校園智能送餐機器人的設計與實現(xiàn)
2021-02-11 05:58:56許量為李建勇
中國新技術新產(chǎn)品 2021年22期
許量為 李建勇
(西北工業(yè)大學明德學院,陜西 西安 710124)
0 引言
隨著科學技術的發(fā)展,科技在很大程度上改善了人們的生活。在2020 年1 月初,瑞幸咖啡在美國的發(fā)布會上表示,今后將會推出智能售賣咖啡車,在給顧客提供方便的同時,還能提升自己的銷售額。2017 年,由餓了么未來物流團隊打造的智能外賣機器人“萬小餓”已經(jīng)在上海虹橋萬科中心開始服務,但是它是專門針對城市和辦公寫字樓的送餐機器人。2019 年,美國喬治梅森大學已經(jīng)擁有了校園機器人送餐服務。目前,中國還沒有一款專門針對大學校園的送餐機器人。“萬小餓”的智能化程度很高,但是其自身質(zhì)量很重且造價高昂。雖然續(xù)航時間長,但是每次只能送3 單外賣[1],不適合在校園里配送1 次多單的訂單。與它相比,自主研發(fā)的校園送餐機器人性價比極高,本身就有很好的發(fā)展空間,除了在各大高校中應用,它還可以在各種大型工業(yè)園區(qū)完成戶外送餐的任務,可以在10 min 之內(nèi)或者更短的時間內(nèi)完成送餐任務。校園智能送餐機器人項目的推出可以節(jié)省時間,提高學習和工作效率,在就餐高峰時期還可以減輕食堂的就餐壓力,為學生的宿舍和校園生活提供便利。
1 設計思路
1.1 設計初衷
本著以人為本的設計思路,旨在為學生的宿舍生活提供便利,該文設計了校園智能送餐機器人。現(xiàn)在的大學校園面積較大,飯?zhí)谩⒔虒W樓和宿舍之間的距離都很遠,因此很多同學會因距離而不去吃飯,智能送餐機器人就可以很好地解決上述問題。從另一個角度來說,智能機器人還可以節(jié)省時間、提高學習效率以及節(jié)省食堂送餐的人力、物力和財力,與此同時,還可以提高商家的營業(yè)額,真正做到讓學生足不出戶就能吃到食堂的美味,從而很好地為學生的宿舍和校園生活提供便利。從長遠的角度來看,后期應用到外部市場時,可以解放一定的人力,在節(jié)省成本的同時還可以提高銷售額。
目前,校園智能送餐機器人在各大高校都有一定的商業(yè)市場,可以進一步推廣應用。除了大學食堂以外,還可以在后期技術成熟時,將其推廣到其他市場,例如戶外、商場、大型酒店以及大型工業(yè)園區(qū)等。該技術擁有巨大的市場潛力,在未來智能化的發(fā)展背景下,該技術的應用場景會越來越大。
1.2 設計結構
校園智能送餐機器人由智能車底盤和附加的外賣箱組成,智能車底盤以STM32F103C8T6 最小系統(tǒng)為主控芯片,搭載TB6612FNG 電機驅(qū)動模塊、超聲波避障模塊、18650 可充電電源模塊以及紅外循跡模塊等模塊,可以實現(xiàn)循跡導航、自動避障、藍牙解鎖以及電機調(diào)速等功能。外賣箱部分則分為內(nèi)外2 層,外層采用EPP 保溫塑料,底部配有橡膠防滑墊,具有無毒無味、不易變色、表面光滑、容易清洗、保溫效果好、不怕摔碰以及可重復使用等優(yōu)點。
1.3 控制系統(tǒng)設計
控制系統(tǒng)中很重要的一部分就是系統(tǒng)負反饋,通過程序判斷各項功能是否正常、循跡是否成功、電機運轉加減速是否正常以及是否有障礙物。判斷結束后,如果存在問題,那么微型計算機會根據(jù)特定的算法進行計算,并對其進行調(diào)整修正,如果沒有問題就正常執(zhí)行任務。在該設計中,避障模塊采用的算法是局部避障動態(tài)窗口法(DWA)算法,該算法可以讓送餐機器人及時避讓障礙物;紅外循跡模塊采用比例積分微分(PID)位置算法來計算它是否偏移預定軌跡(偏移了多少),便于送餐機器人調(diào)整路線;電機驅(qū)動模塊則是通過MATLAB 仿真擬合出平滑的S 曲線,提出不同約束條件下的S 曲線平滑度控制指標,通過將S 曲線離散化分為多個脈沖頻段來控制電機的穩(wěn)定運行以及加減速,使送餐機器人適當?shù)販p速并順利完成轉彎動作。系統(tǒng)設計圖如圖1 所示。
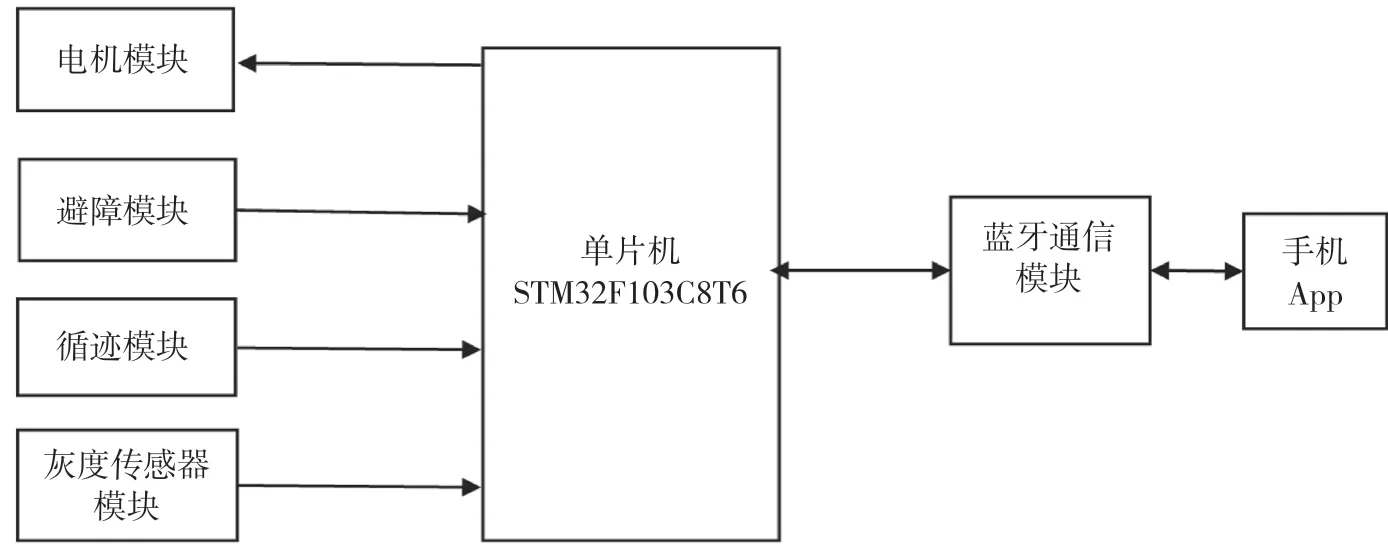
圖1 智能送餐機器人系統(tǒng)設計圖
1.4 送餐流程
啟動系統(tǒng),搜索并連接藍牙系統(tǒng),連接成功后開始進行循跡,否則重復連接藍牙步驟直到連接成功,循跡成功后繼續(xù)前進,否則修正方向直到循跡成功。如果碰到障礙則原地等待,障礙被移除后繼續(xù)前進直到指定位置,在指定位置停止并發(fā)送信號等待取餐,如圖2 所示。
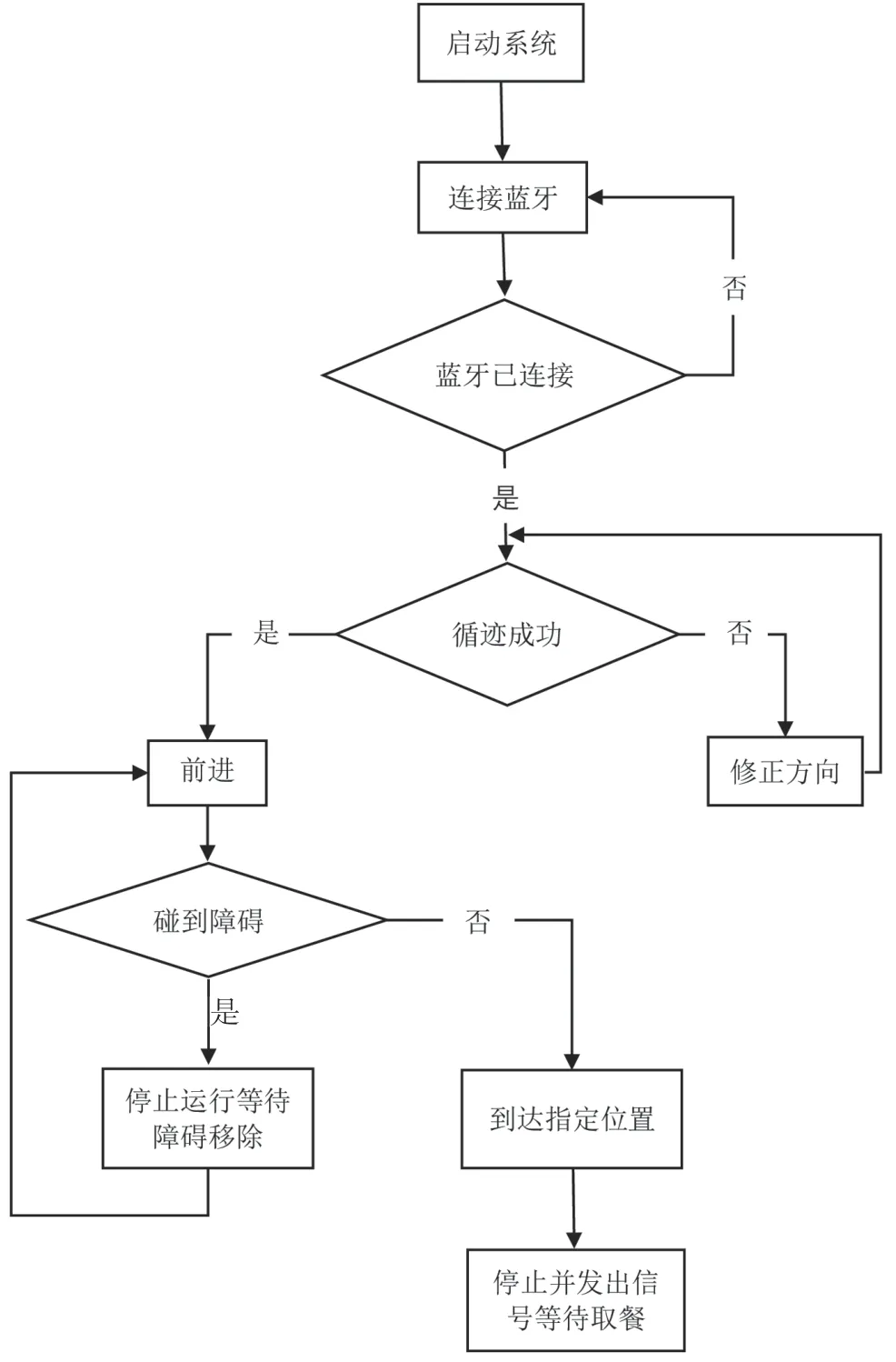
圖2 送餐流程圖
2 硬件系統(tǒng)
2.1 循跡模塊
選擇紅外循跡模塊需要考慮2 個方面,循跡點個數(shù)的多少和周圍光線的變化程度。循跡點的個數(shù)越多循跡結果也越精確,因為周圍光線的變化對循跡也有一定的影響,所以必須考慮周圍光線的影響,選擇受周圍環(huán)境變化影響較小的循跡模塊。該系統(tǒng)中的循跡部分由4 個紅外循跡模塊共同組成智能送餐機器人的“眼睛”,引導智能送餐機器人沿著軌道線行進。紅外循跡模塊使用4 個發(fā)射管發(fā)射紅外光線,當光線照射到黑色軌跡和周圍其他色系的環(huán)境上時,根據(jù)反射強度的不同,接收端接收到不同強度的反射光線,根據(jù)發(fā)出反射光線的強弱程度來判斷軌道的位置,通過系統(tǒng)負反饋,基于PID 位置算法能夠使智能送餐機器人及時回到正確的軌跡。如果光線到達指定位置時的顏色不是黑色,那么傳感器發(fā)射出去的紅外光大部分都會被反射回來[2]。模塊化的設計使安裝過程更加方便快捷,其電路圖如圖3 所示。紅外循跡模塊的價格低廉,體積小巧方便,工作環(huán)境也很廣泛,能夠在不同溫度范圍下使用,而且在不同的環(huán)境中都能夠穩(wěn)定、可靠地運轉,因此該設計選用紅外循跡模塊。
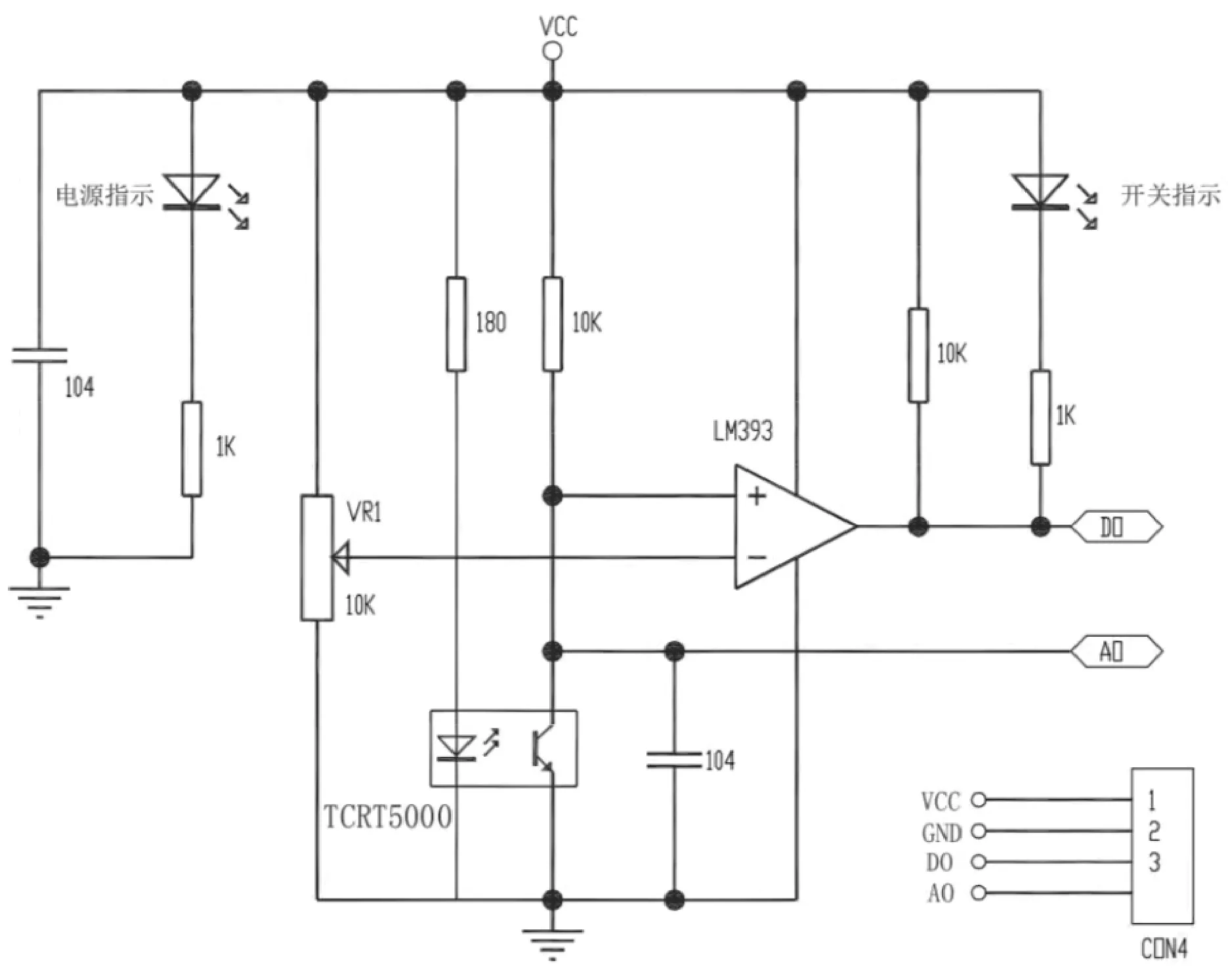
圖3 循跡模塊電路圖
2.2 灰度傳感器模塊
灰度傳感器包括1 個白色高亮發(fā)光二極管和1 個光敏電阻,發(fā)光二極管照射到灰度不同的地面上返回的光是不同的,根據(jù)光(光敏電阻接受到返回的光)的強度差異,光敏電阻的阻值也不同,可以對灰度值進行測試,從而實現(xiàn)識別定位的功能。到達指定位置后,送餐機器人會停下來給藍牙通信模塊發(fā)送指令,然后通過藍牙向賣家發(fā)送提示信息并等候取餐。
2.3 超聲波避障模塊
校園智能送餐機器人中的避障模塊選用HC-SR04 模塊,該模塊擁有性能穩(wěn)定、測度距離精確、模塊高精度以及盲區(qū)小等優(yōu)點。在運送途中,送餐機器人很難一直保持自身的絕對平穩(wěn)和穩(wěn)定,探測系統(tǒng)也很難精準地探測其真實的距離,1 個超聲波傳感器很難對整個面進行測量,而且超聲波模塊具有擴散性,并且超聲波在不同介質(zhì)中傳播速度會變得更為穩(wěn)定[3],考慮上述特性,該設計在避障方面選擇采用多個超聲波避障模塊協(xié)同運作。
2.4 電機驅(qū)動模塊
該設計選擇TB6612FNG 直流電機作為驅(qū)動模塊,它不但可以同時驅(qū)動2 個電機,而且不需要外加散熱片,外圍電路設計也很簡單方便,只要外部接上電源濾波電容就能直接驅(qū)動電機運行。直流電機的控制原理是根據(jù)定子的繞線來決定啟動(或者關閉)換流器中功率晶體管的先后順序,使電流依次流經(jīng)線圈產(chǎn)生的磁場并與轉子相互作用,使電機隨所產(chǎn)生磁場的方向來轉動,要使轉子停止轉動,則需要關閉功率晶體管。要使電機轉子反向轉動,則需要調(diào)換功率晶體管的開啟順序。
2.5 藍牙通信模塊
該系統(tǒng)使用 HC-06 無線藍牙通信模塊,HC-06 藍牙模塊的優(yōu)點是配對以后默認使用全雙工的串口模式,不需要了解藍牙協(xié)議,可以使用無奇偶校驗的通信模式[4]。藍牙通信技術用無線的方式將各種數(shù)據(jù)和設備連到同一個微網(wǎng)下,可以在這些連接設備之間實現(xiàn)快捷且方便的通信。能夠?qū)崿F(xiàn)手機和送餐機器人之間的藍牙通信,主控芯片和各部分模塊接收到的指令都是通過藍牙傳輸?shù)模ㄟ^藍牙接口傳到接收端,通過A/D、D/A 之間的轉換成為各種模擬信號。接收信號時,將接收端開關設置為開啟狀態(tài),天線端接收射頻信號后,經(jīng)過藍牙收發(fā)器將其傳輸給基帶信號處理器。
3 軟件系統(tǒng)設計
3.1 電機驅(qū)動控制設計
電機驅(qū)動軟件是設計該機系統(tǒng)的基礎,通過手機軟件可以控制智能小車行進的快慢和轉向,通過電壓反饋調(diào)整其脈沖寬度調(diào)制占空比,進而調(diào)節(jié)和驅(qū)動智能送餐機器人。利用微處理器的數(shù)字輸出來對模擬電路進行控制,采用差動轉向來控制機器人的轉向,差動轉向就是一個輪子的轉速比另外一個輪子快或者慢,使2 個輪子速度不一樣,從而達到轉向的目的。通過調(diào)節(jié)脈沖寬度來改變輸出電壓,通過改變周期來控制輸出頻率,通過改變PWM 波、脈沖寬度等方式來控制電機速度。
3.2 藍牙程序設計
藍牙程序一共有2 個部分:1) 主控芯片上的程序。需要對其進行初始化串口,通過編程為其收到的指令設定對應的動作邏輯,以方便控制機器人運行。2) 手機、平板以及電腦等控制端的軟件程序。可以使用APICloud 開發(fā)平臺制作軟件,使用可視化工具快速構建應用程序,這樣就可以通過該軟件給藍牙傳輸數(shù)據(jù),然后通過藍牙進行數(shù)據(jù)傳輸,進而控制主控芯片運行機器人。
4 運行分析
4.1 運行原理
該設計采用C 語言,通過Keil uVision5 編寫程序, 設計基于機智云和主控制器核心芯STM32F103C8T6 的智能送餐系統(tǒng), 配備ESP8266-01 Wi-Fi 模塊、藍牙模塊、繼電器控制模塊、TB6612FNG 電機驅(qū)動模塊、HDF70-818 攝像模塊、光照傳感器模塊、AS608 識別模塊、RCC522 模塊、HC-SR04 超聲波模塊、LED 顯示模塊以及LED 顯示模塊,采用PCB 制板連接外圍電路。當硬件部分連接并上電后, STM32F103C8T6最小系統(tǒng)開始工作, 因此在主程序設計部分,首先要對其各種功能進行初始化。在初始化系統(tǒng)時鐘、GPIO 口、串口以及定時器后,再初始化各個傳感器I/O 口。當傳感器觸發(fā)任務時, 將根據(jù)優(yōu)先級按(從高到低的順序)依次執(zhí)行任務。
4.2 運行測試
選取一處封閉路段,設計黑色的運行路線軌道,為了檢測機器人的減速和轉向功能,將軌道設計為橢圓型,并在行進途中放置障礙物,以測試其避障功能。分別在不同的運行狀態(tài)下檢測智能送餐機器人的運行速度。測試結果見表1。

表1 送餐機器人運行速度測試結果
5 結語
該文設計的校園智能送餐機器人采用STM32F103C8T6最小系統(tǒng)為控制核心,外加HC-SR04 超聲波模塊、紅外循跡模塊、藍牙模塊以及繼電器控制模塊等模塊,可以實現(xiàn)智能送餐車的自動循跡、自動避障、自動調(diào)速以及定位等功能。為餐廳節(jié)省了送餐的人力、物力和財力,與此同時,還擴大了餐廳的營業(yè)額。真正做到讓學生足不出戶就能吃到食堂的美味。經(jīng)過實驗測試,校園智能送餐機器人實現(xiàn)了預期的功能并且得到了商家的青睞。
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
琴童(2017年3期)2017-04-05 14:49:04
小天使·二年級語數(shù)英綜合(2017年3期)2017-04-01 17:17:48
中學生天地(A版)(2015年5期)2015-06-01 02:46:03