節能控制的智能化路燈系統設計研究
2021-02-28 06:49:32漯河市路燈維護中心
電子世界 2021年22期
漯河市路燈維護中心 李 倩
國內現階段開展的路燈管理工作大多依靠人工巡視來實現,工作效率低下的同時產生不必要的人力、物力成本支出,本文針對此類問題提出了應用GPRS與ZigBee無線通信技術進行路燈遠程控制的管理模式,對于成本節約、提質增效、節能管理等目標的實現具有積極意義。同時,對于夜間恒照度造成的電能損耗問題,本文提出分時控制的路燈控制模式,結合雷達測速儀進行單燈控制,并依靠測距儀進行車輛方向的判斷,有效解決了傳統路燈系統在能源損耗方面的問題。
當前國內路燈所采取的照明模式大多為恒照度、全夜燈,通過定時啟停、感光啟停等方式對全部路燈進行集中管理。然而,現有的路燈控制系統無法做到遠程自動監控,往往需要安排人員現場對路燈進行巡視維護,所應用的計劃修模式往往會耗費較多人力和物力資源,相對于實時自動化監控系統存在較多缺點。此外,恒照度、全夜燈模式提供的照明存在冗余問題,往往只滿足了少量車輛或行人的通行需求,產生了較多不必要的電能支出。為此,相關單位需要積極研究節能控制的智能化路燈系統,實現安全運行以及節能控制的工作目標。
1 基于節能控制的智能化路燈系統的結構設計
1.1 無線通信設計
為了實現對現有路燈狀態的實時監控,智能路燈設計人員首先需要做好通信系統的規劃設計工作。相對而言,有線通信系統需要耗費較多時間和資金進行電纜敷設,期間還會對道路交通造成影響,而無線通信在達成設計目標的同時也可以減少施工成本。為了確保無線通信系統的穩定運行,通信系統中需要合理應用相應的通訊技術,本設計擬采用短距離通信的ZigBee技術和遠距離通信的GPRS技術,將兩者技術融合應用到智能路燈的通信系統中,使系統變得更加靈活可靠。
ZigBee是現有短距離通信技術中應用較為廣泛的技術類型,在路燈通信方面已推出較多研究成果,該技術10.75m的傳輸距離與城市路燈的布置間距相適應,符合數據傳輸方面的現實需求。然而,城市路燈數量相對較多,隨著道路長度的增加,ZigBee連接的路燈數量將會增加,這將影響無線通信系統的傳輸效率。為此,本文決定在ZigBee技術的基礎上應用GPRS技術,使得路燈的無線通信系統擺脫路燈數目、傳輸距離方面的限制,基于GPRS建立監控終端與各子網之間的通信鏈接,而子網內部則依靠ZigBee進行相應的數據交換,從而實現監控終端對路燈狀態的實時監控,也為各項路燈控制命令的下達提供便利。
1.2 智能控制終端
智能控制終端內部包括了控制器、光傳感器、驅動電路幾部分,控制終端信號的流動方向如圖1所示。
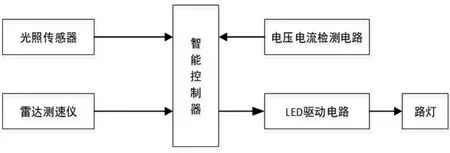
圖1 智能控制器信號流程圖
在智能路燈系統中,光照傳感器布設于道路周邊,用于實時監測道路區域的光信號,并將信號傳遞給智能控制器,經過內部控制回路的判斷來決定是否控制驅動電路對路燈進行開啟。在開啟路燈的同時,系統內部的計時器將會啟動,在達到定時時限后將會自動降低LED路燈的亮度。此時,如果駛入路燈所處道路區域,系統中的測速儀將會采集車輛信號并傳遞給智能控制器,系統將會自動控制路燈開啟,為車輛提供200m范圍的路燈照明,測速儀產生的速度信號將會由控制器內部算法計算得出每一個路燈的點亮與變暗延遲時間,使得路燈在滿足車輛行駛照明需求的同時避免因長時間維持高亮度而產生不必要的電能損耗。此外,系統設定當處于后半夜這一道路行駛車輛相對較少的時段時,控制器將會通過PWM信號對LED路燈進行亮度調節,并在檢測到車輛速度信號時增強LED亮度,在車輛通過后重復之前PWM信號的亮度調節工作,滿足車輛安全通行的同時起到節約電能的功能效果。
2 基于節能控制的智能化路燈系統的無線通訊研究
在節能路燈系統的無線通信系統設計方面,本文采用了三級通信模式,分別為路燈、控制子站以及監控中心。其中,監控中心的作用在于對各控制子站的運行情況進行管控,通過子站下達路燈控制命令的同時,完成對子站反饋數據信息的實時收集。控制子站的作用在于對子站管控范圍內的路燈進行管理,控制路燈狀態的同時對路燈的電壓、電流等各電路運行參數進行監控,并將相關信息反饋給監控中心。路燈作為終端設備,主要包含了控制箱和變壓器兩部分,用于接收并執行上級下達的各種控制命令,實現對路燈狀態的快速調節。
3 基于節能控制的智能化路燈系統的硬件設計
硬件設計主要針對城市路燈終端,包括了測速儀、光照傳感器、亮度調節電路以及測距電路幾部分,下面對硬件系統的整體規劃情況進行介紹。
3.1 雷達測速儀分布
雷達測速儀的工作目標在于對道路行駛車輛的速度進行監測,通過采集的速度信號對路燈的變化頻率進行控制。在實際運行時,隨著車輛的行進,路燈會在系統的控制下變亮和變暗,車輛行駛前方的路燈將會依次點亮,車輛行駛后方的路燈將會依次變暗,測速儀的運行可靠性直接關系的路燈的點亮與變暗順序,對于車輛行駛安全性具有較大影響,對于路燈的節能控制也具有積極作用。相對而言,隨著雷達測速儀布置密集程度的增加,系統對車輛速度信號的采集結果將會更加精確,在綜合考慮系統精度與項目成本的情況下,建議間隔1公里設置一處測速儀。考慮到測速儀實時采集車輛速度信號的運行需求,擬采用CSR-90型測速儀,將其固定于道路周邊或路燈燈桿區域,實現對車輛速度信號的監測采集。
3.2 紅外測距儀分布
在非直行道路時,單純依靠測速儀無法判斷車輛的行駛方向。為此,在十字路口區域,智能化路燈系統需要布設儀器對車輛后續行駛方向進行判定;在雙向六車道區域,由于車輛的行駛方向與車道有關,在判斷方向時可以根據路燈與車道的相對距離實現對車輛行駛方向的判斷。因此,本系統計劃通過紅外測距裝置完成行駛方向的判斷工作,具體需要將該裝置設置于十字路口前的200m附近區域,通過分析車、燈間距的測量結果確定車輛的前進方向,以此來針對性地調節路燈亮度。由于無法對現場情況進行準確預測,因此需要將車輛右轉、左轉以及直行三種可能考慮在內,通過將測距裝置布設于各路口200m附近區域,完成對車輛行駛方向的判斷和對路燈狀態的控制工作。
3.3 硬件結構設計
在硬件結構方面,智能化節能路燈的硬件部分主要包括PWM電路和智能控制器。其中,智能控制器可以直接選用ZigBee芯片,降低成本支出。系統內部的設備主要包含了測速儀、測距儀、光照傳感器、控制器、驅動電路、模數數模轉換器、信號變送器等。整體工作原理如圖1所示,光照傳感器會將采集的光信號傳輸給模數轉換器,轉化為相應的數字信號實現對路燈開關狀態的控制。測速儀則將速度信號傳輸給控制器,通過內部算法對路燈點亮與調暗過程進行控制。
4 基于節能控制的智能化路燈系統的軟件設計
智能化路燈系統的設計目標之一在于減少電能損耗,本系統根據光照亮度將一天劃分為五個階段三個部分,分別為白天至黃昏、黃昏后五個小時、黃昏五小時后至天亮。其中,第一部分光照較強,無需開啟路燈,故利用PWM信號調節輸出為0%;第二部分為道路行車、行人高峰期,此時光照較暗,故利用PWM信號調節輸出為100%;第三部分無光照,但由于車輛、行人極少,則系統控制在未檢測到行車時提供30%輸出,在檢測到行車時提供70%輸出。系統的軟件程序運行流程為:上電運行并完成初始化,光照傳感器對當前環境的光信號進行采集,控制器依據模數轉換的光信號判定是否開啟路燈,若光照亮度低至預定標準,則啟動路燈并進入5h的車輛行駛高峰期計時階段,并將這段時間的路燈亮度調至最亮;當計時結束時,控制所有路燈亮度至30%狀態,并啟動測速儀采集車輛速度信號,完成車輛周邊路燈亮度在70%與30%之間的調整,而信號的傳輸則需要依靠ZigBee無線網絡進行。
結語:本文針對當前城市恒照度、全夜燈路燈系統的運行模式提出了改進措施,研究了一種智能化的路燈節能控制系統。系統對路燈的無線遠程控制依靠近距離通信的ZigBee技術和遠距離通信的GPRS技術來實現,前者建立控制子站與路燈之間的聯系,后者建立子站與監控中心之間的聯系。為了減少能源損耗,系統將全天設置成三個時段,通過光照傳感器控制路燈啟動,通過定時器控制路燈最高亮度的持續時間,通過測速儀、測距儀監測車輛位置并實時調節路燈亮度,實現節能控制和安全運行的目標。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
印刷工業(2020年4期)2020-10-27 02:45:52
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國交通信息化(2017年4期)2017-06-06 07:21:52
