基于PreScan 的自動泊車仿真研究*
2021-02-25 06:27:56朱鵬飛丁文政田昱鑫
計算機與數字工程 2021年1期
關鍵詞:規劃
朱鵬飛 梁 威 丁文政 田昱鑫
(上海工程技術大學機械與汽車工程學院 上海 201620)
1 引言
隨著科技的不斷進步,汽車工業得到了迅猛的發展,車輛日益增多,人們出行越來越方便的同時,停車問題也越來越明顯,尤其是在一些大型的商場超市和景區旁邊。為了能有限的空間內劃分出更多的車位,每個車位的空間越來越窄小。對于駕駛員來說,特別是在一些未知障礙下泊車入位成為一個不小的挑戰[1]。為了降低駕車者倒車入位操作的難度,自動泊車系統得到了廣泛的研究[2~3]。
通常,停車場是在過道兩側橫向、縱向和斜向安排車位,相應地就有所謂“平行泊車”、“垂直泊車”和“斜向泊車”三種泊車方式(圖1)。本文所提出的,主要解決圖1 中(a)、(b)兩種環境下的車位檢測問題,采用多傳感器融合的方法,可以分別獲得各種類別的信息,這些信息通過控制中心進行數據融合、綜合判斷,更加準確地感知停車場周圍的環境,做出準確的路徑規劃。
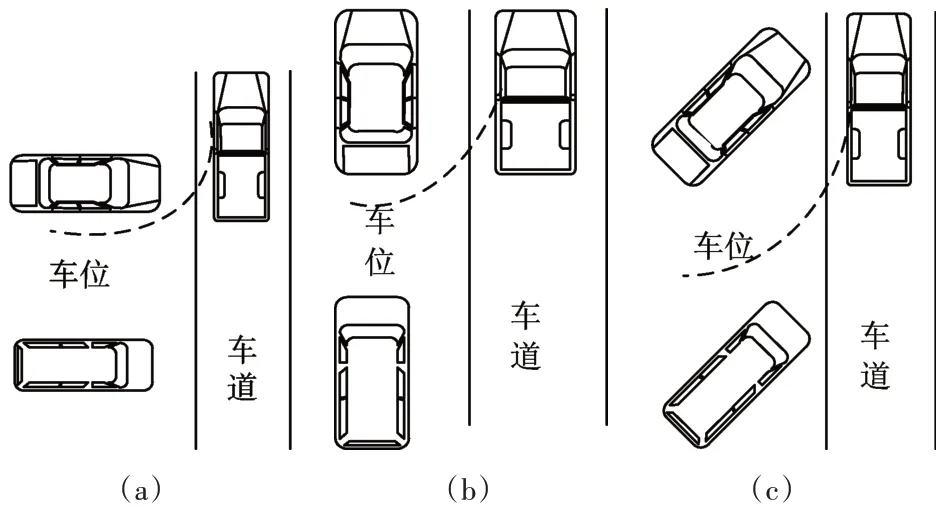
圖1 泊車方式
2 問題描述
2.1 自動泊車的數學模型
典型的自動泊車系統通常與其他系統,例如:自適應巡航控制,預先緊急制動系統等,以及導航數據一起使用,可以提高駕駛員的舒適度和安全性[4~6]。本文所選用的汽車泊車模型如圖2所示,在參考系,(x,y,θ)為車輛模型后軸中點A的坐標,θ為車型與x軸的夾角,?為車型前輪轉向角,L為車型車身長,L1為車頭和車位到軸的距離,μ為車型的運動速度。
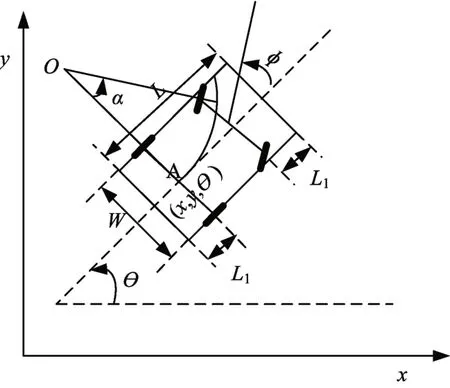
圖2 車輛坐標系
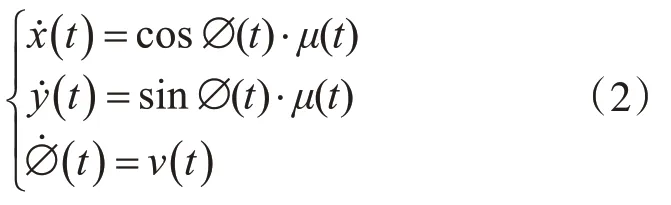
其數學模型為

在泊車研究中,控制的是目標車輛的線速度和車體的角速度,對該模型進行簡化,令μ(t)tgθ(t)/l=ν(t),得到:
u,v分別為目標車輛的線速度和角速度[10]。
2.2 目標車輛動力學約束
通過對車輛數學模型的分析,得到車輛的動力學約束。假設目標車輛是一個矩形剛體[11],其瞬時轉向中心O,在平面運動過程中,車輛后輪在垂直方向上速度分量為0,由此性質可得約束方程[7]:

另一個約束就是轉向裝置的角度約束,αmin<α<αmax,即目標車輛后輪中軸的速度要大于等于角速度和最小轉彎半徑ρmin的乘積,得第二個約束方程:

由方程(3)、(4)可得目標車輛動力學約束方程,如下:

2.3 自動泊車系統路徑規劃
路徑規劃指的是,中央處理器根據汽車與目標停車位的相對位置信息,對后續泊車過程的運動路線進行分析,規劃計算出最佳的泊車路徑。國內外關于泊車路徑的研究較多,常見的泊車路徑可分為平行式、垂直式和傾斜式。
圖3 為平行泊車路徑規劃示意圖,目標停車位前后方已停有車輛,其中L1和L2分別為車位的長度和寬度,D 為車身縱向中軸線到X 軸的距離,平行泊車路徑可簡化描述為PP1直線、P1P2圓弧和P2P3圓弧。圖中對圓弧和直線相接處做了圓化處理,緩解泊車入庫時轉向輪突變的問題[8~10]。

圖3 平行式泊車路徑規劃
圖4 為垂直泊車路徑規劃示意圖,在垂直泊車過程中需要完成車身方向角90°的改變,并需要注意左右兩側的停車間隙,方便乘客上下車[11~12]。具體泊車路徑需要完成向前后向的三步行駛,主要包括:直行向后行駛,即直線PP1;右打向后行駛,即弧線P1P2;直行倒車,即線段P2P3。
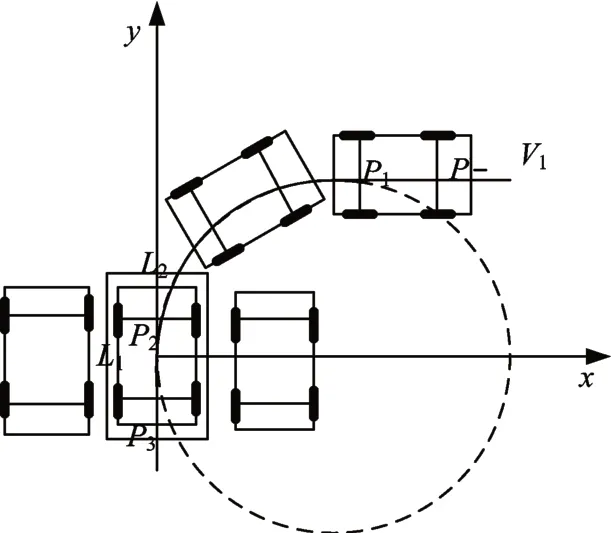
圖4 垂直式泊車路徑規劃
3 PreScan中建模和仿真分析
3.1 場景的選擇與建立
PreScan 是一個集場景仿真與控制模型為一體的軟件,因此,它可以很方便地用于再現現實采集到的工況,并且利用其豐富的傳感器模型以及與Simulink的融合,進行控制系統的開發[13~15]。
本文旨在研究一種基于PreScan的汽車自動泊車的快速建模方法。主要內容是首先選取基于多個車輛的停車場景并建模,根據汽車的泊車方式,進行四種典型的泊車仿真模擬測試[16]。最后將建立好的參數化模型與PreScan 相結合,對本文開發出的建模方法的可行性進行測試[17]。
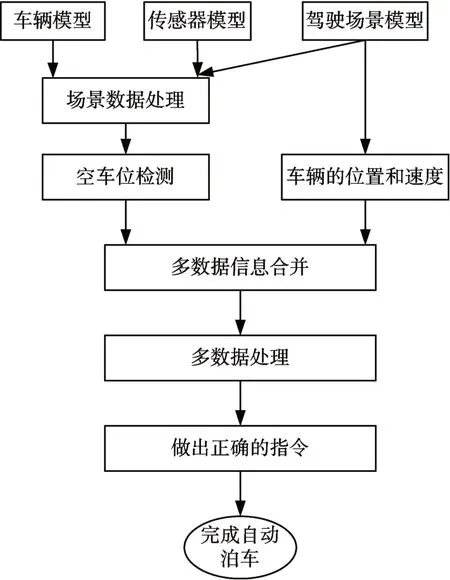
圖5 自動泊車流程
自動泊車系統使用超聲波傳感器掃描環境并測量停放的車輛之間的自由空間。目標車輛配備三個超聲波傳感器和一個攝像機,其中有兩個傳感器位于車輛左前側和右側的用于搜索停車區域,位于車輛中間后側的第三傳感器用于防止與后方的車輛、人等發生碰撞。
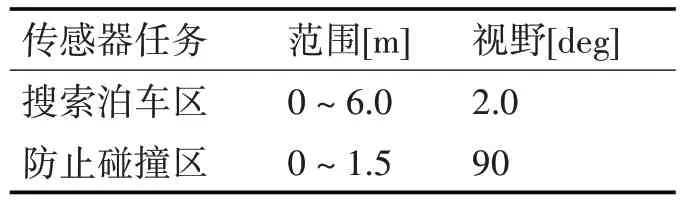
表1 傳感器的范圍和視野
目標車輛遵循預定的軌跡,利用多傳感器的信息融合,找到合適的泊車區域,提高駕駛員操作的安全性和舒適性,PreScan 建模的場景允許在道路的左側和右側進行垂直(a)和平行停車(b)(見圖6)。
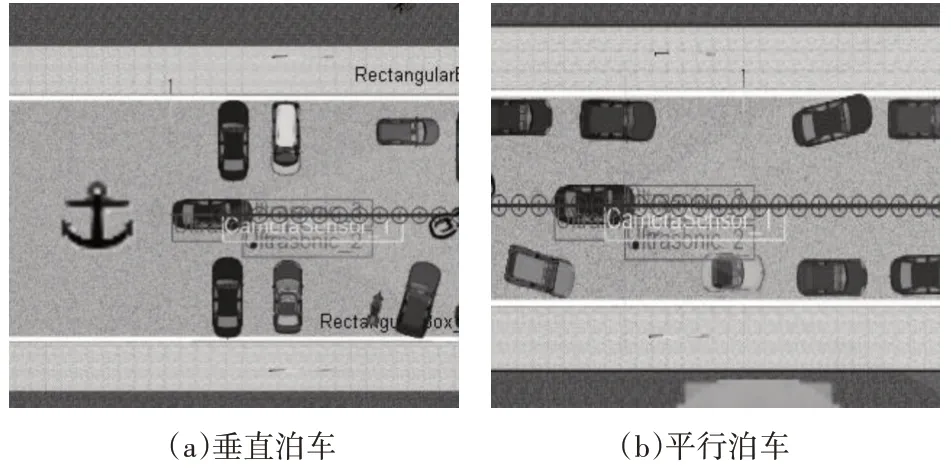
圖6 場景建模
3.2 仿真結果分析
在自動泊車過程中一旦檢測到停車空間等于或大于所需的最小空間,車輛就會剎車并完全停止,然后根據規劃好的路徑進行自動泊車。如圖7~8 所示,用于檢測目標車輛、行車軌跡、障礙物輪廓的泊車路線,其中圖(a)是檢測泊車區域路線圖,圖(b)是檢測到泊車區域后完成自動泊車的路線圖。
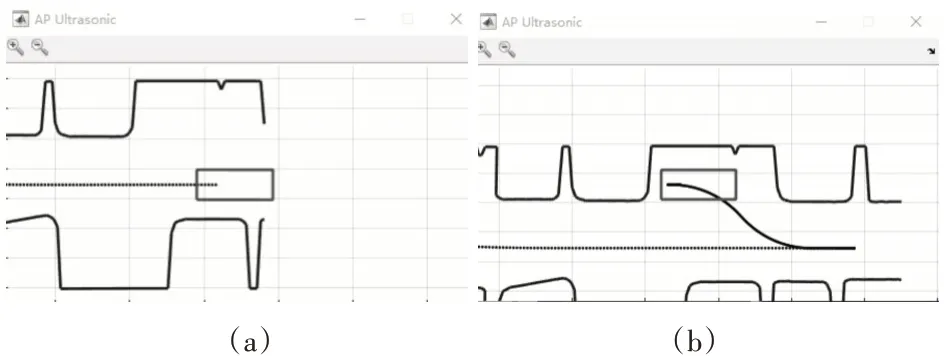
圖7 平行泊車(左側)行車軌跡
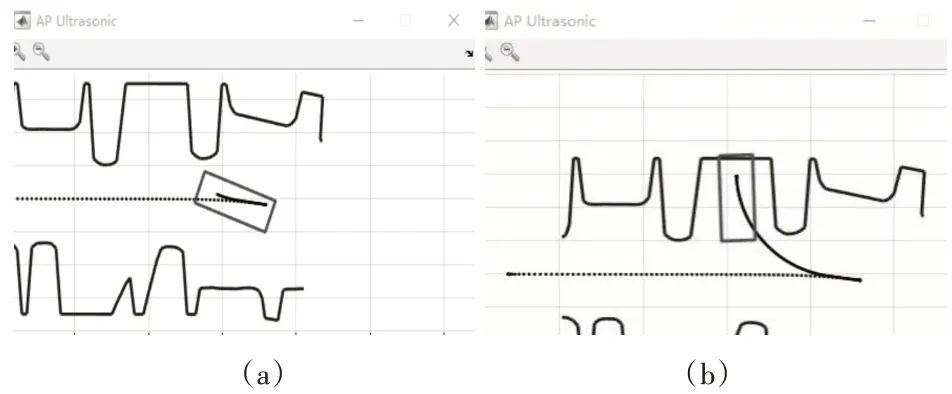
圖8 垂直泊車(左側)行車軌跡
由上圖可以得到,目標車輛經過系統的控制能夠完成垂直和平行泊車,結果如上圖所示。但是由于目標車輛的邊框是其邊界框,而不是其真實的實際形狀,導致在超聲波圖上會顯示有虛假碰撞的存在圖8(b),在實際運行的3D模型中并沒有發生。
4 結語
本文通過PreScan軟件建立泊車環境并設定好泊車路徑和基本運動參數的情況下,通過聯立Simulink 進行泊車軌跡仿真,驗證了垂直泊車和平行泊車的可行性,設計的自動泊車控制系統不僅提高了泊車系統的智能性,還進一步優化了狹窄泊車位的利用率,增強了泊車的便利性。該仿真過程不但能夠在傳感器的選擇和算法方面為自動泊車技術的研究提供參照,而且節省了成本降低了實際操作的危險性。但是由于泊車環境和自然天氣的復雜性,單一的模板匹配并不能完全滿足實際自動泊車系統的魯棒性要求,以后的工作還要進一步完善對多變的泊車環境情況下車位檢測算法準確性能的研究。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41