基于環境信息和魚類行為的智能投喂系統研究
2021-02-11 05:57:14沈煒皓崔海朋徐以軍
中國新技術新產品 2021年22期
沈煒皓 崔海朋 徐以軍
(青島杰瑞工控技術有限公司,山東 青島 266061)
0 引言
近年來,水產養殖逐步由近海走向深遠海,但不論是何種養殖環境,餌料使用的合理性都將直接影響養殖作業效率、養殖收益以及養殖水體環境[1]。
為降低飼料成本,提高勞動生產率,解決喂料不均勻、不準確等問題,挪威、日本、加拿大等水產養殖強國均研制并使用自動投喂系統[2]。挪威AKVA 公司的Marina CCS自動投喂系統,利用風機高速空氣流,將飼料從下料裝置噴射到主輸送管道,通過分配閥投放至目標網箱內,該系統可提高投餌效率。雖然目前的自動投喂系統可在一定程度上提高投喂準確性及效率,但大多數只可定時、定量、自動投喂控制,無法根據養殖海域水文氣象、水質參數等環境信息及魚類行為信息進行攝食規律分析計算,難以確定最佳投喂方式,及時調控投喂參數[3]。
該文通過采集養殖海域水文氣象、水質參數等環境信息,結合機器視覺技術,獲取魚類圖像,提取魚類圖像特征參數,分析魚類行為及魚類攝食規律,再利用RBF 網絡分析環境信息、魚類行為與魚群攝食量之間的關系,得出最優投喂量,實現科學投喂,從而達到降低餌料成本、提高養殖收益和保護養殖水體環境的目的。
1 環境信息監測系統
環境信息監測系統如圖1 所示,包括養殖海域水文氣象監測子系統、養殖水體水質參數監測子系統,可實現養殖海域環境信息全面感知。
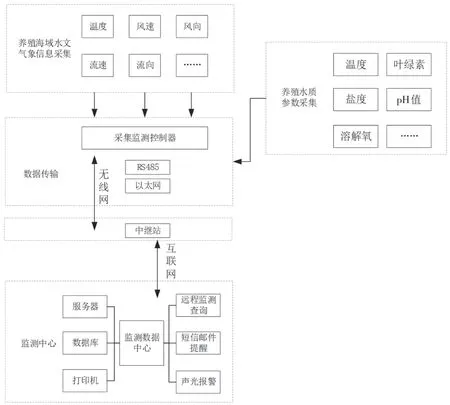
圖1 環境信息監測系統
養殖海域水文氣象監測子系統通過設置高集成度、高靈敏度的智能觀監測浮標,主要由波浪潮位傳感器、氣象一體化傳感器、海洋流速儀、能見度傳感器等組成,實現養殖海域海況的智能化、網絡化觀監測。波浪潮位傳感器可對各監測點潮位、波向、波高、浪高等參數進行監測。氣象一體化傳感器與能見度傳感器配合使用,實現養殖海域氣溫、氣壓、濕度、風速、風向、雨量傳統六要素及能見度等氣象信息的實時觀測。利用海洋流速儀進行養殖海域流速、流向的實時觀監測,輸出準確的流速、流向監測數據,為深海養殖災害預警提供準確可靠的數據保證。
養殖水體水質參數監測子系統是利用多參數水質傳感器,實現養殖區域水質參數的集中監測,包括溫度、葉綠素、溶解氧、鹽度、pH 值、濁度、氨氮等養殖水質參數,為深海養殖監測點區域內資源現狀分析與水質預警提供有效的數據支撐。通過數字通信手段及無線網絡通信技術,將養殖海域的水文氣象、養殖水體水質參數數據傳回岸基控制中心,實現養殖海域水文氣象、水質參數的綜合集中監控,包括浪、涌、流、氣溫、氣壓、濕度、風速、風向、雨量、水質參數等信息。同時,岸基控制中心具備養殖海域水文氣象以及水質參數監測數據的查詢、分析、趨勢曲線顯示等功能,實現數據統計、模型驅動等多樣化的形式展示[4],水文氣象、養殖水質參數的全面數字化處理,可直觀生動地展示養殖海域水文氣象、水質參數的相應信息及變化趨勢,接收由各區域采集的信息,滿足各級用戶水文氣象和水質參數監測數據的查看等需求。
2 魚類行為識別系統
魚類行為識別系統是通過機器視覺、神經網絡等技術,觀測魚類行為的智能識別系統[5]。魚類識別系統硬件裝置如圖2 所示,一般由水下攝像機、圖像視頻采集卡、計算機等組成。其中,水下攝像機是重要組成部分,主要完成水下魚類圖像視頻的采集,實現全方位多角度的魚類行為監視工作。利用圖像視頻采集卡和計算機,可按照需求保留長期的魚類圖像視頻采集資料。管理人員可以在岸基控制中心遠程觀察魚類生長情況。
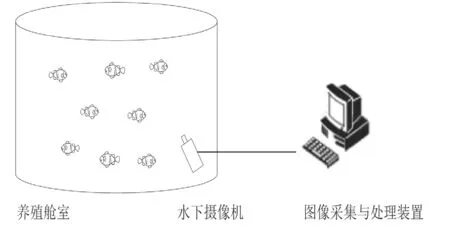
圖2 魚類行為識別系統硬件
魚類行為識別軟件系統針對深海養殖過程中魚類全生命周期內行為識別與分析技術的薄弱性問題,綜合運用多特征融合識別、圖像檢索分析、大數據算法技術,通過構建并優化魚類生長行為匹配模型,深度研究魚類生長識別與產量評估技術、魚類表征病態行為識別技術、水質誘發異常行為識別技術、攝食行為識別技術,突破制約魚類全生命周期生長跟蹤的多元行為識別分析技術,提升魚類科學養殖水平。
基于計算機視覺的魚類生長全過程行為識別技術,通過圖像采集、預處理、運動目標檢測與跟蹤等流程,結合人工智能算法進行魚類行為分析,實現魚類游泳、攝食和體色變化等魚類生長全過程行為識別與量化分析。
利用水下攝像機進行魚類狀態數據采集,對圖像大小、采集頻率、圖像進行存儲,傳輸至智能分析軟件,但因為魚類對海水環境背景具有一定的體色適應性且與海水背景色區分度較小。因此,需要對采集到的魚類圖像進行預處理,然后提取魚類圖像特征,并建立有關魚類行為識別算法模型,分類識別魚類行為[6]。魚類行為識別包括圖像預處理、特征提取、魚類生長信息模型構建等流程,如圖 3 所示。另外,水下攝像機采集到的魚類圖像中存在圖像噪聲,所以在提取特征前,需要進行圖像預處理操作,包括灰度化、圖像增強、濾波去噪等流程[7]。

圖3 魚類行為識別流程
在魚類行為識別建模之前,需要提取魚類特征信息,包括魚類的形狀、大小、紋理、顏色和輪廓等特征信息。建立魚類正常行為的標準樣本數據庫,為魚類行為識別算法的建模提供核心數據。通過計算機圖像識別技術對不同水質、餌料條件下的魚類表征、攝食行為、異常行為進行識別,并與魚類生長周期行為進行樣本匹配,利用權重化特征的卷積神經網絡構建出魚類行為識別模型,建立魚類全生命周期內的生長與評估模型,并制作魚類行為模式檢測器,然后通過魚類行為檢測器對魚類出現的行為模式進行行為樣本匹配,完成魚類行為識別,使魚類智能生長控制的綜合效益達到最優[8]。
3 基于RBF 網絡算法的智能投喂系統
3.1 RBF 網絡算法
高斯形函數(Gaussian)是一種局部響應函數,它是目前最常用的徑向基函數,RBF 網絡能夠實現局部逼近,其逼近性能較強,可按照任意的精度逼近任意連續函數。另外,其具備學習收斂速度快、泛化能力強的特點,在圖像處理、系統建模等方面得到廣泛應用。RBF 網絡結構如圖4 所示。
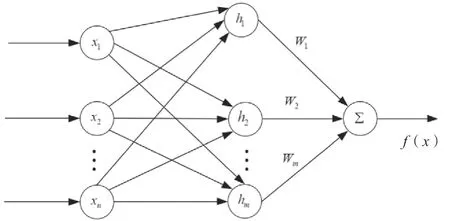
圖4 RBF 網絡結構圖
RBF 網絡算法如公式(1)、公式(2)所示[9]。

式中:x為RBF 網絡輸入;j為隱含層第j個節點;T 為轉置,W*為RBF 的理想權值,設定的RBF 網絡權值自適應律為W;ε為RBF 網絡的逼近誤差;cj為示基函數中心;bj為隱含層第j個節點基帶參數;h(x)為高斯核函數;h(x)由[hj]T組成,hj為高斯基函數輸出;f(x)為理想全值下的RBF 網絡輸出。

3.2 基于環境信息與魚類行為的智能投喂系統
由于目前的深海養殖管控依舊停留在人工經驗判斷的層面,往往會根據經驗粗放地調控養殖投喂等參數,造成不必要的飼料損失。基于養殖海域環境水文氣象、養殖區域水體水質參數等關鍵環境參數及魚類全生命周期資料,利用RBF 神經網絡學習算法,調控投喂量、投喂速度、投喂時間等參數,可提高深海養殖智能化、信息化程度,實現深海養殖精準投喂管控。
將養殖海域水文氣象、養殖水質參數以及魚類行為狀態等變量作為RBF 網絡的輸入,即將風速、風向、流速、水溫、溶解氧、魚類生長階段和魚體大小等對魚類代謝和生長的影響因子作為RBF 網絡的輸入量,并將投喂量、投喂時間、投喂頻率等參數作為RBF 網絡的輸出,根據養殖經驗及專家試驗數據,調整RBF 網絡權值,改變輸出量與各輸入變量間的關系,建立魚類生長對環境因子的響應模型以及魚類的生長預測模型,具體的深海養殖智能投喂流程如圖5所示。 基于已建立的魚類生長對環境因子的響應模型以及魚類的生長預測模型,預測魚類在多環境因素協同作用下的生長速度,并根據魚類的饑餓程度或攝食欲望進行量化,定量判斷魚類行為狀態及關鍵環境參數下的投喂最佳值,建立最佳環境因子知識庫。通過RBF 網絡訓練,不斷完善該數學模型,并通過現場實時信息、魚類行為等進行自動推理和決策,獲得最佳投喂量等參數,通過管控平臺控制投喂系統等相關設備,精準調控投喂時間、投喂量、投喂速度等參數。
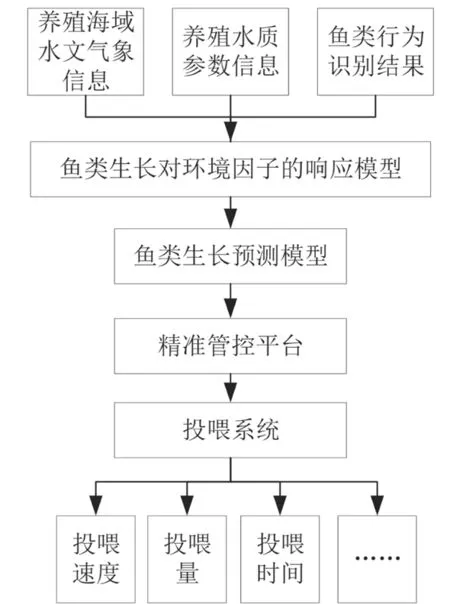
圖5 深海養殖智能投喂流程
4 結論
對機器視覺、RBF 網絡算法等技術的研究,該文建立了基于環境信息與魚類行為的智能投喂系統,該系統能夠采集養殖海域環境信息、養殖水質參數信息及魚類行為狀態,并通過RBF 網絡構建環境信息、魚類行為與魚群攝食量之間的關系模型,分析魚類行為及魚類攝食規律,獲取最優投喂量、投喂時間、投喂時長等參數,實現智能投喂。在實際應用過程中,該系統能夠解決如下問題:1) 提高飼料利用率,降低養殖成本。2) 獲取養殖海域水文氣象等環境信息、養殖水質參數。3) 實現魚類行為的智能識別,并獲得較為準確的魚類攝食規律。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
小讀者(2021年2期)2021-03-29 05:03:48
中國生殖健康(2020年6期)2020-02-01 06:28:50
華人時刊(2019年13期)2019-11-17 14:59:54
當代水產(2019年1期)2019-05-16 02:42:04
中國生殖健康(2019年11期)2019-01-07 01:28:02
文苑(2018年22期)2018-11-19 02:54:14
紅領巾·萌芽(2016年1期)2016-09-10 07:22:44