基于雙ARM 的水聲信號采集潛標控制系統設計
2021-02-11 05:01:30李廣勝秦華俊馮師軍謝旭良冀石磊
高技術通訊 2021年11期
李廣勝 秦華俊 馮師軍 田 甜 謝旭良 冀石磊
(*中國電子科技集團公司第三研究所 北京100015)
(**中國人民解放軍32069 部隊 北京100091)
0 引言
水聲信號采集潛標系統又稱水下浮標系統,能夠在惡劣的海洋環境條件下定點、無人值守、隱蔽地對海底信號進行采集[1-3]。作為一種探測水下信號的重要技術裝備,潛標系統具有其他探測設備不可替代的作用,被廣泛應用于國防建設、海洋科學研究、海洋綜合利用等各個領域[4]。
潛標技術的研究始于20 世紀50 年代的美國,隨后,世界海洋強國相繼開展類似的研究和應用。經過70 多年的發展,潛標在基礎理論、新技術、新材料、新工藝等方面取得了長足進展[5]。目前,美國、日本、澳大利亞、俄羅斯等國家都在積極發展潛標系統[6]。其中,美國在各類潛標裝備技術方面的研究始終保持領先地位。當前潛標的代表性成果主要有以下兩個:其一是美國伍茲霍爾海洋研究所和日本NGK OCEAN 公司研制的海洋潛標觀測系統[7]。1994 年美國建成的“百慕大試驗站錨泊系統”,通過感應式調制解調器耦合方式,潛標利用一根錨泊纜可將水下傳感器數據傳到海面浮標,然后經由衛星傳送至岸站[8]。其二是2000 年法國海洋開發研究所與MARTEC 集團合作研制的Provor CT,可在水下2 km 深度收集海洋環境數據,且能夠定期自動上浮至海面通過衛星將數據進行回收[9]。
與歐美等發達國家相比,我國在潛標系統裝備技術方面的研究起步較晚,開始于20 世紀80 年代初,經過40 多年的發展,至今已經掌握了潛標系統關鍵核心技術并取得了豐碩的成果。目前,作為國內潛標系統的主要研制單位,中船重工710 所與715 所、國家海洋技術中心、中科院聲學所與海洋所以及山科院海儀所等單位通過技術創新、自主研發,形成了從近岸到深遠海的各種類型潛標裝備,并積累了豐富的工程實踐經驗[10]。比如,“六五”期間,國家海洋技術中心立項研制FSS1-1 型千米測流潛標系統,自主解決了系泊纜、錨鏈、聲學應答釋放等核心問題,并于1986 年完成FSS1-2 研制工作。此后,國家海洋技術中心相繼開展H/HQB 型海洋潛標系統研發工作,解決了潛標主浮體以上淺表層海流測量問題。“十五”及“十一五”期間,在“863”等課題支持下中船重工710 所開展了實時傳輸海洋潛標系統的研制工作,通過水面浮標與衛星的雙向通訊,攻克了深海潛標數據的實時傳輸問題[11]。另外,山科院海儀所通過定時釋放小型通信浮體的方式將數據發送到指定終端,成功研制了潛標定時傳輸系統。2010 年,中科院海洋研究所研發了6000 m海洋潛標觀測系統,可通過仿真模擬軟件實現對潛標的錨系系統的精準定位布放進行數值計算。此后,在中科院先導科技專項的支持下,2015 年中科院海洋研究所又成功研制了基于衛星通信的實時傳輸潛標觀測系統,并實現了系統在西太平洋海域規模化的應用。
此外,國內其他一些研究機構和高校也開展了潛標系統的研究工作。比如,1998 年哈爾濱工程大學研制了海洋矢量聲場觀測用浮標與潛標系統平臺,通過無線收發終端,能夠實現浮標與潛標的遠程控制[12]。在“863”計劃支持下,中國海洋大學開展了深水定時衛星通信潛標系統的自主研發工作,在2015 年12 月進行了系列海試并順利實現觀測數據的定時回傳[13]。2017 年,西北工業大學與多所科研單位聯合研制深海潛標系統,并在馬里亞納海溝9000 m 處進行了成功布放與回收。同年,中科院海洋所研發垂直剖面實時測量潛標系統,通過數據耦合的方式將觀測數據傳輸到海面通訊浮標。此外,中國電科第三研究所于2019 年針對于水下特殊信號探測需求成功研制了多款潛浮標系統,并于2020年在南海相關海域投入實際使用。
近年來,隨著國內外對水下探測設備的需求日益增加,對于潛標系統的性能要求越來越嚴格,這也對潛標控制系統提出了更高的要求[14]。除了低成本、高性能、長工作時間、大數據存儲容量等要求外,還要求潛標操作便捷、工作模式多樣、數據存儲靈活,并能夠提供更多的輔助信息以便減少其他輔助設備[15-16]。為此,本文從實際應用需求出發,以模塊化方法設計并實現一種基于雙ARM 的水聲信號采集潛標控制系統,可以有效滿足潛標長期低功耗運行、大容量信號采集與數據存儲以及多工作模式與任務管理等需求。
1 系統總體設計
1.1 系統架構
本文設計的水聲信號采集潛標系統硬件主要包括主控模塊、信號采集模塊、數據存儲模塊、水聲通信模塊、電源管理模塊5 部分。其中,主控模塊作為潛標控制系統的核心,運行ARM 嵌入式控制軟件,主要完成系統邏輯控制、通信指令與數據交互、系統狀態監測等功能;信號采集模塊主要負責水聲信號的采集、調理與模數轉換;數據存儲模塊主要根據控制指令并按照預定的格式要求完成數據存儲、導出、刪除等操作;水下通信模塊主要完成潛標與其他通信設備之間的水聲通信;電源管理模塊具有多路電源輸出能力,且能夠根據控制指令完成電源的開關控制。
潛標系統硬件體系結構如圖1 所示。
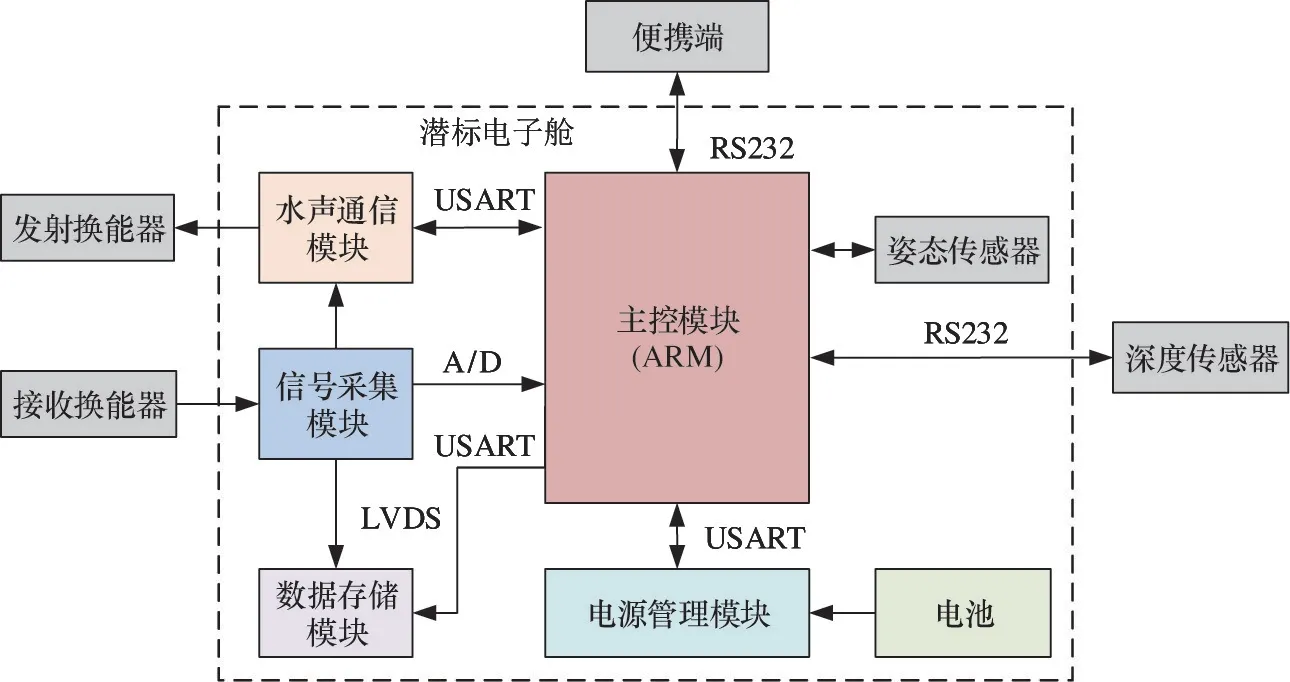
圖1 潛標系統硬件體系結構
在系統硬件設計中,主控模塊與信號采集模塊、電源管理模塊、數據存儲模塊和水聲通信模塊之間通過USART 串口進行通信指令與數據傳輸;主控模塊與深度傳感器和便攜端之間通過RS232 串口進行交互。此外,信號采集模塊與存儲模塊、主控模塊之間分別通過LVDS 接口、單通道A/D 接口進行數據傳輸。
1.2 系統工作原理
當潛標上電后,通過RS232 串口可與便攜端進行通信指令與數據交互,實現對潛標的系統參數設置、任務配置、狀態查詢、自檢等操作。其中,系統參數設置主要包括潛標ID、RTC 時間、電池容量、通信波特率、恢復出廠設置等參數設置;任務配置主要根據不同的應用需求,添加、刪除、更新不同工作模式下的工作任務,以及查詢當前工作模式與任務、任務配置參數與個數等信息;狀態查詢主要實現潛標深度信息、存儲容量信息、電量、姿態等信息查詢操作;自檢主要完成潛標系統各個功能模塊工作狀態的檢查。當潛標的系統參數、工作模式與任務等參數配置完畢以及自檢通過后,可進行潛標的布放操作。
當潛標布設完畢后,主控模塊按照配置的工作模式與任務進行水聲信號采集與數據存儲工作,以及進行水聲通信同步信號的實時監測。首先,主控模塊讀取任務列表并根據其配置信息進行當前工作模式與任務的設置與切換,以及對應地執行信號采集與數據存儲任務。其次,主控模塊進行單通道A/D檢測,實時監測水聲通信同步信號。若檢測到水聲通信同步信號,則主控模塊開啟水聲通信模塊電源并使能水聲通信功能。最后,潛標系統定時監測與分析系統運行狀態,如深度、電量、存儲容量等,并完成狀態信息的日志記錄。
當潛標打撈完成后,通過RS232 串口與網口可對潛標進行存儲數據的導出與刪除、日志導出、狀態查詢等操作。
1.3 系統工作模式
潛標系統工作模式主要有固定時間信號采集模式、信號觸發采集模式和待機模式,3 種工作模式相對獨立且可以相互切換。
(1)固定時間信號采集模式
主控模塊根據當前任務的設定時間(開始時間與結束時間)進行信號采集與數據存儲操作。若當前任務開始時間已到達,則開啟信號采集模塊、數據存儲模塊和姿態傳感器電源,并使能數據存儲功能;若當前任務結束時間已到達,則關閉上述模塊與外設電源并停止信號采集與數據存儲操作。
(2)信號觸發采集模式
與固定時間信號采集模式相比,信號觸發采集模式下的數據存儲操作需要滿足特定的觸發條件才會被執行,即當主控模塊檢測到采集信號的頻域能量滿足一定的閾值條件后,開啟上述與數據存儲相關的模塊和外設電源,并使能數據存儲功能。
(3)待機模式
主控模塊開啟單通道A/D 檢測功能,僅進行水聲通信同步信號檢測,保持最低功耗的值班狀態。
2 控制系統硬件設計
綜合考慮潛標系統的外設接口需求以及最大程度地降低系統功耗,除了選擇低功耗控制芯片等器件外,還對主控模塊的硬件架構進行模塊化、低功耗、擴展性設計[17],提出一種基于雙ARM 架構的潛標控制系統硬件設計方案。
主控模塊硬件系統主要由值班ARM 單元、控制ARM 單元及其外圍電路構成,兩單元之間采用USART 串口通信。其中,值班ARM 作為主控制器,一方面負責系統值班、工作模式與任務管理、信號采集與數據存儲控制以及系統運行狀態監測,另一方面完成與便攜端、深度傳感器、信號采集模塊、電源管理模塊的通信指令與數據交互。控制ARM 作為協處理器,主要完成與值班ARM、姿態傳感器、水聲通信模塊、數據存儲等模塊之間的通信指令以及數據的收發或轉發操作。外圍電路主要包括高精度RTC 時鐘模塊、溫濕壓傳感器、RS232 串口、TF 卡、Flash 等。
主控模塊硬件系統組成框圖如圖2 所示。
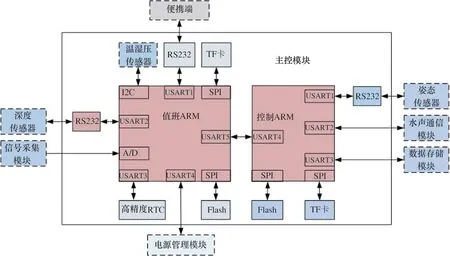
圖2 主控模塊硬件系統組成框圖
值班與控制ARM 芯片均采用ST 公司推出的基于Cortex-M4 內核的高性能、低成本、低功耗STM32L4XX 系列芯片,其內部集成豐富的IO、USART、A/D、I2C、SPI 等接口。通過接口擴展以及搭配相應的接口電路,能夠匹配多種不同通信接口的傳感器,非常適用于外設接口多、功能豐富的潛標控制系統。
主控模塊硬件板卡實物如圖3 所示。
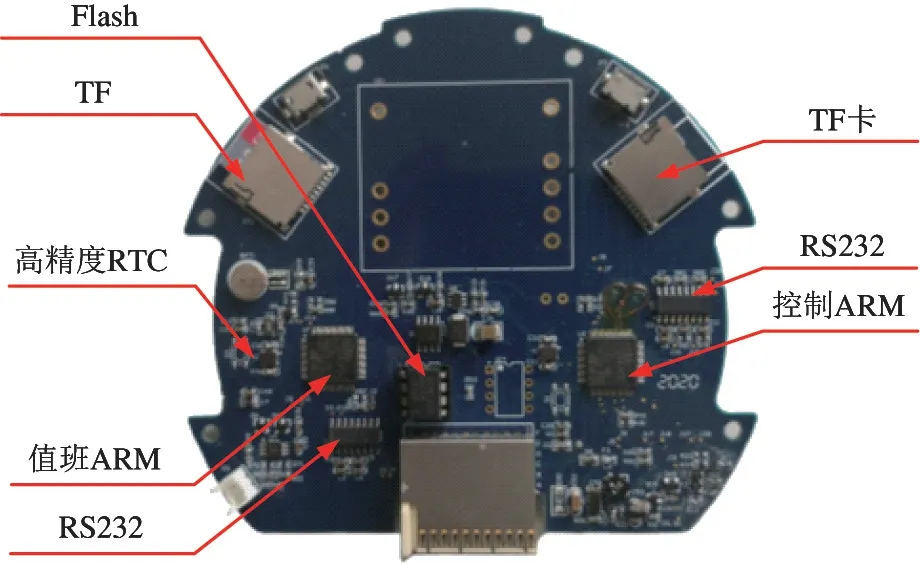
圖3 主控模塊硬件板卡
2.1 值班ARM 單元設計
值班ARM 單元通過接口擴展組成最小值班系統,其接口主要包括1 路I2C、1 路A/D、2 路SPI、3 路USART 和2 路RS232 接口。
通過I2C 接口,可與溫濕壓傳感器進行通信,獲取潛標電子艙內的工作溫度、濕度和壓力信息;通過RS232 接口,可與便攜端、深度傳感器進行通信指令與數據交互,分別實現潛標的系統參數設置、任務下載與更新、狀態查詢、自檢等操作,以及獲取潛標工作深度信息;通過A/D 接口,可進行單通道A/D 檢測,實現水聲通信同步信號的實時監測;通過USART 串口,可與電源管理模塊、控制ARM 單元和高精度RTC 模塊進行通信,分別完成不同模塊電源的開關控制、通信指令與數據交互,以及獲取高精度時間戳信息;通過SPI 接口,可與Flash、TF 卡進行通信,分別實現系統工作參數、任務列表的存儲和系統運行狀態信息的日志記錄功能。
2.2 控制ARM 單元設計
控制ARM 單元硬件接口主要包括2 路SPI、3路USART 和1 路RS232。
通過RS232 接口,可與姿態傳感器進行通信,獲取潛標系統姿態信息;通過USART 串口,可與值班ARM 單元、水聲通信模塊和數據存儲模塊進行通信,實現通信指令與數據交互;通過SPI 接口,可與Flash、TF 卡進行數據傳輸,分別實現系統工作參數的存儲和運行狀態信息的日志記錄功能。
3 控制系統軟件設計
潛標控制系統采用模塊化的軟件設計思想,每個功能模塊均為一個獨立的軟件模塊。潛標系統功能模塊主要有主控模塊、單通道A/D 檢測模塊、工作模式與任務管理模塊、信號采集與數據存儲模塊、電源管理模塊以及狀態監測模塊。
3.1 主控模塊軟件構架
主控模塊作為潛標系統的控制中心,為了完成不同的任務控制需求和信號采集與數據存儲工作,確保潛標系統穩定可靠、低功耗地工作,需要將潛標系統各個功能模塊集成在一起,同時開啟看門狗功能。
主控模塊初始化完成后,接收換能器信號經過信號采集模塊的放大與濾波后輸出至主控模塊值班電路。首先,值班ARM 進行單通道A/D 檢測,判斷是否收到水聲通信同步信號;若檢測到同步信號,則開啟通信模塊電源并使能水聲通信功能,同時接收與處理來自水聲通信模塊的通信指令與數據。其次,工作模式與任務管理模塊根據任務列表的配置信息實現當前工作模式和任務的設置與切換。若在當前工作模式和任務下,單通道檢測結果滿足數據存儲條件,則開啟信號采集模塊與數據存儲模塊電源,并使能數據存儲功能。接著,狀態監測模塊對潛標系統的深度、電量、存儲容量等信息進行定時監測。最后,為防止系統發生嚴重錯誤(如進入死循環、跑飛等)不能恢復,在主控程序每個循環周期內進行喂狗操作。
主控模塊軟件工作流程如圖4 所示。

圖4 主控模塊軟件流程
3.2 單通道A/D 檢測
單通道A/D 檢測模塊作為值班電路中非常重要的一部分,始終處于工作狀態,主要實現合作信號與非合作信號檢測。其中,合作信號為水聲通信同步信號或握手信號;非合作信號為信號強度滿足一定閾值條件的目標信號。
接收換能器信號進入信號采集模塊的調理電路(放大電路和濾波電路)后,信號分成兩路輸出,一路信號輸出至值班ARM 的A/D 接口,進行合作與非合作信號檢測;另一路信號經過信號采集模塊內部的A/D 電路后,直接輸出至數據存儲模塊和水聲通信模塊。單通道A/D 檢測電路信號流如圖5 所示。
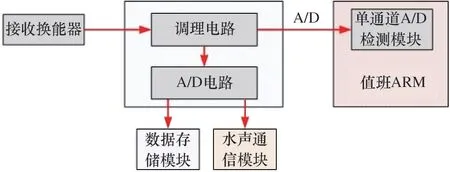
圖5 單通道A/D 信號流
信號傳輸至值班ARM 的單通道A/D 檢測模塊后,值班電路首先根據信號的頻域和脈寬(信號寬度、間隔)檢測結果,判斷該信號是否為合作信號。若檢測結果均滿足合作信號要求,則值班ARM 開啟水聲通信相關板卡電源,并啟動水聲通信處理線程進行通信指令與數據的接收、解析、執行與反饋。若不滿足合作信號條件,則值班電路進行信號頻域能量檢測,判斷該信號是否為非合作信號,若滿足非合作信號條件,則值班ARM 開啟信號采集與數據存儲模塊電源并使能數據存儲功能。
3.3 工作模式與任務管理
工作模式與任務管理模塊主要根據任務列表中的任務配置信息實現潛標系統在不同工作模式下的工作流程控制和任務管理功能。任務列表在潛標布設前可通過便攜端進行配置,也可在潛標布設完畢后通過水聲通信的方式進行設置。每個任務需指定系統工作模式、任務開始與結束時間以及其他工作參數。
為實現多個任務按照設定的順序和配置參數正確執行,工作模式與任務管理模塊采用基于時間分配機制的多任務分時控制策略。首先,在初始化階段,待執行任務被組織為任務列表;然后,根據任務時間配置參數為每個任務分配的運行時間段,并按照時間先后完成任務執行優先級排序。最后,按照優先級依次執行各個任務并實現不同任務之間的切換。
多任務分時控制策略通過合理的時間分配與任務調度,將ARM 的運行時間合理分配給各個任務,每次只執行一個任務,待任務結束之后迅速切換至下一個任務,以此循環往復,從而實現對潛標系統的多工作模式與多任務的分時控制。
工作模式與任務管理模塊軟件工作流程如圖6所示。
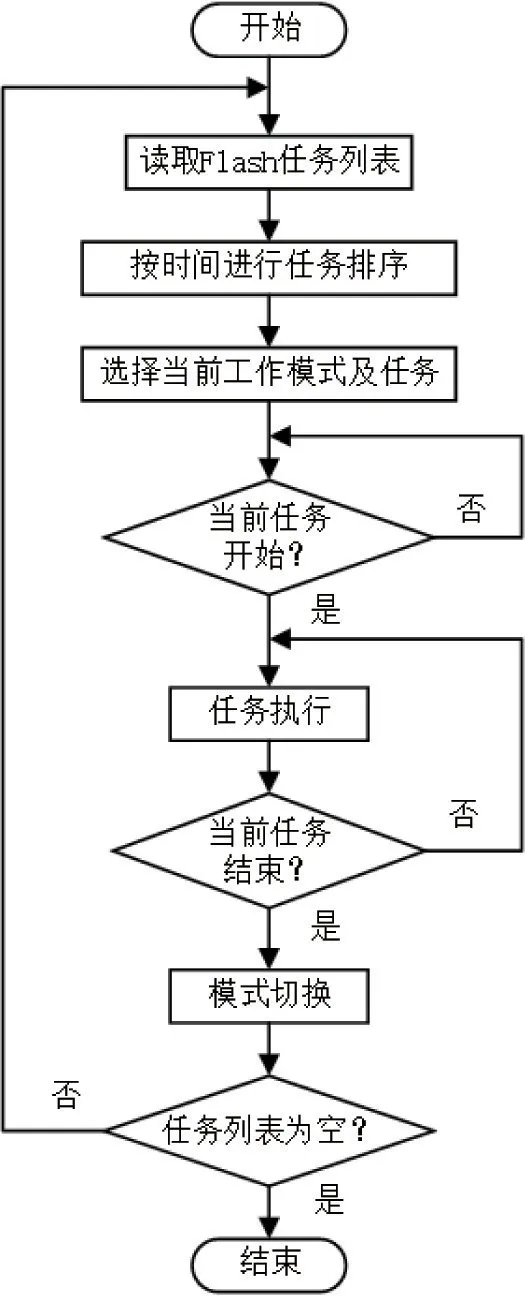
圖6 工作模式與任務管理模塊軟件工作流程
3.4 信號采集與數據存儲
信號采集與數據存儲模塊作為潛標系統核心功能的一部分,主要實現接收換能器信號的A/D 轉換,并根據主控模塊控制指令完成采集數據、時間戳信息與姿態數據的打包存儲功能。
信號采集與數據存儲模塊軟件工作流程如圖7所示。
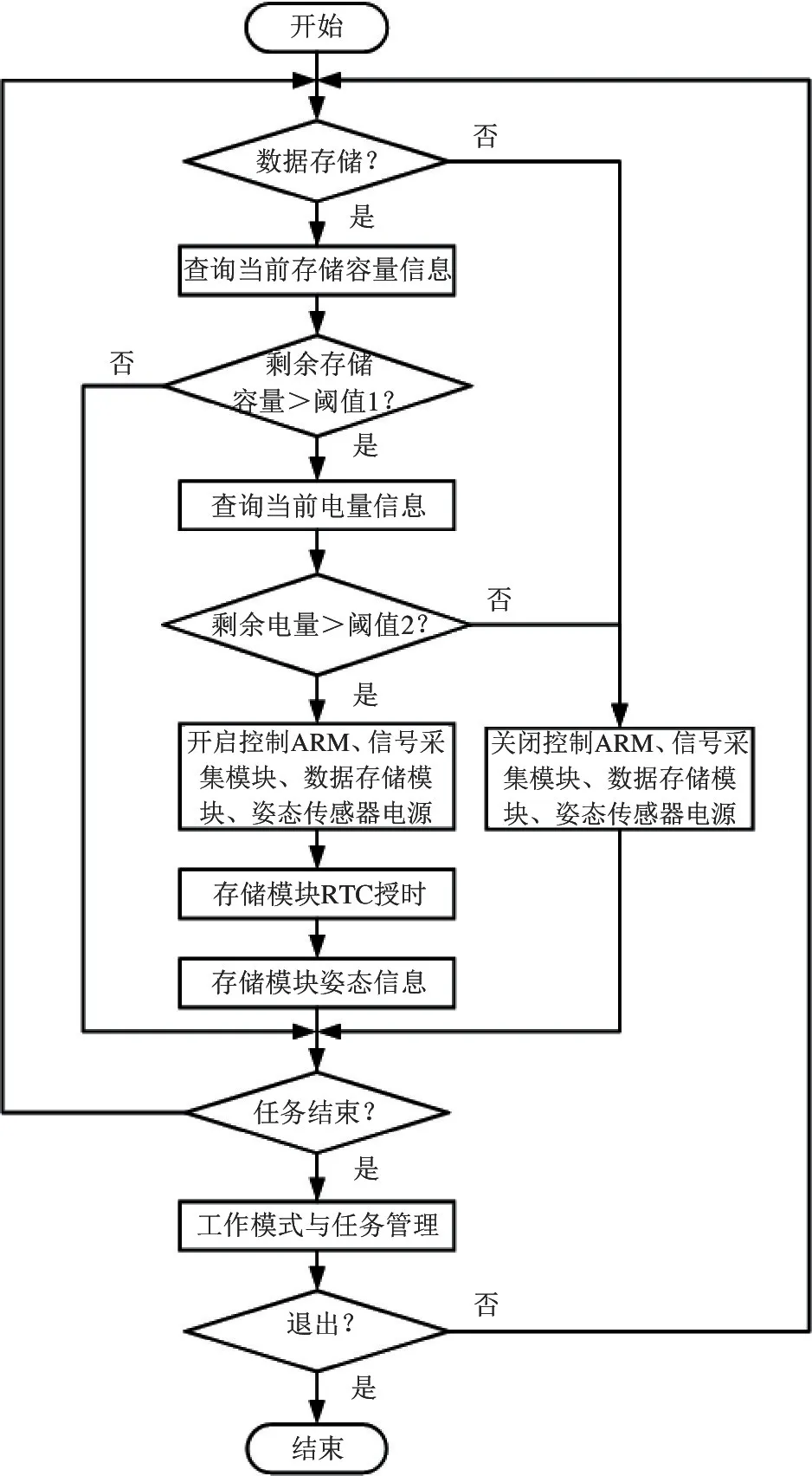
圖7 信號采集與數據存儲軟件工作流程
當檢測到非合作信號后,首先主控模塊查詢當前存儲容量和電量信息。若當前剩余存儲容量和剩余電量均大于設定閾值,則主控模塊開啟控制ARM、信號采集模塊、數據存儲模塊和姿態傳感器的電源,同時使能數據存儲功能;否則,關閉與數據存儲相關模塊電源。其次,主控模塊向存儲模塊發送高精度時間戳信息,進行授時操作。接著,主控模塊定時獲取姿態信息并發送給數據存儲模塊進行姿態信息的更新。最后,當任務結束、剩余存儲容量或剩余電量不滿足預設條件時,則關閉與數據存儲相關模塊電源。
3.5 電源管理
由于潛標電池容量有限,主控模塊需要配合電源管理模塊對潛標系統的工作電源進行管理。電源管理模塊主要完成多路電源轉換,以及根據低功耗策略實現不同功能模塊的電源輸出控制功能。
(1)電源轉換與輸出控制
電源管理模塊能夠對輸入的48 V 電池電壓進行轉換,并根據外設電源需求輸出2 路3.3 V 和5 路5.5 V 的電源。潛標系統電源輸出與可控情況如圖8所示。

圖8 電源管理模塊電源轉換輸出與可控框圖
如上圖所示,值班ARM 和信號采集模塊的調理電路電源均為不可控輸出電源,即保持電源輸出狀態,從而確保值班電路始終處于工作狀態;控制ARM、信號采集模塊的A/D 電路、水聲通信模塊、數據存儲模塊和姿態傳感器的電源均為可控輸出電源,可通過主控模塊控制指令進行電源開關控制。
(2)低功耗控制策略
潛標系統低功耗控制策略主要涉及電源管理和休眠處理。
電源管理是對不同模塊的電源輸出進行控制,即根據系統當前工作模式與任務執行的不同工作流程,合理有序地對不同模塊的電源輸出進行控制,盡可能開啟滿足功能的最少外設電源以及關閉不必要的外設電源,從而達到既滿足設計功能又降低功耗的目的。
休眠處理主要根據實際工作狀態將相關功能模塊處于休眠狀態來降低功耗。例如,當控制ARM在一定時間內未收到任何通信指令或數據時,將關閉外部晶振電路以及采用低功耗的片內振蕩器提供時鐘,進入休眠模式。同時,控制ARM 對外部中斷事件進行實時監測,一旦觸發中斷將快速喚醒并回到正常工作狀態,或者通過定時程序喚醒方式來達到降低系統整體功耗目的。
3.6 狀態監測
狀態監測主要用于實時監測潛標系統運行狀態信息,主要包括電池電量監測、存儲容量監測和深度監測3 部分。為實現以上監測功能,主控模塊軟件中設有定時器固定節拍中斷,該節拍作為狀態監測模塊的計時基準,能夠滿足最快狀態監測任務執行頻度需要。
電池電量監測主要完成各個功能模塊電量消耗統計與剩余電量評估;存儲容量監測主要實現數據存儲模塊已用存儲容量查詢和剩余存儲容量統計,為信號采集與數據存儲的控制提供參考依據;深度監測主要負責潛標工作深度的定時查詢,以便分析潛標系統工作狀態。
4 試驗驗證
為驗證潛標控制系統性能是否符合設計指標要求,將控制系統硬件集成在某型潛標系統的電子艙內并開展一系列水池與近海試驗。其中,近海試驗地點為中國某淺海海域,平均深度大約為60 m,試驗周期為7 d,試驗內容主要包括多工作模式與任務管理、信號采集與數據存儲、狀態監測以及水聲通信等。
試驗所用潛標硬件系統與電子艙實物如圖9 所示。

圖9 潛標硬件系統與電子艙
(1)多工作模式與任務管理試驗
試驗任務設置了3 種不同工作模式,共64 個配置任務。通過任務配置列表、日志記錄、數據存儲記錄等信息,對試驗配置任務執行數量、任務開始時間、任務結束時間、工作模式切換次數等進行比對驗證。
驗證結果表明64 個配置任務的工作模式與任務切換全部正常、任務的開始與結束控制準確,潛標控制系統能夠實現在不同工作模式下的工作流程控制和任務管理功能。
(2)信號采集與數據存儲試驗
根據上述試驗任務,通過對比任務配置列表、試驗日志記錄、數據存儲記錄等信息,首先對數據存儲文件數量、數據存儲文件時間長度、數據存儲文件信息齊套性進行驗證;然后,對存儲數據的正確性進行分析驗證。
驗證結果表明,在所有執行的任務中,潛標控制系統的數據存儲功能正常、存儲的信息(數據、姿態、時間戳)齊全。此外,數據分析結果表明存儲的數據精度高、噪聲較低、通道一致性較好。
(3)狀態監測試驗
根據上述試驗任務,通過查驗任務配置列表與日志記錄內容,對潛標系統運行中的電量、存儲容量、深度等狀態信息進行分析驗證。
驗證結果表明,潛標系統的狀態監測模塊運行正常,電量信息、深度信息、存儲容量信息以及其他運行狀態信息記錄齊全,且記錄內容符合實際潛標運行情況。
(4)水聲通信試驗
水聲通信聲源采用魚唇系統,布放深度15 m,與潛標水平距離約為5 km,通信內容為任務下載、狀態查詢等。通過試驗記錄結果分析以及查驗日志記錄內容,對試驗中的水聲通信同步信號檢測結果、水聲通信內容、通信內容執行與反饋結果等信息進行進一步分析驗證,試驗分析結果如圖10 所示。
由圖10 可知,在淺海多途效應的影響下,潛標控制系統的單通道A/D 檢測模塊仍能以較高成功率檢測到水聲通信同步信號,完成水聲通信指令的收發;同時,控制系統能夠正確執行接收到的每條指令與反饋結果。試驗結果表明,潛標控制系統的單通道A/D 檢測模塊工作正常,能夠檢測到同步信號并使能水聲通信模塊,可實現潛標與甲板便攜端之間的水聲通信指令與數據交互。
(5)低功耗控制策略
為進一步驗證低功耗控制策略的有效性,在水池中對潛標控制系統執行信號采集與數據存儲任務的功耗進行對比試驗,分別比較采用低功耗策略與不采取低功耗策略的潛標連續工作時間。試驗中,潛標電池總容量為7.5 kWh,工作模式為固定時間信號采集模式,單個任務周期為24 h,相鄰任務間隔為5 min,任務數量為40 個。試驗任務以潛標電池剩余電量為0 作為終止條件,試驗對比結果如表1所示。
由表1 可知,采用低功耗控制策略的潛標系統連續工作時長可達624 h,其連續工作時間相對于不采用低功耗控制策略的潛標提高了近152%。因此,低功耗控制策略可以有效提高潛標系統水下連續工作時間。

表1 潛標連續工作時間比較結果
綜上所述,通過水池與近海試驗結果可知,潛標控制系統的各項功能模塊均正常工作,可以完成不同工作模式正常切換與任務正確執行、水聲信號高精度采集與數據有效存儲和水聲通信等控制功能,能夠實現工作深度、存儲容量和電量等狀態信息定時監測,以及實現潛標系統的超低功耗運行,展示了基于雙ARM 的潛標控制系統的可靠性和穩定性,能夠滿足水聲信號采集潛標系統的設計指標要求。
5 結論
本文設計并實現了一種基于雙ARM 控制架構的嵌入式潛標控制系統。合理的工作模式與任務分時控制方法、低功耗電源管理策略以及狀態定時監測等措施,使水聲信號采集潛標系統具有工作模式多樣、數據存儲靈活、功耗低、可靠性高等特點。同時,通過水聲通信方式進行通信指令與數據的交互,提高了潛標系統的使用靈活性和隱蔽性。試驗結果表明,所設計的控制系統運行效果良好,各項功能均滿足指標設計要求,具備水下長期工作的能力,具有較好的工程應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25