對海探測雷達多目標跟蹤技術綜述
2021-03-04 13:45:54王月基
雷達學報 2021年1期
柳 超 王月基
(海軍航空大學 煙臺 264001)
1 引言
多目標跟蹤(Multi-Target Tracking,MTT)的目的是從被噪聲污染的傳感器量測中估計出目標的數目和運動狀態[1]。自從上世紀60年代在美國航天工程中開始應用以來,在半個多世紀的發展過程中,多目標跟蹤技術已被廣泛應用于人類生活和工業生產的方方面面。尤其是過去的十多年中,隨著傳感器技術和計算機技術的飛速發展,多目標跟蹤在理論上取得了大量新的突破,并被應用于諸如空中交通管制、自動駕駛、計算機視覺、生物醫學以及國土防空、海洋監控等諸多領域。
構建布局嚴密、功能強大的海洋監控體系是鞏固國防、維護國家海上安全的重要舉措。在復雜的海洋監控體系中,雷達由于在目標探測方面的獨特優勢而發揮著不可替代的重要作用。在當前日益嚴峻的海上安全形勢下,雷達對海探測的重要性不斷上升,作用進一步突出。因此,加強對海上多目標跟蹤技術的研究,實現更加準確、高效的海上態勢感知具有十分重要的現實意義。
多目標跟蹤方法有很多,但目前應用最為廣泛的主要包括多假設跟蹤[2](Multiple Hypothesis Tracking,MHT)算法、聯合概率數據關聯[3](Joint Probability Data Association,JPDA)濾波器和基于隨機有限集[4](Random Finite Set,RFS)的多目標濾波器。MHT和JPDA是兩種經典的多目標跟蹤方法,其基本處理步驟是先進行數據關聯,再進行單目標濾波。數據關聯是將量測分配給目標或虛警的過程;單目標濾波則是利用分配的量測進行狀態估計的過程。卡爾曼濾波器(Kalman Filter,KF)、擴展卡爾曼濾波器(Extended Kalman Filter,EKF)、不敏卡爾曼濾波器(Unsented Kalman Filter,UKF)、高斯和濾波器(Gaussian Sum Filter,GSF)、粒子濾波器(Particle Filter,PF)、容積卡爾曼濾波器(Cubature Kalman Filter,CKF)以及粒子流濾波器[5](Particle Flow Filter,PFF)等都是常見的單目標濾波器。與MHT和JPDA等依靠數據關聯進行多目標跟蹤的方法不同,近年提出的RFS方法沒有獨立的數據關聯環節,而是將不確定性的關聯問題歸集到貝葉斯框架,并通過貝葉斯多目標濾波公式直接計算多目標后驗密度的最優或次優估計。
海上多目標跟蹤(Maritime Multi-Target Tracking,MMTT)作為雷達多目標跟蹤的一個重要應用場景,既有一般場景的共性(如都具有目標量測,雜波,噪聲干擾等),也有海上目標環境的特殊性(如量測形態的差異,海雜波的拖尾分布等)。常用的多目標跟蹤方法均能應用于海上多目標跟蹤,但需要根據海上環境的特點進行調整,以發揮最優性能。目前來看,相較于一般場景,海上多目標跟蹤面臨的挑戰更大,難度更高。這是因為,一方面,動態的海洋環境相比陸地具有更加復雜的頻譜特征,海雜波常表現出明顯的非高斯、非線性和非平穩特性,小目標的回波信號具有較低的信雜比和多變的起伏特性,使得傳統的檢測方法性能惡化,增加了漏檢和虛警概率,進而導致多目標跟蹤方法的性能下降,出現跟蹤不連續、航跡起始延遲以及虛假航跡等問題;另一方面,當海面目標以多群形式編隊運動,或采用高分辨率雷達對海探測時,目標量測容易呈現跨單元分布的特征,并以自身形狀、尺寸為基礎產生一維或二維擴展,導致傳統的跟蹤方法難以應用。
通過對國內外相關文獻分析了解到,目前學者們針對一般場景下的多目標跟蹤問題研究比較多,但針對海洋環境下的多目標跟蹤問題研究還比較少。并且,現有的相關文獻大都側重于針對單一情形進行分析,而缺乏對海上多目標跟蹤所面臨問題的總體思考與關聯研究,沒有形成完整的方法體系。為此,我們在許多學者所做研究的基礎上,針對海上多目標跟蹤所面臨的問題以及相應的解決方法進行簡要梳理,以探尋海上多目標跟蹤技術的發展趨勢,并在此基礎上對海上多目標跟蹤技術的未來發展進行展望。
2 問題描述
多目標跟蹤技術首先應用于雷達領域,并隨著任務需求的提高和雷達技術的進步獲得了快速發展。圖1展示了一個典型的雷達測量場景。在某個時刻,雷達觀測區域內存在6個目標,而實際獲取的量測有9個。從圖1可以看到,這9個量測中包含了2個由點目標產生的量測Z1和Z4,由兩個相距很近的不可分辨目標產生的量測Z2,由一個擴展目標產生的量測Z7~Z9,以及3個虛警Z3,Z5和Z6。此外,還有1個目標因為漏檢而沒有產生量測。這一場景同樣提供了雷達對海探測的典型態勢:點目標量測Z1和Z4來自于海上的一般目標,Z2可能來自于距離雷達較遠或采用低分辨率雷達探測時的群目標,Z7~Z9可能來自于距離雷達較近或采用高分辨率雷達探測時的編隊目標或擴展目標,虛警Z3,Z5和Z6可能是由海尖峰造成的。
單從每個時刻的量測數據分析,我們往往無法直接確定某個量測究竟來自于目標還是虛警,這一現象稱為量測源的不確定性[4]。從圖1還可以看到,由于雷達存在測量噪聲,目標產生的量測往往在一定程度上偏離目標的真實位置。需要指出的是,不同的對海探測雷達,測量噪聲往往不同。比如,地波超視距雷達的距離誤差可達數公里,而船用導航雷達的距離誤差僅有幾米。即便是同型號雷達,測量噪聲也不一定相同。在每個觀測時刻,這種具有量測源的不確定性且被量測噪聲污染的數據被送入跟蹤濾波器中,用于估計目標的航跡。

圖1 典型雷達測量場景Fig.1 Typical radar measurement scenario
在實際的雷達多目標跟蹤環境中,不僅目標的運動狀態會隨時間變化,目標的數目也會由于目標的出現(進入觀測區域)或消失(離開觀測區域或進入觀測盲區等)而產生變化。即便對于在觀測區域中持續存在的目標,也可能因為漏檢而不產生量測。此外,虛警的產生具有很大的隨機性。在這些因素的共同作用下,每個時刻雷達跟蹤器獲得的量測數目往往都是不同的。圖2是某對海監視雷達在前后兩個時刻進行多目標跟蹤的結果。從這兩幅子圖可以看到,目標220#持續運動,目標222#在第2個時刻消失,目標227#則在第2個時刻形成航跡。此外,還可以看到第2個時刻每個扇區中虛警的數量和分布情況都與第1個時刻不同。
如前所述,多目標跟蹤的目的是通過傳感器量測估計出目標的數目和狀態。為此,首先需要對多目標狀態和傳感器量測進行建模。為了闡明目標和量測隨時間變化的一般規律,采用圖3所示的多目標系統模型[1]。從圖3可以看到,在k?1 時刻存在5個目標,有的目標僅產生了1個量測,有的目標產生了多個量測,這5個目標共產生了8個量測;在k時刻目標數減少為3個,目標產生的量測數減少為6個。k時刻存在的3個目標中,有的是從k?1 時刻存活下來的,但由于目標運動,其狀態發生了變化;有的是在k?1 時刻并不存在而在k時刻新出現的目標。
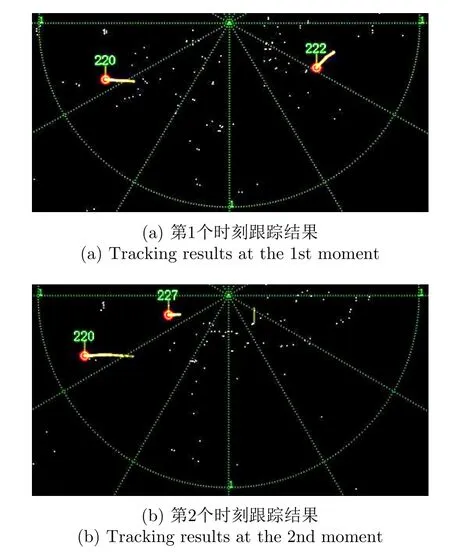
圖2 雷達跟蹤結果Fig.2 Radar tracking results
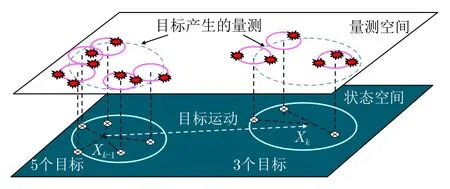
圖3 多目標系統模型Fig.3 Multi-target system model
為了表示目標狀態隨時間的變化,需要建立目標狀態的轉移模型。目前,大部分多目標跟蹤方法采用“標準多目標轉移模型”。下面對這一模型進行簡要介紹。
假設在k ?1時刻存在一個目標xk?1,則在k時刻它可能以PS,k|k?1(xk?1) 的概率繼續存在并根據狀態轉移密度fk|k?1(xk|xk?1) 過渡到一個新的狀態xk,也可能以1–PS,k|k?1(xk?1) 的概率消失。此外,在k時刻還可能在狀態空間的任意位置出現任意數量的新目標。該模型假設每一個目標的出現和變化都是獨立的,與其他目標沒有關系。
為了確定目標狀態和傳感器量測之間的關系,需要建立目標的量測模型。在圖3所示的多目標系統模型中,每個目標都有可能產生1個或多個量測,也有可能多個目標僅產生1個量測。這種目標數和對應量測數上的不確定性體現了一個具有廣泛意義的雷達探測場景,該場景中不僅包含了常規的點目標、不可分辨目標以及擴展目標等不同的目標類型,同時還考慮了多徑效應、遮擋和漏檢等物理現象。為了匹配不同的目標類型或物理現象,學者們提出了多種量測模型,主要包括“標準多目標量測模型”[1,4],合并量測或不可分辨量測模型[6,7],擴展/群目標量測模型[8,9],檢測前跟蹤/圖像量測模型[10,11],疊加量測模型[12,13]等。這里僅介紹目前在多目標跟蹤領域應用最為廣泛的“標準多目標量測模型”。
假設在k時刻存在一個目標xk,則它可能以PD,k(xk)的概率被檢測,并根據似然函數gk(zk|xk)生成量測zk,也可能以1–PD,k(xk) 的概率漏檢。除目標產生的量測外,雷達跟蹤器也會接收到隨機數量的虛警,它們可能出現于量測空間的任意位置。“標準多目標量測模型”假定,每一個目標產生量測的過程與其他目標和虛警都是獨立的,且每一個量測最多只能產生于1個目標。
在多目標跟蹤領域,目前大部分方法都采用“標準多目標量測模型”。本文中將這些跟蹤方法統稱為常規多目標跟蹤方法,以區別于多目標檢測前跟蹤方法和多擴展/群目標跟蹤方法等。此外,我們將一些學者提出的幅度信息輔助的多目標跟蹤方法單獨劃分成一類。下面,我們分別針對常規多目標跟蹤方法、幅度信息輔助的多目標跟蹤方法、多目標檢測前跟蹤方法、多擴展/群目標跟蹤方法以及它們在海上多目標跟蹤領域的應用等進行介紹。
3 常規多目標跟蹤方法
在多目標跟蹤技術的發展過程中,學者們先后提出了多種行之有效的實現方法,其中應用最為廣泛的主要是JPDA,MHT和RFS這3種。下面分別對這3種方法的國內外研究現狀進行簡要介紹。
3.1 JPDA方法
為了解決單目標跟蹤時的數據關聯問題,Bar-shalom等人[14]于1975年提出了概率數據關聯(Probability Data Association,PDA)濾波器,通過對落入相關波門內的點跡進行加權求和得到一個組合的量測來更新目標狀態。JPDA[3]濾波器是對PDA濾波器在多目標場景下的推廣,采用聯合關聯事件和聯合關聯概率來避免多目標情況下量測與航跡分配時的沖突。JPDA濾波器中聯合關聯概率的計算復雜度隨目標數和量測數的增加而呈指數增長,為解決這一問題,學者們先后提出一系列優化算法。由于基礎的JPDA濾波器僅能處理目標數目固定且已知的情況,無法滿足雷達實際探測的需要,因此不少學者對JPDA濾波器進行了新的推廣,以適應目標數目未知且時變的場景,例如聯合集成PDA(Joint Integrated PDA,JIPDA)濾波器[15]。
3.2 MHT方法
JPDA濾波器是一種針對單次掃描的關聯算法,而在雷達實際應用中,僅采用單次掃描的結果容易出現關聯錯誤。MHT[2]則是一種根據當前和歷史量測進行數據關聯的算法。在每個時刻MHT傳遞和保持一個具有很高多目標后驗密度或航跡分數的關聯假設集,當接收到新的量測集后,根據現有的假設集來創建一個新的關聯假設集,同時目標的后驗概率和航跡分數通過貝葉斯準則進行更新。目前主要有兩種類型的MHT算法,一種是面向假設的MHT[2](Hypothesis-Oriented MHT,HOMHT),一種是面向航跡的MHT[16](Track-Oriented MHT,TOMHT)。TOMHT又有兩個不同的分支,分別為基于樹形的TOMHT[17,18]和基于非樹形的TOMHT[19,20],這兩種方法中航跡數量有明顯差異。
3.3 RFS方法
RFS方法通過把多目標狀態表示為一個隨機有限集,從而保持了與單目標貝葉斯估計相同的處理框架[4]。在這一框架下,RFS方法能夠處理非常復雜的多目標跟蹤問題,比如虛警為非泊松非均勻分布[21–23]、目標檢測概率依賴于目標狀態[21,24]、擴展目標[9]、合并量測[12,13]和分布式多目標跟蹤[25–27]等場景下的跟蹤問題。2003年,Mahler[28]采用有限集統計(FInite Set STatistic,FISST)理論提出了多目標貝葉斯濾波器的一種易于計算的近似方法—概率假設密度(Probability Hypothesis Density,PHD)濾波器。它通過傳遞多目標后驗密度的1階矩即概率假設密度來實現多目標后驗密度的估計。文獻[29]從經典點過程理論出發對PHD濾波器進行了重新推導。文獻[30]給出了PHD濾波器的直觀解釋。在線性高斯多目標(Linear Gaussian Multitarget,LGM)模型下,Vo等人[31]推導了PHD濾波器的閉合形式的解—高斯混合PHD(Gaussian Mixture PHD,GM-PHD)濾波器。針對高度非線性問題,他又提出了粒子PHD(Particle Filter PHD,PF-PHD)濾波器[32],也稱序貫蒙特卡洛PHD(Sequential Monte Carlo PHD,SMC-PHD)濾波器。文獻[33,34]對PF-PHD濾波器的收斂性進行了分析。由于PFPHD濾波器在提取目標狀態時需要對粒子進行聚類,這增加了額外的處理步驟。對此,Whiteley等人[35]提出的輔助粒子PHD(Auxiliary Particle Filter PHD,APF-PHD)濾波器,Ristic等人[36]提出的量測驅動PF-PHD濾波器可在一定程度上解決這一問題。由于PHD濾波器假設勢分布為泊松分布,其均值和協方差相同,因此當目標數較多時勢估計的協方差很大。為了實現對目標數目的更準確估計,Mahler[37]提出了同時傳遞PHD和多目標勢分布的勢概率假設密度(Cardinalized PHD,CPHD)濾波器,Vo等人[38]隨后提出了CPHD濾波器的一種解析實現方式。與PHD濾波器相比,CPHD濾波器的計算復雜度較高。這是因為PHD濾波器的復雜度關于量測數目是線性關系,而CPHD濾波器則是,其中|Zk|為量測數。目前PHD/CPHD濾波器已應用于同時估計虛警率、檢測概率和多目標狀態[21]的場景,與多模型相結合應用于機動目標跟蹤[39]場景,并且在擴展目標跟蹤[9]、疊加量測[13]、多傳感器[40,41]和分布式多目標跟蹤[25–27]場景下也有重要應用。PHD/CPHD濾波器的一個嚴重缺陷是當目標漏檢時會產生“奇異效應”[1],嚴重影響濾波性能。與PHD/CPHD采用的矩近似方法不同,Mahler[4]隨后提出的多目標多伯努利(Multi-target Multi-Bernoulli,MeMBer)濾波器利用多伯努利分布近似多目標后驗密度,同時估計每個目標的狀態和存在概率。但是Vo等人[42]指出這一MeMBer濾波器存在嚴重的勢估計偏差,為此他提出了一種勢平衡的MeMBer(Cardinality Balanced MeMBer,CB-MeMBer)濾波器來校正這一偏差。CB-MeMBer可以有效克服PHD/CPHD的“奇異效應”,且能夠獲得與CPHD相同的勢估計性能。必須指出的是,PHD/CPHD濾波器以及CB-MeMBer濾波器實現的前提是多目標狀態集中的目標是無法區分的,因而它們不能輸出目標航跡。為解決這一問題,Vo提出了廣義標簽多伯努利(Generalized Labeled Multi-Bernoulli,GLMB)RFS,為每個目標的狀態添加唯一的標簽,由于GLMB分布是標準多目標似然函數的共軛先驗,且在Chapman-Kolmogorov方程下是閉合的,因而極大地方便了貝葉斯多目標濾波公式的計算,最終在GLMB分布的基礎上,Vo等人[43]推導出能夠輸出目標航跡的δ-GLMB濾波器(又稱為GLMB濾波器[1])。關于GLMB濾波器的實現步驟,Vo等人在文獻[44]中進行了詳細介紹。針對GLMB濾波器計算復雜度高的問題,Reuter等人[45]提出一種與之性能相近的近似實現方法—標簽多伯努利(Labeled Multi-Bernoulli,LMB)濾波器。之后,Vo等人[46]采用LMB濾波器在雜波密集條件下對上千個目標實現了同時跟蹤。
RFS方法自2003年提出以來,就迅速吸引了國內學者的廣泛關注,所開展的研究包括雷達多目標跟蹤,紅外多目標跟蹤,多傳感器,同步定位與地圖創建(Simultaneous Localization And Mapping,SLAM)以及視頻目標跟蹤等[47–51]。
目前,針對常規多目標跟蹤方法,學者們大都基于一些通用場景進行研究,而基于海上目標跟蹤場景開展的研究還比較少。在這方面,大連理工大學的Xu等人[52]于2001年提出一種針對海上目標的多平臺純角度跟蹤融合方法,首先采用單平臺的變增益卡爾曼濾波器跟蹤海上目標,然后提出一種多平臺的目標融合算法。波蘭的Stateczny等人[53]于2008年提出一種采用多傳感器卡爾曼濾波器的分散化海上目標融合概念。2018年挪威國防研究院的Gade等人[54]針對海上目標機動情況下因預測時間較長導致橢圓波門無法預測目標位置的問題,提出一種非橢圓確認波門。上海海事大學的Wei等人[55]針對水下自主航行器的跟蹤問題,提出一種基于運動目標跟蹤方法的模型預測控制(Model Predictive Control,MPC)算法,首先通過聲吶圖像實時識別和定位運動目標,之后采用卡爾曼濾波器預測目標位置,最后采用MPC算法跟蹤目標。
4 幅度信息輔助的多目標跟蹤方法
在目標相距較近或存在大量虛警的條件下,傳統多目標跟蹤方法,如JPDA和MHT,容易產生關聯錯誤,并導致跟蹤性能下降。為了解決這個問題,一些學者提出將目標的幅度信息(Amplitude Information,AI)引入多目標跟蹤算法中,利用目標和雜波在幅度統計特性上的差異提升二者的區分度,進而得到更好的跟蹤結果。Lerro等人[56]分析了窄帶高斯背景下回波幅度服從Rayleigh分布的窄帶信號的檢測過程,推導了檢波前后回波包絡的似然比,并將其引入到PDA的關聯權重計算中,提升了跟蹤濾波器的性能。該文獻提出的幅度信息輔助量測-航跡關聯(AI Aided Measurement Track Association,AIA-MTA)方法為后來的許多文獻所采用。Ehrman等人[57]定量分析了文獻[56]中AIA-MTA的量測交叉點和航跡交叉點,指出該方法對于密集雜波環境下跟蹤單個目標有很好的效果,但是對于多個目標并不理想,因為該方法總是青睞幅度高的量測,而忽視量測的狀態。隨后,他提出在AIAMTA中引入歸一化的目標幅度似然函數而非幅度似然比來解決這一問題。他計算了Rayleigh目標、固定幅度目標和萊斯目標的量測-航跡關聯的錯誤概率,并對5種AIA-MTA方法進行了比較,指出沒有任何一種方法能夠適用于所有場景,因此需要結合特定的場景選用合適的方法。Clark等人[58]將文獻[56]中提出的包絡似然比引入到概率假設密度濾波器,并針對實際應用中信噪比難以獲知的情況(因為統計信噪比需要大量源自目標的量測),通過在信噪比可能的取值范圍內對信噪比求邊緣積分以構造出近似的幅度似然函數。該文獻第1次在隨機有限集框架下采用目標幅度信息來改進多目標濾波性能。
上述文獻均假設背景雜波為高斯分布,對應的雜波幅度為Rayleigh分布。這是一種比較簡單通用的假設,但對于海雜波而言,Rayleigh分布的擬合性能在一些情況下并不理想,尤其是當海雜波的幅度分布存在較重的拖尾時,而K分布則能夠較好的擬合重拖尾的海雜波分布。在假設海雜波為K分布的前提下,Brekke等人[59]用仿真試驗定量分析了海上多目標跟蹤算法的性能損失。之后,他針對幅度信息輔助的PDAF在K分布海雜波條件下的性能估計問題,用修正的Riccati方程進行了預測[60]。Li等人[61]針對高分辨雷達和低擦地角引起雜波重拖尾的情況,假設雜波服從威布爾分布,提出一種幅度信息輔助的PHD濾波器。由于威布爾分布也能夠較好的擬合海雜波,因此這一方法也適用于海上多目標跟蹤場景。
5 多目標檢測前跟蹤方法
前面提到,目前大部分多目標跟蹤方法采用標準量測模型,即用于跟蹤的量測是經過檢測器處理后的數據,稱為點跡量測或檢測點跡。這種先檢測后跟蹤的處理方式對于降低系統的內存負擔和算法的計算成本具有重要意義。然而,對于低SCR的場景,檢測過程無疑會引起嚴重的信息損失,并導致跟蹤效果不理想。在這種情況下,需要盡量保留原始數據中的所有信息來提升跟蹤性能。檢測前跟蹤(Track-Before-Detect,TBD)就是直接對傳感器原始觀測數據進行跟蹤處理的一類算法的統稱,由于在跟蹤之前沒有經過門限檢測,數據中的信息得到了完整保留。
目前關于多目標TBD的方法比較多,包括基于動態規劃(Dynamic Programming,DP)的方法、基于粒子濾波的方法、基于直方圖概率多假設跟蹤器(Histogram Probabilistic MHT,H-PMHT)的方法以及基于隨機有限集的方法等。下面對這些方法分別進行簡要介紹。
5.1 多目標DP-TBD方法
Barniv在1980年代中期首次將DP算法應用于TBD中,并對DP-TBD的檢測性能進行了分析。1990年,Kramer首次將DP-TBD算法應用到機載雷達系統中,并實現了對信噪比低至5 dB的目標的檢測。2008年Buzzi等人[62]將DP-TBD應用于多目標場景,能夠估計出目標數目并回溯目標航跡。為解決目標數增加造成的維數災難和計算量爆炸的問題,Buzzi在推導該算法時假設目標的航跡相互之間不交叉,但在實際應用中這是一個很大的局限。2013年,Grossi等人[63]先是將多目標DP-TBD引入了雷達系統,隨后將Buzzi等人[62]提出的連續航跡消除(Successive Track Cancellation,STC)策略和易偉等人[64]提出的平行目標消除(Parallel Target Cancellation,PTC)策略引入TBD處理器[65],以提升多個目標相距較近時的跟蹤性能。DP-TBD采用的批處理方式容易導致運算效率降低,從而嚴重制約其在實際問題中的應用。針對這一問題,王經鶴等人[66]提出一種快速實現算法。此后,針對目標機動情況下所設運動模型與實際運動不匹配導致的算法性能下降問題,易偉等人[67]提出一種適用于機動目標的DP-TBD方法。
5.2 多目標PF-TBD方法
動態規劃這種離散化狀態空間的方法的一個典型不足是可能引起很大的計算負擔,并且很多計算由于傳遞的是分布函數的尾部等概率很小的部分而顯得意義不大。為解決這一問題,學者們提出了基于粒子濾波的TBD方法(PF-TBD)。最初的PFTBD方法是由Salmond和Boers各自獨立提出的,之后Rutten對PF-TBD進行了改進,使得濾波所需的粒子數更少,性能更優。2003年Boers等人[68]首次提出了針對多目標場景的PF-TBD方法,但目標狀態空間的維數會隨著目標數目的增加而急劇增大,即面臨維數災難問題。為解決這一問題,Orton等人[69]提出了一種目標獨立采樣的方法,將高維狀態空間分解為一維空間,并對每個空間分別采樣。隨后Kreucher等人[70]等采用這一方法對多目標PF-TBD進行了改進。由于文獻[70]中采用的獨立劃分粒子濾波方法在對每個目標采樣時沒有考慮周圍的目標,因此當目標相距較近時其性能嚴重下降。為克服這一缺陷,文獻[71]提出的平行劃分粒子濾波方法在采樣過程中包含了對周圍目標狀態的估計。易偉等人[72]提出的獨立聯合最優重要性密度(Independent Joint Optimal Importance Density,IJOID)在目標后驗密度獨立分布的假設下采用最優重要性密度(Optimal Importance Density,OID)對狀態空間進行采樣。同樣為解決維數災難問題,Medina等人[73]針對目標已知且恒定、同時目標相距較近的情形,提出一種結合輔助粒子濾波(Auxiliary Particle Filter,APF)和平行劃分策略的多目標TBD方法。
5.3 多目標H-PMHT-TBD方法
H-PMHT對TBD而言是一種獨特的方法[74]。它將傳感器圖像解釋為一個具有潛在混合密度的觀測數據的直方圖,將混合項的狀態通過一個運動模型聯系起來,并采用期望最大化(Expectation Maximization,EM)方法進行狀態估計。H-PMHT的一個優點是易于計算,這在很大程度上是因為它不采用似然比。Davey[75]對4種不同的TBD方法進行了仿真對比,證明H-PMHT實時性最優,之后他針對高斯非線性目標提出一種粒子近似的H-PMHT方法,針對非高斯非線性目標提出一種DP近似的H-PMHT方法。
5.4 多目標RFS-TBD方法
目前,在多目標TBD領域RFS被認為是最合適的方法。一方面,在3種主要的多目標跟蹤方法中,JPDA和MHT都是為數據關聯而設計的,由于無法直接利用原始測量數據進行數據關聯,它們難以應用于TBD場景,而RFS卻能夠通過引入TBD量測模型來處理原始測量數據;另一方面,為了緩解維數災難,多目標PF-TBD需要以目標后驗密度的獨立性作為前提,然而這一前提暗示了PF不再是漸進最優的。2005年,Punithakumar等人[76]首次將RFS方法應用于多目標TBD場景,但采用的PHD濾波器僅能得到目標濾波點跡,無法直接輸出航跡。為此,Lin等人[77]通過對PHD-TBD的輸出點跡進行關聯處理得到目標航跡,但這種方法計算量很大。2010年,Vo等人[10]在假設目標影響區域互相不重疊的條件下,采用圖像量測模型推導出基于MeMBer濾波器的TBD方法。該方法的性能在視頻跟蹤及雷達圖像目標檢測中得到了驗證。鑒于MeMBer-TBD也不能直接輸出目標航跡,Papi等人[78]將GLMB濾波器引入TBD,從而構成完整的基于TBD處理的多目標跟蹤器。但該方法對于軌跡相距較近的目標跟蹤效果并不理想。為解決這一問題,Garcia-Fernandez[79]通過基于MCMC的標簽交換策略來提升跟蹤器在多個目標長時間貼近運動時的跟蹤性能。上述幾種多目標TBD方法[10,79,80]是在目標影響區域不重疊(即目標統計獨立)的假設下得到的。針對目標影響區域重疊的情況,Mahler等人[81]推導了PHD和CPHD濾波器的精確濾波公式;之后,Papi等人[80]針對目標統計相關的情形,推導出一種計算簡便的GLMB近似密度來取代多目標后驗密度,并基于這一密度提出一種適應包括TBD模型以及疊加量測模型在內的廣義量測模型(Generic Observation Model,GOM)的GLMB濾波器。不同于Papi所采用的近似GLMB濾波器,李溯琪等人[82]提出一種適用于GOM的精確濾波器,該濾波器的更新方程不對多目標似然模型做任何近似或簡化假設。
國內從事RFS多目標TBD研究的單位主要有電子科技大學、清華大學、國防科技大學、西安電子科技大學等,所從事的研究涵蓋基礎濾波算法、機動目標跟蹤、MIMO雷達、高頻地波超視距雷達、紅外傳感器、多傳感器目標跟蹤等[64,66,67,82–88]。
針對海雜波環境下微弱目標的檢測和跟蹤問題,美國海軍研究實驗室的Farshchian等人[89]提出一種基于小波變換的TBD方法,在TBD處理之前采用兩種單元平均CFAR方法消除海雜波。加拿大防御研究和發展局的McDonald等人[90]采用海雜波實測數據研究了雜波模型不匹配給TBD算法造成的性能損失,并提出一種基于“雜波事件”的經驗方法來描述海雜波特性。意大利的Grossi等人[63]針對TBD中的航跡形成問題,提出一種新的動態規劃方法,不需要離散狀態空間,而是直接處理檢測點跡。之后,他們采用連續航跡消除策略提升多個目標鄰近時的算法性能[65],并通過實測數據處理證明他們提出的DP-TBD方法在消除海雜波方面非常高效。亞利桑那州立大學的Ebenezer等人[91]將多轉移模式TBD算法推廣應用于復合高斯海雜波中多個低可觀測目標的跟蹤,推導了廣義似然比和海雜波分布參數的最大似然估計。針對海上擴展目標的TBD問題,北約的Errasti-Alcala等人[92]指出經典擴展目標的量測模型忽略了對電磁波傳播過程中許多物理現象的描述,之后他們對經典模型進行了修正并采用實測數據驗證了新模型的適用性。針對K分布海雜波中目標起伏以及信雜比未知的情況,姜海超等人[93]提出一種知識輔助的DP-TBD算法,通過在積累過程中利用幅度信息以提升雷達的檢測性能。2017年,澳大利亞國防科學與技術組織的Berry等人[94]針對復合高斯海雜波環境提出一種貝葉斯TBD方法,采用局部化目標密度來最小化狀態空間維度,從而避免計算復雜的數據關聯問題。
6 多擴展目標跟蹤方法
近年來,隨著傳感器技術的快速發展,目標回波占據多個分辨單元的現象已經變得越來越普遍。當目標處于傳感器近場時,比如在移動機器人和自動駕駛等應用中,這一現象更加明顯。此時,常規多目標跟蹤方法所假設的標準測量模型已不再適用。這種特殊場景下的目標跟蹤問題引發了一個新的研究方向:擴展目標跟蹤(Extended Target Tracking,ETT)。一個擴展目標能夠從空間分布的多個量測源(也稱為反射點)產生多個帶有噪聲的量測,并且量測的數目是變化的。此外,擴展目標的形狀是未知的,并且可能也是隨時間變化的。ETT的目的是同時估計出擴展目標的運動狀態和形狀。
在許多實際應用中需要對多個擴展目標進行跟蹤。此時,擴展目標量測與擴展目標狀態之間的關聯是未知的。對于多個擴展目標的跟蹤問題,數據關聯甚至比擴展目標跟蹤本身更加難以處理。這是因為量測的大量增加導致有太多的關聯可能性,必須窮舉量測集的所有劃分方式,并在各種可能的劃分下采用多目標跟蹤方法估計目標狀態。
1980年代末期,Drummond發表了關于ETT的最初研究成果。2004年,Waxman和Drummond等學者對當時的群/擴展目標跟蹤方面的研究成果進行了一番梳理。從那時起,單個擴展目標的形狀估計以及多擴展目標跟蹤技術都取得了巨大進步。2005年,Gilholm等人[95]提出了針對擴展/群目標的泊松分布模型。2009年,Mahler[9]在這一模型假設下推導了用于擴展目標跟蹤的PHD(ET-PHD)濾波器,但是并沒有給出具體的實現步驟。2010年,Granstr?m等人[96]分別針對線性/非線性運動模型和量測模型給出了ET-PHD濾波器的高斯混合實現(ET-GM-PHD)。在此之前,Clark等人[97]提出了基于點目標GM-PHD濾波器的群目標跟蹤方法。但是,這些方法都只能估計擴展目標質心的運動狀態,而不能估計出目標形狀。2008年,Koch[98]提出的隨機矩陣(Random Matrices,RM)模型和2009年Baum等學者[99,100]提出的隨機超球面(Random Hypersurface Model,RHM)模型為實現擴展目標形狀估計奠定了理論基礎。之后,Granstr?m[101,102]在PHD框架下采用高斯逆威沙特(Gaussian Inverse Wishart,GIW)分布推導了基于RM模型的ET-GIWPHD濾波器,Zhang等人[103]采用RHM模型推導了一種擴展目標PHD(ET-RHM-PHD)濾波器。為了提升擴展目標跟蹤效果,2013年,Granstr?m等學者[104,105]同時采用矩形、竿形等多種形狀模型對汽車和自行車進行了跟蹤。針對擴展目標量測率未知的問題,Granstr?m等人[106]提出采用Gamma分布遞歸估計每個目標的泊松量測率,從而將擴展目標的運動狀態和形狀估計問題變為伽馬高斯逆威沙特(Gamma Gaussian Inverse Wishart,GGIW)分布參數的估計問題。不同于Gilholm等人[95]采用的泊松點過程(Poisson Point Process,PPP)模型,Swain等人[107,108]將目標建模為包含父過程和子過程的2級過程,其中父過程建模目標數目的泊松分布,而對于每個目標,利用子過程來建模產生量測的散射點。為了實現對目標數目的更準確估計,Lian等學者[109]提出了用于擴展目標的CPHD濾波器。但是,這一算法假設的目標不能相距太近以及雜波密度不能太高等條件限制了它在一般場景下的應用。之后,Lundquist等人[110]提出了假設條件相對寬松的擴展目標CPHD濾波器,能夠處理目標鄰近和雜波密集的場景,并給出了算法的GGIW實現形式(GGIWCPHD)。由于PHD/CPHD濾波器無法輸出目標航跡,2015年,Beard等學者[111]將GLMB引入擴展目標跟蹤領域,提出了GGIW-GLMB跟蹤算法,從而實現了擴展目標航跡的識別和管理。
目前,在多目標跟蹤領域存在兩種共軛先驗,一種是基于標簽RFS的δ-GLMB密度,一種是基于泊松多伯努利RFS的泊松多伯努利混合(Poisson Multi-Bernoulli Mixture,PMBM)密度[112]。PMBM共軛先驗允許將目標集合劃分為兩個不相交的子集:檢測目標集和漏檢目標集。Fernández等人[113]對這兩種共軛先驗進行了研究,指出PMBM密度比δ-GLMB密度具有更加有效的結構以及更少的假設。最近,Granstr?m等人[114]基于PPP量測模型推導了用于多擴展目標跟蹤的PMBM共軛先驗,并提出了一種易于計算的GGIW實現算法,稱為GGIW-PMBM。此外,在非隨機集多擴展目標跟蹤方面,Carmi等人[115]提出一種高斯混合MCMC濾波器,Wieneke等人[116]結合隨機矩陣模型提出了采用PMHT的跟蹤方法。
目前,國內從事擴展目標跟蹤研究的單位有深圳大學、杭州電子科技大學、西安電子科技大學、蘭州理工大學、江南大學等,分別從擴展目標的關聯、濾波、建模、分類和航跡管理等方面進行了深入研究[117–124]。
隨著對海探測雷達分辨率的提高,海上目標更容易呈現出擴展特性,因此對海上擴展目標跟蹤方法的研究具有重要的意義。在這方面,北約科學技術組織下屬的海上研究和實驗中心的Vivone和Errasti-Alcala等人發表了許多成果,他們立足于搭建在意大利拉斯佩齊亞軍港的一部X波段對海探測雷達進行了大量擴展目標跟蹤算法的實驗。本文根據公開發表的文獻將他們的研究成果簡要介紹如下:(1)針對海上擴展目標的TBD問題,考慮了電磁波傳播過程中的多種實際物理現象,對經典擴展目標模型進行了修正[92];(2)由于雷達量測往往是極坐標值,而目標運動模型通常采用笛卡爾坐標值,為此采用1階泰勒展開方法對擴展目標非線性函數進行線性化,并推導了一種轉換量測ETT濾波器,與ET-GIW-PHD濾波器相結合用于擴展目標跟蹤[125,126];(3)建立了針對ETT的整個信號處理鏈路,其主要技術是采用8-連通聚類方法提取每個擴展目標的多個點跡,并采用JPDA濾波器進行跟蹤[127]。此外,為實現對海上擴展目標的更準確跟蹤,法國泰勒斯公司的Magnant等人[128]提出一種擴展目標聯合跟蹤和分類方法,通過分類可以采用更加適合目標的運動模型。大連海事大學的Zhou等人[129]基于特征學習方法提出了用于擴展目標跟蹤的多重核化相關濾波器,并采用X波段雷達實測數據進行了驗證。
7 總結與展望
海上多目標跟蹤是雷達多目標跟蹤技術的一個重要應用場景。在當前日益嚴峻的海上安全形勢下,加強對海上多目標跟蹤技術的研究,實現更加準確、高效的海上態勢感知具有十分重要的現實意義。但相比一般場景,海上多目標跟蹤面臨的挑戰更大:一是復雜多變的海洋環境以及較弱的目標信號特征使得海上小目標檢測性能下降,繼而給后續多目標跟蹤造成很大困難;二是目標的編隊運動以及高分辨率雷達探測引起的量測擴展特性使得傳統的跟蹤方法難以應用。目前,專門研究海洋環境下多目標跟蹤問題的文獻還比較少,且大都側重于單一問題,缺乏綜合考慮。為此,本文在系統梳理已有文獻的基礎上,從常規多目標跟蹤方法、幅度信息輔助的多目標跟蹤方法、多目標檢測前跟蹤方法以及多擴展目標跟蹤方法等四個方面對海上多目標跟蹤技術的研究進展進行了歸納總結。
從海上多目標跟蹤技術的發展來看,這一領域的研究已取得一定成果;但結合工程實際應用來看,需要解決的問題還有很多,這里我們給出以下幾點思考:
(1) 在常規多目標跟蹤方法中,RFS以其近乎完美的理論框架逐漸成為多目標跟蹤領域的主要研究方法,尤其是GLMB濾波器及其衍生方法備受國內外學者青睞。但是,RFS方法得以實現的前提如雜波數服從泊松分布且雜波在空間上均勻分布以及檢測概率獨立于目標狀態且相對穩定等條件限制了它在海上多目標跟蹤方面的應用。目前,雖已有學者針對雜波非泊松非均勻分布[21–23]、檢測概率依賴于目標狀態[21,24]等情況進行了研究,但大都設置了比較嚴格的限定條件以便于理論分析。針對海雜波的時空分布特征以及目標隨機起伏導致檢測概率變化的情況而開展的研究還很少。
(2) 對于幅度信息輔助的目標跟蹤方法,一個重要的前提是雜波和目標的幅度分布特征已知。由于海雜波的分布情況受海況、雷達的極化方式與工作頻率等諸多因素影響而呈現明顯的非高斯、非線性和非平穩特性,因此對海雜波分布的精確建模非常困難。而如果假定的分布模型與實際的海雜波分布不匹配,算法的跟蹤性能將明顯下降。目前已有學者針對Rayleigh雜波下未知信雜比的情況進行研究[58],但沒有考慮海雜波的情況。如何在海雜波分布參數未知的情況下有效地利用幅度信息以提升目標點跡與雜波的辨識度是今后的一個研究重點。
(3) 檢測前跟蹤方法的實現依賴于目標量測的非相參積累,而對積累路徑(目標后驗密度)的準確描述是實現這一過程的關鍵。目前,針對勻速直線運動目標,積累的效果比較好,而針對機動目標和大測量誤差的情況仍然不理想。此外,強海雜波也會對算法性能造成嚴重干擾,這是由于雜波的幅度高,似然比就高,從而使算法誤將雜波認作目標,導致錯誤的檢測和跟蹤。目前,一種可能的解決辦法是在傳統TBD框架內采用粒子流等高精度濾波器[130,131],通過粒子流實現精確的狀態估計,并通過TBD框架實現更好的量測積累。但是,粒子流本身在理論上和實現上還有許多不完善之處,需要繼續深入研究。
(4) 多擴展目標跟蹤是一種比較特殊的跟蹤方法:由于每個目標會產生多個量測,勢必要對目標的量測進行劃分。目前的算法大都采用遍歷所有劃分組合的方式以保證可靠性。但是,當雜波密度較高、目標間距較近、目標的形狀和尺寸變化以及目標機動時,量測劃分的效果仍然不夠好。尤其是在海洋條件下,強海雜波會對量測劃分造成干擾,如果雜波被劃入目標單元,就會嚴重影響算法的狀態估計和形狀估計性能。因此,針對海上擴展目標的實際形態進行深入研究,以探索更加符合實際應用的多擴展目標跟蹤方法,是今后的一個重點方向。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56