基于多目標(biāo)可靠性優(yōu)化平臺(tái)的車身前部結(jié)構(gòu)設(shè)計(jì)*
2021-02-06 11:34:54高豐嶺燕唐戰(zhàn)楠卜曉兵
汽車技術(shù) 2021年2期
高豐嶺 燕唐 戰(zhàn)楠 卜曉兵
(中汽研汽車檢驗(yàn)中心(天津)有限公司,天津 300300)
主題詞:多目標(biāo)可靠性優(yōu)化 車身結(jié)構(gòu)優(yōu)化 序列更新代理模型 概率充分因子
1 前言
車身研發(fā)是復(fù)雜的系統(tǒng)問(wèn)題,需要考慮包括結(jié)構(gòu)耐撞性,靜、動(dòng)態(tài)力學(xué)特性及輕量化水平等多種因素。與僅提供1個(gè)最優(yōu)解的單目標(biāo)優(yōu)化相比,多目標(biāo)優(yōu)化在車身設(shè)計(jì)中更常用,其可為設(shè)計(jì)人員提供由一系列折衷方案組成的帕累托最優(yōu)前沿(Pareto Optimal Front,POF),以便后續(xù)決策[1]。
在實(shí)際工程問(wèn)題中,制造公差、載荷條件、材料特性、幾何結(jié)構(gòu)等存在一定程度的不確定性[2],為了避免執(zhí)行確定性多目標(biāo)優(yōu)化時(shí)得到實(shí)際不可靠、不可行的設(shè)計(jì)方案,考慮上述不確定性因素開(kāi)展車身結(jié)構(gòu)多目標(biāo)可靠性優(yōu)化設(shè)計(jì)十分必要。國(guó)內(nèi)外學(xué)者在此方面開(kāi)展了大量的研究工作。Shetty 和Nilsson[3]對(duì)B 柱總成的側(cè)面耐撞性設(shè)計(jì)進(jìn)行了研究,比較了多目標(biāo)確定性、可靠性和魯棒性優(yōu)化結(jié)果。Duan 等人[4]提出了一種改進(jìn)的多目標(biāo)可靠性優(yōu)化方法,并應(yīng)用于概念車身設(shè)計(jì)。Lv 等人[5-6]分別實(shí)現(xiàn)了汽車前端和保險(xiǎn)杠系統(tǒng)的多目標(biāo)可靠性優(yōu)化。在這些研究中,代理模型在提升優(yōu)化效率方面起到了重要作用,但代理模型的構(gòu)造更多憑借工程經(jīng)驗(yàn),如何兼顧優(yōu)化精度與效率仍需深入研究。
改善代理模型從而保證優(yōu)化精度的方法通常有2種[7]。一種是一步構(gòu)造高質(zhì)量代理模型。這種方法思路直接、流程簡(jiǎn)單,在工程上廣為應(yīng)用,但往往需要在整個(gè)設(shè)計(jì)域內(nèi)大量采樣以增加其在真實(shí)解鄰域內(nèi)出現(xiàn)的概率從而滿足精度要求,難以平衡優(yōu)化精度與效率。另一種為序列更新代理模型。其利用本次迭代得到的優(yōu)化結(jié)果生成補(bǔ)充樣本點(diǎn),進(jìn)而不斷提高優(yōu)化精度逐步逼近真實(shí)解。由于初始樣本點(diǎn)數(shù)量較少,后續(xù)補(bǔ)點(diǎn)可控,因此該類方法在整體優(yōu)化效率方面較前者更好。盡管該類方法具有廣闊的應(yīng)用前景,但基于其開(kāi)展車身結(jié)構(gòu)多目標(biāo)可靠性優(yōu)化仍然存在一些挑戰(zhàn),比如可靠性約束的處理、優(yōu)化算法的選擇以及補(bǔ)點(diǎn)策略的制定等較難統(tǒng)籌,因而在不損失優(yōu)化精度的基礎(chǔ)上保證整體優(yōu)化效率存在困難。
鑒于此,本文集成概率充分因子法、自適應(yīng)加權(quán)多目標(biāo)優(yōu)化算法、徑向基函數(shù)代理模型以及自適應(yīng)補(bǔ)點(diǎn)方法,構(gòu)建基于序列更新代理模型技術(shù)的車身結(jié)構(gòu)多目標(biāo)可靠性優(yōu)化平臺(tái),并對(duì)其進(jìn)行測(cè)試和應(yīng)用。
2 多目標(biāo)可靠性優(yōu)化平臺(tái)
多目標(biāo)可靠性優(yōu)化的數(shù)學(xué)表達(dá)式為:
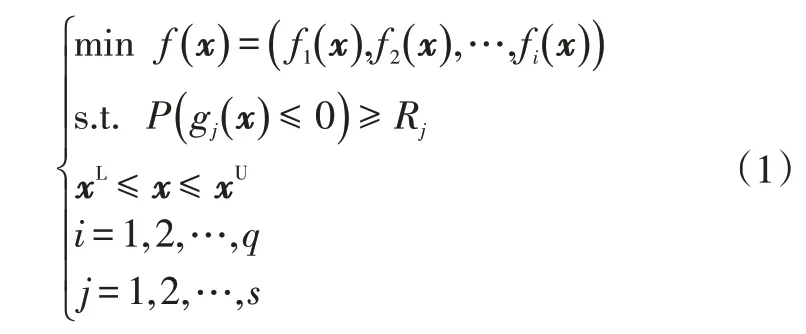
式中,fi(x)、gj(x)分別為第i個(gè)設(shè)計(jì)目標(biāo)和第j個(gè)確定性設(shè)計(jì)約束;x為具有一定分布特征的設(shè)計(jì)變量向量;xL、xU分別為x的下限和上限;P()為以Rj為目標(biāo)可靠度的概率約束;q為設(shè)計(jì)目標(biāo)總數(shù);s為約束總數(shù)。
通過(guò)適當(dāng)?shù)母怕始s束處理,將可靠性優(yōu)化問(wèn)題轉(zhuǎn)化為確定性優(yōu)化問(wèn)題,利用代理模型代替耗時(shí)的仿真模型并持續(xù)更新模型提升精度,采用高效多目標(biāo)優(yōu)化求解器,即可求解得到高精度近似POF。建立的多目標(biāo)可靠性優(yōu)化平臺(tái)計(jì)算流程如圖1所示。
2.1 徑向基函數(shù)代理模型
由于對(duì)非線性物理模型具有良好的描述能力,同時(shí)對(duì)離散多變量數(shù)據(jù)進(jìn)行插值的能力較強(qiáng),徑向基函數(shù)(Radial Basis Function,RBF)模型在工程界與學(xué)術(shù)界都受到了高度重視。通常,RBF模型分為數(shù)量為m的徑向基函數(shù)和數(shù)量為n的帶加權(quán)系數(shù)的多項(xiàng)式項(xiàng),其數(shù)學(xué)表達(dá)式為:

式中,‖x-μi‖為設(shè)計(jì)點(diǎn)x與觀測(cè)輸入μi之間的歐幾里德距離;φ為徑向基函數(shù);λi為未知權(quán)重因子;φj(x)為多項(xiàng)式項(xiàng);Cj為系數(shù)。
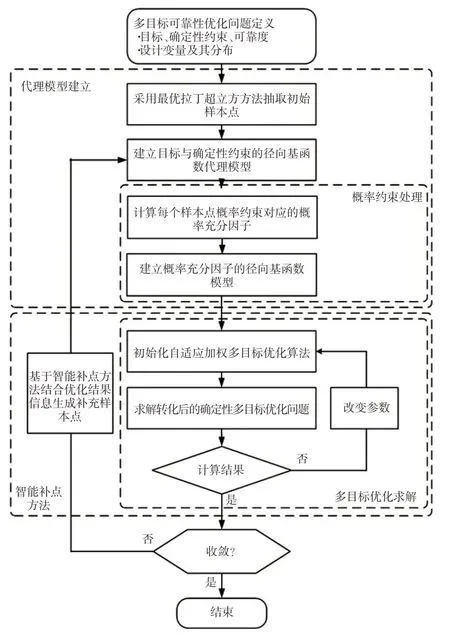
圖1 多目標(biāo)可靠性優(yōu)化平臺(tái)計(jì)算流程
2.2 概率充分因子法
通過(guò)將安全因子與蒙特卡洛仿真得到的失效概率相結(jié)合,概率充分因子(Probabilistic Sufficiency Factor,PSF)法可以在僅增加一小部分計(jì)算量的條件下足夠精確地處理可靠性優(yōu)化問(wèn)題[8-10]。基于概率充分因子法,式(1)中相應(yīng)的概率約束可替換為:

式中,s(x)為由確定性約束的上界或下界與其在優(yōu)化過(guò)程中計(jì)算的實(shí)際響應(yīng)之比決定的安全系數(shù);R為Rj的集合。
概率充分因子V是可靠性水平大于或等于R的安全系數(shù),因此,式(3)可以進(jìn)一步改寫(xiě)為:

在蒙特卡洛仿真基礎(chǔ)上,V可由式(5)計(jì)算得出:
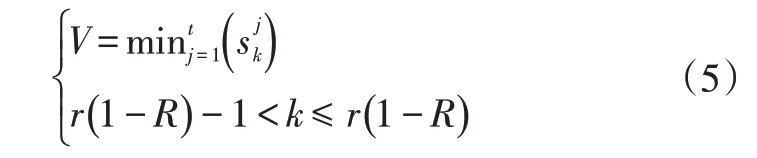
當(dāng)V≥1 時(shí),可靠性水平等于或高于目標(biāo)值,因此設(shè)計(jì)方案滿足規(guī)定的安全要求;當(dāng)V<1 時(shí),設(shè)計(jì)方案不滿足安全要求。此外,在優(yōu)化過(guò)程中,V可以用代理模型估算。
2.3 自適應(yīng)加權(quán)多目標(biāo)優(yōu)化算法
為了克服進(jìn)化類算法計(jì)算效率低、傳統(tǒng)基于梯度信息的加權(quán)算法在非凸區(qū)域解分布不均或者無(wú)解的缺點(diǎn),Kim 等人提出了一種自適應(yīng)加權(quán)多目標(biāo)優(yōu)化算法[11-12]。其基本思想是在傳統(tǒng)加權(quán)算法得到初始POF的基礎(chǔ)上,通過(guò)增加額外約束并進(jìn)行子優(yōu)化的方式在分布不均勻的初始POF 上尋找未知區(qū)域的非支配解。優(yōu)化求解流程如圖2所示。
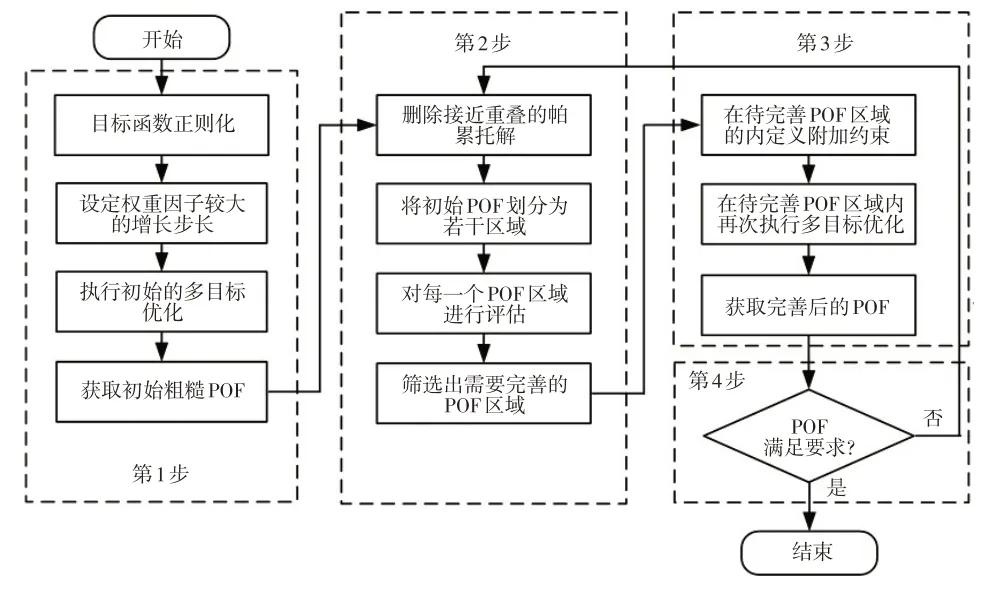
圖2 自適應(yīng)加權(quán)多目標(biāo)優(yōu)化算法流程
2.4 智能補(bǔ)點(diǎn)方法
為了保證最終近似POF的精度,本文引入智能補(bǔ)點(diǎn)方法來(lái)序列更新RBF模型。智能補(bǔ)點(diǎn)方法基于本次優(yōu)化所得POF的極值點(diǎn)、最大、最小距離點(diǎn)以及設(shè)計(jì)域邊界等信息插值生成補(bǔ)充樣本點(diǎn)[13],其詳細(xì)流程如圖3所示。
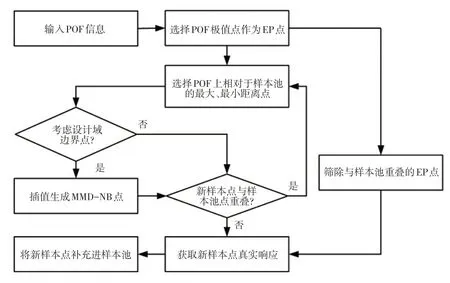
圖3 智能補(bǔ)點(diǎn)方法流程[13]
2.5 收斂準(zhǔn)則
閾值η的默認(rèn)值為20%,當(dāng)優(yōu)化結(jié)果滿足式(6)時(shí)算法收斂:
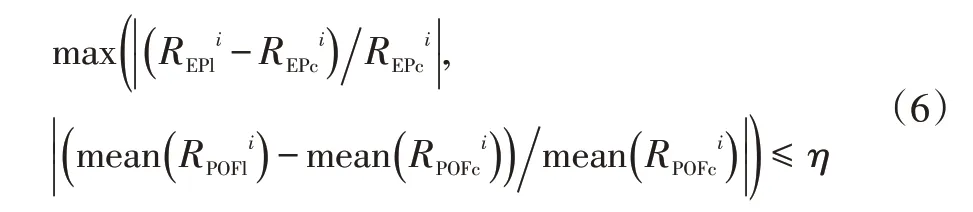
式中,REPli、REPci、RPOFli、RPOFci分別為第i個(gè)設(shè)計(jì)目標(biāo)上次和本次迭代得到的POF 極值點(diǎn)、上次和本次迭代得到的POF點(diǎn)。
3 數(shù)值算例
本文通過(guò)工字梁設(shè)計(jì)算例對(duì)建立的多目標(biāo)可靠性優(yōu)化平臺(tái)性能進(jìn)行驗(yàn)證。如圖4所示,工字梁的設(shè)計(jì)要求為在2 個(gè)給定力的作用下,梁的垂直撓度最小,以梁的截面積和幾何尺寸作為設(shè)計(jì)變量,同時(shí)要滿足應(yīng)力約束。這里設(shè)計(jì)變量均服從正態(tài)分布,作為輸入的不確定性因素。

圖4 工字梁設(shè)計(jì)問(wèn)題
該問(wèn)題的相關(guān)參數(shù)為:梁的容許彎曲應(yīng)力為60 MPa,楊氏模量為0.2 GPa,最大彎曲力F1=600 kN、F2=50 kN,梁的長(zhǎng)度為L(zhǎng)=200 cm。
無(wú)量綱化處理后,該確定性多目標(biāo)優(yōu)化問(wèn)題可以表述為:

式中,F(xiàn)d(x)、Fa(x)分別為該工字梁的垂直撓度和橫截面積;g(x)為梁在上述工況下的應(yīng)力約束;x=[x1,x2,x3,x4]為尺寸設(shè)計(jì)變量,具體見(jiàn)圖4。
將應(yīng)力約束可靠度及設(shè)計(jì)變量變異系數(shù)分別設(shè)為99%和10%,建立與式(7)對(duì)應(yīng)的工字梁多目標(biāo)可靠性優(yōu)化數(shù)學(xué)模型:
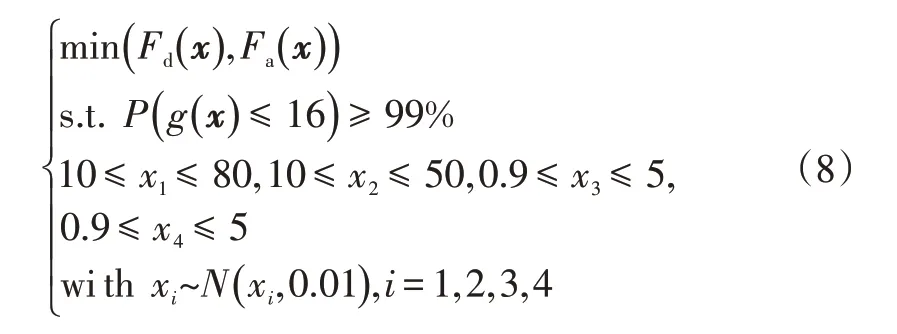
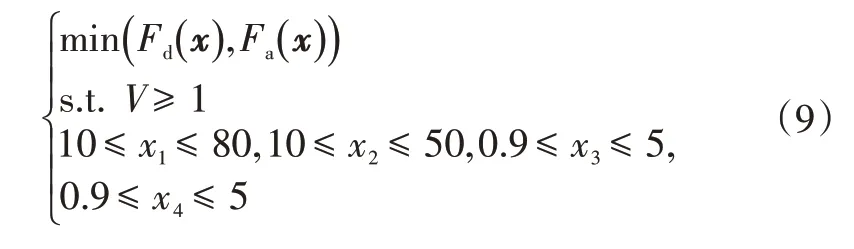
根據(jù)概率充分因子方法,可將該梁設(shè)計(jì)問(wèn)題的多目標(biāo)可靠性優(yōu)化模型進(jìn)一步轉(zhuǎn)化為:
為對(duì)比分析,首先采用最優(yōu)拉丁超立方方法抽取30個(gè)初始樣本點(diǎn),經(jīng)過(guò)5次迭代后,算法收斂,共增加10個(gè)新樣本點(diǎn)。圖5給出了近似POF的逼近過(guò)程,由于最終近似POF 與真實(shí)POF 的一致性良好(除了上端部),該優(yōu)化平臺(tái)的有效性得到了證明。
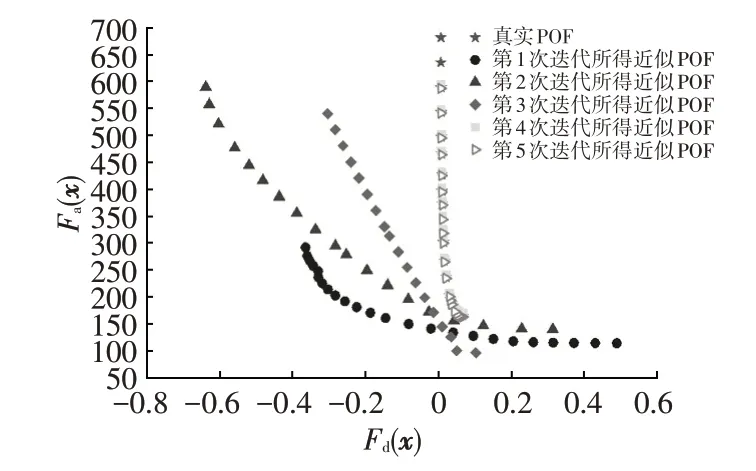
圖5 近似POF的逼近過(guò)程
除提出的優(yōu)化平臺(tái)(方法1)外,為了深入比較研究,采用另外2 種方法求解該設(shè)計(jì)問(wèn)題,包括標(biāo)準(zhǔn)的基于代理模型的PSF方法[14](方法2)和工程中常用的安全系數(shù)法(方法3)。在方法2 和方法3 中,采用最優(yōu)拉丁超立方方法生成50 個(gè)樣本點(diǎn)一步構(gòu)造RBF 模型,選擇多目標(biāo)粒子群算法作為求解器,考慮到算法的精度,將多目標(biāo)粒子群算法中的種群大小和最大迭代次數(shù)均設(shè)置為100。此外,方法3中的安全系數(shù)設(shè)為1.2。
3 種方法的優(yōu)化結(jié)果如表1 所示,與另外2 種方法相比,提出的優(yōu)化平臺(tái)在控制樣本點(diǎn)數(shù)量及提高算法效率方面都具有一定優(yōu)勢(shì)。圖6給出了3種方法所得近似POF 與真實(shí)POF 的對(duì)比結(jié)果。3 種方法所得近似POF的左側(cè)部分與真實(shí)POF高度一致,因此可以滿足可靠度R≥99%的設(shè)計(jì)要求。其右側(cè)部分,盡管方法1 和方法2的Pareto解精度并不十分理想,但與真實(shí)POF的誤差相對(duì)較小。因此,該優(yōu)化平臺(tái)能夠平衡優(yōu)化精度與效率之間的關(guān)系,可以在結(jié)構(gòu)優(yōu)化領(lǐng)域有效應(yīng)用。
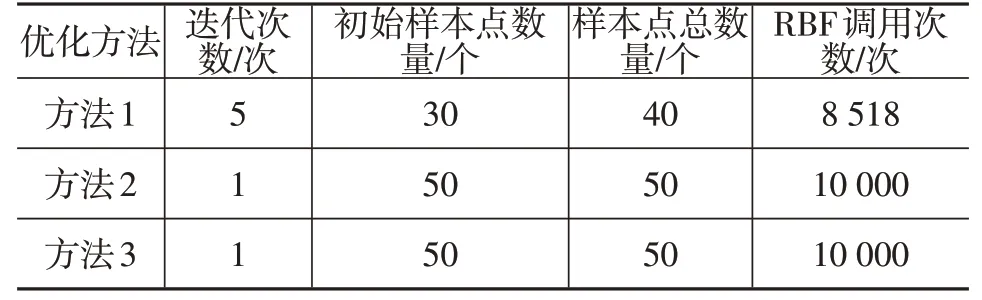
表1 3種方法的優(yōu)化結(jié)果
4 白車身性能仿真分析
4.1 白車身有限元建模
對(duì)某款純電動(dòng)汽車的全承載式白車身進(jìn)行設(shè)計(jì),電池包位于該車身下部。以2D殼單元為主建立白車身有限元模型,如圖7所示。模型中的材料以Q235鋼為主,采用線彈性各向同性材料模型進(jìn)行模態(tài)與剛度分析,采用分段線性塑性材料模型進(jìn)行耐撞性分析。
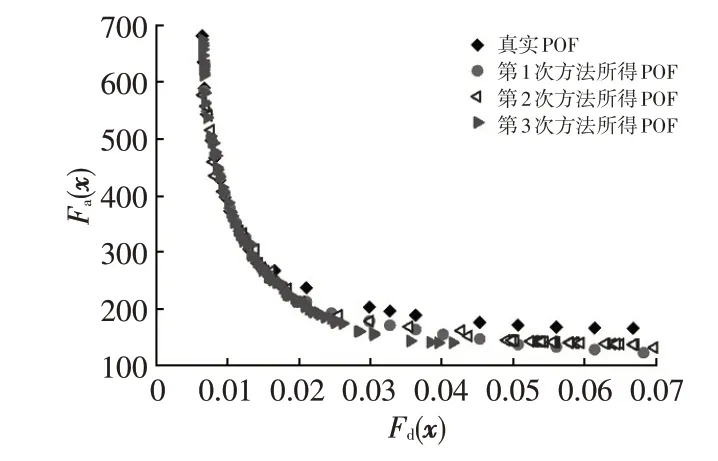
圖6 3種優(yōu)化方法所得POF與真實(shí)POF的對(duì)比
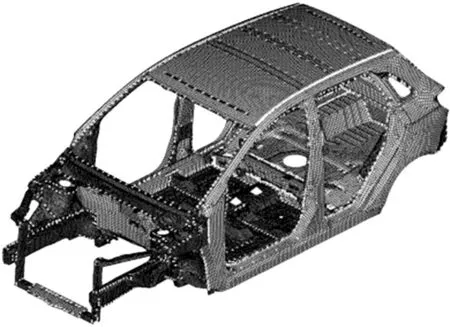
圖7 白車身有限元模型
4.2 模態(tài)分析
基于Lanczos方法,計(jì)算了白車身前6階固有頻率,其值與相應(yīng)的振型如表2 所示。較高的車身基頻(1 階模態(tài)頻率)可以有效降低來(lái)自路面的加速度沖擊,而對(duì)于乘用車,基頻通常需要達(dá)到18~32 Hz 的范圍。初始設(shè)計(jì)的白車身基頻為26.24 Hz,基本滿足要求。
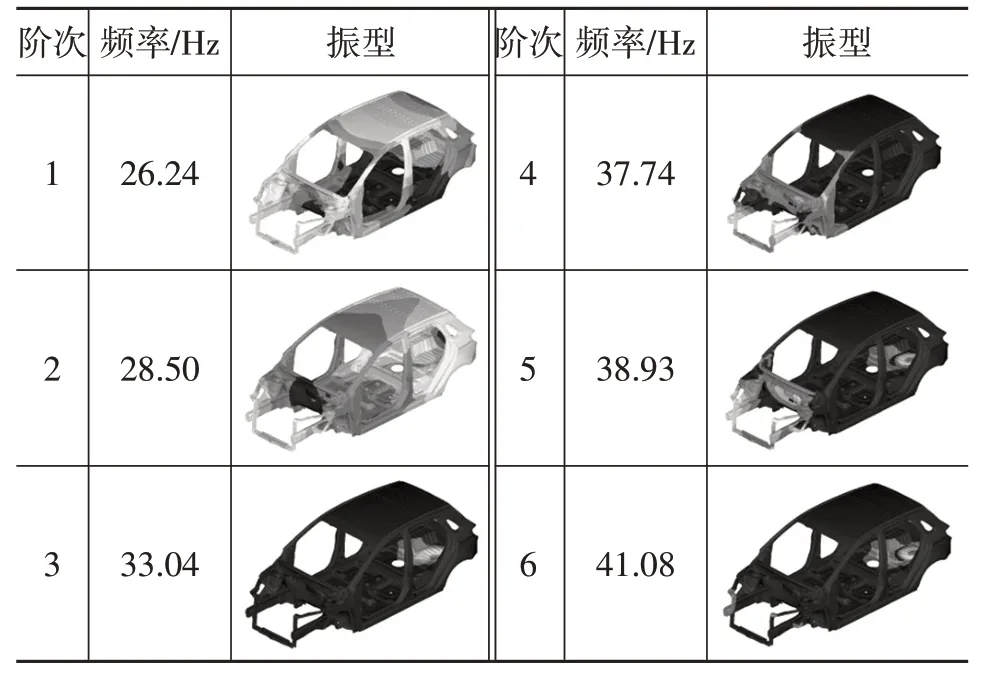
表2 白車身前6階固有頻率及振型
4.3 剛度分析
通過(guò)在白車身有限元模型上施加集中(F1~F4)與均布載荷(P1~P3),并限制前、后4個(gè)懸架連接位置的所有自由度,建立了彎曲剛度分析工況,如圖8所示,表3給出了彎曲工況相關(guān)參數(shù)。
扭轉(zhuǎn)剛度分析工況如圖9 所示,邊界條件定義為:在前軸的懸架減震塔處作用一對(duì)沿Z軸方向相反的力|FT|=5.89 kN,約束前軸中點(diǎn)Y軸和Z軸上的平動(dòng)自由度及旋轉(zhuǎn)自由度,其他邊界條件與彎曲剛度工況一致。
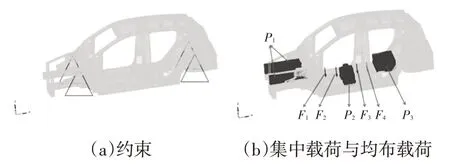
圖8 彎曲剛度工況邊界條件

表3 彎曲剛度載荷
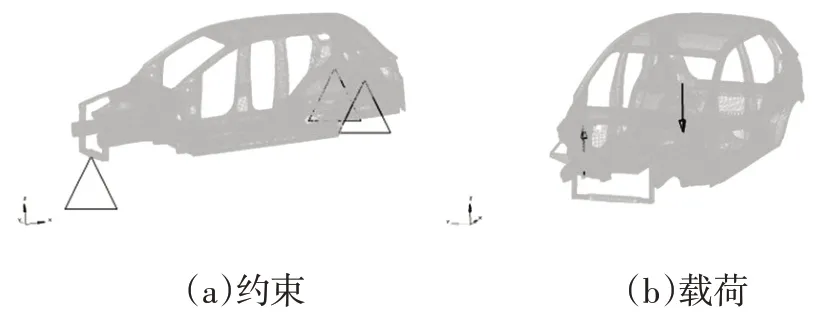
圖9 扭轉(zhuǎn)剛度工況邊界條件
為了計(jì)算白車身的彎曲、扭轉(zhuǎn)剛度,在有限元模型上定義了一系列觀測(cè)點(diǎn),如圖10所示。
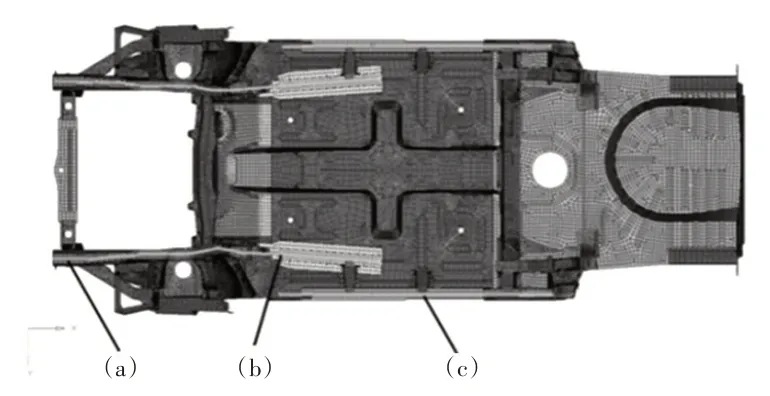
圖10 白車身剛度計(jì)算觀測(cè)點(diǎn)
白車身彎曲剛度KB、扭轉(zhuǎn)剛度KT計(jì)算公式為:
其中,ΣF為表1 中所列載荷總和;δzmax為觀測(cè)點(diǎn)的最大彎曲撓度;T為作用在前軸上的扭矩;θmax、θmin分別為由觀測(cè)點(diǎn)得到的車身最大、最小扭轉(zhuǎn)角。
計(jì)算可得,KB=5 545.8 N/mm,KT=5 021.0 N·m/(°)。
4.4 100%重疊正碰耐撞性分析
由于該工況下白車身變形主要集中在前部,為了提高效率,僅保留前部車身結(jié)構(gòu),在車輛質(zhì)心位置定義質(zhì)量點(diǎn)代替與前端剛性連接的乘員艙及后部模型,簡(jiǎn)化處理后的仿真模型如圖11所示。碰撞初速度設(shè)為50 km/h,碰撞仿真時(shí)間為25 ms。計(jì)算可得總吸能與最大碰撞力分別為15.27 kJ和417.18 kN。
5 前部車身結(jié)構(gòu)多目標(biāo)可靠性優(yōu)化
5.1 優(yōu)化問(wèn)題定義
考慮到對(duì)白車身整體性能的巨大貢獻(xiàn),對(duì)車身前部結(jié)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì)。鑒于電動(dòng)汽車節(jié)能與安全的重要性,以正碰吸能量以及前部車身結(jié)構(gòu)質(zhì)量為設(shè)計(jì)目標(biāo),而最大碰撞力、基頻、彎曲剛度、扭轉(zhuǎn)剛度均不能低于初始設(shè)計(jì)水平。定義5 個(gè)部件厚度作為設(shè)計(jì)變量,如表4所示,考慮部件制造公差為不確定因素,設(shè)計(jì)變量服從正態(tài)分布,變異系數(shù)為10%。
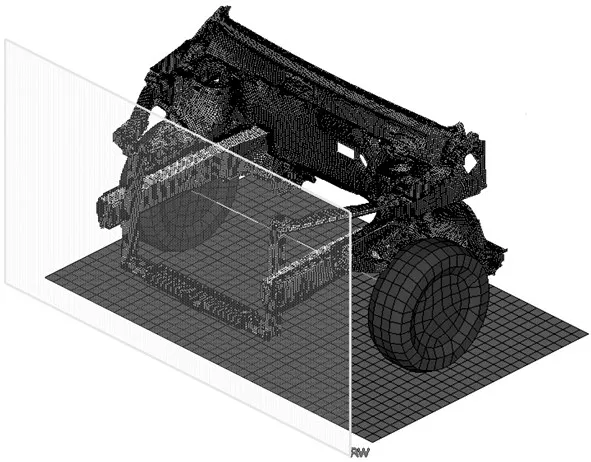
圖11 簡(jiǎn)化后的正碰模型
前部車身結(jié)構(gòu)的確定性多目標(biāo)優(yōu)化數(shù)學(xué)模型為:
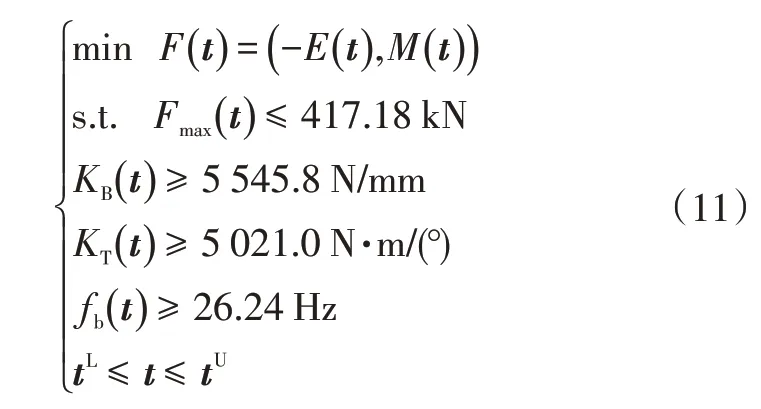
式中,t=[t1,t2,t3,t4,t5]為設(shè)計(jì)變量;tL、tU分別為t的下限和上限;E(t)、M(t)、Fmax(t)、fb(t)、KB(t)及KT(t)分別為吸能量、質(zhì)量、最大碰撞力、基頻、彎曲剛度及扭轉(zhuǎn)剛度。
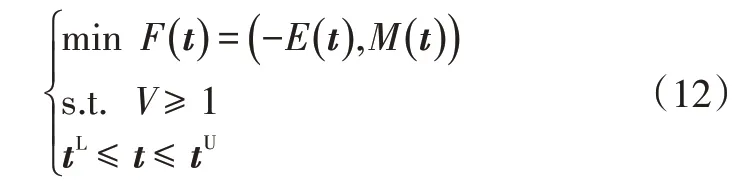
相應(yīng)的多目標(biāo)可靠性優(yōu)化數(shù)學(xué)模型為:
5.2 結(jié)果與分析
基于優(yōu)化平臺(tái),采用最優(yōu)拉丁超立方方法抽取30個(gè)初始樣本點(diǎn),經(jīng)過(guò)4次迭代后優(yōu)化收斂,共生成7個(gè)補(bǔ)充樣本點(diǎn)。最終的近似POF 包含了20 個(gè)備選設(shè)計(jì)方案,如表5所示。從表5中可知,盡管有3個(gè)解沒(méi)能滿足設(shè)計(jì)要求(V≥1),但其值已經(jīng)十分接近1,滿足工程需要。圖12 給出了近似POF 的迭代過(guò)程,可以看出車身前部吸能量與質(zhì)量相互制約,如果傾向于提高吸能量,則最終POF 左上部分的解(表5 中序號(hào)較大者)可作為備選方案,如果傾向于輕量化,則最終POF 右下部分的解(表5 中序號(hào)較小者)可作為備選方案。考慮到前部車身的綜合性能,這里選擇質(zhì)量相對(duì)較輕,力學(xué)性能均優(yōu)于初始設(shè)計(jì)的第18 個(gè)Pareto 解作為最終設(shè)計(jì)方案。如表6所示,由于與對(duì)應(yīng)的有限元仿真結(jié)果相比誤差可被接受,所以優(yōu)化精度滿足要求。
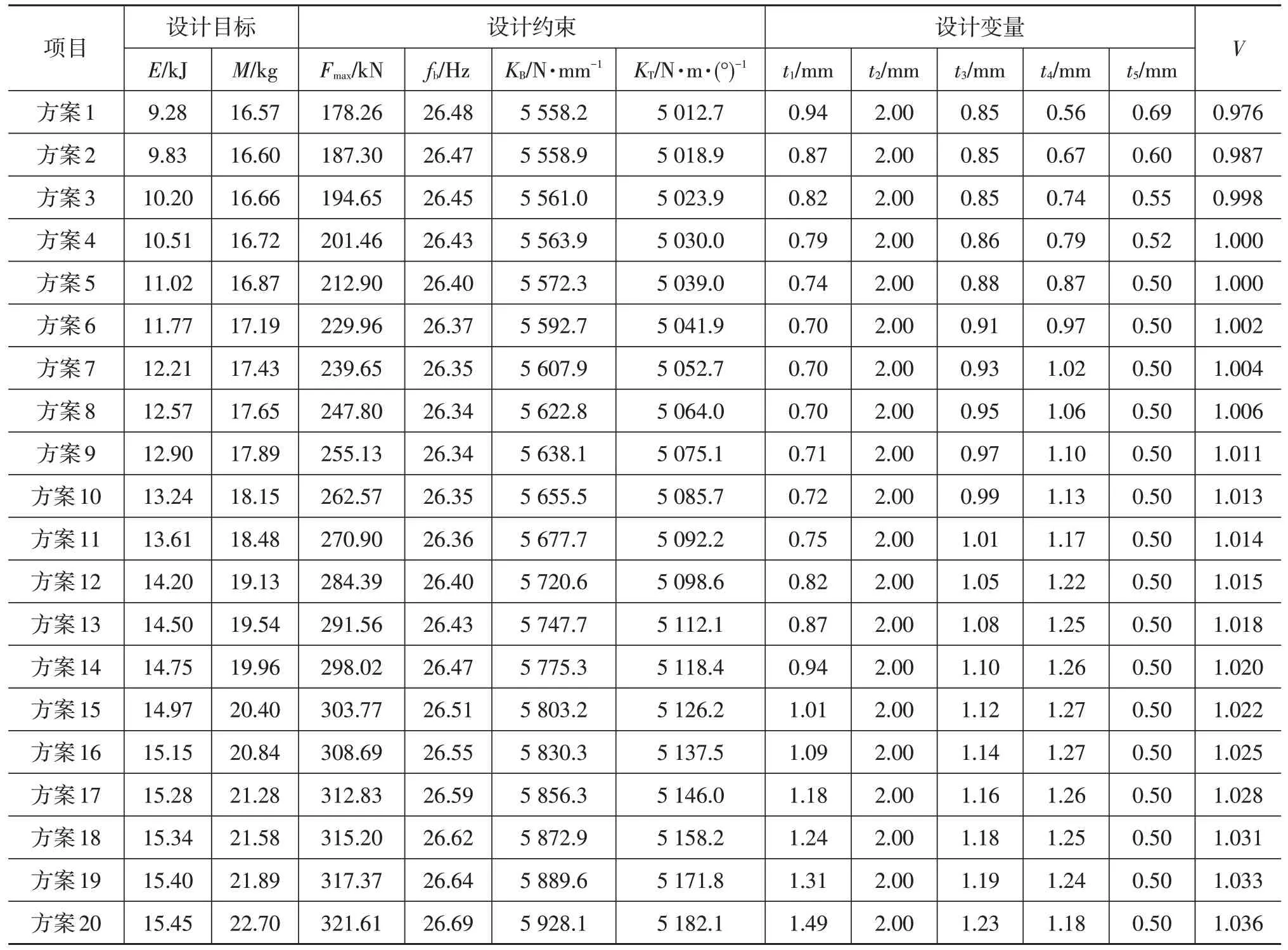
表5 最終近似POF中的備選設(shè)計(jì)方案
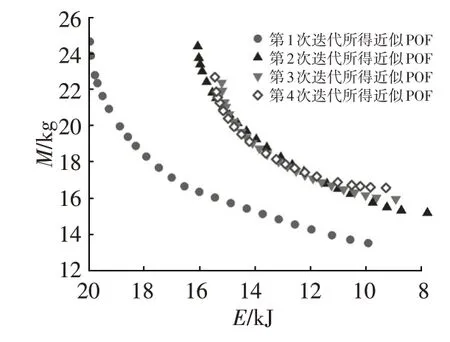
圖12 近似POF迭代過(guò)程

表6 最終近似POF中的備選設(shè)計(jì)方案
6 結(jié)束語(yǔ)
本文基于RBF 代理模型、概率充分因子方法、自適應(yīng)加權(quán)多目標(biāo)優(yōu)化算法及智能補(bǔ)點(diǎn)方法建立了一個(gè)車身結(jié)構(gòu)多目標(biāo)可靠性優(yōu)化平臺(tái)。以工字梁設(shè)計(jì)問(wèn)題為數(shù)值算例,對(duì)優(yōu)化平臺(tái)的實(shí)際應(yīng)用效果進(jìn)行了驗(yàn)證。通過(guò)與一步建立徑向基函數(shù)模型的概率充分因子方法及安全系數(shù)法對(duì)比分析,證明了優(yōu)化平臺(tái)在保證近似POF精度可接受的同時(shí),在樣本量控制和計(jì)算效率方面具有一定優(yōu)勢(shì)。
最后,考慮模態(tài)、彎曲與扭轉(zhuǎn)剛度、正碰耐撞性及輕量化水平等性能,應(yīng)用優(yōu)化平臺(tái)對(duì)某款白車身前部結(jié)構(gòu)開(kāi)展了優(yōu)化設(shè)計(jì)。最終的優(yōu)化方案在保證前部車身結(jié)構(gòu)吸能量提升的同時(shí)降低了質(zhì)量,并滿足可靠度要求。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
