河湖水生態(tài)信息監(jiān)測(cè)智能無人船的應(yīng)用研究
2021-03-03 07:05:16邢方亮王天奕郭澤斌
廣東水利水電 2021年2期
關(guān)鍵詞:智能
邢方亮,王天奕,王 磊,陳 俊,郭澤斌
(珠江水利委員會(huì)珠江水利科學(xué)研究院,廣東 廣州 510611)
1 概述
河湖監(jiān)管問題多、處理難、任務(wù)重,靠人工巡查、定期采樣檢測(cè)等方式,監(jiān)管難度大、效率低,難以及時(shí)高效發(fā)現(xiàn)和排查問題。河湖監(jiān)管現(xiàn)有的人工或監(jiān)測(cè)站點(diǎn)建設(shè)成本高、監(jiān)測(cè)范圍有限、覆蓋面不全等問題,與國(guó)外歐美發(fā)達(dá)國(guó)家相比仍有明顯的差距。水利部多次提出提高河湖水生態(tài)管理智能化水平[1],科學(xué)布設(shè)監(jiān)測(cè)站點(diǎn),利用無人船等技術(shù)手段實(shí)現(xiàn)動(dòng)態(tài)監(jiān)管,能及時(shí)掌握河湖水域變化情況,對(duì)河湖管理具有重要意義[2]。
研究推廣基于物聯(lián)網(wǎng)技術(shù)的河湖水生態(tài)信息監(jiān)測(cè)智能無人船,可以實(shí)時(shí)動(dòng)態(tài)采集水質(zhì)、流速流量、水深、污染源分布等信息[3],實(shí)現(xiàn)從點(diǎn)源到面源的數(shù)據(jù)監(jiān)測(cè),有效彌補(bǔ)了現(xiàn)有監(jiān)測(cè)手段“覆蓋面不全,建設(shè)成本巨大”等不足之處[4],推進(jìn)生態(tài)環(huán)境保護(hù)督查執(zhí)法,為各地污染防治、打響環(huán)境保護(hù)攻堅(jiān)戰(zhàn)和河湖長(zhǎng)制提供科學(xué)有效的技術(shù)支撐,對(duì)深入落實(shí)新時(shí)期十六字的治水方針,對(duì)“補(bǔ)短板、強(qiáng)監(jiān)管”總基調(diào)的縱向發(fā)展起到推動(dòng)作用,加速水利治理體系和能力向現(xiàn)代化轉(zhuǎn)變,對(duì)建設(shè)人民的幸福河湖也具有深遠(yuǎn)意義。
2 智能無人船系統(tǒng)設(shè)計(jì)方案
2.1 系統(tǒng)功能
智能無人船能夠適用于湖泊、城市河道水域,靈活性高,檢測(cè)要素多且精度高,并能夠?qū)崿F(xiàn)自主巡航避障和遠(yuǎn)程監(jiān)控的水生態(tài)監(jiān)測(cè)無人船[5]。根據(jù)以上需求,提出如下設(shè)計(jì)要求及功能。
1) 船體設(shè)計(jì)
采用小型模塊化船體,適用于湖泊、河道狹窄水道航行,具有吃水淺、轉(zhuǎn)向靈活等優(yōu)勢(shì),提高在狹窄水道與淺水溝渠的適航能力[6]。
2) 續(xù)航能力
主要采用鋰電池蓄電,同時(shí)使用薄膜太陽能發(fā)電裝置,為無人船與船載設(shè)備提供所需能源和動(dòng)力,以上系統(tǒng)可保證無人船至少5 h的續(xù)航能力。
3) 自主航行控制功能
不受時(shí)間和氣候影響,在水面進(jìn)行不間斷的智能作業(yè),實(shí)現(xiàn)智能導(dǎo)航技術(shù)與航跡規(guī)劃相結(jié)合,既可在無人工設(shè)定的情況下自主設(shè)置采樣路線及自動(dòng)導(dǎo)航,也可遙控?zé)o人船和根據(jù)預(yù)設(shè)的航跡規(guī)劃執(zhí)行航行測(cè)量。
4) 監(jiān)測(cè)及取樣功能
無人船平臺(tái)預(yù)留大量監(jiān)控接口,方便搭載和集成采樣系統(tǒng)、多參數(shù)水質(zhì)在線分析儀、水文傳感器等設(shè)備,可根據(jù)監(jiān)測(cè)要求進(jìn)行設(shè)計(jì),水溫誤差≤0.5℃,溶解氧誤差≤0.1 mg/L,電導(dǎo)率誤差≤10 us/cm,氨氮誤差≤0.05 mg/L,濁度誤差≤0.5 NTU,酸堿度誤差≤0.1 pH進(jìn)行多樣化采集。具有水體取樣功能,可以將水樣儲(chǔ)存帶回分析處理。
5) 智能監(jiān)控軟件
基于云計(jì)算平臺(tái)的服務(wù)器,提供界面友好的控制軟件[7],讓用戶操作無人船前往目標(biāo)水域開展相關(guān)水質(zhì)采樣更加方便快捷,同時(shí)能夠把數(shù)據(jù)進(jìn)行可視化顯示并保存,讓用戶在后續(xù)工作中查看分析數(shù)據(jù)更加直觀便捷,為河湖管理、決策分析提供全方位智能化辦公手段。
2.2 系統(tǒng)總體設(shè)計(jì)
系統(tǒng)由移動(dòng)監(jiān)控平臺(tái)(無人船)、手動(dòng)控制終端和監(jiān)控中心3個(gè)部分組成,融合了機(jī)械、電子、通信、網(wǎng)絡(luò)和軟件等多方面專業(yè)技術(shù)內(nèi)容[8],其系統(tǒng)總體結(jié)構(gòu)如圖1所示。
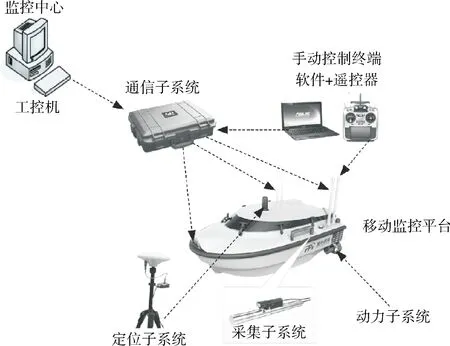
圖1 系統(tǒng)總體框示意
移動(dòng)監(jiān)控平臺(tái)以船體為載體,具有與體積小、成本低、改造性強(qiáng)等優(yōu)點(diǎn),通過機(jī)械加工和固定,將研發(fā)的中央控制板安裝在船體上面,其中主要由中央處理芯片、電源模塊、各個(gè)功能模塊組成。移動(dòng)監(jiān)控平臺(tái)的模塊組成如圖2所示。
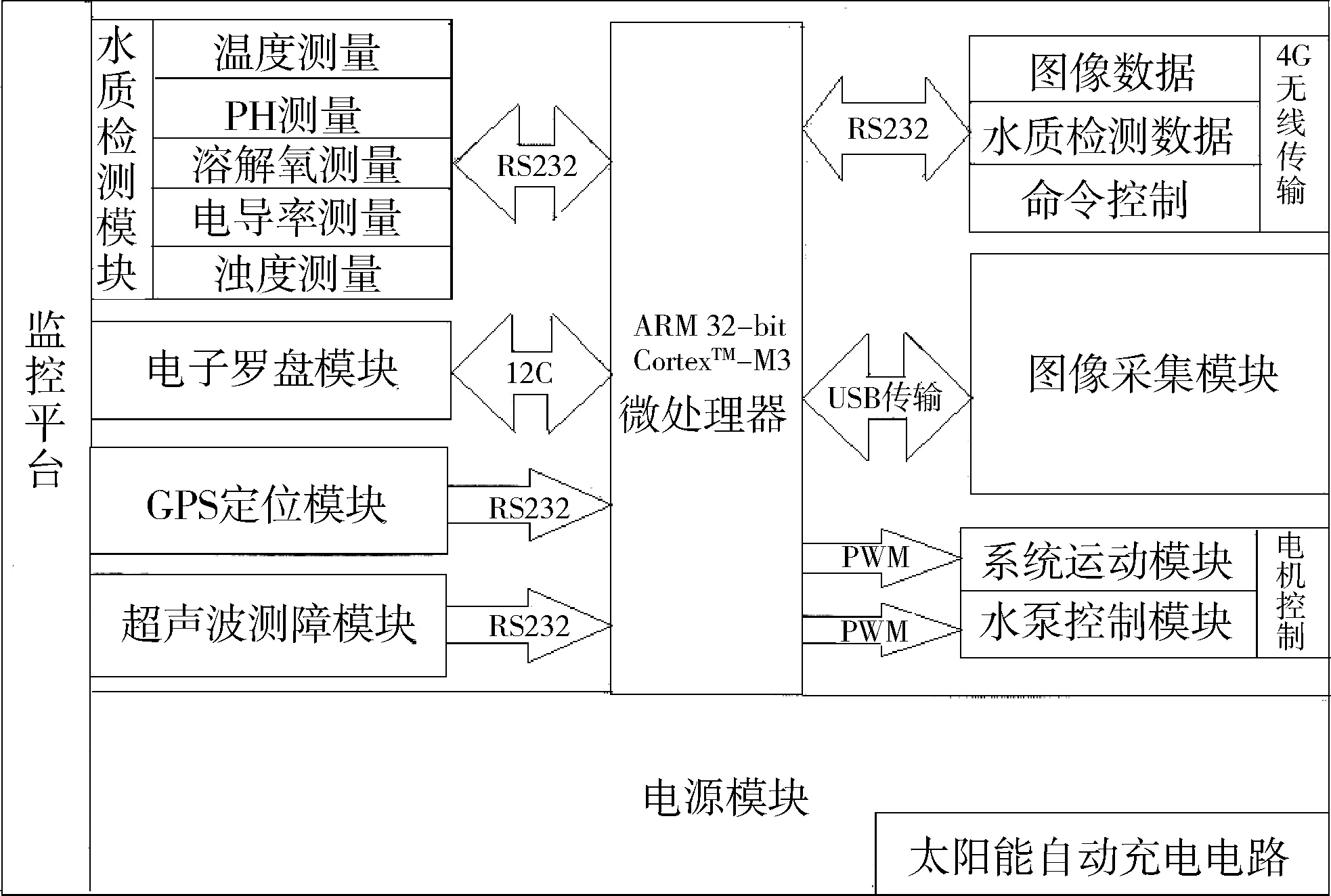
圖2 移動(dòng)監(jiān)控平臺(tái)組成示意
3 系統(tǒng)硬件設(shè)計(jì)與實(shí)現(xiàn)
3.1 船體
智能無人船采用小水線面雙體船,有效的減小航行阻力,提高航行速度和抗浪性,增強(qiáng)航行穩(wěn)定性和負(fù)載能力。船體可快速拆裝,方便運(yùn)輸,四周安裝有防撞條,且浮體內(nèi)充滿發(fā)泡材料,有效提高船體的抗撞性和抗沉性(如圖3所示)。
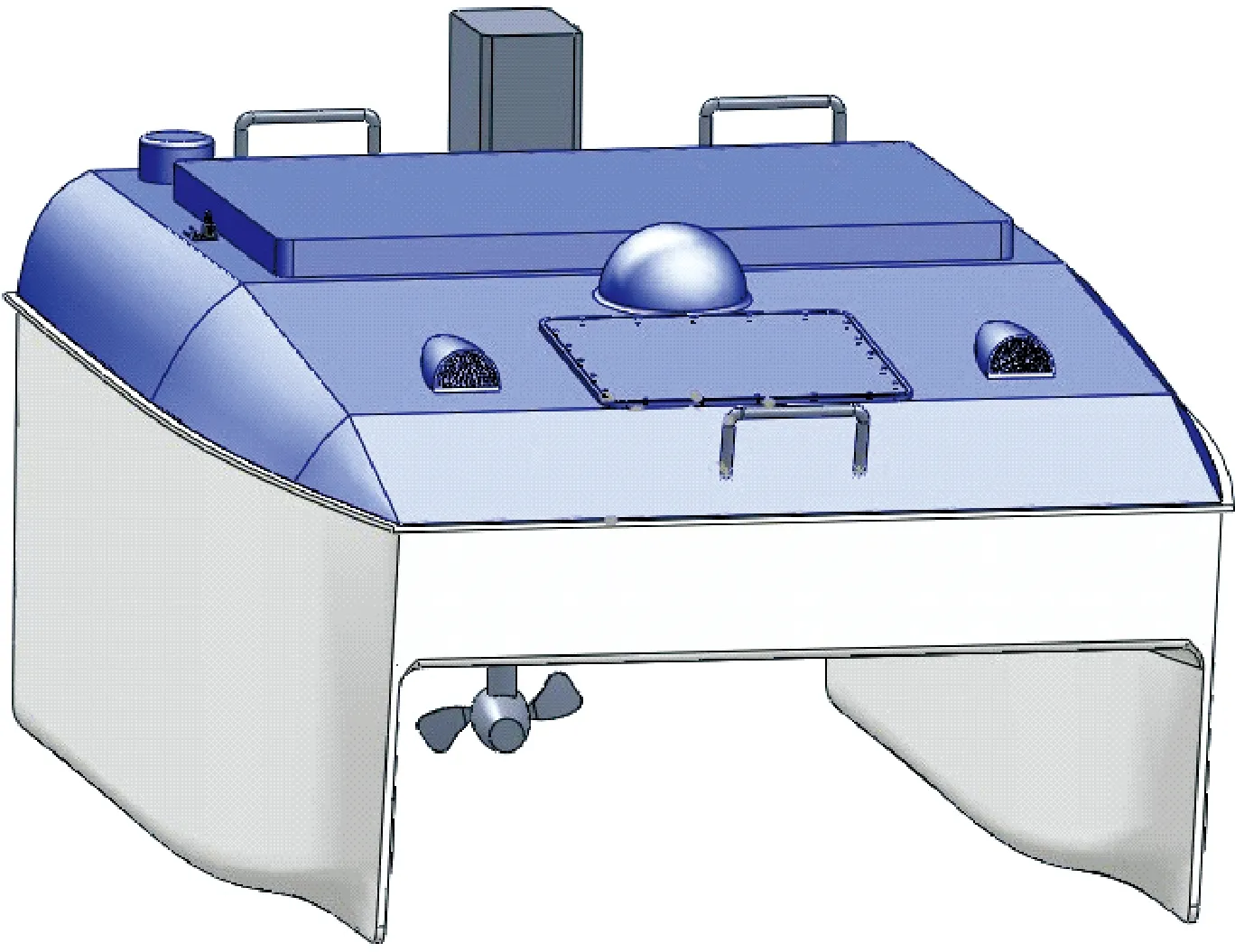
圖3 船體設(shè)計(jì)示意
3.2 中央控制板
中央控制板是整個(gè)無人測(cè)控船的大腦,需要中央處理芯片與各功能模塊進(jìn)行實(shí)時(shí)交互,以滿足對(duì)實(shí)時(shí)數(shù)據(jù)的處理、足夠的抗干擾能力。因此,本設(shè)計(jì)選用基于ARM內(nèi)核的16/32位微處理器STM32F103作為無人船的中央處理芯片。該芯片運(yùn)行速率高達(dá)72 MHz,滿足了中央控制板高速處理數(shù)據(jù)的要求;多達(dá)5個(gè)USART接口、21路AD接口、3個(gè)SPI接口以及其他通信接口滿足了多種傳感器接入的需求;片內(nèi)集成的Flash和SRAM,滿足了嵌入式系統(tǒng)移植的需要,同時(shí)帶有豐富的存儲(chǔ)器外擴(kuò)接口,方便存儲(chǔ)器的外擴(kuò);嵌套式中斷向量控制器(NVIC),支持多達(dá)60個(gè)向量中斷,滿足了中央控制板對(duì)控制信號(hào)實(shí)時(shí)響應(yīng)的要求;112個(gè)通用I/O管腳,帶可編程的上拉/下拉電阻,滿足了與多種傳感器接口連接的需要;11個(gè)通用定時(shí)器/計(jì)數(shù)器,帶8路捕獲輸入和10路比較輸出。滿足了推進(jìn)器、舵機(jī)等部件的控制需要。
3.3 電源管理模塊
電源管理模塊設(shè)計(jì)保障整個(gè)無人船電源的供應(yīng)和控制。電源選用2塊12 V 10 AH的鋰電池供電,可提供瞬時(shí)60 A的電流,每塊電池的重量?jī)H0.8 kg,目前可實(shí)現(xiàn)5 h的續(xù)航。為滿足不同傳感器工作電壓的需求,電源管理模塊將電壓分別轉(zhuǎn)換為3.3 V、5.0 V、9.0 V和24 V,為減少功耗,設(shè)置了多個(gè)電子開關(guān),關(guān)閉暫時(shí)不用的傳感器電源。
3.4 運(yùn)動(dòng)控制模塊
無人船的水下推進(jìn)裝置是整個(gè)系統(tǒng)研發(fā)的重點(diǎn),其部件選擇的好壞,直接關(guān)系到整個(gè)系統(tǒng)研制的成敗。采用舵機(jī)+連桿+軸承的轉(zhuǎn)向裝置(如圖4所示)。推力大小可調(diào)節(jié),可以實(shí)現(xiàn)推進(jìn)電機(jī)正反轉(zhuǎn),采用脈寬調(diào)制技術(shù)控制電調(diào)調(diào)整電壓輸出以實(shí)現(xiàn)電機(jī)轉(zhuǎn)速和轉(zhuǎn)向的調(diào)節(jié),進(jìn)而調(diào)節(jié)推力的大小和方向[9]。
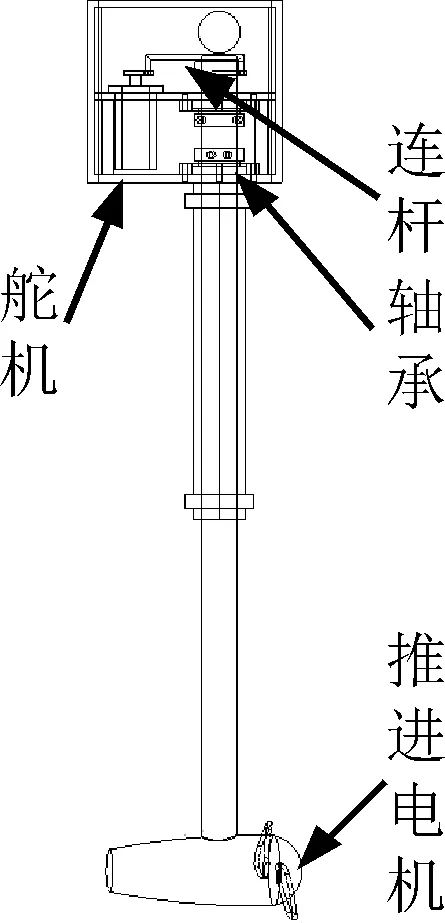
圖4 運(yùn)動(dòng)控制模塊剖面示意
3.5 水質(zhì)監(jiān)測(cè)模塊
設(shè)計(jì)的數(shù)據(jù)在線采集系統(tǒng)采用STM32作為主控制器,實(shí)現(xiàn)控制各個(gè)傳感器的數(shù)據(jù)采集和處理。由于使用的溫度傳感器、pH傳感器、溶解氧傳感器、電導(dǎo)率傳感器和濁度傳感器等儀器均使用RS232協(xié)議通信,構(gòu)成了一個(gè)RS232通信協(xié)議的通信網(wǎng)絡(luò)。
3.6 圖像采集模塊
該模塊主要由網(wǎng)域4K高清攝像頭和5G模塊等組成。該模塊服務(wù)于無人船所在水域環(huán)境的監(jiān)測(cè)工作,能夠?qū)崟r(shí)識(shí)別障礙物,同時(shí)配合主控裝置共同工作,從而實(shí)現(xiàn)自動(dòng)避障功能。捕獲的水域面上圖像可通過5G網(wǎng)絡(luò)傳輸?shù)絇C端,能夠?qū)崿F(xiàn)監(jiān)視控制中心對(duì)水域環(huán)境的遠(yuǎn)程監(jiān)控。
3.7 超聲波測(cè)距模塊
設(shè)計(jì)測(cè)量距離可達(dá)10 m,采用的超聲波探測(cè)夾角只有15°,與大多數(shù)的超聲波是60°不同,可以提高超聲波測(cè)量角度分辨率,是無人船等應(yīng)用領(lǐng)域避障導(dǎo)航方案的首選。
4 系統(tǒng)軟件設(shè)計(jì)與實(shí)現(xiàn)
4.1 中央控制板
中央控制板的軟件包括以下幾個(gè)部分:實(shí)時(shí)多任務(wù)嵌入式操作系統(tǒng)uCOS-Ⅱ的移植、外圍接口驅(qū)動(dòng)成序的開發(fā)以及無人船運(yùn)動(dòng)控制程序的開發(fā)。無人船運(yùn)動(dòng)控制程序又分成兩部分:控制任務(wù)和通信任務(wù),其結(jié)構(gòu)如圖5所示。
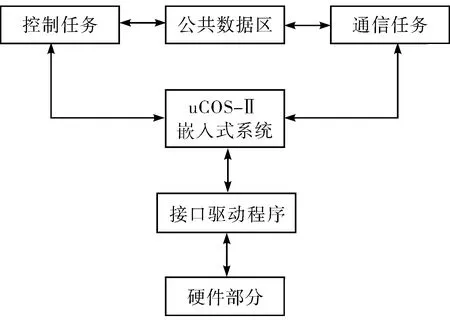
圖5 中央控制板軟件結(jié)構(gòu)
1) 控制任務(wù)
主要功能包括:外圍傳感器信息的獲取、無人船狀態(tài)檢測(cè)及報(bào)警、無人船運(yùn)行控制算法的運(yùn)算、推進(jìn)系統(tǒng)的控制、水下地形的測(cè)量、數(shù)據(jù)的處理和存儲(chǔ)。
對(duì)于無人船這樣的非線性、時(shí)變系統(tǒng),采用的控制方法主要是神經(jīng)網(wǎng)絡(luò)和模糊邏輯控制等。本設(shè)計(jì)采用簡(jiǎn)單實(shí)用的S面控制算法, 此方法將模糊控制的思想與PID的簡(jiǎn)單控制結(jié)構(gòu)相結(jié)合。
2) 通信任務(wù)
通信任務(wù)負(fù)責(zé)無人船通過無線通信模塊與手動(dòng)控制終端或監(jiān)控中心進(jìn)行數(shù)據(jù)與指令的交互,主要完成以下功能:無線通信的初始化和通信鏈路維護(hù)、數(shù)據(jù)的接收和處理、公用數(shù)據(jù)區(qū)要發(fā)送數(shù)據(jù)的處理與發(fā)送。
4.2 系統(tǒng)監(jiān)控軟件
為了更好的控制無人船對(duì)水樣進(jìn)行采集,設(shè)計(jì)了一個(gè)能實(shí)時(shí)操作、穩(wěn)定性好、交互界面友好的無人船操作軟件。該軟件采用C#語言編寫,在VS2019環(huán)境下編譯完成。此環(huán)境集成了大量實(shí)用的類庫,高效地實(shí)現(xiàn)了無人船數(shù)據(jù)的實(shí)時(shí)讀取和顯示(如圖6所示)。
5 關(guān)鍵技術(shù)及創(chuàng)新點(diǎn)
1) 基于高精度定位的無人船自動(dòng)避障智能導(dǎo)航技術(shù)
啟用智能導(dǎo)航技術(shù)與航跡規(guī)劃相結(jié)合,既可在無人工設(shè)定的情況下自主設(shè)置采樣路線及自動(dòng)導(dǎo)航,也可遙控?zé)o人船和根據(jù)預(yù)設(shè)的航跡規(guī)劃執(zhí)行航行測(cè)量,替代人力作業(yè),提高效率與精度。船體定位與姿態(tài)測(cè)量采用差分GPS[10]、三維電子羅盤、AHRS姿態(tài)傳感器相融合算法,不依賴于國(guó)家固定基站,定位精度小于0.02 m,當(dāng)船體在小范圍進(jìn)行旋轉(zhuǎn)運(yùn)動(dòng)時(shí),通過三維電子羅盤仍可精確定位船體及航向[11]。船體采用模塊化設(shè)計(jì),可擴(kuò)展性強(qiáng),具有自動(dòng)漏水檢測(cè)、超聲波自動(dòng)避障等功能,在復(fù)雜水面可以暢通無阻,尤其是在浪比較大情況下,保持相對(duì)更穩(wěn)定的航行,能獲得高質(zhì)量的測(cè)量數(shù)據(jù)。
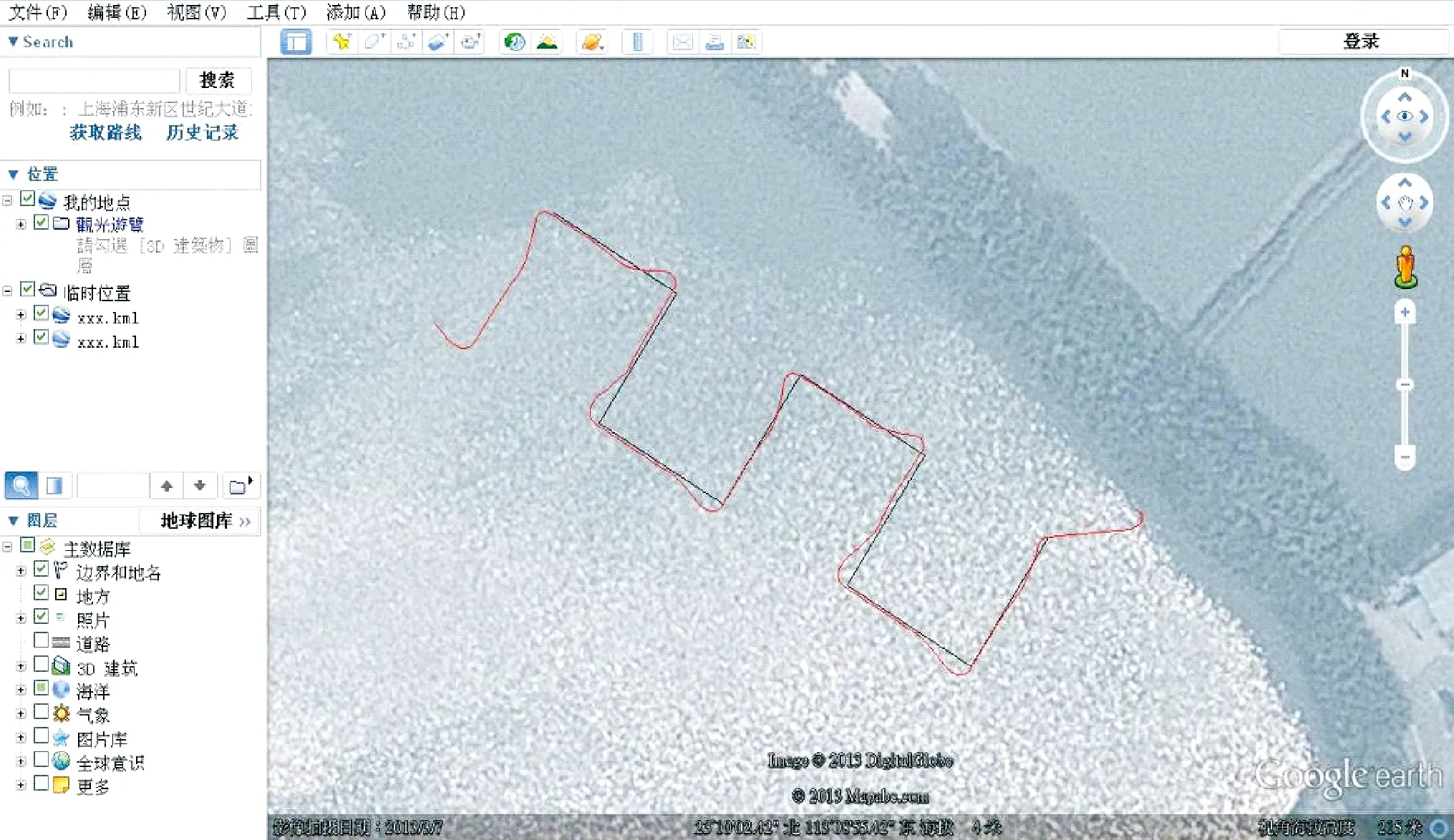
圖6 軟件界面示意
2) 水生態(tài)信息多要素實(shí)時(shí)在線監(jiān)測(cè)技術(shù)
無人船采集水體的圖像信息,基于圖像識(shí)別算法使無人船具備識(shí)別分析水體顏色及水體漂浮物密度等信息,可記錄及拍攝水質(zhì)采樣監(jiān)測(cè)的時(shí)間、地點(diǎn),對(duì)采樣和監(jiān)測(cè)數(shù)據(jù)進(jìn)行存儲(chǔ)、處理,并且為運(yùn)動(dòng)避障和污染源取證提供智能輔助及判斷。無人船平臺(tái)可以搭載和集成采樣系統(tǒng)、多參數(shù)水質(zhì)在線分析儀、水文傳感器和水生生物全息顯微觀測(cè)系統(tǒng)在無人船平臺(tái)上使用,實(shí)現(xiàn)水樣采集、水質(zhì)等水生態(tài)信息的實(shí)時(shí)監(jiān)測(cè),同時(shí)實(shí)時(shí)測(cè)量船體的俯仰角和橫滾角,并能輸出波高數(shù)據(jù),進(jìn)而有效修正監(jiān)測(cè)數(shù)據(jù),提高測(cè)量精度,實(shí)現(xiàn)精準(zhǔn)智能的水生態(tài)多要素實(shí)時(shí)監(jiān)測(cè)。
3) 實(shí)時(shí)獲取被監(jiān)測(cè)數(shù)據(jù)
借助云計(jì)算、大數(shù)據(jù)技術(shù)對(duì)水質(zhì)、水文等進(jìn)行分析,通過圖形化組態(tài)軟件,實(shí)現(xiàn)數(shù)據(jù)可視化和預(yù)警預(yù)報(bào)。
6 結(jié)語
無人船技術(shù)助力河湖監(jiān)管與保護(hù),搭載多種功能的采集與分析儀器設(shè)備[12],具備自主規(guī)劃、自動(dòng)導(dǎo)航、環(huán)境感知、智能避障、遠(yuǎn)距離通信、模式識(shí)別、視頻實(shí)時(shí)傳輸和網(wǎng)絡(luò)化監(jiān)控等功能,實(shí)時(shí)傳輸水文水質(zhì)等監(jiān)測(cè)數(shù)據(jù)至云服務(wù)器,為水污染防治及河湖強(qiáng)監(jiān)管提供有力的數(shù)據(jù)支撐,是河湖水生態(tài)科學(xué)管控、智慧管理、高效運(yùn)行的技術(shù)支撐和保障手段。
隨著科學(xué)技術(shù)不斷的發(fā)展,不斷地改進(jìn)智能無人船技術(shù)和質(zhì)量,進(jìn)一步加強(qiáng)模塊化設(shè)計(jì)功能,擴(kuò)展更多更復(fù)雜的傳感器進(jìn)行更加細(xì)致的河湖水生態(tài)信息監(jiān)測(cè),為河湖強(qiáng)監(jiān)管發(fā)揮越來越大的作用。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學(xué)科學(xué)(學(xué)生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(shù)(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
