濱海核電冷源取水口攔污網(wǎng)網(wǎng)兜抽吸裝置工作船運動響應(yīng)分析
2021-02-11 05:57:14付建明于廣錄
中國新技術(shù)新產(chǎn)品 2021年22期
關(guān)鍵詞:環(huán)境
付建明 王 濤 于廣錄 王 冰 閆 俊
(1.遼寧紅沿河核電有限公司,遼寧 大連 116001;2.大連鴻澤泵業(yè)有限公司,遼寧 大連 116036;3. 大連理工大學(xué),海岸和近海工程國家重點實驗室,遼寧 大連 116024)
0 引言
由于大量海生物的出現(xiàn),核電站經(jīng)常發(fā)生海生物和漂浮物進(jìn)入冷源入水口的事件,從而造成核電廠冷源系統(tǒng)堵塞[1-2]。目前,核電站采用傳統(tǒng)“網(wǎng)兜攔截+人工海上漁船駁運清理”的方式來防護(hù)冷源系統(tǒng),這種方式效率低且夜間作業(yè)風(fēng)險高,會直接對核電站安全運行造成影響[3]。因此,遼寧某公司和大連某公司聯(lián)合設(shè)計、制造了一種冷源取水口攔污網(wǎng)網(wǎng)兜海生物抽吸裝置,將其安裝在工作船上,將被攔截入網(wǎng)兜的海生物和漂浮物輸送到海面,并運送至指定地點,代替?zhèn)鹘y(tǒng)人工海上漁船駁運清理冷源入水口攔截網(wǎng)兜中海生物的作業(yè)方式,該裝置可以在設(shè)計工況下全天候、無間斷地開展清理作業(yè),徹底解決人工海上漁船駁運清理存在的安全隱患,提高經(jīng)濟效益,保障冷源安全。冷源取水口攔污網(wǎng)網(wǎng)兜抽吸裝置工作船在進(jìn)行工作時,啟動錨機系統(tǒng),拋錨索固定,將海生物切割裝置調(diào)整至工作狀態(tài),連接網(wǎng)兜,即可在操作臺上按要求模式進(jìn)行抽吸作業(yè)。因此,需要根據(jù)具體工作的海洋環(huán)境條件對工作船的運動響應(yīng)進(jìn)行分析,獲取關(guān)鍵位置的運動響應(yīng)結(jié)果,評估其抽吸工作的安全性能。
1 工作船設(shè)計需求
1.1 工作海況條件
根據(jù)船體的對稱性,考慮風(fēng)、浪和流環(huán)境荷載入射方向與船長方向的夾角為0°~180°(風(fēng)、浪和流共向),如圖1所示。選取2 級海況波浪,3 級風(fēng)風(fēng)速,具體的環(huán)境參數(shù)值見表1。
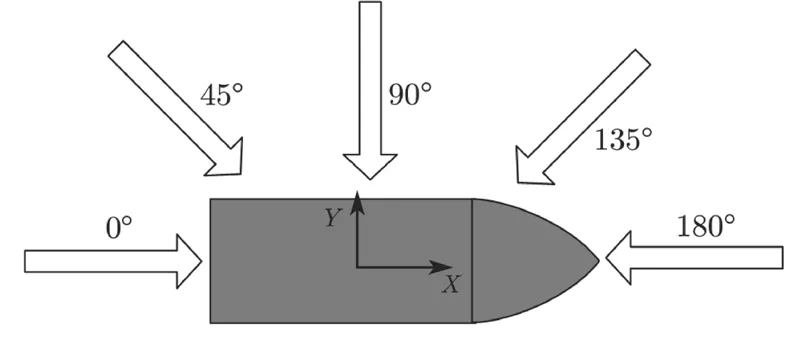
圖1 工作船環(huán)境荷載入射方向

表1 作業(yè)工況環(huán)境參數(shù)
1.2 運動響應(yīng)限制
工作船結(jié)構(gòu)示意圖如圖2 所示。工作船能夠承載提升裝置、輸送泵系統(tǒng)、滿負(fù)荷為1 m3的過濾箱、錨機以及就地控制柜等設(shè)備和4 名操作人員,工作臺設(shè)計有4 個錨絞機和導(dǎo)纜孔,以保證工作船水下連接網(wǎng)兜位置處的耦合裝置的漂移范圍不超過1.5 m。

圖2 工作船結(jié)構(gòu)示意圖
2 運動響應(yīng)分析模型
根據(jù)工作船的運行情況,建立其對應(yīng)的簡化運動響應(yīng)分析模型,如圖3 所示。工作船會受到風(fēng)、浪以及流環(huán)境的聯(lián)合作用。
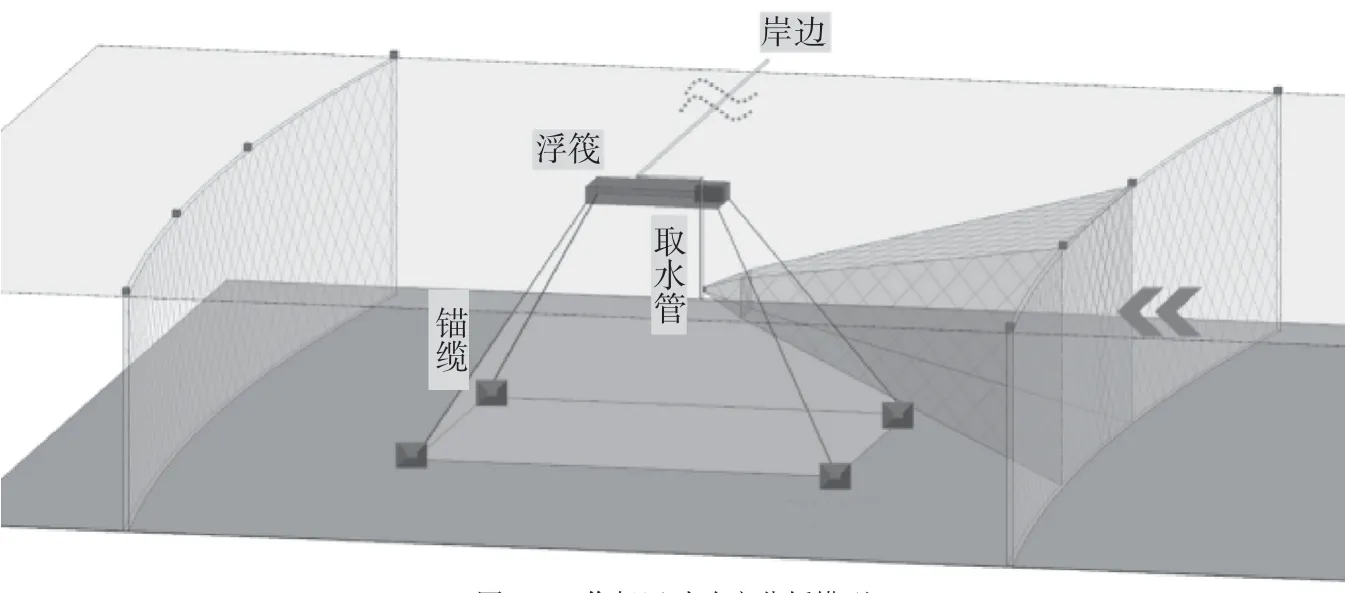
圖3 工作船運動響應(yīng)分析模型
2.1 環(huán)境荷載計算
2.1.1 波浪荷載
采用勢流理論對規(guī)則波作用下浮式結(jié)構(gòu)物的輻射和繞射進(jìn)行分析。假設(shè)浮式結(jié)構(gòu)物所受的一階波浪力由波浪激勵力和輻射力組成,二者可以線性疊加。其中,波浪激勵力可看作是由入射力和繞射力組成的,輻射力是由浮式結(jié)構(gòu)物運動引起的流體反作用力,由附加質(zhì)量力和輻射阻尼力組成。
對受到簡諧波浪作用的浮式結(jié)構(gòu)物來說,其周圍流場速度勢可以分解為入射勢、輻射勢和繞射勢3 個部分[4],如公式(1)所示。

2.1.2 風(fēng)荷載
對非超大型原油運輸船(Very Large Crude Carrier,VLCC)船型浮式結(jié)構(gòu)來說,可以通過模塊法來計算風(fēng)力和風(fēng)力矩。根據(jù)API RP 2SK 規(guī)范[5],風(fēng)力計算如公式(2)所示。

式中:FW為風(fēng)力;CW為風(fēng)力系數(shù);CS為構(gòu)件形狀系數(shù);Ch為構(gòu)件高度系數(shù);A為構(gòu)件迎風(fēng)面的垂向投影面積;VW為設(shè)計風(fēng)速。
2.1.3 流荷載
對非VLCC 船型浮式結(jié)構(gòu)來說,可以根據(jù)模塊法來計算流力和力矩。根據(jù)API RP 2SK 規(guī)范[5],流力計算如公式(3)所示。

式中:FC為流力;CC為流力系數(shù);Cd為拖曳力系數(shù),對圓形單元取0.5,對平面單元,可參考圖 4 取值;Ac為水線面下圓柱形構(gòu)件的投影面積總和;Af為水線面下平板構(gòu)件的投影面積;Vc為來流速度。

圖4 平面單元的流力系數(shù)
2.2 時域耦合運動方程
浮式結(jié)構(gòu)物在海上作業(yè)時會受到各種外界力的作用,通常包括風(fēng)、浪以及流等所產(chǎn)生的海洋環(huán)境載荷和定位系統(tǒng)所產(chǎn)生的系泊力等,會導(dǎo)致浮式結(jié)構(gòu)物產(chǎn)生6 個自由度的運動。浮式結(jié)構(gòu)及其系泊系統(tǒng)總體運動如公式(4)所示[6]。

式中:x˙˙、x˙和x分別為浮式結(jié)構(gòu)物的6 個自由度運動的加速度、速度和位移;M為浮式結(jié)構(gòu)質(zhì)量矩陣;Ma為附加質(zhì)量矩陣;C為線性阻尼矩陣;K為靜水剛度矩陣;Fws為作用在浮式結(jié)構(gòu)物上的平均波浪漂移力;Fwf為波頻力;Fsd為波浪低頻慢漂力;Fwind為風(fēng)力;Fcurent為流力;Fmooring為系泊力。
3 計算結(jié)果與分析
3.1 水動力模型
首先,利用船體建造組立圖,通過三維建模軟件CATIA 建立工作船的三維質(zhì)量模型,包括船體外殼、船體內(nèi)部艙壁、船體內(nèi)部型材以及船體駕駛室等,如圖5 所示。計算船體重心、質(zhì)量以及轉(zhuǎn)動慣量等參數(shù),結(jié)果見表2,其中,Gx、Gy和Gz分別為工作船重心的x坐標(biāo)、y坐標(biāo)和z坐標(biāo),坐標(biāo)原點設(shè)置在船艉底部船中處,Ixx、Iyy和Izz分別為工作船對x軸、y軸和z軸的轉(zhuǎn)動慣量。

表2 清潔船質(zhì)量、重心和轉(zhuǎn)動慣量
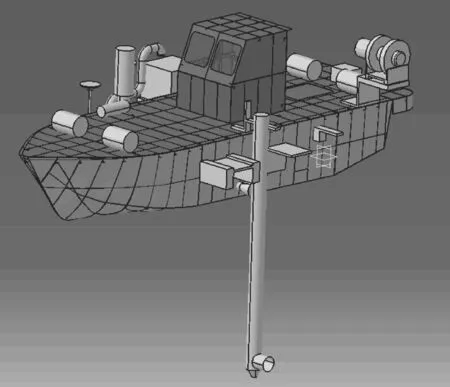
圖5 工作船三維質(zhì)量模型
其次,采用ANSYS APDL 建立船體的幾何外形并剖分網(wǎng)格,得到船體的三維水動力模型,如圖6 所示。利用宏命令A(yù)NSTOAQWA將ANSYS 中的面元模型導(dǎo)為AQWA-LINE 的計算文件,采用AQWA-LINE 計算該船體的水動力參數(shù)。選取周期分布為3 s~20 s 的單位振幅的規(guī)則波作為荷載,考慮船體的對稱性,計算不同波浪入射角度(與X軸的夾角為0°、45°、90°、135°和180°)時該船體的水動力系數(shù),部分水動力結(jié)果如圖7 所示。其中,圖7(a)~圖7(c)中繞射力包括不同頻率單位振幅規(guī)則波入射勢和繞射勢引起的作用力,圖7(d)~圖7(f)中RAO 表示不同頻率單位振幅規(guī)則波引起的浮體運動響應(yīng)幅值。

圖6 工作船三維水動力模型
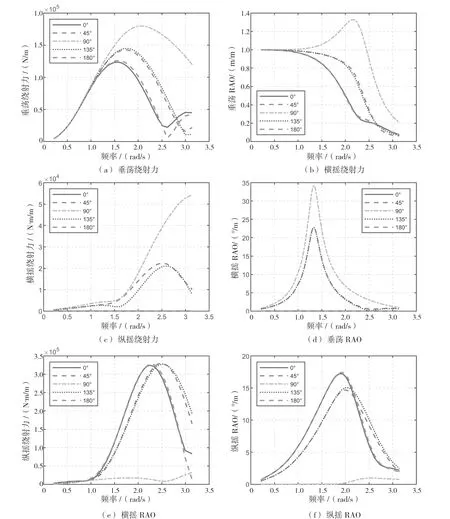
圖7 工作船水動力系數(shù)
3.2 時域響應(yīng)
考慮表1 中的環(huán)境荷載以及圖1 中的不同入射方向,分析工作船重心位置縱蕩、橫蕩、垂蕩、縱搖、橫搖和艏搖6 個自由度位移響應(yīng)。同時,分析工作船水下連接網(wǎng)兜位置處的位移響應(yīng),運動響應(yīng)統(tǒng)計值見表3(0°方向環(huán)境荷載作用的結(jié)果如圖8 所示)。
從圖8 和表3 可知,工作船在系泊作業(yè)工況且入射角度不同的特定環(huán)境荷載作用下,其縱蕩自由度最大響應(yīng)發(fā)生在環(huán)境荷載0°入射時,最大值為0.413 m;橫蕩自由度最大響應(yīng)發(fā)生在環(huán)境荷載90°入射時,最大值為-0.433 m;垂蕩自由度最大響應(yīng)發(fā)生在環(huán)境荷載90°入射時,最大值為0.319 m;橫搖自由度最大響應(yīng)發(fā)生在環(huán)境荷載90°入射時,最大值為4.19°;縱搖自由度最大響應(yīng)發(fā)生在環(huán)境荷載0°入射時,最大值為2.33°;艏搖自由度最大響應(yīng)發(fā)生在環(huán)境荷載135°入射時,最大值為0.953°;環(huán)境荷載0°入射時,網(wǎng)口X向位移最大,為0.572 m;環(huán)境荷載90°入射時,網(wǎng)口Y向位移最大,為-0.653 m;網(wǎng)口Z向最大位移為0.488 m,發(fā)生在環(huán)境荷載90°入射時。
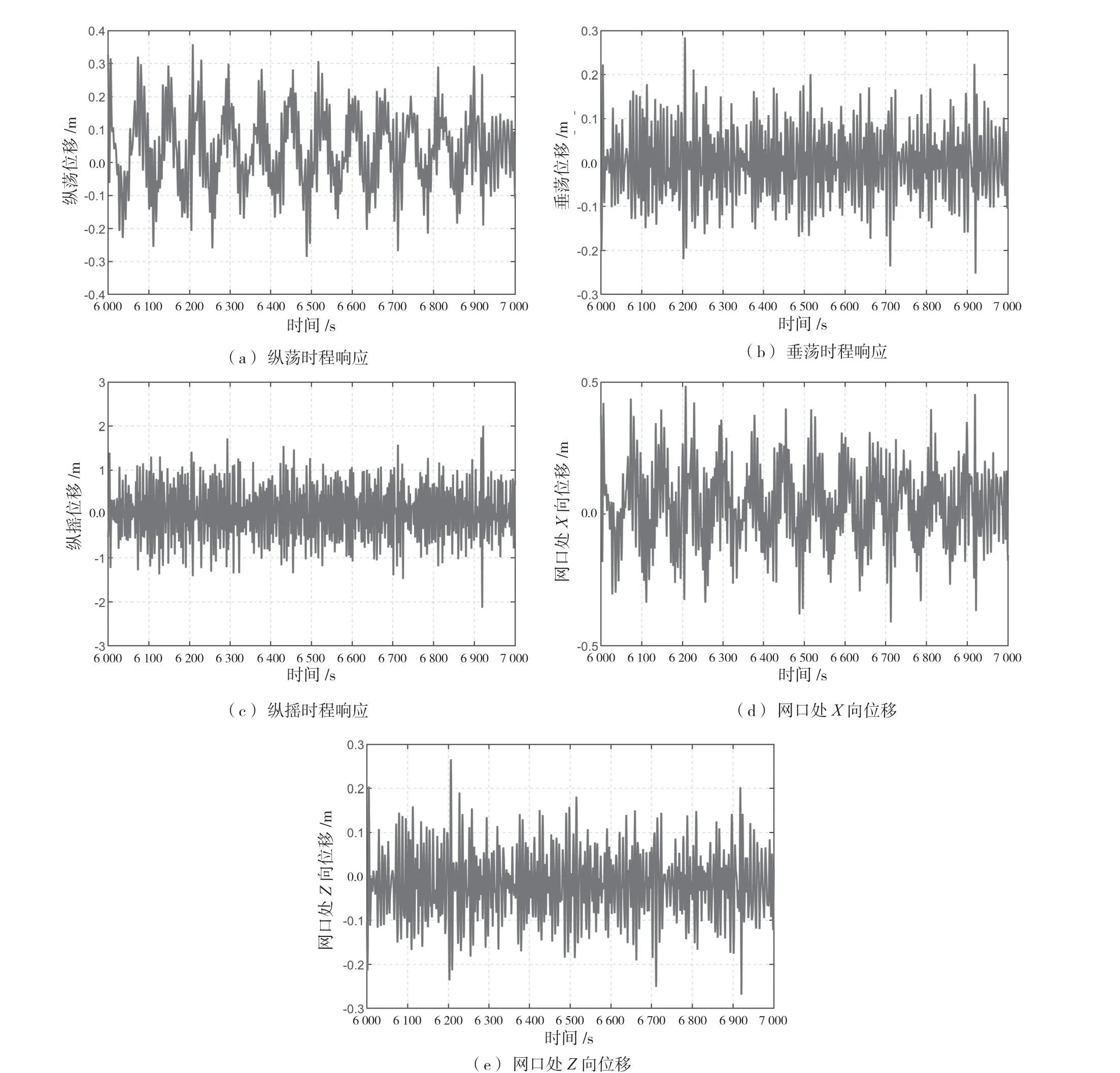
圖8 工作船位移響應(yīng)(0 度方向環(huán)境荷載作用)

表3 作業(yè)工況的響應(yīng)統(tǒng)計值
4 結(jié)論
對核電站冷源取水口攔污網(wǎng)網(wǎng)兜抽吸裝置工作船在系泊作業(yè)工況條件下的運動響應(yīng)進(jìn)行數(shù)值分析可以得出以下2個結(jié)論:1)建立的工作船運動響應(yīng)計算模型可以準(zhǔn)確計算整體裝置的響應(yīng)并評估其設(shè)計安全。2)在給定的環(huán)境工況條件下,設(shè)計的工作船系泊狀態(tài)下能夠滿足水下連接網(wǎng)兜位置處的運動響應(yīng)約束限制,保證整體裝置良好地運行。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學(xué)院學(xué)報(2017年2期)2017-04-20 08:44:31
中國環(huán)境監(jiān)察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38