侵入物高速撞擊下鉸鏈?zhǔn)絼?dòng)車(chē)組的安全性
2021-02-18 19:44:01朱衛(wèi)張海岳譯新蘇永章張宸瑜付耿哲
計(jì)算機(jī)輔助工程 2021年4期
朱衛(wèi) 張海 岳譯新 蘇永章 張宸瑜 付耿哲



摘要:? 為探究侵入物高速撞擊下鉸鏈?zhǔn)絼?dòng)車(chē)組的安全性,在實(shí)物三維掃描重構(gòu)的基礎(chǔ)上,構(gòu)建一種新的活體三維有限元層疊模型,并在LS-DYNA中進(jìn)行擺錘側(cè)面碰撞分析驗(yàn)證;通過(guò)鉸鏈?zhǔn)絼?dòng)車(chē)組與活體在110 km/h速度下的碰撞仿真計(jì)算,討論動(dòng)車(chē)組運(yùn)行的安全性以及吸能裝置的可靠性。結(jié)果顯示:活體的有限元層疊模型既能保證計(jì)算精度,又能提高計(jì)算效率;在110 km/h的碰撞速度下,車(chē)體加速度為0.117g,輪對(duì)抬升量為0.238 mm,車(chē)鉤每5 m長(zhǎng)度的壓縮量最大約為1.89 mm。各項(xiàng)指標(biāo)都低于EN 15227標(biāo)準(zhǔn),動(dòng)車(chē)組行車(chē)安全性沒(méi)有受到影響,吸能裝置也能可靠工作。
關(guān)鍵詞:? 軌道; 活體侵入物; 耐撞性; 鉸鏈?zhǔn)絼?dòng)車(chē)組; 吸能裝置
中圖分類(lèi)號(hào):? U270.12; TB115.1文獻(xiàn)標(biāo)志碼:? B
收稿日期: 2021-10-17修回日期: 2021-11-05
基金項(xiàng)目:? 國(guó)家自然科學(xué)基金資助項(xiàng)目(51865009);江西省自然科學(xué)基金資助項(xiàng)目(20192BAB206022)
作者簡(jiǎn)介: 朱衛(wèi)(1983—),男,湖南株洲人,工程師,碩士,研究方向?yàn)槌擒壾?chē)輛車(chē)體研發(fā),(E-mail)zhuwei19830503@163.comSafety of articulated EMU
under high-speed impact of invader
ZHU Wei1,2, ZHANG Hai3, YUE Yixin1,2, SU Yongzhang1,2,
ZHANG Chenyu3, FU Gengzhe3
(1. The State Key Laboratory of Heavy Duty AC Drive Electric Locomotive Systems Integration, Zhuzhou 412001, Hunan, China;
2. CRRC Zhuzhou Locomotive Co., Ltd., Zhuzhou 412001, Hunan, China; 3. Key Laboratory of Conveyance and Equipment of
the Ministry of Education of China, East China Jiaotong University, Nanchang 330013, China)
Abstract: To explore the safety of the articulated EMU under the high-speed impact of invader, a new three-dimensional finite element stack model of the living invader is constructed based on the reconstruction of the physical three-dimensional scanning, and the analysis and verification of pendulum side impact is carried out in LS-DYNA. The simulation calculation of impact between the articulated EMU and living body at speed of 110 km/h is done, and the safety of the EMU operation and the reliability of the energy absorbing device are discussed. The results show that the finite element stack model of the living body can not only ensure the calculation accuracy, but also improve the calculation efficiency. At impact speed of 110 km/h, the acceleration of the EMU is 0.117g, the lift of the wheelset is 0.238 mm, and the maximum compression of the coupler length per 5 m is about 1.89 mm. All indexes are lower than the EN 15227 standard, the safety of the EMU operation is not affected, and the energy absorbing device can also work reliably.
Key words: rail; living invader; crashworthiness; articulated EMU; energy absorbing device
0引言列車(chē)運(yùn)行安全一直是鐵路運(yùn)輸?shù)闹刂兄亍kS著列車(chē)運(yùn)行速度的不斷提高,列車(chē)發(fā)生碰撞事故的概率也逐漸增大,一旦發(fā)生碰撞事故,后果不堪設(shè)想[1]。英國(guó)最早開(kāi)始進(jìn)行軌道交通碰撞安全性的研究[2],提出以可控大變形方式吸收碰撞能量的耐撞性車(chē)體結(jié)構(gòu)設(shè)計(jì)方法,在自制試驗(yàn)臺(tái)上對(duì)車(chē)體端部進(jìn)行準(zhǔn)靜態(tài)沖擊試驗(yàn)和2列全尺寸列車(chē)的正面頭對(duì)頭碰撞試驗(yàn)。在歐盟資助下,歐洲開(kāi)展一系列鐵路安全研究項(xiàng)目,并于2007年頒布列車(chē)碰撞安全標(biāo)準(zhǔn),推動(dòng)車(chē)輛設(shè)計(jì)的改進(jìn)。國(guó)內(nèi)的中南大學(xué)、西南交通大學(xué)、中國(guó)鐵道科學(xué)研究院等科研院所,也先后進(jìn)行列車(chē)碰撞動(dòng)力學(xué)模型對(duì)列車(chē)碰撞過(guò)程中的響應(yīng)行為[3]、車(chē)間連接裝置的有限元仿真模擬方法[4-5]以及碰撞過(guò)程中乘客二次傷害安全性[6]等關(guān)鍵問(wèn)題研究。中車(chē)青島四方、中車(chē)長(zhǎng)春客車(chē)等企業(yè)也在列車(chē)碰撞實(shí)物試驗(yàn)上達(dá)到國(guó)際先進(jìn)水平,分別完成76 km/h列車(chē)實(shí)車(chē)車(chē)輛級(jí)對(duì)撞試驗(yàn)和2列8車(chē)編組高速動(dòng)車(chē)組碰撞試驗(yàn)。列車(chē)的碰撞仿真研究一般早于碰撞試驗(yàn),相比于碰撞試驗(yàn),碰撞仿真的經(jīng)濟(jì)性和可重復(fù)性更好[7]。為探究侵入物高速撞擊下鉸鏈?zhǔn)絼?dòng)車(chē)組的安全性,在實(shí)物三維掃描重構(gòu)的基礎(chǔ)上,構(gòu)建一種新的活體(本文以牛為研究對(duì)象)三維有限元層疊模型,并通過(guò)鉸鏈?zhǔn)絼?dòng)車(chē)組與活體在110 km/h速度下的碰撞仿真計(jì)算,探討動(dòng)車(chē)組運(yùn)行的安全性以及吸能裝置的可靠性。
1活體侵入物三維重構(gòu)構(gòu)建活體侵入物的有限元模型,需要有高度相似的幾何外形和較為準(zhǔn)確的結(jié)構(gòu)。逆向工程設(shè)計(jì)是實(shí)體三維快速重構(gòu)的重要方法,在醫(yī)學(xué)臨床診斷或生物醫(yī)學(xué)工程領(lǐng)域,活體結(jié)構(gòu)三維重建常利用CT和MRI數(shù)據(jù)進(jìn)行處理[8]。
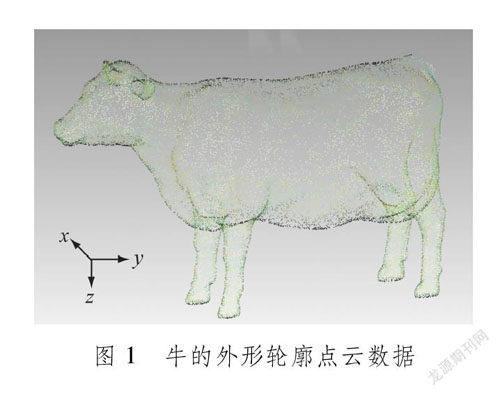
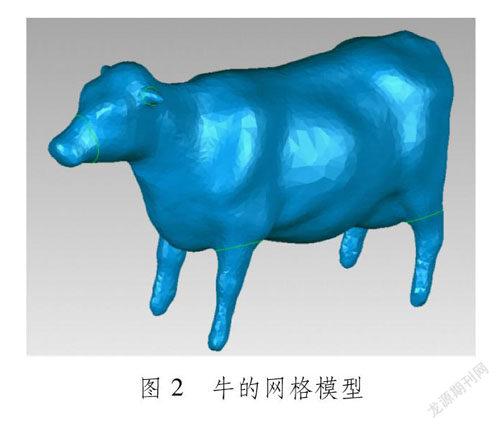
1.1活體侵入物點(diǎn)云數(shù)據(jù)獲取及處理本文使用德國(guó)ATOS光學(xué)掃描儀,對(duì)牛進(jìn)行實(shí)物掃描,獲取牛的外形輪廓點(diǎn)云數(shù)據(jù)(見(jiàn)圖1),牛的外形輪廓尺寸為:長(zhǎng)2 044 mm、寬650 mm、高1 320 mm,質(zhì)量600 kg。
在對(duì)牛的點(diǎn)云數(shù)據(jù)進(jìn)行過(guò)濾處理后,使用多邊形網(wǎng)格進(jìn)行三角化封裝,得到牛的網(wǎng)格模型,見(jiàn)圖2。
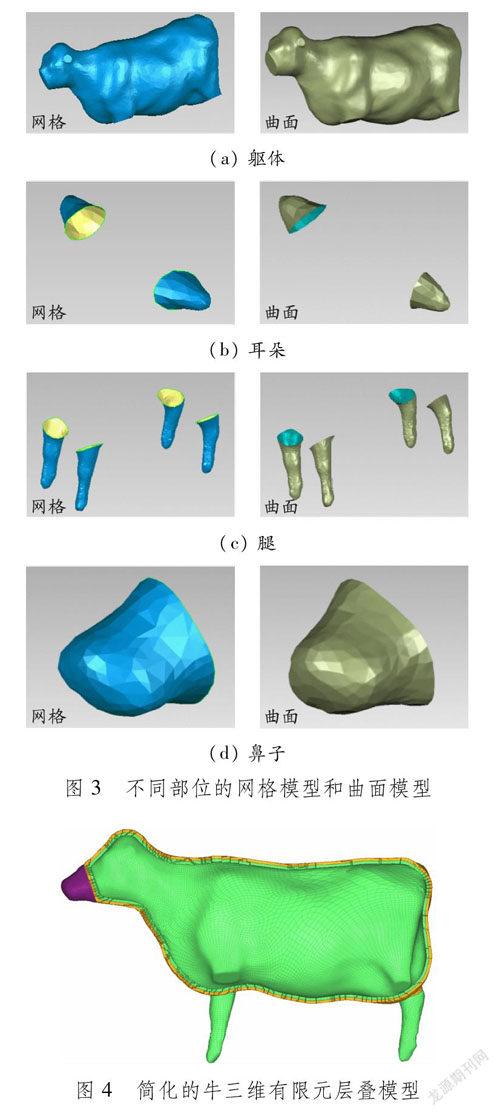
1.2不同部位模型分割及曲面重構(gòu)依據(jù)牛的外形結(jié)構(gòu),將牛的網(wǎng)格模型分割為軀體、耳朵、腿以及鼻子等部分,并生成對(duì)應(yīng)的NURBS曲面模型。牛的軀體、耳朵、腿以及鼻子的網(wǎng)格模型和曲面模型見(jiàn)圖3。
2牛的三維有限元層疊模型構(gòu)建從生物解剖學(xué)結(jié)構(gòu)上講,牛由肌肉、骨骼、器官以及其他組織構(gòu)成。在進(jìn)行生物體損傷研究時(shí),有限元模型不僅需要在幾何上與實(shí)際解剖結(jié)構(gòu)一致,而且應(yīng)能準(zhǔn)確模擬各種關(guān)節(jié)及連接部位的力學(xué)性能,各部位采用的材料特性也應(yīng)與生物體一致[9]。在高速碰撞下,牛的存活概率極低,故不用考慮牛的損傷,不需要對(duì)牛進(jìn)行器官級(jí)的建模。
2.1三維有限元層疊模型的網(wǎng)格建立對(duì)碰撞過(guò)程沒(méi)有影響或影響不大的一些局部結(jié)構(gòu),可以進(jìn)行適當(dāng)簡(jiǎn)化,如忽略模型中的內(nèi)臟等。將牛的骨骼簡(jiǎn)化為緊貼肌肉組織的一層有厚度的實(shí)體薄殼,并刪除一些倒圓、倒角和圓孔等。簡(jiǎn)化的牛三維有限元層疊模型見(jiàn)圖4。
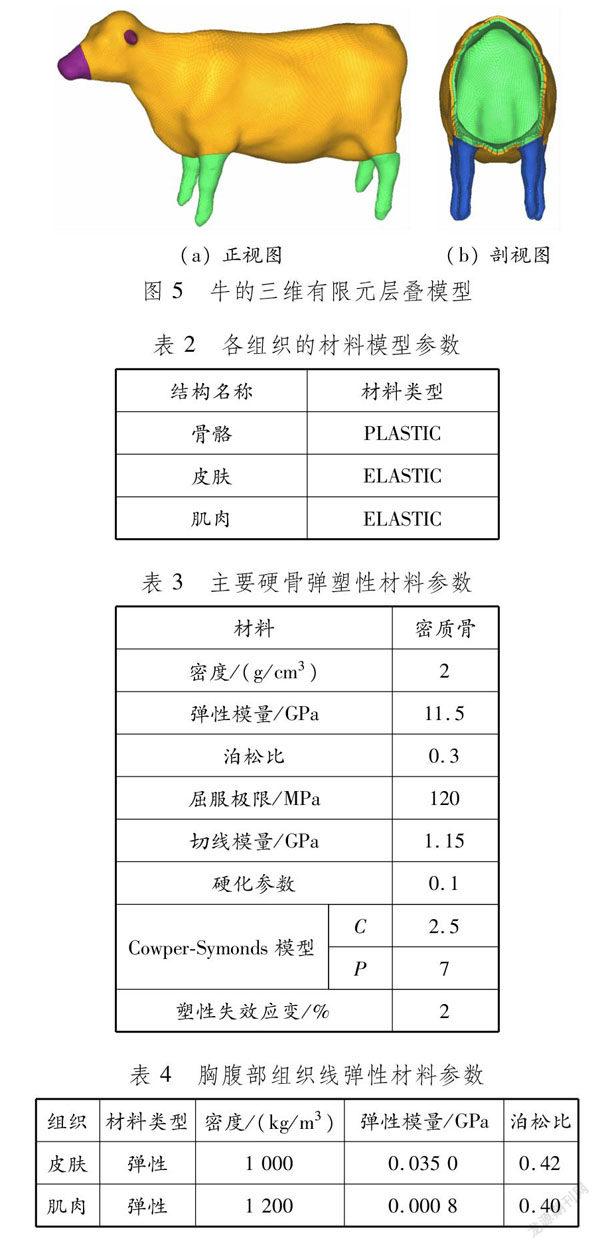
將牛的肌肉組織、骨骼等作為實(shí)體結(jié)構(gòu),使用三維實(shí)體單元SOLID164進(jìn)行網(wǎng)格劃分,單元尺寸設(shè)置為10 mm×10 mm;牛的頭部、耳朵殼體使用薄殼單元SHELL163進(jìn)行網(wǎng)格劃分,單元實(shí)常數(shù)厚度設(shè)置為1 mm;碰撞模型中沒(méi)有建模的大型組織使用MASS166進(jìn)行網(wǎng)格劃分。單元總數(shù)為172 118個(gè),單元類(lèi)型及常數(shù)見(jiàn)表1,牛三維有限元層疊模型見(jiàn)圖5。
牛的全身骨骼,包括肋骨、脊柱和胸骨等,選用彈塑性材料模擬,在LS-DYNA中選用MAT-03材料。在骨骼材料中設(shè)定失效塑性應(yīng)變模擬骨骼破壞,可以保證當(dāng)應(yīng)變達(dá)到極限時(shí),通過(guò)刪除單元以模擬骨折。皮膚與肌肉等采用線彈性材料本構(gòu)模型。各組織的材料模型參數(shù)見(jiàn)表2,主要硬骨彈塑性材料參數(shù)見(jiàn)表3,胸腹部組織線彈性材料參數(shù)見(jiàn)表4。
碰撞是典型的大變形問(wèn)題,由于動(dòng)物體模型復(fù)雜,表面眾多,在碰撞過(guò)程中相近的表面都可能由于變形而發(fā)生接觸,且哪些表面發(fā)生接觸事先無(wú)法預(yù)知,因此接觸類(lèi)型應(yīng)定義為自動(dòng)單面接觸。
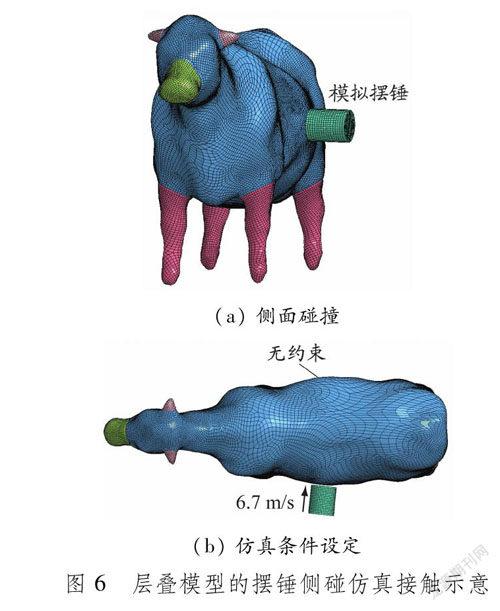
2.2層疊模型的擺錘側(cè)碰仿真驗(yàn)證用LS-DYNA對(duì)創(chuàng)建的牛的層疊模型進(jìn)行擺錘側(cè)碰仿真分析驗(yàn)證。參考Viano在1989年的尸體擺錘碰撞試驗(yàn),擺錘為一圓柱形物體,直徑為150 mm,質(zhì)量為23.4 kg,碰撞速度為6.7 m/s,碰撞總時(shí)長(zhǎng)為50 ms[10]。擺錘的彈性模量E=0.1 GPa,皮膚、肌肉與擺錘的接觸類(lèi)型為自動(dòng)面-面接觸,摩擦因數(shù)為0.3;骨骼與肌肉的接觸類(lèi)型為滑動(dòng)不分離面-面接觸,摩擦因數(shù)為0.3;整個(gè)牛的組織采用自接觸,摩擦因數(shù)為0.2。牛的側(cè)面與擺錘撞擊仿真接觸示意見(jiàn)圖6。
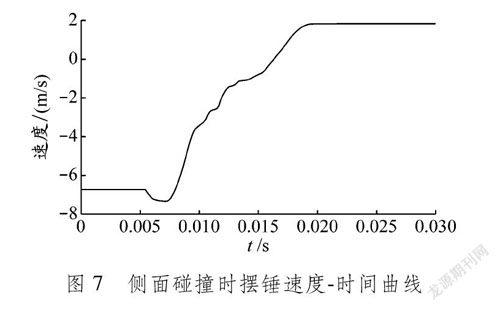
在LS-DYNA中進(jìn)行仿真計(jì)算,設(shè)置計(jì)算總時(shí)長(zhǎng)為31 ms。擺錘以6.7 m/s的初速度沖擊牛的側(cè)面時(shí),速度與時(shí)間歷程曲線見(jiàn)圖7。擺錘接觸牛后受到阻擋,速度迅速下降,牛的軀體吸收擺錘碰撞產(chǎn)生的能量,并通過(guò)軀體皮膚、肌肉以及骨骼的變形吸收能量;當(dāng)速度變?yōu)?后,擺錘產(chǎn)生的能量被軀體充分吸收,這時(shí)牛的肌肉、骨骼產(chǎn)生一定的回彈,擺錘反向移動(dòng),速度上升到約1.9 m/s。
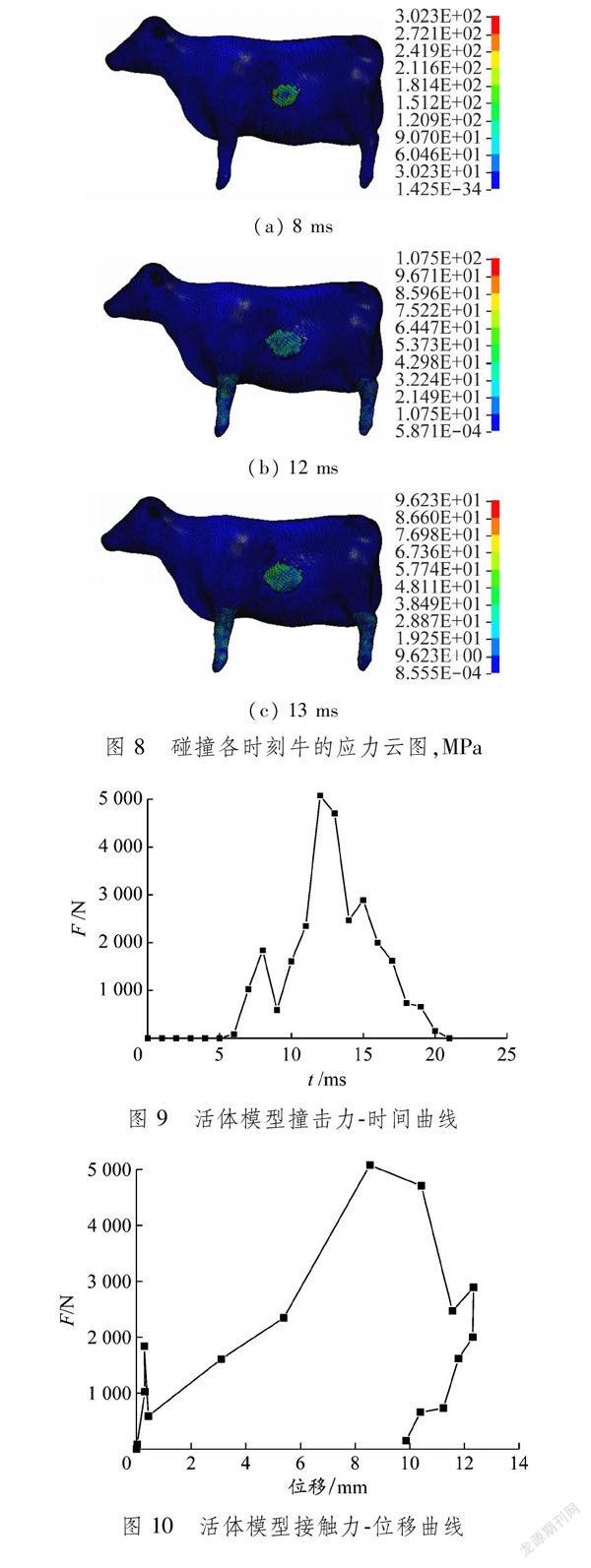
碰撞各時(shí)刻牛的應(yīng)力云圖見(jiàn)圖8。在碰撞過(guò)程中,首先肌肉組織出現(xiàn)較大應(yīng)力,并有大量單元失效被刪除,肌肉組織逐漸被破壞;然后在牛的左側(cè)骨骼上部分區(qū)域出現(xiàn)較大應(yīng)力,伴隨著部分單元失效被刪除,表明此處發(fā)生骨折的風(fēng)險(xiǎn)較大。
活體模型撞擊力-時(shí)間曲線見(jiàn)圖9,活體模型撞擊力-位移曲線見(jiàn)圖10。與文獻(xiàn)[8]中的人體試驗(yàn)結(jié)果和仿真計(jì)算結(jié)果相比,響應(yīng)曲線一致性均較高。人體擺錘撞擊試驗(yàn)的最大撞擊力為4.3 kN,與模型仿真計(jì)算結(jié)果相差16.3%,撞擊力與文獻(xiàn)存在差異的原因是層疊模型的材料參數(shù)不一致,但數(shù)值偏差在允許范圍內(nèi)。
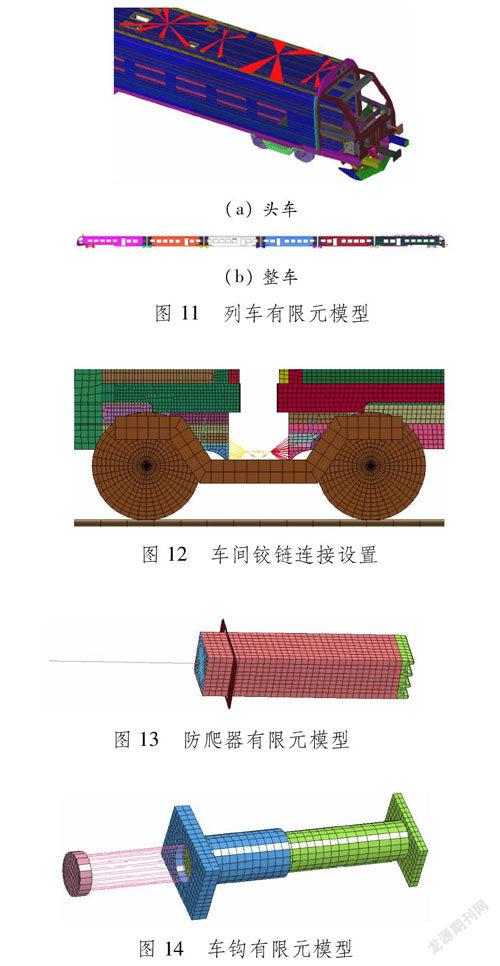
3列車(chē)有限元模型的建立鉸鏈?zhǔn)紼MU為出口歐洲的一種具有高性?xún)r(jià)比的高速動(dòng)車(chē)組,設(shè)計(jì)時(shí)速為160 km/h,整車(chē)為6節(jié)編組,包括1節(jié)頭車(chē)、1節(jié)尾車(chē)、4節(jié)中間車(chē),車(chē)上的設(shè)備質(zhì)量通過(guò)增加質(zhì)量點(diǎn)進(jìn)行配重處理,總質(zhì)量為209.335 t[11]。列車(chē)的有限元模型見(jiàn)圖11,模型包含1 849 745個(gè)節(jié)點(diǎn)、2 019 890個(gè)單元,其中殼單元1 833 721個(gè)、三維實(shí)體單元342 215個(gè)、質(zhì)量單元44個(gè)、彈簧單元81個(gè)、節(jié)點(diǎn)剛體126個(gè)、梁?jiǎn)卧?4個(gè)、柔性連接單元7個(gè)。
車(chē)間鉸鏈連接設(shè)置見(jiàn)圖12,通過(guò)耦合接觸單元并添加彈簧單元,實(shí)現(xiàn)車(chē)體之間的連接。
防爬器底部通過(guò)梁?jiǎn)卧c車(chē)體前端的節(jié)點(diǎn)耦合,實(shí)現(xiàn)防爬器與車(chē)體的連接,見(jiàn)圖13。同時(shí),防爬器內(nèi)外壁設(shè)置為自動(dòng)面-面接觸,實(shí)現(xiàn)碰撞時(shí)的變形吸能。
車(chē)鉤底部通過(guò)梁?jiǎn)卧c車(chē)體前端的節(jié)點(diǎn)耦合。與防爬器不同,車(chē)鉤單元類(lèi)型采用非線性的六自由度梁?jiǎn)卧?jiàn)圖14。
排障器使用實(shí)體單元建模,但與車(chē)頭螺栓的連接采用梁?jiǎn)卧M,見(jiàn)圖15。
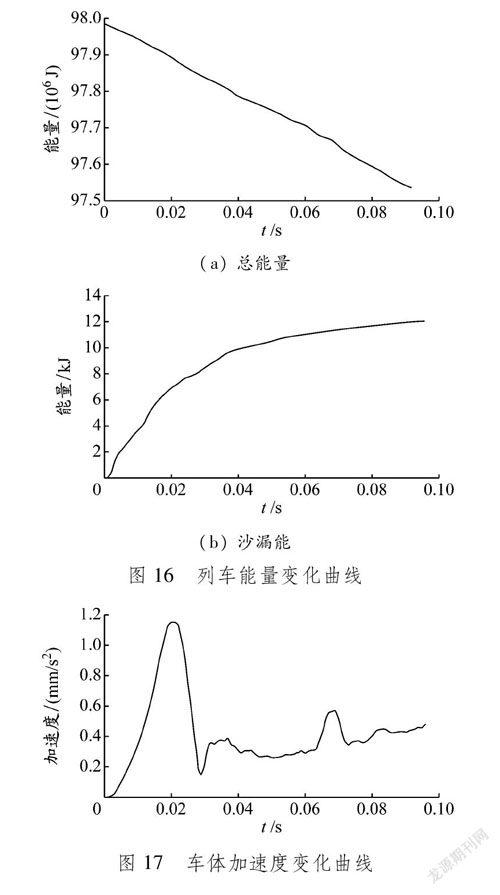
4列車(chē)與牛的碰撞仿真分析依據(jù)EN 15227標(biāo)準(zhǔn)[12],設(shè)置列車(chē)與牛碰撞的工況:列車(chē)以110 km/h速度與車(chē)前軌道上靜止的一頭600 kg牛發(fā)生正面碰撞。列車(chē)能量隨時(shí)間變化的曲線見(jiàn)圖16,車(chē)體初始動(dòng)能為9.803×104 kJ,在碰撞過(guò)程中,車(chē)體通過(guò)彈塑性變形吸收能量,使動(dòng)能轉(zhuǎn)化為內(nèi)能;在碰撞結(jié)束后,車(chē)體動(dòng)能為9.754×104 kJ;沙漏能遠(yuǎn)小于總能量的5%。
EN 15227標(biāo)準(zhǔn)規(guī)定機(jī)車(chē)的縱向加速度不能超過(guò)5g。車(chē)體加速度變化曲線見(jiàn)圖17,可知車(chē)體最大加速度僅約為0.117g,遠(yuǎn)低于5g。
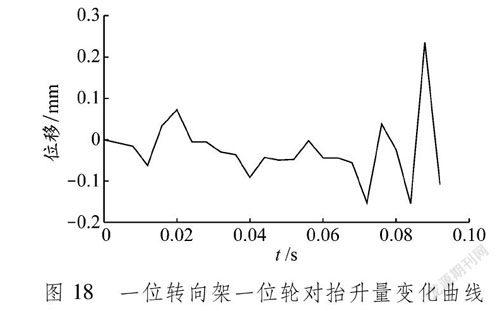
列車(chē)頭車(chē)的一位轉(zhuǎn)向架的一位輪對(duì)抬升最大。其抬升量變化曲線見(jiàn)圖18,輪對(duì)最大抬升量為0.238 mm,未超過(guò)輪緣名義高度(28 mm)的75%,滿(mǎn)足EN 15227標(biāo)準(zhǔn)中關(guān)于爬車(chē)風(fēng)險(xiǎn)評(píng)估的要求。
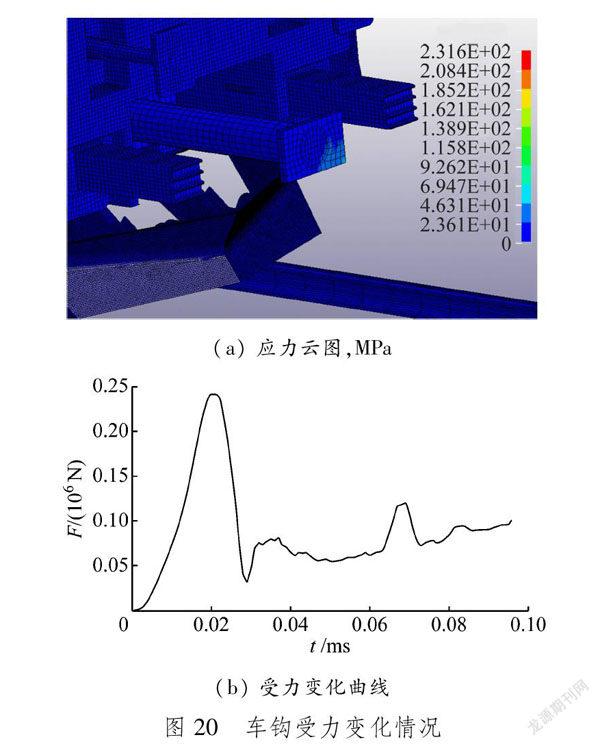
為評(píng)價(jià)車(chē)鉤變形情況,在車(chē)鉤上取1對(duì)節(jié)點(diǎn)(相距1.35 m,見(jiàn)圖19(a)),車(chē)鉤變形量由節(jié)點(diǎn)對(duì)的縱向位移差確定,圖19(b)為車(chē)鉤變形曲線,最大變形為0.51 mm,即每5 m空間長(zhǎng)度的壓縮量最大約為1.89 mm,遠(yuǎn)小于標(biāo)準(zhǔn)允許的50 mm。圖20為車(chē)鉤受力變化情況,從圖20(b)中可知,車(chē)鉤最大受力達(dá)到242 kN,低于列車(chē)最大允許車(chē)鉤力1 000 kN。
5結(jié)論(1)層疊模型的碰撞響應(yīng)與實(shí)際的人體試驗(yàn)結(jié)果以及文獻(xiàn)仿真計(jì)算結(jié)果接近,可以保證計(jì)算精度;同時(shí)模型簡(jiǎn)化動(dòng)物體復(fù)雜的生物結(jié)構(gòu),計(jì)算效率較高。(2)由于模型的肌肉組織與骨骼之間采用點(diǎn)與點(diǎn)硬連接關(guān)系,導(dǎo)致在發(fā)生碰撞的過(guò)程中碰撞力并未從肌肉沿著各個(gè)節(jié)點(diǎn)傳送到骨骼上,導(dǎo)致肌肉組織受到的應(yīng)力過(guò)大(達(dá)到屈服極限),使肌肉單元失效,在后續(xù)研究中可以對(duì)本文模型進(jìn)一步優(yōu)化。(3)動(dòng)車(chē)組以110 km/h速度與車(chē)前軌道上一靜止的600 kg活體侵入物發(fā)生正面碰撞后,車(chē)體加速度為0.117g,遠(yuǎn)低于碰撞標(biāo)準(zhǔn)要求的5g;輪對(duì)抬升量為0.238 mm,對(duì)動(dòng)車(chē)組行車(chē)安全性沒(méi)有影響;車(chē)鉤每5 m空間長(zhǎng)度的壓縮量最大約為1.89 mm,遠(yuǎn)小于標(biāo)準(zhǔn)允許的50 mm,車(chē)鉤最大受力達(dá)到242 kN,低于列車(chē)最大允許車(chē)鉤力1 000 kN,吸能元件能可靠工作。參考文獻(xiàn):
[1]楊超. 列車(chē)碰撞動(dòng)力學(xué)關(guān)鍵問(wèn)題研究[D]. 成都:西南交通大學(xué), 2016.
[2]魏慶, 王悅明, 文彬. 國(guó)外鐵路機(jī)車(chē)車(chē)輛碰撞安全研究[J]. 國(guó)外鐵道車(chē)輛, 2012, 49(5): 39-46.
[3]謝素超, 田紅旗, 周輝. 耐沖擊地鐵車(chē)輛設(shè)計(jì)及整車(chē)碰撞研究[J]. 鐵道科學(xué)與工程學(xué)報(bào), 2008(5): 65-70. DOI: 10.19713/j.cnki.43-1423/u.2008.05.014.
[4]雷成, 肖守訥, 羅世輝. 軌道車(chē)輛新型車(chē)端專(zhuān)用吸能裝置[J]. 西南交通大學(xué)學(xué)報(bào), 2013, 48(4): 738-744. DOI: 10.3969/j. issn.0258-2724.2013.04.022.
[5]劉艷文, 肖守訥, 張志新, 等. 軌道車(chē)輛新型組合結(jié)構(gòu)吸能裝置耐碰撞性分析[J]. 計(jì)算機(jī)輔助工程, 2012, 21(5): 6-10.
[6]李蘭, 劉金朝, 王成國(guó), 等. 城軌車(chē)輛耐碰撞結(jié)構(gòu)的數(shù)字設(shè)計(jì)研究[J]. 鐵道機(jī)車(chē)車(chē)輛, 2008(2): 28-32.
[7]左建勇, 朱曉宇, 吳萌嶺. 高速列車(chē)風(fēng)阻制動(dòng)風(fēng)翼抗鳥(niǎo)撞分析[J]. 振動(dòng)與沖擊, 2014, 33(22): 30-34. DOI: 10.13465/j.cnki.jvs.2014.22.006.
[8]周芬. 汽車(chē)碰撞人體腹部有限元模型構(gòu)建與關(guān)鍵技術(shù)研究[D]. 廣東: 華南理工大學(xué), 2012.
[9]阮世捷, 胡習(xí)之, 曲杰. 汽車(chē)安全與人體損傷生物力學(xué)的有限元模擬研究[J]. 華南理工大學(xué)學(xué)報(bào)(自然科學(xué)版), 2007, 35(6): 1-7.
[10]蔡志華. 汽車(chē)碰撞中胸部生物力學(xué)響應(yīng)與損傷評(píng)估研究[D]. 廣東: 華南理工大學(xué), 2013.
[11]蘇永章, 岳譯新, 朱衛(wèi), 等. 鉸接式動(dòng)車(chē)組車(chē)體防撞性設(shè)計(jì)[J]. 電力機(jī)車(chē)與城軌車(chē)輛, 2019, 42(3): 27-30. DOI: 10.16212/j.cnki.1672-1187.2019.03.007.
[12]歐洲標(biāo)準(zhǔn)化委員會(huì). 鐵路應(yīng)用—鐵路車(chē)輛車(chē)體的防撞性要求: EN 15227—2020[S].(編輯陳鋒杰)