一種三相交錯并聯(lián)Boost變換器內(nèi)模控制策略研究*
2021-02-06 11:34:48林巨廣楊洋陳松波
汽車技術(shù) 2021年2期
林巨廣 楊洋 陳松波
(合肥工業(yè)大學,合肥 230009)
主題詞:Boost變換器 交錯并聯(lián) 內(nèi)模控制 永磁同步電機
1 前言
能量管理作為新能源汽車的核心關(guān)鍵技術(shù)之一,其發(fā)展備受關(guān)注。Boost變換器作為電動汽車能量管理的核心部件之一,可根據(jù)不同工況提供不同的母線電壓,進而提高電驅(qū)動系統(tǒng)效率。文獻[1]、文獻[2]分別研究了兩相和三相交錯并聯(lián)的DC/DC 變換器,通過試驗對比證明了多相并聯(lián)變換器輸出電壓、電流紋波小于傳統(tǒng)單相變換器。文獻[3]采用傳統(tǒng)雙閉環(huán)PI控制器對三相交錯并聯(lián)變換器進行控制,但Boost 變換器在連續(xù)電流模式下會出現(xiàn)右半平面零點的頻域特性,屬于非最小相位系統(tǒng),若控制不當會導致輸出電壓滯后,紋波增大。
為改善傳統(tǒng)PI 控制算法的控制效果,學者們基于PI 控制提出了很多改進算法。文獻[4]、文獻[5]基于單相變換器的小信號模型對直接功率控制和前饋控制進行對比,證實了直接功率控制能夠更好地抑制輸出電壓波動。文獻[6]利用能量平衡原理提出一種新型電路能量圓概念,用來預測負載變化時的電感電流,進而對變換器進行控制。但是上述文獻都沒有較好地解決右半平面零點帶來的動態(tài)性和穩(wěn)定性問題。文獻[7]、文獻[8]針對輸入電壓和輸出負載未知的情況采用滑模控制,但是滑模面的建立非常復雜,參數(shù)調(diào)節(jié)困難。文獻[9]、文獻[10]基于單相Boost 變換器,采用模型預測控制(Model Predictive Control,MPC)算法進行控制,通過試驗證明了MPC適合處理非最小相位系統(tǒng)的動態(tài)特性問題。MPC是一種基于約束優(yōu)化使用內(nèi)部模型進行在線預測的控制器,但設(shè)計過程需要大量離線計算,在實際控制中在線調(diào)試困難,無法保證控制效果。
本文提出一種雙閉環(huán)內(nèi)模控制算法,通過小信號模型,設(shè)計雙閉環(huán)內(nèi)模控制器,在接近非最小相位分量設(shè)定的性能極限下控制非最小相位系統(tǒng),以降低系統(tǒng)在線調(diào)試難度,提高系統(tǒng)穩(wěn)定性。
2 三相交錯并聯(lián)Boost變換器小信號模型建立
2.1 Boost變換器狀態(tài)平均模型
本文所采用的三相交錯并聯(lián)Boost變換器拓撲結(jié)構(gòu)如圖1 所示,該結(jié)構(gòu)不僅可以增加電源的輸出功率,降低變換器的電壓、電流紋波,實現(xiàn)多相冗余備份功能,還可以將其復用為車載充電機[11]。該系統(tǒng)主要用于新能源汽車的電驅(qū)動系統(tǒng),主功率電路由6個絕緣柵雙極型晶體管(Insulated Gate Bipolar Transistor,IGBT)(T1~T6)組成。其中相同相部分IGBT上、下橋臂互補導通,相鄰兩相移相120°導通;C為Boost 變換器輸出電容;V為Boost變換器輸出電壓;Vg為電池端電壓。
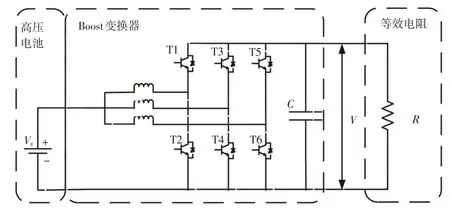
圖1 三相交錯并聯(lián)Boost變換器拓撲結(jié)構(gòu)
考慮到變換器工作時,輸出負載是帶有逆變器的電機負載,變換器與逆變器之間通過直流鏈進行耦合,在穩(wěn)態(tài)工作情況下,變換器只向逆變器傳輸有功功率,在忽略逆變器損耗時,電機需要的輸入有功功率近似等于直流側(cè)輸出的功率。此時可以將變換器的后級逆變器系統(tǒng)等效為電阻負載R[12],其阻值近似為:

式中,P為Boost變換器輸出功率。
定義第n相IGBT導通和關(guān)斷的二值邏輯開關(guān)函數(shù)為:

由基爾霍夫電壓定律建立第n相回路的電壓方程:

式中,L為各相電感;iLn為電感電流。
考慮所有相回路方程之和:

整理得:

根據(jù)基爾霍夫電流定律,建立高壓側(cè)電容正極節(jié)點方程為:

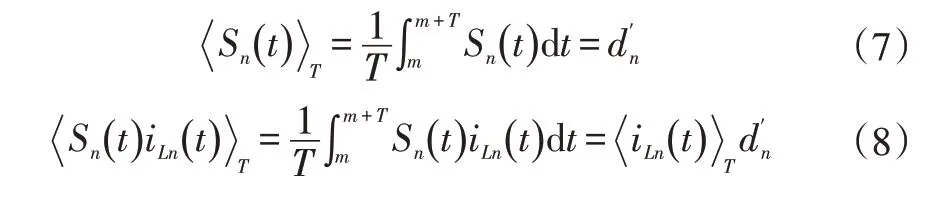
可以看出,只需求得Sn、SniLn的周期平均值,即可實現(xiàn)對式(5)、式(6)的均值化處理。利用狀態(tài)空間平均法[13],可得到第m個周期內(nèi)Sn和SniLn的平均值分別為:
2.2 三相均流Boost變換器的小信號模型
為了使三相并聯(lián)Boost 變換器各相承受的電壓、電流應力狀況一致,即變換器系統(tǒng)輸出的總負載電流必須平均分配到變換器的每一相,本文采用平均電流法進行均流控制,相比于主、從均流法,該方法雖然增加了2個電流傳感器,但是實現(xiàn)了多相冗余,提高了變換器的可靠性和總體壽命。
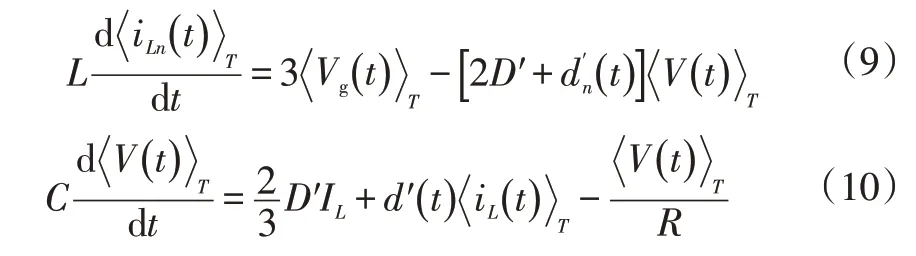
現(xiàn)假設(shè)在變換器穩(wěn)態(tài)運行的某一時刻,第n相(n=1,2,3)電感電流iLn和該相占空比dn出現(xiàn)擾動,而其余兩相電感電流和占空比仍維持穩(wěn)定值,根據(jù)式(5)和式(6),系統(tǒng)的狀態(tài)方程可以描述為:
引入擾動:
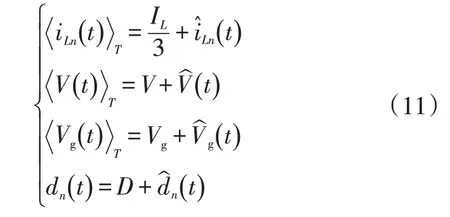
式中,IL、V、Vg、D分別為、dn(t)的穩(wěn)態(tài)值;為各自的擾動值;D′=1-D為該相上橋占空比。
將式(11)分別帶入式(9)和式(10)中,消去直流項和二階交流項并忽略電池電壓擾動,對其進行拉普拉斯變換,得到任意相占空比dn到電感電流iLn的傳遞函數(shù)為:

任意相占空比dn到輸出電壓V的傳遞函數(shù)為:

電感電流iLn到輸出電壓V的傳遞函數(shù)為:

式(12)~式(14)即為本文內(nèi)模控制中的控制對象模型。
3 Boost變換器的內(nèi)模控制器設(shè)計
3.1 內(nèi)模控制
內(nèi)模控制(Internal Model Control,IMC)是一種基于對象模型設(shè)計控制器的方法。作為一種先進的魯棒控制方法,內(nèi)模控制具有設(shè)計簡單、整定參數(shù)少、魯棒性強、控制性能好等優(yōu)點[14]。
圖2 所示為內(nèi)模控制結(jié)構(gòu),其中r(s)為系統(tǒng)輸入信號,N(s)為外界擾動,y(s)為系統(tǒng)輸出信號,G(s)為被控對象,Gm(s)為被控對象的模型,不受外界環(huán)境影響,GIMC(s)為內(nèi)模控制器。內(nèi)模控制結(jié)構(gòu)的一個顯著特點就是采用了與被控對象并行的內(nèi)部模型,反饋信息中包含了模型預測與被測信號之間的差異和干擾信號,以及模型失配信息即被控對象與模型之間的誤差,迫使被控對象遵循模型來工作,因此,內(nèi)模控制本質(zhì)上是一種預測結(jié)構(gòu)控制算法。
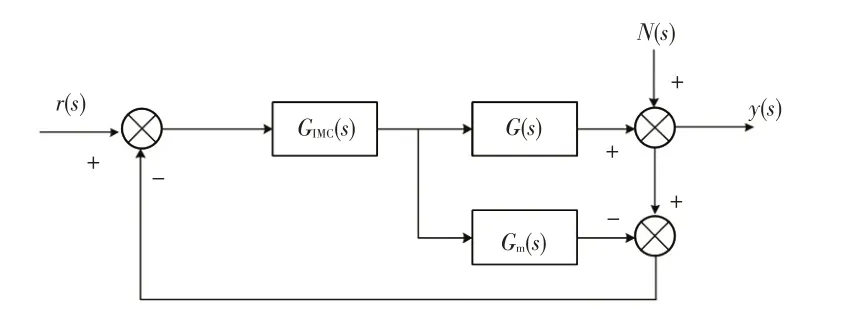
圖2 內(nèi)模控制結(jié)構(gòu)
為了保證三相交錯并聯(lián)Boost變換器內(nèi)模控制的快速性和魯棒性,本文采用如圖3所示的雙閉環(huán)內(nèi)模控制模型,其中內(nèi)環(huán)為電流環(huán),外環(huán)為電壓環(huán),Boost 變換器設(shè)計參數(shù)如表1所示。
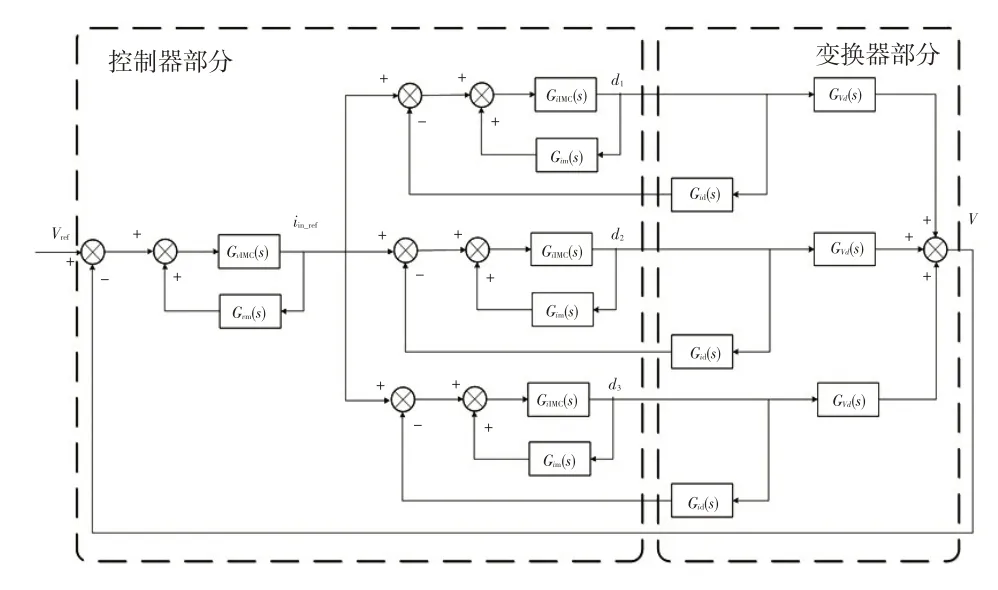
圖3 三相交錯并聯(lián)Boost變換器內(nèi)模控制模型
3.2 電流環(huán)內(nèi)模控制器設(shè)計
由圖2 可知,如果設(shè)計電流環(huán)內(nèi)模控制器GiIMC(s)=1/Gim(s)=1/G(s),則其為輸出可以完全跟蹤輸入的理想控制器。但上文在建立Boost變換器小信號模型時忽略了電感和開關(guān)管內(nèi)阻,所以此時建立的小信號模型并不完全等于被控對象,存在模型失配問題。模型失配可能會導致系統(tǒng)的快速性和魯棒性降低,控制質(zhì)量變差,甚至造成系統(tǒng)失穩(wěn)[15]。因此,需要在電流環(huán)內(nèi)模控制器中引入低通濾波器fi(s)來降低模型失配帶來的影響,引入低通濾波器可以使內(nèi)模控制器具有穩(wěn)定的極點,保證了控制器的穩(wěn)定性并可調(diào)節(jié)系統(tǒng)的穩(wěn)定性和魯棒性。因此有:
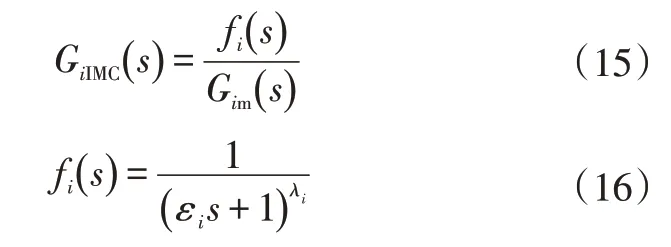
式中,εi為電流環(huán)低通濾波器參數(shù);λi為被控對象模型Gim(s)的相對階數(shù),為保證GiIMC(s)的穩(wěn)定性,取λi=2。

表1 Boost變換器設(shè)計參數(shù)
所以得到:

為了提高控制精度,三相電感電流的采樣頻率設(shè)為30 kHz,根據(jù)香農(nóng)采樣定理[16],要不失真地復現(xiàn)模擬信號,采樣頻率不能小于模擬信號頻譜中最高頻率的2倍,所以設(shè)計電流環(huán)的帶寬在10 kHz 左右。利用MATLAB中的Simulink工具搭建如圖4所示的電流環(huán)結(jié)構(gòu)模型,調(diào)節(jié)內(nèi)模控制器中唯一可調(diào)參數(shù)εi。最終得到εi=1.19×10-5,幅值裕度為∞,相位裕度為76.3°,帶寬為10.8 kHz,保證了電流環(huán)的穩(wěn)定性、快速性和抗干擾能力。電流環(huán)開環(huán)Bode圖如圖5所示。
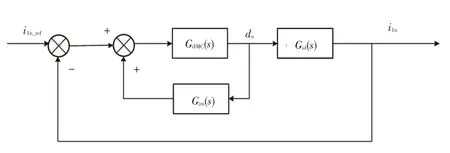
圖4 電流環(huán)結(jié)構(gòu)
3.3 電壓環(huán)內(nèi)模控制器設(shè)計
在電壓環(huán)內(nèi)模控制器設(shè)計中,由于被控對象模型Gvm(s)包含右半平面零點,是一個非最小相位系統(tǒng),如果將電壓環(huán)內(nèi)模控制器簡單設(shè)計成GvIMC(s)=1/Gvm(s)=1/G(s),會產(chǎn)生一個物理上不可實現(xiàn)的控制器。因此需要將被控對象模型Gvm(s)進行分解:

其中Gvm+(s)包含了對象模型的右半平面零點,且有Gvm+(0)=1,Gvm-(s)為對象模型的最小相位部分,這樣分解可以將非最小相位的影響最小化。即:

圖5 參數(shù)整定后電流環(huán)Bode圖
此時電壓環(huán)內(nèi)模控制器可設(shè)計為GvIMC(s)=1/Gvm-(s),由于上文提到存在模型失配問題,因此,電壓環(huán)內(nèi)模控制器也需要引入低通濾波器fv(s)來降低模型失配的影響,低通濾波器還能配置電壓環(huán)內(nèi)模控制器的極點,使之物理上可實現(xiàn),保證了控制器的穩(wěn)定性并能調(diào)節(jié)系統(tǒng)的穩(wěn)定性和魯棒性。即:

式中,εv為電壓環(huán)濾波器參數(shù),是電壓環(huán)內(nèi)模控制中唯一可調(diào)參數(shù),決定了系統(tǒng)的響應速度;λv為被控對象模型Gvm(s)的相對階數(shù),為保證GvIMC(s)的穩(wěn)定性,取λv=2。
因此得到:

因為電壓環(huán)中存在非最小相位部分,右半平面零點會降低系統(tǒng)的穩(wěn)定性[17-18],所以電壓環(huán)的帶寬需小于右半平面零點的轉(zhuǎn)折頻率。根據(jù)式(13)可得Boost變換器電壓環(huán)右半平面零點的轉(zhuǎn)折頻率ω0為:

電壓環(huán)內(nèi)模控制器參數(shù)εv近似地與電壓環(huán)閉環(huán)帶寬成反比,εv的值越小,帶寬越寬,響應速度越快,但魯棒性變差,反之,快速性降低但魯棒性變強。為了避開非最小相位特性對系統(tǒng)穩(wěn)定性的影響并且保證電壓環(huán)的快速性,利用MATLAB 中的Simulink 搭建如圖6所示的電壓環(huán)結(jié)構(gòu)模型,對電壓環(huán)內(nèi)模參數(shù)εv進行調(diào)節(jié)。最終得到εv=2.11×10-3,幅值裕度為13.1 dB,相位裕度為49.9°,帶寬為182 Hz,幅值裕度和相位裕度都為正且閉環(huán)帶寬遠低于右半平面轉(zhuǎn)折頻率,電壓環(huán)具有較好的穩(wěn)定性和抗干擾能力。電壓環(huán)開環(huán)Bode圖如圖7所示。
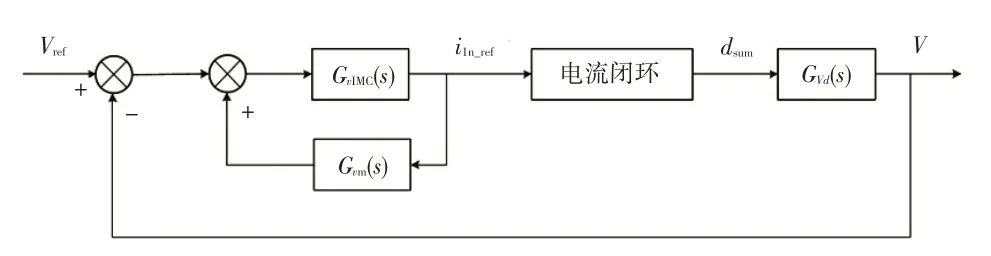
圖6 電壓環(huán)結(jié)構(gòu)
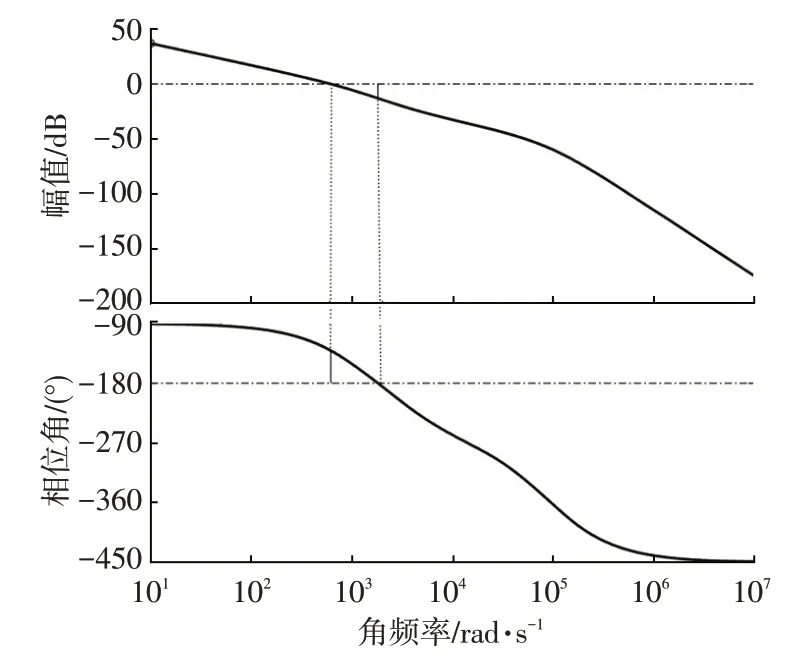
圖7 參數(shù)整定后電壓環(huán)Bode圖
4 仿真與試驗
4.1 三相交錯并聯(lián)Boost變換器內(nèi)模控制仿真
基于Simulink搭建前置三相交錯并聯(lián)Boost變換器的永磁同步電機驅(qū)動系統(tǒng)控制模型,變換器設(shè)計參數(shù)見表1,仿真和試驗工況為:Boost 變換器將直流電壓從200 V 升至360 V,使電機在轉(zhuǎn)速為6 000 r/min,輸出功率為60 kW 的工況下持續(xù)運行。分別采用文獻[3]中傳統(tǒng)PI 控制策略和本文所述的內(nèi)模控制策略進行仿真,得到Boost變換器輸出母線電壓的波形如圖8所示。
由圖8 可知,采用傳統(tǒng)PI 控制策略的Boost 變換器輸出電壓波動較大,而內(nèi)模控制的Boost 變換器輸出電壓較為穩(wěn)定。相較于傳統(tǒng)PI 控制策略,本文提出的內(nèi)模控制策略能夠較好地抑制在高電壓、大負載下Boost變換器輸出母線電壓的波動,具有更好的魯棒性。
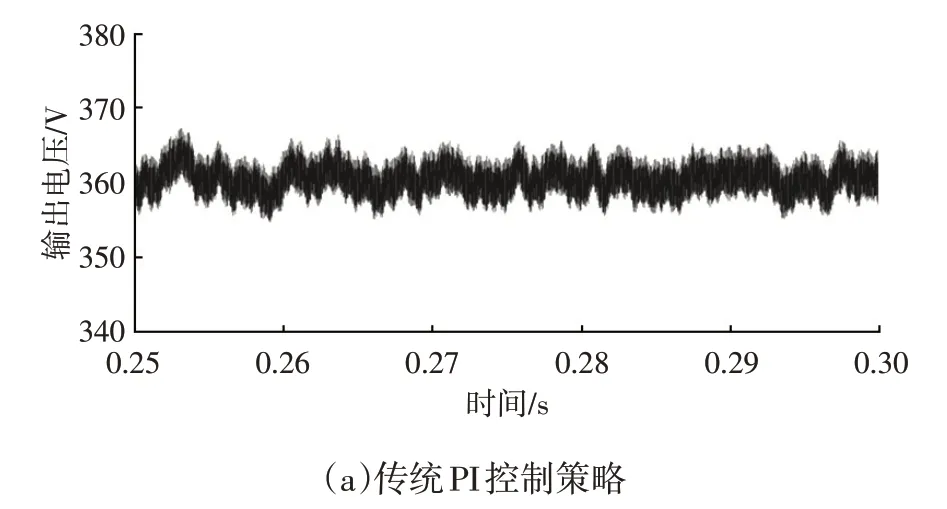
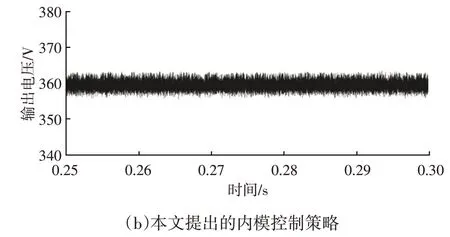
圖8 采用2種控制策略的仿真結(jié)果
4.2 三相交錯并聯(lián)Boost變換器內(nèi)模控制試驗
為了驗證本文提出的控制策略的有效性,在圖9所示的試驗平臺上對本文提出的內(nèi)模控制策略和傳統(tǒng)PI控制策略進行對比試驗,結(jié)果如圖10所示。
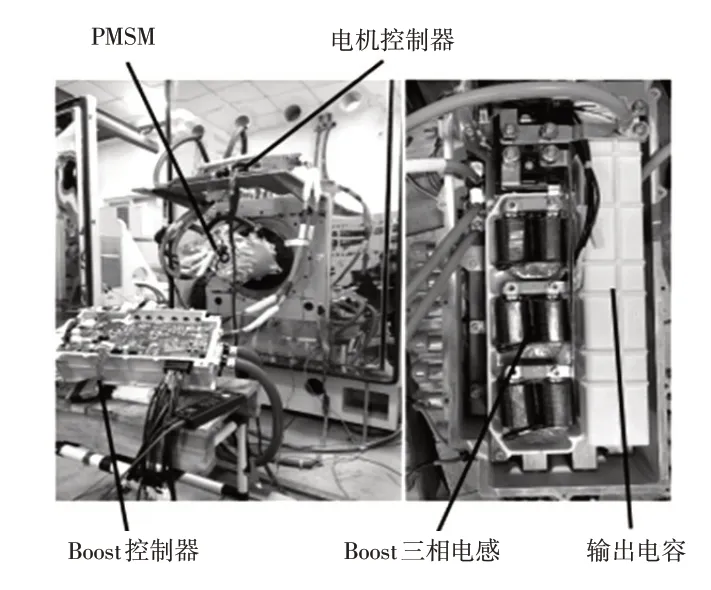
圖9 試驗臺架和Boost控制器
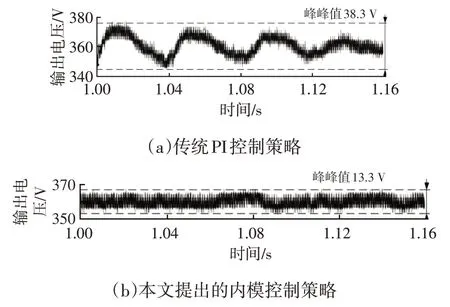
圖10 采用2種控制策略的試驗波形
從試驗波形可看出:采用傳統(tǒng)PI 控制策略的Boost變換器輸出電壓有明顯波動,峰峰值為38.3 V;采用內(nèi)模控制策略的Boost 變換器輸出電壓較為平緩,峰峰值為13.3 V。因此,相較于傳統(tǒng)PI 控制,本文提出的內(nèi)模控制策略能更好地抑制母線電壓波動。
5 結(jié)束語
本文針對三相交錯并聯(lián)Boost 變換器系統(tǒng)存在右半平面零點特性,傳統(tǒng)PI 控制策略下母線電壓存在波動,控制效果較差的問題,提出一種雙閉環(huán)內(nèi)模控制策略。建立三相交錯并聯(lián)Boost 變換器小信號模型,設(shè)計出合理的雙閉環(huán)內(nèi)模控制器。該控制器魯棒性強,控制效果好,且相較于傳統(tǒng)PI控制策略對Boost 變換器難以調(diào)節(jié),控制效果較差的特性,本文提出的內(nèi)模控制策略僅需調(diào)節(jié)2個參數(shù)便可達到期望的快速性和魯棒性,提升了控制效果,降低了在線調(diào)試的難度。仿真和試驗證明了該控制策略在高電壓、大負載的工況下相較于傳統(tǒng)PI控制,能夠更好地抑制母線電壓波動,擁有更強的魯棒性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
核科學與工程(2015年4期)2015-09-26 11:59:03
