一種共形陣星地通信地面接收波束形成器設計
2021-02-03 12:02:20田靖才徐達龍
無線電工程 2021年1期
關鍵詞:信號
田靖才,徐達龍,王 昊
(南京理工大學,江蘇 南京 210094)
0 引言
人造衛星技術是現代科學中應用廣泛的一項技術,在氣象、地球觀測、廣播和通信等領域都發揮著不可替代的作用。隨著衛星技術的高速發展,越來越多的軍用和民用衛星投入使用。衛星工作過程中一個重要環節是與地面通信,星地之間穩定的數據交互是衛星正常工作的前提條件。因此,針對星地通信地面端的研究和工程實踐具有重大意義。
從接收信號的角度,要求星地通信地面站接收覆蓋范圍廣,尤其是方位維要求全覆蓋。衛星在一個龐大的軌道上運行,地面接收站需要能接收來自各個方位的信號。由于軌道高度的變化,要求地面站在俯仰維可以接收較大范圍內的信號。同時,衛星處于一個不斷運動的過程當中,要求地面接收站可以實時獲取衛星當前位置對于地面接收站的指向角度,并及時調整波束指向衛星方向。相比于模擬的相控陣波束,采用更加靈活的數字波束形成(Digital Beam Forming,DBF)技術,更有利于實現這些要求。
近年來針對星地通信系統的研究中,文獻[1]提出了一種基于 FPGA+MPC8260內核的地面站通信機的設計方案,以適應低軌微納衛星信道強烈的多普勒效應及突發遙測的工作模式。文獻[2]提出了基于ZigBee技術的星地通信方案,電路設計簡單,降低了星地通信的硬件成本。
本文設計了一種共形陣的星地通信面接收波束形成器。采用球面陣圓極化天線的形式,在FPGA平臺上完成信號處理。系統可以完成對信號的接收、下變頻和數字波束形成[3-5]等功能。系統內置整套衛星定位和數字波束形成算法,可根據上位機給出的星歷平根數據,自主完成實時計算衛星位置、波束指向角度和權系數。
1 系統概況
系統包括接收天線系統、接收下變頻系統和信號處理系統3部分。接收天線系統采用半球面共形陣[6-7]的陣列形式,由24個陣元組成,每個陣元又分左旋、右旋2個通道,可同時接收48個通道的信號。接收下變頻系統包括本振模塊和下變頻組件,完成接收信號的放大和下變頻功能,將信號頻率由射頻調整至中頻。信號處理系統完成中頻信號的模數轉換,并基于FPGA完成衛星位置指向計算、數字波束形成和數字下變頻等功能,最終輸出波束信號到后端通信模塊進行后續處理。
系統電訊原理[8]如圖1所示。
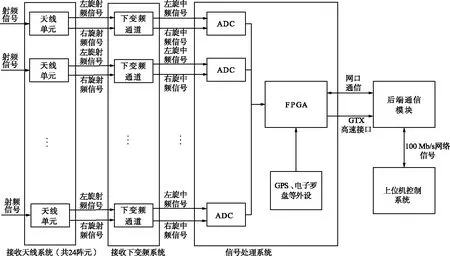
圖1 電訊原理框圖Fig.1 Block diagram of telecommunication principle
系統具有如下特性和創新點:
① 采用半球面的共形陣接收天線陣列以支持數字波束的空間掃描,根據信號入射角度選定參與數字波束形成的陣元,在實現了大接收空間覆蓋范圍的同時,有效地避免了無效陣元參與合成導致的波束信號信噪比惡化。
② 抗干擾能力強。天線單元采用雙饋形式獲得圓極化特性,每個陣元有左旋、右旋2個通道,可以根據發射信號的極化方式,選擇使用左旋通道或右旋通道形成波束,有效地提升抗干擾能力。
③ 支持多對一的實時通信。通過數字波束形成體制,可以同時形成3個指向上的數字波束,以同時追蹤3顆衛星。
④ 內置運算模塊。信號處理流程中包含整套衛星定位和數字波束形成算法,只需操作上位機導入衛星星歷平根數據,系統即可自動完成后續計算流程并輸出波束信號,降低了對使用環境的要求及操作復雜度。
2 天線陣列設計
接收天線采用圓極化方式,共24個陣元,每個陣元又分左旋通道和右旋通道,共48個通道,采用直徑500 mm,高度275 mm的半球陣。天線陣元排布分3層,每層分別由6、8、10個陣元在半球的一個切面圓的圓周上按角度均勻分布組成。
天線陣列俯視圖如圖2所示。
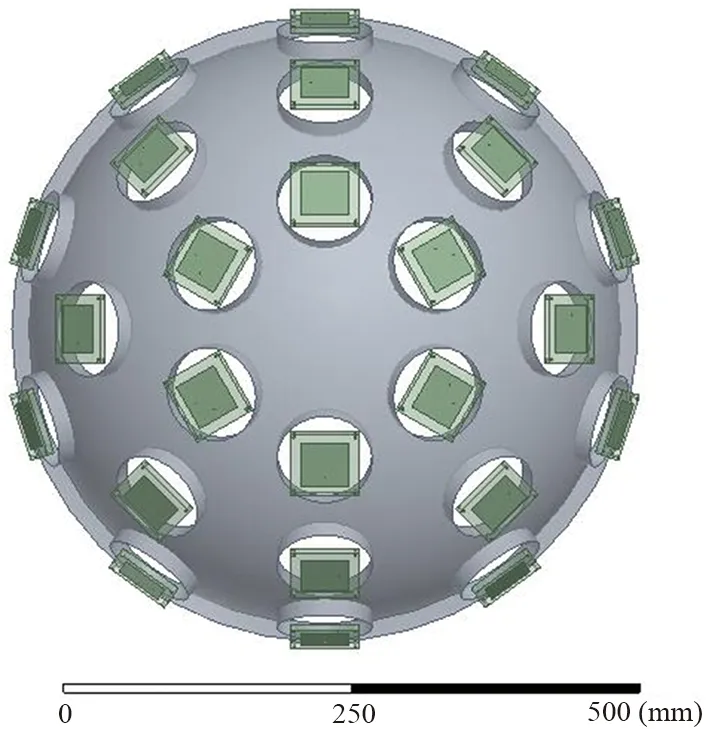
圖2 天線陣列俯視圖Fig.2 Top view of array
俯仰維上,3層天線法向分別朝向俯仰25°、50°、75°,如圖3所示。
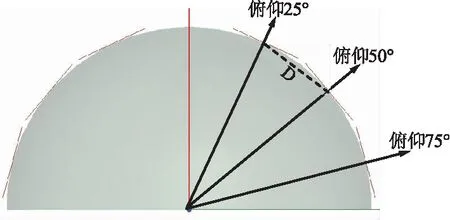
圖3 俯仰排布示意Fig.3 Schematic diagram of elevation distribution
天線陣面的斜側面視圖如圖4所示,同時給出了基于陣元位置定義的陣面坐標系定義方式,以豎直向上為z軸,3個共線陣元所在的直線為x軸。
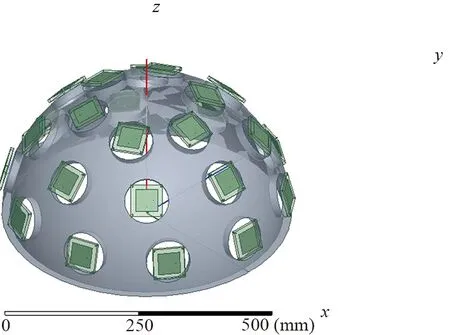
圖4 天線陣列側面視圖Fig.4 Side view of array
此系統中,認為天線陣元的位置矢量與來波方向夾角小于90°(即“面向”來波方向)的陣元接收到的平面波信號強度,會明顯強于位置矢量與來波方向夾角大于90°(即“背對”來波方向)的陣元接收到的信號強度。系統在進行數字波束形成時,只取這些陣元參與數字波束的形成,其他陣元的數字波束形成系數設置為0,即不參與數字波束形成,以避免在合成出的波束信號中引入不必要的噪聲成分[9]。
半球形的陣列設計方式和陣元坐標排布,可以保證在俯仰角0°~75°,方位角任意的情況下,有至少9個陣元的位置矢量與來波方向夾角小于90°(即“面向”來波方向),即對于該范圍內的任意來波方向,有至少9個陣元參與數字波束形成,實現了大接收空間覆蓋范圍的同時提升了波束信號信噪比。
3 數字波束形成算法設計
計算流程分為2部分:① 根據接收站位置信息和星歷數據計算東北天坐標系下的指向角度[10]。結合姿態信息進行坐標系轉換[11],計算接收站坐標系下的指向角度。② 根據接收站坐標系下的指向角度,計算每個陣元的權系數。
3.1 指向角度計算流程
內置波束形成算法的第一步,計算衛星在以接收站為原點的東北天坐標系下的指向角度。根據星歷平根遞推方法得到瞬根,從瞬根中提取當前時刻衛星在J2000坐標系下的位置。通過J2000-WGS84坐標系轉換矩陣,可得到當前時刻衛星在WGS84坐標系下的位置。結合GPS提供的接收站當前時刻的經緯度和高度可計算衛星在以接收站坐標系為原點的東北天坐標系下的坐標,進一步可得到指向角度,包括俯仰角和方位角。
東北天坐標系下衛星位置指向角度計算流程如圖5所示。
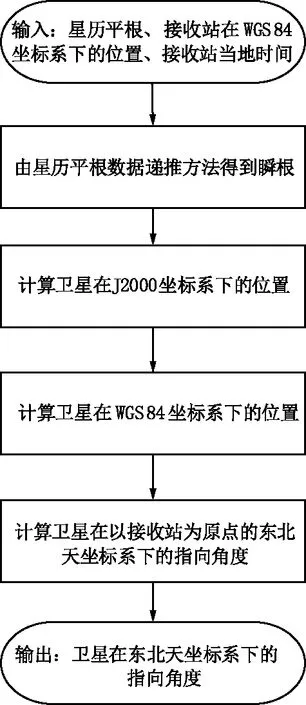
圖5 東北天坐標系下指向角度計算流程Fig.5 Pointing angle calculation process in ENU coordinates
內置波束形成算法的第二步,將東北天坐標系下的指向角根據電子羅盤提供的姿態信息轉換為接收站坐標系下的指向角。首先根據角度,獲得該方向上任一點Q的坐標(xQ,yQ,zQ)。[xQyQzQ]T連續與3個旋轉矩陣相乘,即可得到接收站坐標系下Q的坐標[x’Qy’Qz’Q]T。進一步可轉化為接收站坐標系下衛星方向的指向角度。
坐標系轉換計算流程如圖6所示。
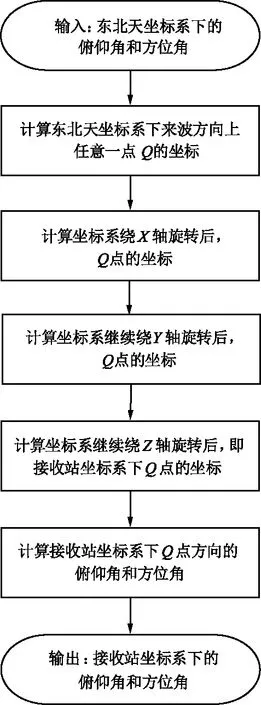
圖6 指向角度的坐標系轉換計算流程Fig.6 Coordinate system conversion calculation lowchart of pointing angle
3.2 陣元權系數計算數學模型
陣元權系數包括2部分:位置補償[12]和極化補償[13]。其中位置補償可以通過得到的指向角結合陣元坐標計算;極化補償是固定的數值,不隨波束指向而變化。
① 陣元位置差異導致的相位差(位置補償)
參考點、來波方向、陣元位置之間的關系,即波程差計算示意如圖7所示。
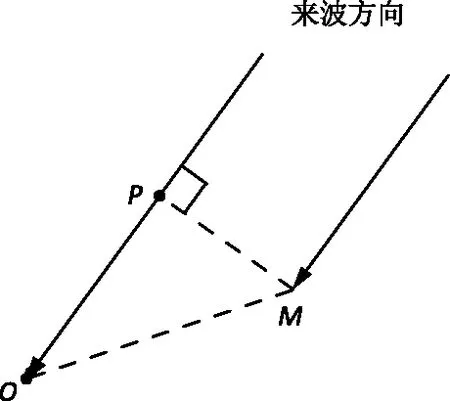
圖7 波程差計算示意Fig.7 Schematic diagram of wave path difference calculation
以原點O為參考點,陣元位置為空間中的一點M(xm,ym,,zm),來波方向俯仰角為θ,方位角為φ,接收到的信號為來波方向上的平面波。對于空間中的任意一點M,來波方向OP與線段OM必然共面,且來波方向上的信號到達M點與O點之間的波程差S為線段OP的長度,等于向量MO與向量PO方向上單位向量的點積:
(1)

sinφ+ksinθ。
有:
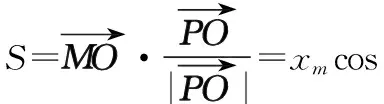
(2)
信號到達M點與到達參考點O之間需要補償的相位差:
(xmcosθcosφ+ymcosθsinφ+zmsinθ)。
(3)
根據上式,帶入陣元坐標,可計算出所有陣元的位置補償值。
② 圓極化方式導致的相位差(極化補償)
天線的圓極化方式也會導致通道間的接收信號的相位差,需要進行補償。極化方式導致的相位差是固定的,與來波方向無關,只與陣列結構有關。
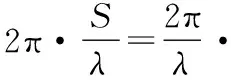
天線陣列排布俯視圖如圖8所示。
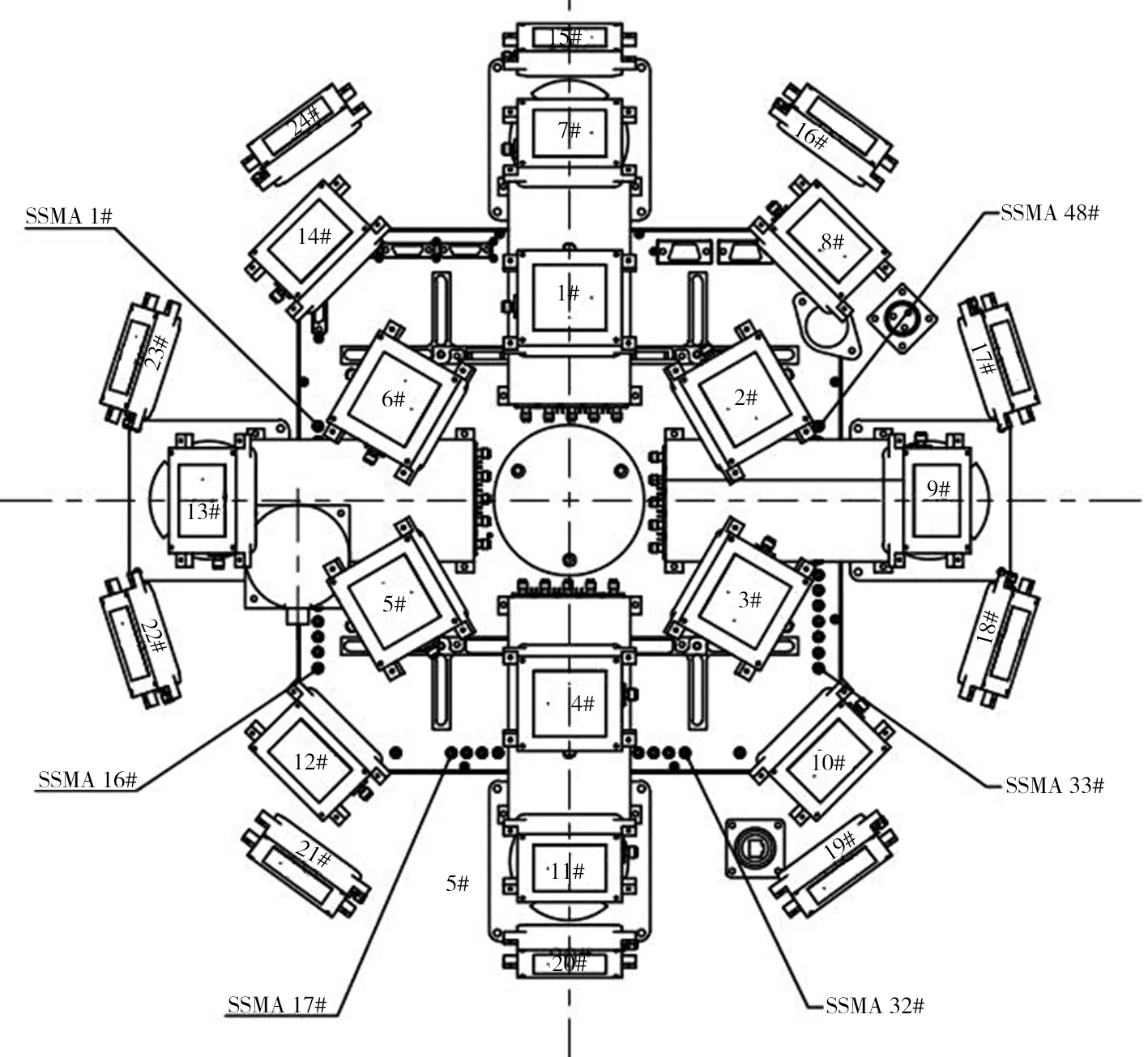
圖8 陣列排布俯視圖Fig.8 Top view of array layout
根據圖8,定義陣元1、7、15為3層陣列上各自的基準陣元,其左旋通道和右旋通道的極化方式相位補償值為0。對于其他陣元的左旋通道,其極化方式相位補償值等于該層的基準單元順時針旋轉到該陣元位置所轉過的角度。例如,陣元2的左旋通道,其極化方式相位補償值為60°;陣元3的左旋通道,其極化方式相位補償值為120°。右旋通道極化補償值為左旋通道相位補償值的相反數。
位置補償和極化補償相加,即可得到每個通道需補償的相位值,即數字波束形成中的權系數。
3.3 陣元權系數計算仿真驗證
在仿真軟件中,按天線布陣方式輸入24個陣元坐標、來波方向俯仰角和方位角,并改變波束指向角進行掃描,查看合成的波束幅度與指向角之間的對應關系,以驗證該波束合成系數計算方式的正確性。由于該仿真的目的是驗證波束形成算法是否能使各陣元信號經數字移相處理后信號相位一致以完成同相疊加,與各陣元接收信號的幅度并無直接關系,所以假設各陣元接收到的信號幅度相同,同時所有陣元均參與數字波束形成。
仿真條件設置為:來波方向方位角70°,俯仰角30°,單個陣元接收信號均為幅度為10的點頻正弦波。仿真結果如圖9所示,圖中分別為仿真結果中波束指向俯仰角固定為30°時合成波束幅度與波束指向方位角的關系、波束指向方位角固定為70°時合成波束幅度與波束指向俯仰角的關系。
(a)波束指向方位角固定70°時,合成波束幅度與波束指向俯仰角的關系
從圖9反映的在仿真條件設置的理想情況下(不考慮來波方向偏移、來波信號無噪聲且24個陣元接收到的信號幅度相同)合成出的波束幅度與波束指向之間的關系,可以看出,當波束指向設置為來波方向(俯仰角30°、方位角70°)時,合成的波束幅度最大,且等于所有單個陣元接收信號幅度之和。經過該算法,各個陣元的信號相位被調整至同相,最大疊加,可認為該計算方法正確。
4 信號處理軟件設計
4.1 軟件模塊結構
FPGA內部軟件模塊示意如圖10所示。
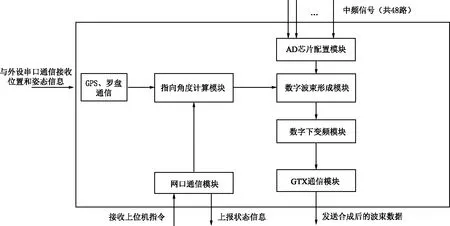
圖10 軟件模塊示意Fig.10 Schematic diagram of software modules
FPGA內部軟件模塊主要由AD芯片配置模塊、GPS電子羅盤通信模塊、網口通信模塊、指向角度計算模塊、數字波束形成模塊、數字下變頻模塊和GTX通信模塊組成。
在信號處理系統中,可以最終形成分別指向3個方向的數字波束數據并輸出。3個方向分別指向3顆衛星的位置,以實現多對一的實時接收通信。
同時,每個方向上,又有左旋、右旋2個波束,實際應用時,可以根據衛星發射天線的極化方式,選擇左旋或右旋波束數據進行解調。例如對于左旋波束,由于左旋通道接收到線極化信號和右旋圓極化信號的幅度會明顯低于左旋圓極化信號,即對非左旋圓極化方式的干擾信號由較強的抑制能力,所以通過左/右旋波束選取的方式,可以增強系統的抗干擾性能[14]。
4.2 模塊功能和設計
信號處理軟件系統中,各模塊所實現的功能及部分模塊的設計方式如下:
① AD芯片配置模塊。對AD芯片進行配置,并輸出48個通道的數字信號給到數字波束形成模塊進行波束的合成。其中AD芯片選型為AD9694,支持16位的IQ采樣,采樣率設置為400 MHz。
② GPS、電子羅盤通信模塊。與外接的GPS和羅盤以串口形式進行通信,解析獲得接收站當前位置的經度、緯度、高度、當地時間和姿態信息。
③ 網口通信模塊。與上位機以網口形式進行通信,上報接收站的一些狀態信息,同時解析出星歷平根數據用于波束指向角度的計算。
④ 指向角度計算模塊。按照3.1中的計算流程,完成對指向角度的計算。由于其中涉及到較為復雜的運算,考慮到FPGA實現復雜計算不便捷,所以將該模塊通過MicroBlaze軟核實現。軟核與FPGA之間的通信采用雙端RAM的形式,完成星歷數據、位置和姿態信息和指向角度計算結果的數據交互。
⑤ 數字波束形成模塊(DBF)。根據指向角度計算模塊輸出的俯仰角和方位角和作為固定參數存儲在模塊內部的各個陣元的坐標,按3.2中的方法計算每個通道的權系數,并與AD芯片控制模塊輸出的對應通道采樣數據相乘,最后累加完成數字波束形成。最多可同時形成指向3個不同方向的6個波束數據,每個波束由24個左旋通道或24個右旋通道的數據經加權后累加合成。為了獲得更大的動態范圍,累加后的結果支持自定義截位輸出,截位控制字由上位機指定。復雜的權系數計算過程通過Vivado HLS構造自定義IP核實現;權系數與通道相乘通過48個并行的乘法器實現;為了優化時序,累加的操作采用分級累加的形式,以幾個時鐘的延時為代價獲得更好的時序性能。波束合成模塊構成示意如圖11所示。
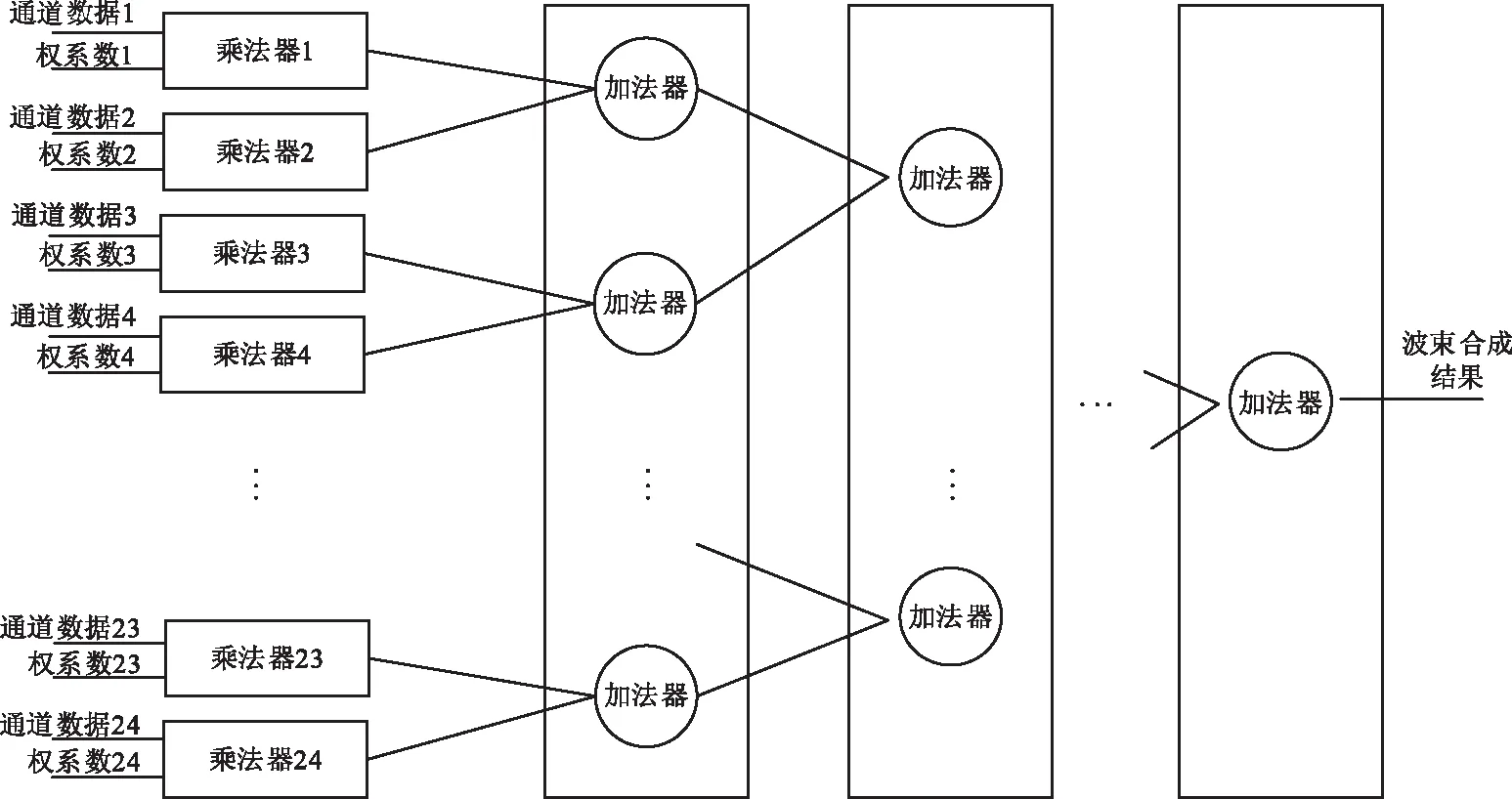
圖11 波束合成模塊構成示意Fig.11 Schematic diagram of beam forming module structure
⑥ 數字下變頻模塊(Digital Down Conversion,DDC)。對波束進行各自特定頻率的數字下變頻,將其調整到零中頻,并完成數據抽取以降低數據率。數控振蕩器(Numerically Controlled Oscillator,NCO)核提供的本振頻率由上位機指定。為了降低運算量和資源消耗,工程采用先DBF,再DDC的形式,只需要6個混頻器、6個濾波器和3個NCO。降低了IP核的使用量,減少FPGA資源消耗。數字下變頻模塊示意如圖12所示。
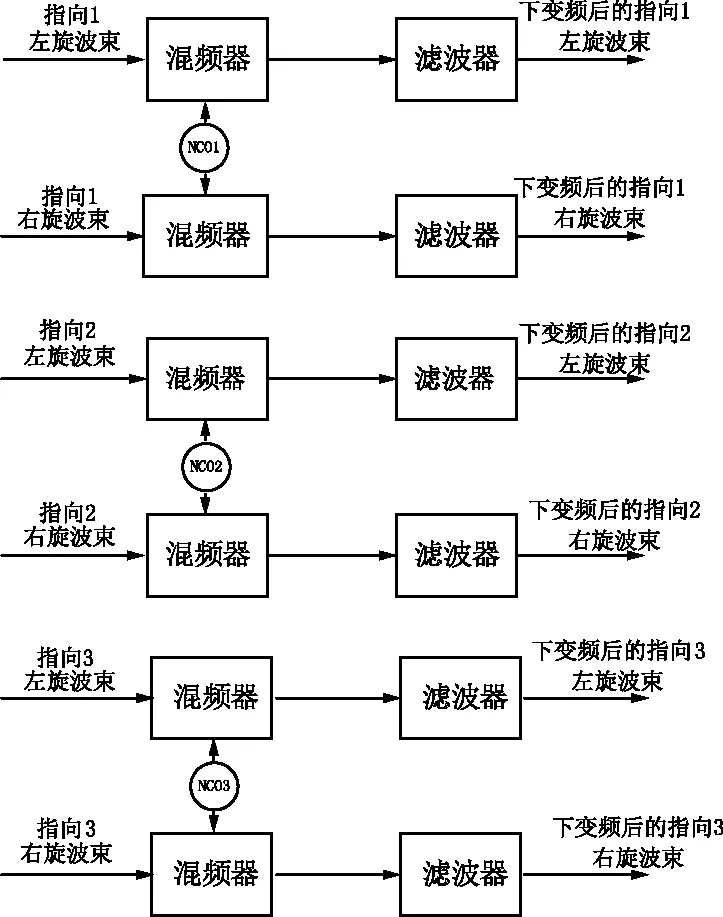
圖12 數字下變頻模塊示意Fig.12 Schematic diagram of digital down conversion module
⑦ GTX通信模塊。將數字下變頻模塊輸出的經過下變頻和抽取過后的波束數據打包整合,并按通信協議中的幀格式通過GTX接口發送到解調設備。底層協議采用XILINX FPGA的aurora 8B10B協議。
4.3 FPGA芯片選型及資源使用情況
根據在方案設計階段的資源估計,該系統的FPGA需要處理48個信道的信號分選,采用乘法器復用等技術,最終所需的乘法器數量為1 000左右。同時合成后的波束信號通過GTX通道進行輸出,所以需要選擇帶有GTX接口的FPGA信號。
信號處理系統的的FPGA芯片最終選用xc7vx690tffg1927-2,在Xilinx Vivado 2016.3開發平臺中完成FPGA工程的編譯。編譯后的各資源使用情況均在正常范圍內,其中LUT資源占用40%,LUTRAM資源占用15%,FF資源占用20%,BRAM資源占用25%,DSP資源占用29%。
編譯后的FPGA資源使用情況如圖13所示。
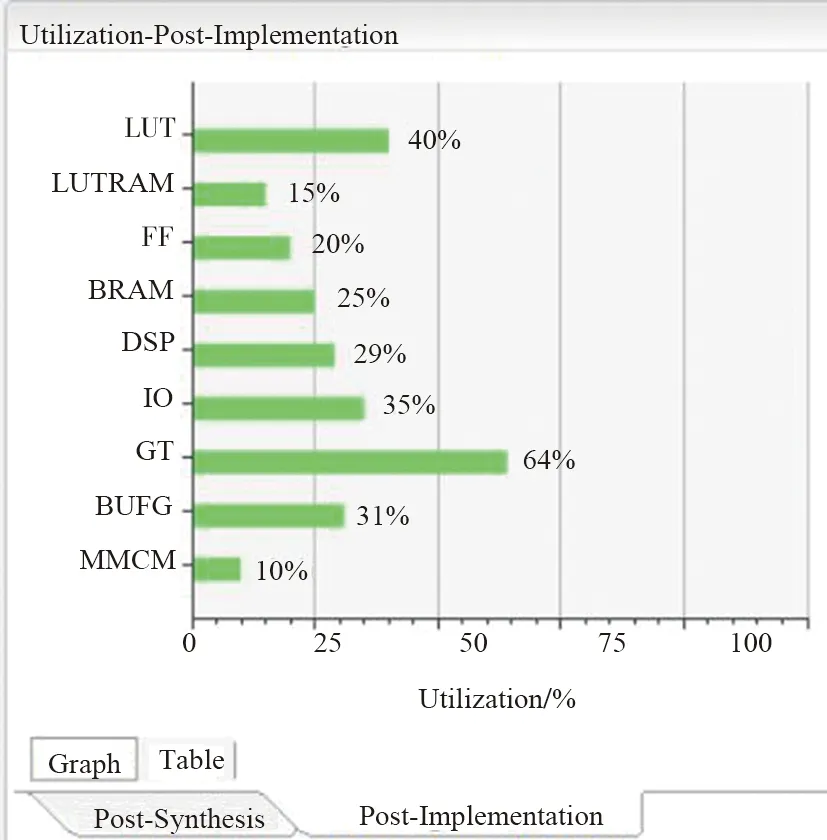
圖13 FPGA資源使用情況Fig.13 FPGA resource utilization
5 實驗結果
為了測試系統接收功能的正確性,并說明系統合成波束的性能優劣程度,通過增益噪聲溫度比(G/T)值的測量實驗進行驗證和分析。
由陣元排布方式可知,俯仰角度越大(即目標高度越低)的來波方向,參與合成的陣元越少,波束形成的性能也越差。所以實驗條件中的俯仰角設置為75°以驗證最差條件下的系統功能正確性和性能優劣,如果此條件下系統能正常工作,說明系統滿足0°~75°俯仰的覆蓋范圍要求,同時可測出所有來波方向中最差的G/T值性能。
實驗場景如圖14所示。
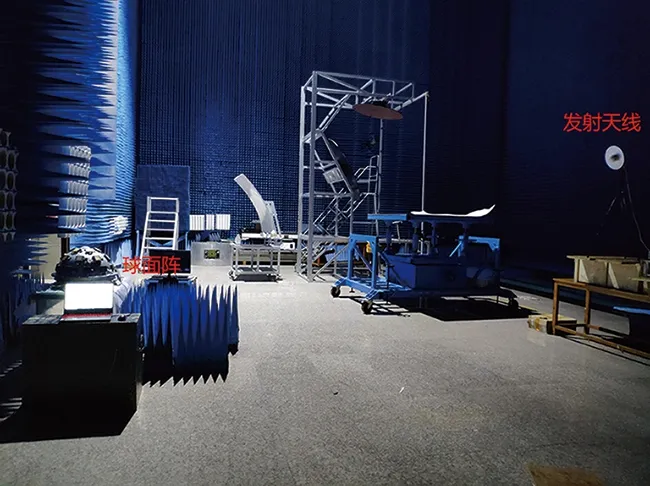
圖14 實驗場景Fig.14 Experimental scene
在微波暗室中,將球面陣和發射天線架設在固定位置,水平距離6.1 m,發射天線高度比球面陣球心高1.6 m,發射天線位于球面陣方位角30°、俯仰角75°的方向。球面陣波束指向設置為該方向,在Vivado Hardware Manager平臺上分別觀察發射信號源打開和關閉時的波束合成結果,分別換算成信號功率和噪聲功率,計算G/T值。
在Vivado Hardware Manager平臺上觀察到合成出的信號波形如圖15所示。
作為對比,同時觀察波束方位角指向10°和0°時合成出的波束情況。圖15中H0BeamOut_1[37:20]為方位角指向30°時的合成波束。可以看出,當波束指向方位角偏離30°時,合成出的波束幅度出現明顯的下降。
將載波合成波束波形導出到Matlab中進行功率計算,結合關閉信號源時計算出的噪聲功率,采用下式可計算出[15-16]:
228.6(dB/K),
(4)
式中,C為載波功率;N為噪聲功率;10log(RBW)為噪聲帶寬;EIRP為發射天線的發射功率;Lp為傳播空間損耗。實驗結果如表1所示,G/T值為-13.2 dB/K。
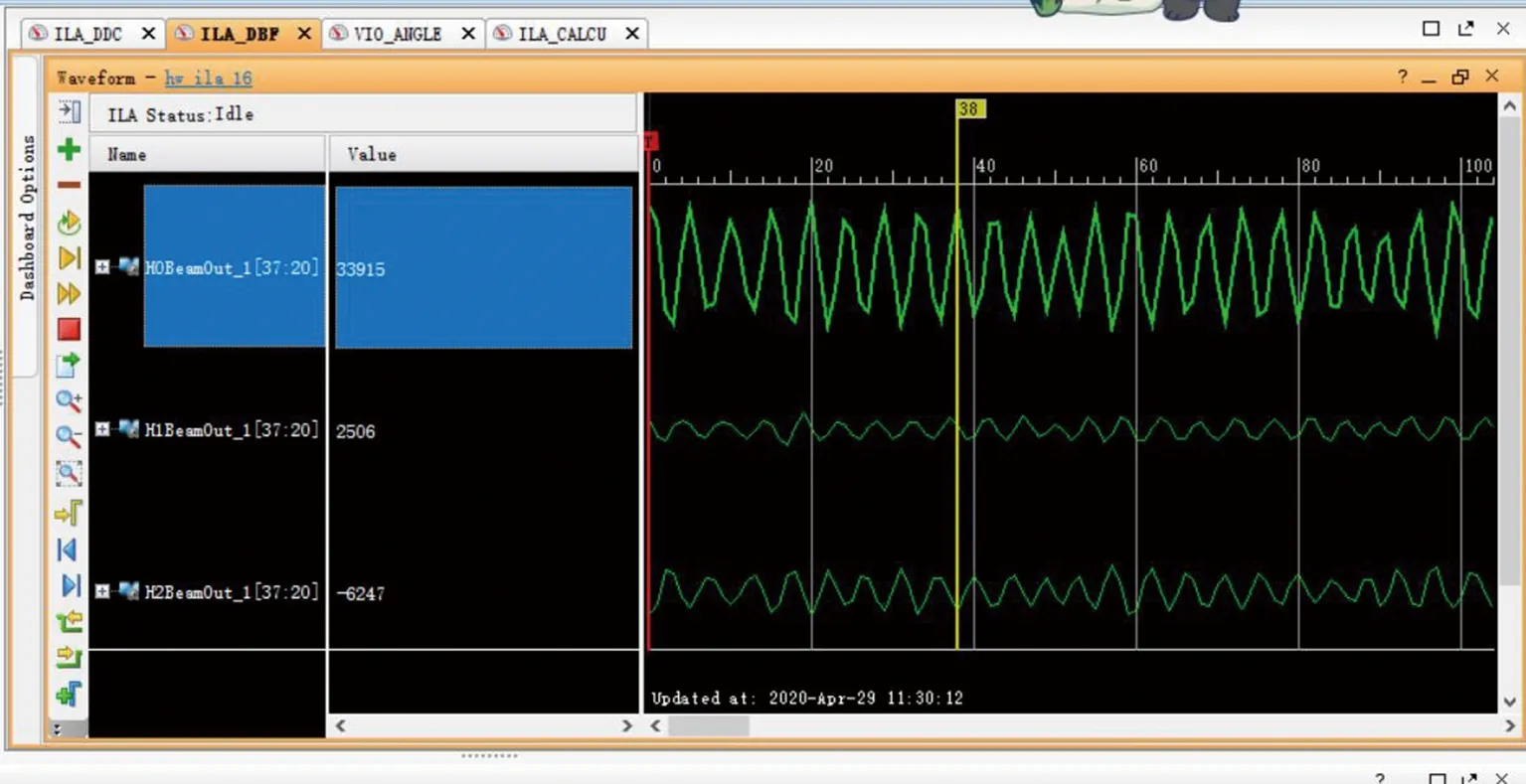
圖15 載波合成波束波形Fig.15 Carrier synthetic beam waveform

表1 G/T值測量結果Tab.1 Measurement result of G/T value
6 結束語
本文給出了一種共形陣的星地通信地面接收波束形成器的設計過程,并完成了工程實現。以半球面的天線陣列形式對大空間覆蓋面的射頻信號進行接收,在FPGA平臺上完成信號處理,并輸出波束數據。系統可根據自主定位信息和上位機指定的衛星信息,實時完成對指向角度和波束形成權系數的計算,實現空間范圍內的多波束數字波束形成。經實驗驗證,系統功能完整,性能良好,G/T值可達到-13.2 dB/K,可以滿足空間通信過程中地面端的接收需求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06