袋裝水泥自動雙向分流轉向溜槽設計與仿真分析
2021-02-04 08:09:50王觀民張宏洲周曉光朱萌程明峰
水泥技術 2021年1期
王觀民,張宏洲,周曉光,朱萌,程明峰
1 引言
傳統的袋裝水泥裝車大多采用半自動化方式,依賴人工進行最后的碼垛裝車。這種方式在裝車過程中容易產生大量的粉塵,對工人的身體健康有危害,其工作效率也較低。
目前國際上專業的裝車方式是利用袋裝水泥自動裝車機器人進行裝車,這種方式裝車最快速度可達3 000 包/h[1],按每包水泥重50kg 計,裝車能力為150t/h,工作效率較高。袋裝水泥自動裝車機器人工作中采用兩個抓手交替裝車,需要將主皮帶機輸送過來的袋裝水泥按要求分別分流給兩個抓手。為了滿足此要求,我們配套設計了一種袋裝水泥自動雙向分流轉向溜槽裝置,實現了袋裝水泥裝車全自動化,同時也滿足了3 000包/h水泥的裝車速度。
2 袋裝水泥自動雙向分流轉向溜槽裝置結構設計
袋裝水泥自動雙向分流轉向溜槽裝置的作用主要是完成袋裝水泥的快速分流。在該設備的總體結構設計中,主要是根據水泥生產工況和裝載要求,重點考慮其實用性和可靠性。設備各部分的設計及元器件的選用等都遵循實用性和可靠性原則,確保裝置的正常工作,同時也保證其具有良好的經濟性和可維護性[2]。
袋裝水泥自動雙向分流轉向溜槽裝置的結構設計如圖1所示。該裝置是在線式袋裝水泥自動裝車機器人的起始部件,信號連接于機器人總控制器,與袋裝水泥輸送主皮帶機轉彎溜子的設置相對應。
皮帶機來料接口板與袋裝水泥輸送主皮帶機上轉彎溜子出料端對接設置,固定溜槽向下傾斜設置在皮帶機來料接口板外側,接料隨動滾軸設置在皮帶機來料接口板和固定溜槽連接處。
導向護板包括固定護板和弧形護板,固定護板設置在皮帶機來料接口板一側,弧形護板設置在與固定護板相對一側的固定溜槽側邊上。左轉向溜槽和右轉向溜槽分別傾斜設置在固定溜槽末端左、右兩側,左轉向溜槽和右轉向溜槽中部均設置有凸起的弧形過渡結構。左擺動溜槽和右擺動溜槽均通過中間隨動滾軸分別與左轉向溜槽和右轉向溜槽連接,扭簧分別設置在連接處兩側的下方,在左擺動溜槽和右擺動溜槽旋轉下放中起緩沖作用。出料隨動滾軸分別設置在左擺動溜槽末端和右擺動溜槽末端。
分流擺動機構設置在固定溜槽末端中部,位于左轉向溜槽、右轉向溜槽之間。分流擺動機構包括擺動板、隨動滾圈、輸出軸、固定法蘭、減速器和伺服電機。擺動板前端為自由端,是與固定溜槽傾斜角度相匹配的板件,擺動板位于固定溜槽上方,擺動板后端設置在輸出軸上端。輸出軸垂直設置在固定溜槽末端的中部,隨動滾圈設置在擺動板下側的輸出軸上,固定法蘭、減速器和伺服電機依次連接設置在輸出軸下端。減速器和伺服電機通過輸出軸驅動擺動板左右擺動。
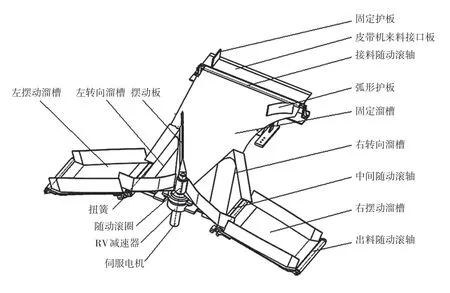
圖1 袋裝水泥自動雙向分流轉向溜槽裝置結構
控制系統包括光電傳感器和控制器。光電傳感器分別設置在固定溜槽前端兩側,檢測袋裝水泥輸送主皮帶機轉彎溜子的來料信號,將來料信號發送至控制器。控制器控制RV減速器和伺服電機驅動擺動板快速左右擺動。
工作過程中,袋裝水泥在輸送主皮帶機上經電動轉彎溜子轉彎后,進入皮帶機來料接口板;光電傳感器檢測袋裝水泥輸送主皮帶機轉彎溜子的來料信號,并將來料信號發送至控制器;控制器根據裝車工藝要求控制RV減速器和伺服電機驅動擺動板快速向左或向右擺動。袋裝水泥在固定護板導向下,沿固定護板靠自身重力下滑并調整方向,弧形護板起到輔助保護作用,然后經過接料隨動滾軸向下溜到固定溜槽,有一定斜度的固定溜槽能使袋裝水泥加速下滑并隨擺動板下側的隨動滾圈進入相應的左轉向溜槽或右轉向溜槽。由于左轉向溜槽和右轉向溜槽中部有凸起的弧形過渡結構,能使袋裝水泥轉彎更加順暢地經過中間隨動滾軸。分流擺動機構見圖2。
左擺動溜槽和右擺動溜槽可以根據在線式袋裝水泥自動裝車機器人的裝車斜輥道高度,圍繞中間隨動滾軸進行一定角度的旋轉擺動,調整袋裝水泥出口的高度位置。扭簧在左擺動溜槽和右擺動溜槽旋轉下放中起緩沖作用。袋裝水泥進入相應的左擺動溜槽或右擺動溜槽后,經出料隨動滾軸,可在出口穩定下滑到指定位置。
3 袋裝水泥運動仿真分析
采用離散元軟件Edem 進行運動仿真分析,如圖3 所示,將袋裝水泥設定成直徑為90mm 小顆粒模型,在袋裝水泥模型內部生成80個目標小顆粒。仿真相關參數如表1。
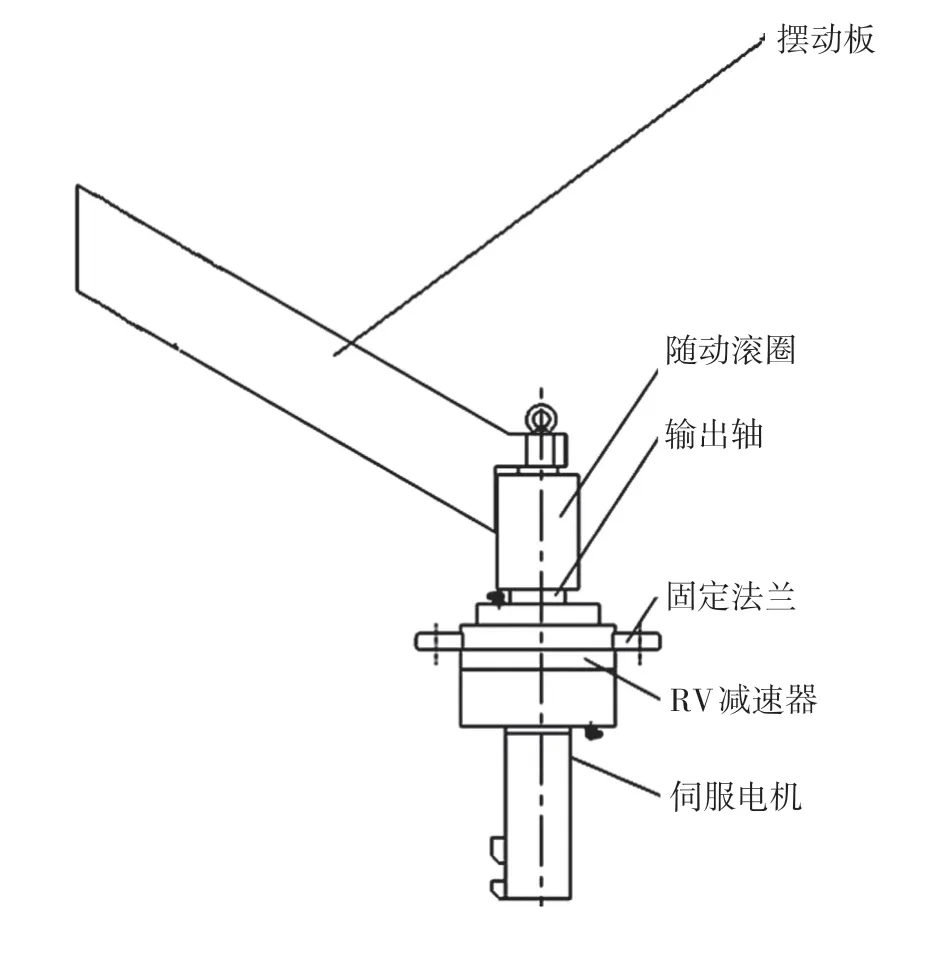
圖2 分流擺動機構
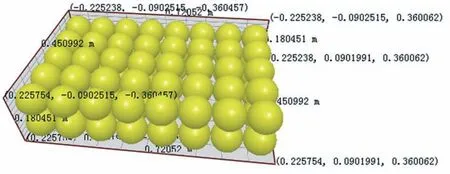
圖3 袋裝水泥粘結顆粒運動仿真分析
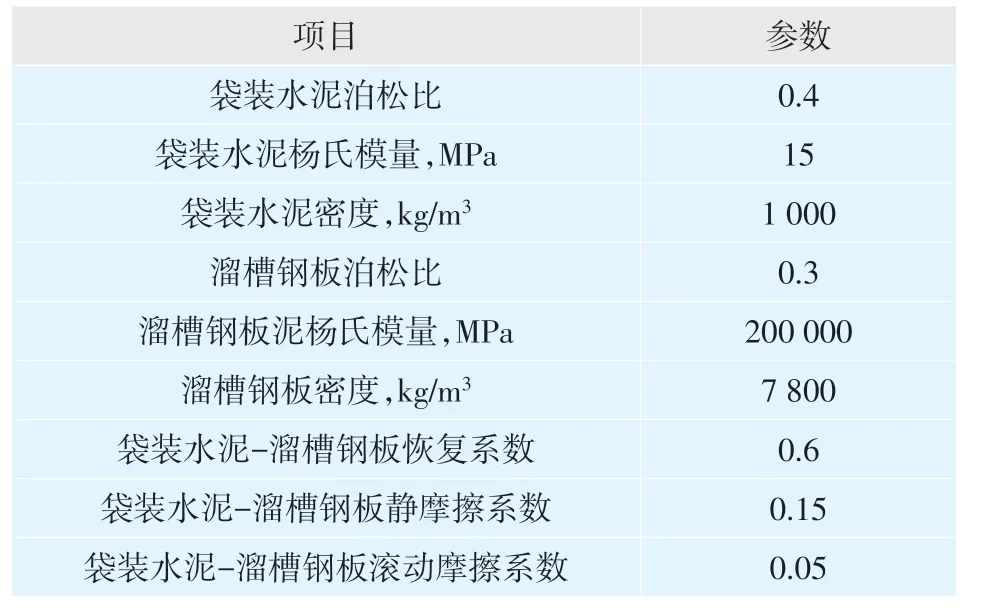
表1 仿真參數設置
袋裝水泥右轉向見圖4,從圖4可以看出,袋裝水泥進入固定溜槽后,由于存在傾斜角度能依靠重力加速下滑,在碰到擺動板開始轉向的同時,前段進入右轉向溜槽,右轉向溜槽中部凸起的弧形過渡結構使得袋裝水泥轉彎更加順暢地經過中間隨動滾軸;袋裝水泥在向下滑落的同時繼續轉向到90°,最后從右擺動溜槽快速滑出。袋裝水泥左轉向示意圖見圖5,由圖5可以看出,擺動板快速擺到另一側后,袋裝水泥向左轉向90°并快速滑出。向左轉向的過程與向右轉向的過程類似,驗證了結構設計的合理性。
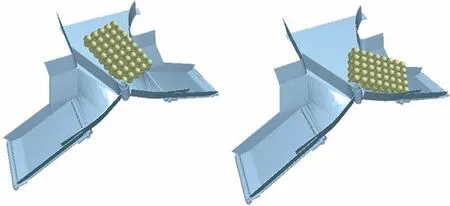
圖4 袋裝水泥右轉向
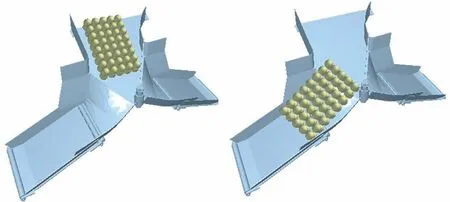
圖5 袋裝水泥左轉向
4 結語
袋裝水泥自動雙向分流轉向溜槽裝置可使左右分流集中于一體,入口前端只需配置一個皮帶式電動轉彎溜子,即可快速將主皮帶機輸送來的袋裝水泥按要求分流給在線式袋裝水泥自動裝車機器人的兩個抓手。采用仿真軟件Edem對袋裝水泥在自動雙向分流轉向溜槽裝置內的運動進行仿真分析,驗證了整體結構設計的合理性。袋裝水泥自動雙向分流轉向溜槽裝置已成功應用于袋裝水泥自動裝車機器人,現場數據顯示,可滿足裝水泥3 000包/h的裝車速度。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
裝備制造技術(2020年9期)2021-01-26 00:15:12
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
同煤科技(2015年2期)2015-02-28 16:59:14
中國艦船研究(2014年5期)2014-05-14 06:43:09
河南科技(2014年23期)2014-02-27 14:18:55
河南科技(2014年6期)2014-02-27 14:06:33
都市快軌交通(2014年4期)2014-02-27 08:35:05
