基于布爾運算的巷道精準建模研究及應用
2021-02-04 06:53:08王紅娟盧新明李金龍張善兵
軟件導刊 2021年1期
關鍵詞:模型
王紅娟,盧新明,李金龍,張善兵
(1.山東科技大學 智能裝備學院;2.山東藍光軟件有限公司,山東 泰安 271000;3.寧夏煤礦設計研究院有限責任公司,寧夏銀川 750021)
0 引言
巷道三維建模是數字礦山和智慧礦山建設的重要組成部分,是實現煤炭精準開采的基礎和保障。根據實測巷道數據建立精準的巷道三維模型,對于井巷工程設計、井下安全生產、災害預警及煤炭精準開采具有十分重要的意義[1-6]。礦山井下巷道錯綜復雜、數據量大,如何快速、自動地建立任意斷面形狀的巷道三維模型是目前研究熱點。
許多學者從不同角度對井巷工程三維建模進行了大量研究,如文獻[7]研究了狹長型海量巷道點云數據精細建模問題,設置不同三角網邊長閾值對點云數據進行分析與處理,實現了對巷道實體對象的全景建模;文獻[8]提出基于近景攝影測量技術的地下巷道三維建模方法;文獻[9]將由結點和中心線表示的巷道骨架模型剖分成簡單巷道體和復雜巷道體,然后對其進行集成構成三維巷道網絡模型;文獻[10]提出基于特征斷面的巷道三維建模思想,并建立巷道三維模型;文獻[11]研究了基于草圖輸入的煤礦巷道模型生成方法;文獻[12]通過巷道底板中線等特征線和斷面參數,采用分段建模算法建立三角形條帶巷道三維模型;文獻[13]采用幾何要素構建三維精細巷道數據庫,從而建立巷道模型;文獻[14]引入參數化建模技術,生成不同類型巷道的三維模型;文獻[15]對礦山井巷工程數據特征進行分析,抽象出井巷工程二三維數據結構及建模方法,根據巷道測量數據建立三維巷道模型;文獻[16]提出一種基于實測數據的巷道系統三維自動建模方法。
從以上分析可知,已有的巷道三維建模研究各有特點,這些研究在巷道交岔點三維建模方面進行了有益探索,但對于復雜巷道中的特殊交岔點處理算法還有待進一步深入研究。要實現巷道自動化建模,首先需要解決包含任意斷面形狀、特殊交岔點的巷道建模問題。本文基于文獻[17]的研究成果,改進并完善了巷道建模算法,研究了基于布爾運算的特殊交岔點建模算法。
1 巷道斷面建模
巷道的斷面形式決定著巷道的空間形態,也是構建三維巷道模型的數據源之一[18-19]。對于不同地質條件下的巷道,其斷面的形狀、寬度、高度不同。最常見的巷道斷面有:半圓拱形、梯形、三心拱形、圓形、切圓形、馬蹄形等。為適應各種類型斷面的自動化建模要求,本文采用六元組表示不同斷面形狀,各斷面六元組參數及其含義描述如下:
1.1 圓拱形斷面
圓拱形斷面參數包括:WL、WR、HL、HR、Fz、Fm,各參數含義為:WL表示左寬,WR表示右寬,HL表示左高,HR表示右高,Fz/Fm表示拱形頂的矢跨比,且1≤Fz≤9,1≤Fm≤9。
當HL=HR,且Fz=1,Fm=2 或Fz=0,Fm=0,生成半圓拱形斷面。半圓拱形斷面示意圖如圖1 所示。

Fig.1 Circular arch section(HL=HR)圖1 圓拱形斷面(HL=HR)
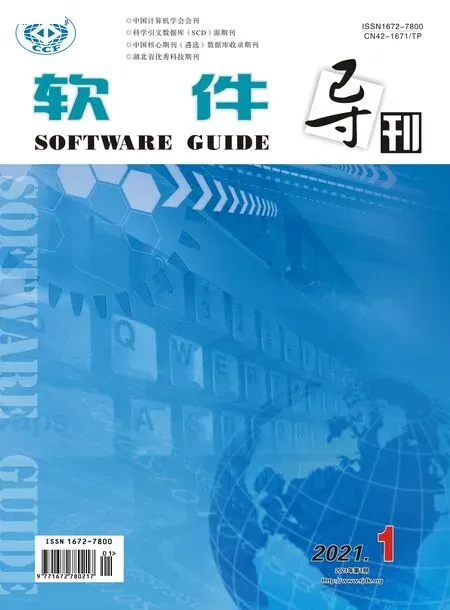
當HL≠HR,Fz=R,Fm=0,生成的圓拱形斷面如圖2 所示。當R>(WL+WR)/2,取min(HL,HR)為墻高。
當HL≠HR,且10<AngleL<90,10<AngleR<90 時,生成切圓頂斷面,墻高為min(HL,HR);當AngleL=90,AngleR=90 時,生成半圓拱形斷面。切圓頂斷面示意圖如圖3 所示。
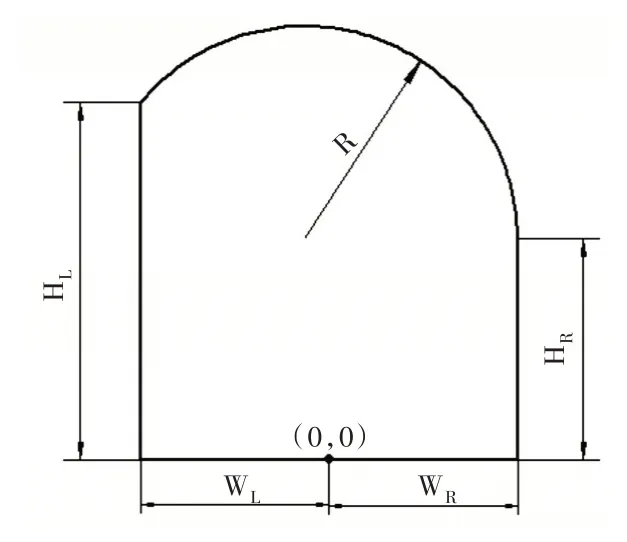
Fig.2 Circular arch section(HL≠HR)圖2 圓拱形斷面(HL≠HR)
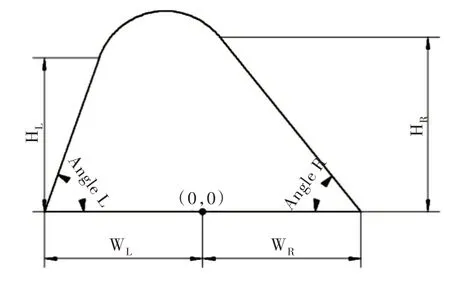
Fig.3 Truncated dome section圖3 切圓頂斷面
1.2 三心拱形斷面
三心拱形斷面參數包括:WL、WR、HL、HR、Fz、Fm,各參數含義為:WL表示左寬,WR表示右寬,HL表示左高,HR表示右高,Fz/Fm表示拱形頂的矢跨比,且1≤Fz≤9,1≤Fm≤9。三心拱形斷面示意圖如圖4 所示。

Fig.4 Triaxial arched section圖4 三心拱形斷面
1.3 梯形斷面
梯形斷面參數包括:WL、WR、HL、HR、AngleL、AngleR,各參數含義為:WL表示左寬,WR表示右寬,HL表示左高,HR表示右高,AngleL 表示左墻傾角,AngleR 表示右墻傾角,當AngleL=90,AngleR=90 時,生成矩形斷面。梯形斷面示意圖如圖5 所示。

Fig.5 Trapezoidal cross-section圖5 梯形斷面
1.4 圓形斷面
圓形斷面參數包括:R、H、HL、HR、Fz、Fm,各參數含義為:R 表示圓形斷面半徑,H 表示高度,HL、HR、Fz、Fm取值為0。當R>H 時,圓形斷面如圖6(a)所示;當R=H,圓形斷面如圖6(b)所示。
Fig.6 Circular cross-section圖6 圓形斷面
1.5 馬蹄形斷面
馬蹄形斷面參數包括:WL、WR、HL、HR、F0、F1,各參數含義為:WL表示左寬,WR表示右寬,HL表示左高,HR表示右高。當F0=0 時,生成低馬蹄形斷面;當F0=1 時,生成高馬蹄形斷面。F1表示側拱的圓心到對邊的距離。低馬蹄形斷面如圖7(a)所示,高馬蹄形斷面如圖7(b)所示。
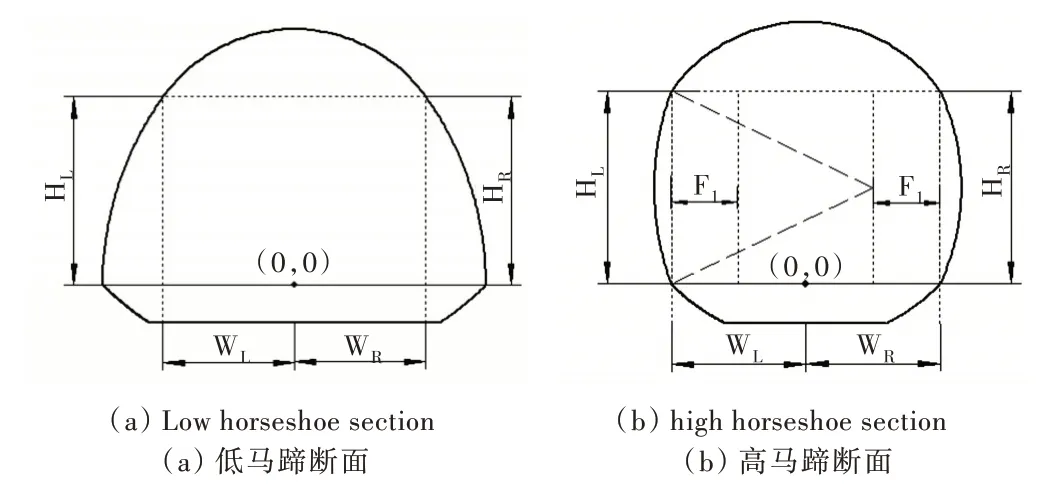
Fig.7 Horseshoe section圖7 馬蹄形斷面
1.6 斷面連接
巷道建模時,根據測量數據為每段巷道的起始點和終點設置斷面屬性,在巷道結點連接處建立相應交岔點,交岔點與對應巷道段連接,可根據實際工程需要分別生成簡易的拆線交岔點和插值處理交岔點模型。如圖8 所示,巷道二叉點由六元組(3,3,3,3,1,2)馬蹄形斷面和六元組(3,3,3,3,0,0)半圓拱形斷面構成,圖8(a)為折線模型,圖8(b)為對交岔點進行光滑處理后的模型。如圖9 所示,巷道二叉點由六元組(3,3,3.5,3.5,70,70)梯形斷面和六元組(3,3,3.5,3.5,70,70)傾斜墻圓拱形斷面構成,圖9(a)為折線模型,圖9(b)為對交岔點進行光滑處理后的模型,巷道的底板、側幫和頂板精度可由參數進行控制(彩圖掃OSID 碼可見)。
2 算法設計
建立精準的巷道三維模型首先要解決各類巷道交岔點的建模問題。對于巷道交岔點建模,文獻[20]利用穿尖交岔點和馬門頭所共有的巷道相交特征建立交岔點模型,通過多段線逼近的方式對曲線巷道的拐彎處進行處理,以保證巷道交岔點處的連通性。在巷道三維建模時,垂直巷道交岔點建模是一個難點,建模時不僅要保持空間的獨立性,還要保持其內部之間的連通性。

Fig.8 Connection between a horseshoe section and a semicircular arch section圖8 馬蹄形斷面與半圓拱形斷面連接
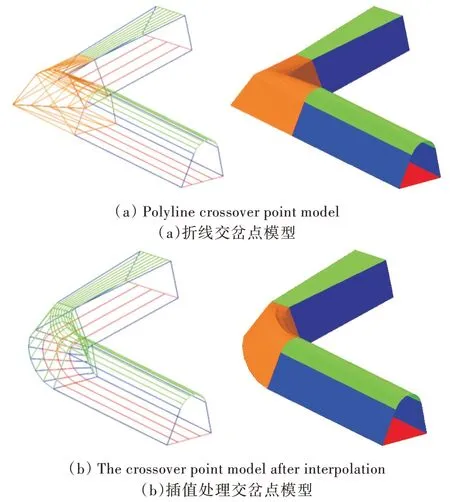
Fig.9 Connection between trapezoidal section and inclined wall arch section圖9 梯形斷面與傾斜墻拱形斷面連接
目前大部分礦業軟件在巷道建模過程中沒有很好地處理垂直交岔點,通常采用圓柱體直接與平巷相連,其內部不連通,因此在巷道內進行碰撞檢測時,不能從某一平巷經過垂直交岔點到達另一平巷,也無法在巷道中進行漫游等操作。由于垂直巷道與其它巷道的頂板、底板或側幫相連接,很難采用傳統的水平巷道交岔點連接方式。為了解決這類巷道的建模問題,實現巷道的自動化精細建模,本文基于實測的巷道測量數據,對垂直巷道建模算法進行改進。在垂直巷道與水平巷道連接時,首先建立垂直巷道和水平巷道的三維模型,然后采用布爾運算算法剪掉重疊的區域,從而實現對垂直巷道交岔點的三維建模。算法步驟描述如下:
Step1:將巷道所有連接關系分類為垂直連接和水平連接,設初始的垂直節點列表和水平節點列表為空。
Step2:計算每段巷道的傾角,若傾角大于α,則該巷道為垂直連接,巷道段始節點和終節點的垂直節點數加1;若傾角小于等于α,則該巷道為水平連接。
Step3:從垂直節點列表中,取一個還未訪問的節點Pi,判斷Pi連接的水平節點和垂直節點個數。
Step4:建立水平巷道模型。若Pi連接的水平節點個數等于0,則節點Pi是井口點,直接與地面相連,轉Step5;若Pi連接的水平節點個數為m,則進行m 交岔點的水平巷道建模,生成巷道三維模型,記為s1.3dt。
Step5:建立垂直巷道模型。若節點Pi連接的垂直節點數為1,設與Pi相連的節點為Pj,則根據節點的斷面形狀及屬性信息,連接節點Pi與節點Pj的斷面,生成垂直巷道模型,記為c1.3d,轉Step7。
Step6:若與節點P1相連的垂直巷道節點數為2,設與Pi相連的節點為Pj和Pk,判斷3 個節點是否共線。若節點Pi、Pj、Pk共線,則直接將節點Pj與節點Pk的斷面相連;若節點Pi、Pj、Pk不共線,則對Pi點的斷面進行旋轉后,分別與節點Pj和節點Pk的斷面相連,生成垂直巷道模型,記為c1.3dt。
Step7:水平巷道模型與垂直巷道的布爾差運算。對水平巷道模型s1.3dt 與垂直巷道c1.3dt 進行差運算,生成節點Pi的垂直交岔點模型。
Step8:如果垂直節點列表不空,則轉Step3,否則算法結束。
3 實驗與應用
3.1 算法實驗
本文以導線控制數據、斷面參數及巷道屬性信息為實驗數據,建立巷道三維模型,導線控制數據坐標如表1 所示。
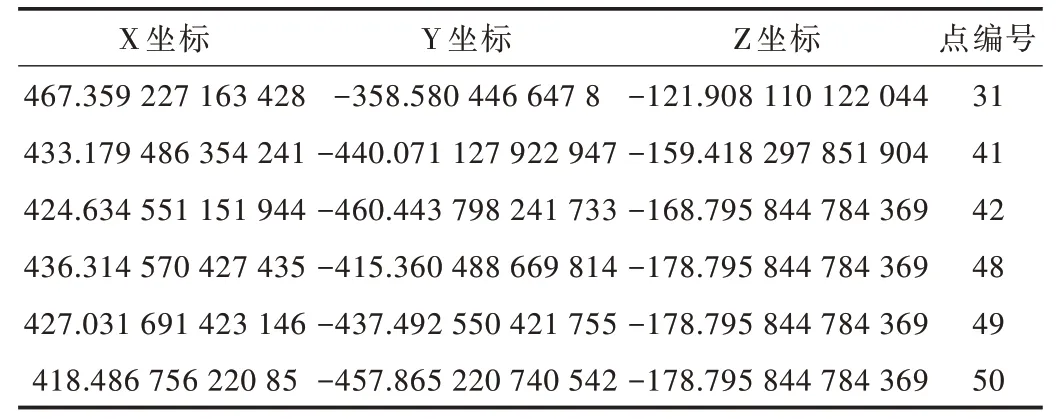
Table 1 Coordinates of traverse control data表1 導線控制數據坐標
巷道建模時在每個節點處將巷道分為直巷和交岔點兩部分,然后對巷道的直巷和交岔點分別建模,直巷的建模效果如圖10(a)所示。該實驗數據有兩個垂直交岔點,按照以上的垂直巷道建模算法步驟,建立垂直節點表中兩個節點的垂直巷道交岔點。建模算法在垂直交岔點處分別生成水平段模型及垂直段模型,如圖10(b)所示,對兩個模型采用布爾運算算法實現垂直交岔點的貫通,如圖10(c)所示。巷道建模時通常采用底板沿著測量導線數據進行拉伸的方式,適用于水平巷道建模。但對于垂直巷道,如果也采用該方式建模,垂直巷道與水平巷道只能部分連接,導致建立的巷道模型無法滿足實際工程要求。為解決以上問題,對于垂直節點列表中的每個節點,在建立節點的垂直巷道模型時需要先把導線調整到巷道中心,然后將對應的巷道斷面連接,實現垂直交岔點的完全貫通,貫通率達到100%。調整后的垂直巷道交岔點三維模型效果如圖10(d)所示(彩圖掃OSID 碼可見)。
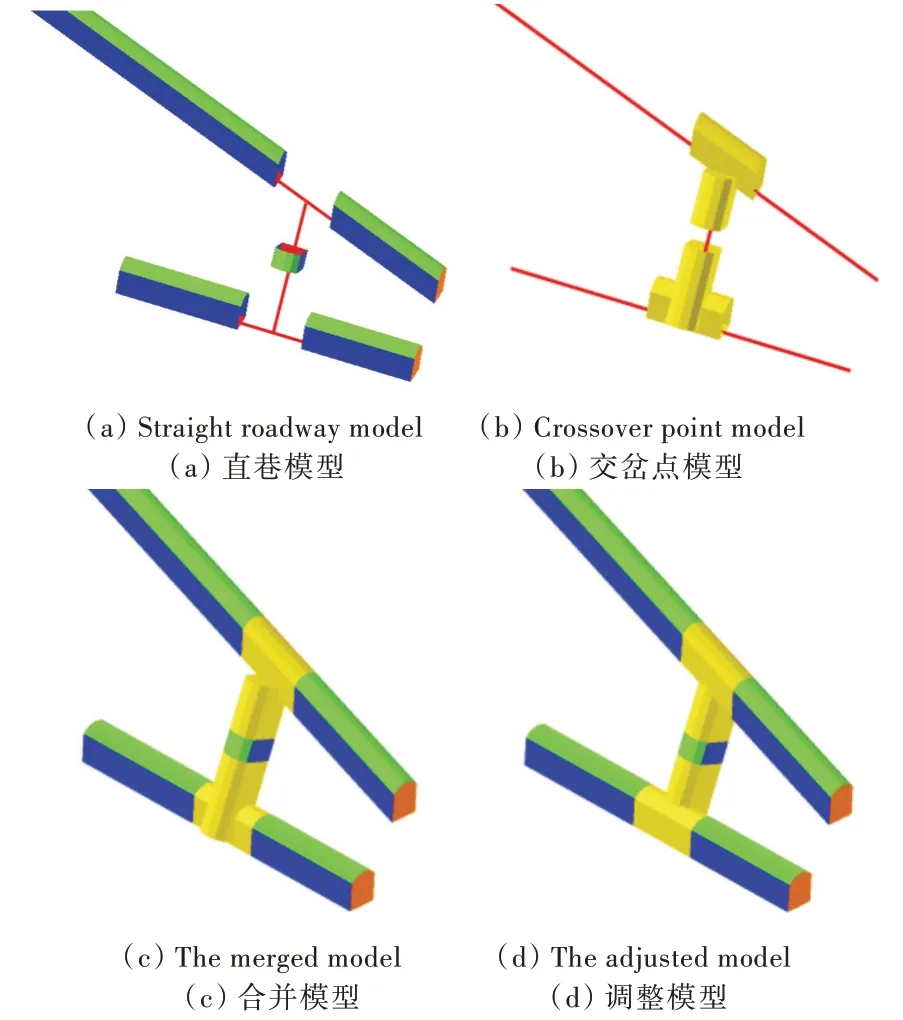
Fig.10 Three-dimensional modeling of vertical roadway intersection points圖10 垂直巷道交岔點三維建模
3.2 應用實例
井巷工程三維建模系統在多個數字礦山建設過程中得到了廣泛應用。以某煤礦煤巷與巖巷的測量導線、剖面圖返填數據及局部調整數據作為建模數據,繪制二維巷道布置圖,如圖11(a)所示。在二維巷道布置圖上配置巷道屬性后進行巷道三維建模,生成的巷道三維模型如圖11(b)所示。
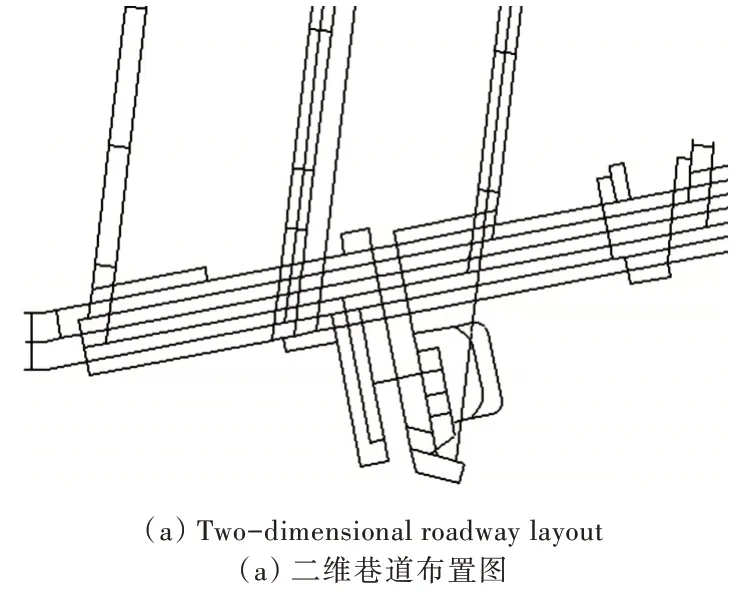
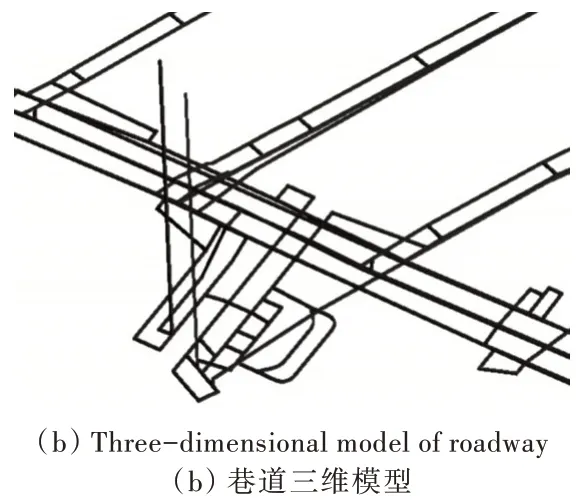
Fig.11 Two-dimensional layout and three-dimensional model of a roadway in a mine圖11 某礦巷道二維布置圖與三維模型
4 結語
井巷工程三維建模是實現煤炭精準開采的基礎與保障,本文研究了巷道精準建模算法,采用六元組表示不同斷面,靈活地控制巷道斷面的底板、頂板及側幫精度,采用布爾運算算法實現巷道垂直交岔點建模,并研制開發了巷道三維建模系統。該系統在付村煤礦、大海則煤礦等多個智慧礦山項目中得到了應用,驗證了本文巷道建模方法的可行性。因此,該巷道精準建模系統在井巷工程設計與生產中具有廣闊的應用前景。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19