述。
3.1 環(huán)境感知
環(huán)境感知是無人礦卡車輛與外界信息交互的關(guān)鍵。為確保車輛對周圍環(huán)境的正確理解并做出合適決策,環(huán)境感知技術(shù)需利用攝像機(jī)、激光雷達(dá)、毫米波雷達(dá)等車載傳感器,獲得汽車所處位置的環(huán)境信息和車輛狀態(tài)信息,為無人駕駛的決策規(guī)劃提供服務(wù)。主流感知技術(shù)包括視覺感知、激光感知、微波感知等,對比見表3。
對礦區(qū)無人駕駛,影響感知精度的因素主要表現(xiàn)在:①粉塵多,影響傳感器的探測距離和感知精度;②道路不平整,碎石、坡路多,影響車輛行駛平穩(wěn)性進(jìn)而影響傳感器精度;③礦區(qū)環(huán)境溫差大,需要所搭載的傳感器工作溫度范圍廣。考慮車輛作業(yè)環(huán)境的特殊性,礦山無人駕駛運(yùn)輸車的感知系統(tǒng)需采用多源異構(gòu)傳感器融合的方法,以提高對環(huán)境感知的準(zhǔn)確性和魯棒性[10],另外,所使用的傳感器要有較強(qiáng)的自適應(yīng)能力、抗干擾能力等。實(shí)際應(yīng)用中的傳感器一般選擇多個(gè)對粉塵敏感度低的毫米波雷達(dá),并融合包括激光雷達(dá)、攝像頭等多種傳感器信息,提高感知模塊在礦山環(huán)境下的感知能力。
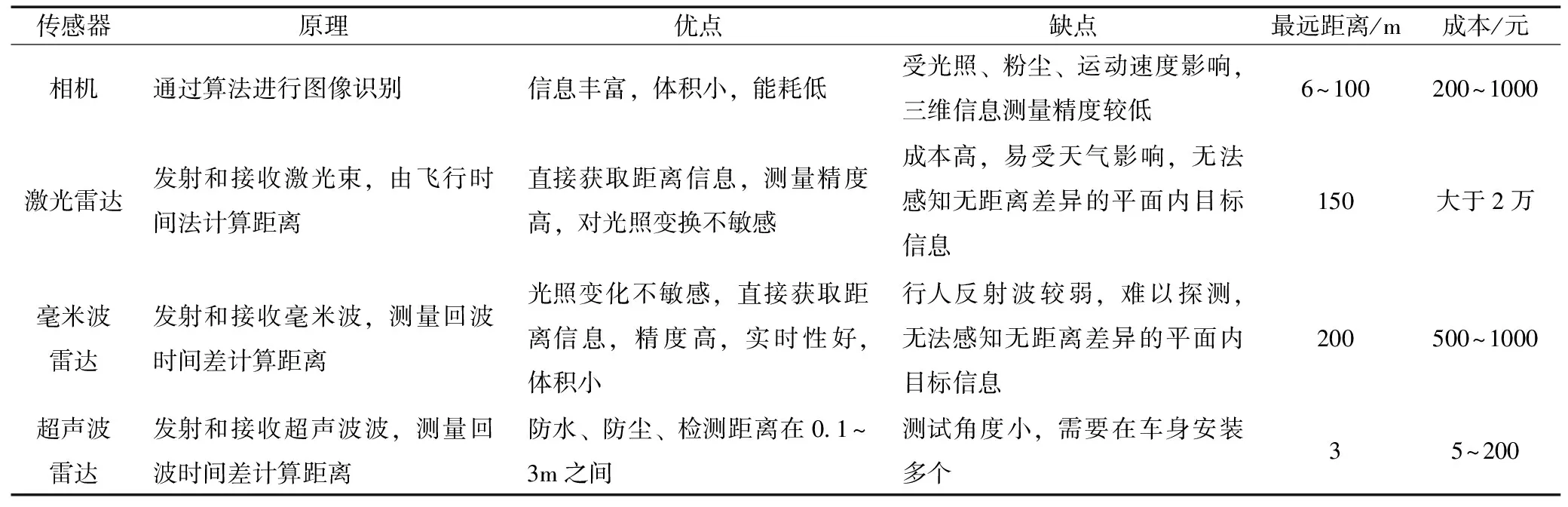
表3 感知方法比較
3.2 定位導(dǎo)航
無人駕駛汽車的基礎(chǔ)是精準(zhǔn)定位,不僅需要獲取車輛與外界環(huán)境的相對位置關(guān)系,還需要通過車輛狀態(tài)確定車輛的絕對位置與方位。主流的導(dǎo)航技術(shù)包括全球定位系統(tǒng)(GPS)、磁導(dǎo)航[11]、慣性導(dǎo)航、SLAM,其優(yōu)缺點(diǎn)及定位精度對比見表4。
GPS是目前應(yīng)用最成熟、廣泛的車輛定位技術(shù),雖頻率低,在城市高樓密集或隧道等環(huán)境中,存在多路徑反射、信號(hào)易被遮擋或丟失等問題[12],但仍是現(xiàn)今城市開放道路無人駕駛定位導(dǎo)航技術(shù)中不可或缺的部分。露天礦山空曠、開闊、無遮擋的環(huán)境區(qū)別于城市道路,不存在多路徑反射問題,這大大提高了GPS定位精度和可靠性。另外,結(jié)合表4可知,單一的導(dǎo)航方式存在局限,不能同時(shí)滿足多種場景需求,通常采用多傳感器融合的方式增加系統(tǒng)的魯棒性,常用的融合定位的方式有:
1)GPS和慣性導(dǎo)航融合定位,定位精度依賴傳感器成本,精度范圍一般在幾十米到幾厘米之間,精度越高,相應(yīng)傳感器的價(jià)格越昂貴。
2)基于點(diǎn)云地圖和激光雷達(dá)定位[13],可以實(shí)現(xiàn)車輛的高精度定位,但是需要提前構(gòu)建高精度地圖,所需的硬件設(shè)備和數(shù)據(jù)處理成本及地圖更新、維護(hù)的成本較高。
3)毫米波雷達(dá)和攝像機(jī)融合定位[14],毫米波雷達(dá)受光照和天氣的影響較小,穩(wěn)定性好,探測精度較高,距離較遠(yuǎn),可以彌補(bǔ)單一視覺傳感器精度不夠,穩(wěn)定性差,檢測距離近問題。
4)攝像機(jī)和慣性導(dǎo)航系統(tǒng)的組合定位[15],主要是對齊時(shí)間戳,完成基于視覺里程計(jì)信息和IMU航跡推算信息的松耦合或緊耦合,估計(jì)車體位置和姿態(tài),成本低,理想環(huán)境中定位效果好,實(shí)際應(yīng)用中受環(huán)境影響較大。
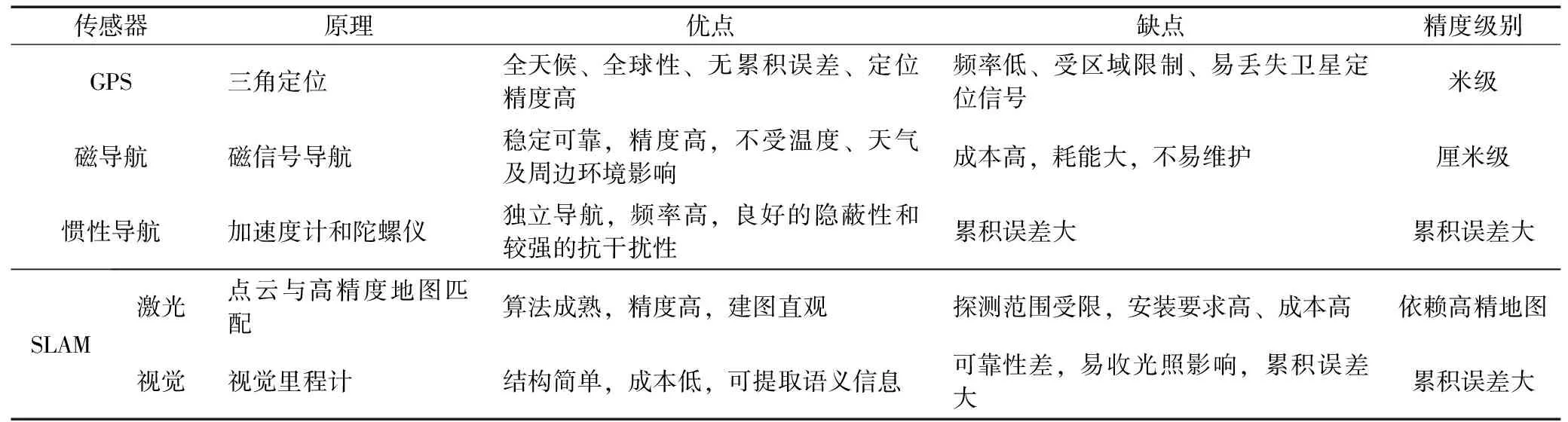
表4 定位方法比較
在無人礦卡的實(shí)際應(yīng)用中,工作環(huán)境粉塵多、道路標(biāo)示性差、路面不平整、氣候多變等自然因素影響傳感器精度,車輛常采用多重冗余定位,一般包括RTK差分定位、點(diǎn)云匹配定位和局部定位等,以確保車輛復(fù)雜工況下的精準(zhǔn)定位。
3.3 決策與規(guī)劃
無人駕駛車輛的行為決策與路徑規(guī)劃是依據(jù)環(huán)境感知信息和導(dǎo)航系統(tǒng)輸出的結(jié)果,通過一些特定的約束條件規(guī)劃出給定起止點(diǎn)之間的多條可選路徑,并在這些路徑中選取最優(yōu)的路徑作為車輛行駛軌跡。
目前,無人駕駛車輛主要使用的行為決策算法有三種:①基于神經(jīng)網(wǎng)絡(luò):采用神經(jīng)網(wǎng)絡(luò)確定具體的場景并做出適當(dāng)?shù)男袨闆Q策;②基于規(guī)劃:列出所有可能的組合,再用基于規(guī)則的技術(shù)路線對汽車的決策系統(tǒng)編程;③混合路線:綜合以上兩種方?jīng)Q策方法。其中混合路線當(dāng)前應(yīng)用最為廣泛。
規(guī)劃系統(tǒng)通常包含兩項(xiàng)內(nèi)容:第一項(xiàng)是路徑規(guī)劃,即路徑局部規(guī)劃,無人駕駛車輛中的路徑規(guī)劃算法會(huì)在行駛?cè)蝿?wù)設(shè)定之后將完成任務(wù)的最佳路線選出來,避免碰撞。第二項(xiàng)是駕駛?cè)蝿?wù)規(guī)劃,即全局路徑規(guī)劃,主要的規(guī)劃內(nèi)容是指行駛路徑范圍的規(guī)劃,當(dāng)無人駕駛車輛行駛時(shí),駕駛?cè)蝿?wù)規(guī)劃會(huì)為車輛的無人駕駛提供方向引導(dǎo)方面的行為決策。
3.4 控制與執(zhí)行
控制和執(zhí)行主要是使車輛在不同道路和場景下保持自適應(yīng)能力和較強(qiáng)魯棒性的主動(dòng)控制,是無人駕駛汽車行駛的基礎(chǔ)。通常包括對車輛的縱向控制和橫向控制:①縱向控制,即車輛的驅(qū)動(dòng)與制動(dòng)控制,是指通過油門和制動(dòng)的協(xié)調(diào),實(shí)現(xiàn)對期望車速的精準(zhǔn)跟隨;②橫向控制,即通過方向盤角度的調(diào)增以及輪胎力的控制,實(shí)現(xiàn)無人駕駛汽車的路徑跟蹤。當(dāng)前研究較多的是橫向控制,運(yùn)用的方法主要包括滑膜控制、模糊控制、神經(jīng)網(wǎng)絡(luò)控制、最優(yōu)控制、自適應(yīng)控制和純跟蹤控制等。另外,車輛控制平臺(tái)是無人車的核心部件,控制著車輛的各種控制算法,其主要包括電子控制單元(ECU)和通信總線兩部分。ECU主要用來實(shí)現(xiàn)控制算法,通信總線主要同來實(shí)現(xiàn)ECU與機(jī)械部件之間的通信功能,通常以CAN總線為代表。
4 無人礦卡發(fā)展趨勢
通過對國內(nèi)外研究現(xiàn)狀的總結(jié)和分析,結(jié)合智慧礦山建設(shè)需求、環(huán)境特點(diǎn)、無人駕駛關(guān)鍵技術(shù)發(fā)展等因素,預(yù)測露天礦無人礦卡發(fā)展趨勢如下:
1)人工智能、視覺感知:目前激光雷達(dá)是礦山感知系統(tǒng)中的主要設(shè)備,但雷達(dá)數(shù)據(jù)稀疏、價(jià)格昂貴,而相機(jī)攜帶豐富的數(shù)據(jù)信息,且對于復(fù)雜的路況檢測,借助深度學(xué)習(xí)能夠滿足高精度需求。深度學(xué)習(xí)在算法和樣本量足夠的情況下,視覺感知的準(zhǔn)確率可以達(dá)到99.9%以上。隨著智能化算法的發(fā)展,相機(jī)將以其低廉的價(jià)格、豐富的環(huán)境信息,在感知領(lǐng)域發(fā)揮越來越重要的作用。
2)自主定位、多傳感器融合:當(dāng)前無人礦卡運(yùn)輸系統(tǒng)主要應(yīng)用GPS和慣性導(dǎo)航組合定位,激光雷達(dá)和高精度地圖輔助定位,但部分礦區(qū)GPS信號(hào)覆蓋差,難以保證信號(hào)的穩(wěn)定性和連續(xù)性,且礦區(qū)環(huán)境多變,這對高精度地圖的制作和更新帶來挑戰(zhàn),另外,對于礦山運(yùn)輸中的裝載、卸載、會(huì)車等關(guān)鍵環(huán)節(jié),往往需要精準(zhǔn)定位,發(fā)展基于車輛所處環(huán)境的自主定位方式,利用多傳感器信息融合是實(shí)現(xiàn)車輛精準(zhǔn)定位的有效途徑。
3)云計(jì)算、云存儲(chǔ):鑒于無人駕駛對運(yùn)算量的巨大需求,依賴5G網(wǎng)絡(luò)大帶寬、低時(shí)延、廣連接的特性,以滿足超大數(shù)據(jù)量的低時(shí)延傳輸,實(shí)現(xiàn)車隊(duì)之間協(xié)同運(yùn)轉(zhuǎn),共享車隊(duì)感知數(shù)據(jù),并讓車載服務(wù)器走上云端,解放車上空間。另外,云存儲(chǔ)系統(tǒng)在采礦業(yè)中有明顯的優(yōu)勢,可以協(xié)調(diào)多個(gè)礦區(qū)的生產(chǎn)、設(shè)備運(yùn)行等。
4)車路協(xié)同、輔助智能:全開放環(huán)境的無人駕駛以目前技術(shù)短期內(nèi)很難實(shí)現(xiàn),即使在特定場景依然難以保障安全高效的長時(shí)間運(yùn)行,增加基礎(chǔ)建設(shè)以輔助駕駛,就可以降低系統(tǒng)難度,從實(shí)現(xiàn)落地,以及安全的角度來看,未來的無人駕駛不會(huì)是簡單的單車智能,而是逐步走向車路協(xié)同的模式。
5 結(jié) 語
無人化與智能化的采礦方式是現(xiàn)代礦山發(fā)展的必然趨勢,露天礦無人駕駛運(yùn)輸技術(shù)充分利用了露天礦人流量少、場景單一、運(yùn)輸路線相對固定等優(yōu)勢,結(jié)合感知、定位、決策控制等無人駕駛關(guān)鍵技術(shù),為露天礦開采運(yùn)輸過程中調(diào)度困難、人工成本高、安全事故多發(fā)等突出問題帶來了新的解決方案,也為智慧礦山建設(shè)注入了新的活力。
然而,無人駕駛技術(shù)面臨感知、等位等技術(shù)瓶頸,要在技術(shù)魯棒性和高成本之間找到最優(yōu)解。另一方面,露天礦工作場景粉塵多、環(huán)境特征不明顯、氣候惡劣等因素影響傳感器正常工作。要解決上述問題,需借助深度學(xué)習(xí)、目標(biāo)識(shí)別、自主定位、云計(jì)算等相關(guān)領(lǐng)域的進(jìn)一步發(fā)展,但是,無人駕駛礦用卡車無論是從應(yīng)用場景、需求,還是從成本控制、提升安全層面出發(fā),都將迎來重要發(fā)展機(jī)遇。可以預(yù)見,未來無人駕駛將更多的滲透到采礦行業(yè),加快智慧礦山建設(shè),使采礦業(yè)實(shí)現(xiàn)跨越式發(fā)展。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
現(xiàn)代礦業(yè)(2021年12期)2022-01-17 07:30:32
河北地質(zhì)(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
礦產(chǎn)勘查(2020年7期)2020-12-25 02:43:42
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34