汽車EHB 系統(tǒng)輪缸壓力的BangBang-模糊PI 控制
2021-01-27 09:41:10吳中華郝永常
機械設計與制造 2021年1期
吳中華,郝永常
(1.無錫南洋職業(yè)技術學院,江蘇 無錫 214100;2.邯鄲學院,河北 邯鄲 056000)
1 引言
隨著汽車技術的發(fā)展,汽車速度不斷提升,制動系統(tǒng)作為汽車安全最有力的保障系統(tǒng),其快速精確的響應能力是汽車安全的重要保證[1],因此研究制動系統(tǒng)控制問題意義重大。
以電子液壓制動系統(tǒng)(Electronic Hydraulic Brake,EHB)為研究對象,EHB 系統(tǒng)控制方法的研究主要集中在輪缸制動壓力的控制和穩(wěn)定性控制兩個方面,其中輪缸制動壓力控制是穩(wěn)定性控制的基礎。文獻[2]建立了簡化的ABS 系統(tǒng)模型,基于此模式設計了H∞魯棒控制器,提高了汽車制動性能;文獻[3]建立了EHB系統(tǒng)動力學模型,采用單神經元PID 算法提高了系統(tǒng)動態(tài)特性;文獻[4]使用能量法分析了失穩(wěn)動能和縱向運動的關系,使用相平面法給出了穩(wěn)定性判據;文獻[5]提出了基于模型預測的穩(wěn)定性控制方法,在高低附著路面上驗證了其優(yōu)越性。
研究了電子液壓制動系統(tǒng)輪缸壓力控制問題,旨在提高對目標壓力的跟蹤快速性和精確度。建立EHB 系統(tǒng)數學模型,設計了BangBang-模糊PI 組合控制方法。經仿真驗證可以看出,BangBang-模糊PI 控制方法可以快速跟蹤輪缸的增壓和減壓過程,而且在保壓過程中實現(xiàn)了完全跟蹤。
2 EHB 系統(tǒng)建模
建立EHB 系統(tǒng)數學模型是設計EHB 系統(tǒng)控制器的基礎,因此首先建立EHB 系統(tǒng)模型。本節(jié)首先介紹了EHB 系統(tǒng)工作原理,而后建立了系統(tǒng)數學模型。
2.1 EHB 系統(tǒng)工作原理
EHB 系統(tǒng)的結構原理圖,如圖1 所示。此系統(tǒng)由液壓系統(tǒng)和控制系統(tǒng)組成,液壓系統(tǒng)提供制動過程提供能源來源,控制系統(tǒng)根據踏板位移和車輛狀態(tài)確定控制信號[6]。
控制系統(tǒng)核心元件為電子控制單元(Electronic Control Unit,ECU),以輪缸制動壓力為控制對象,ECU 根據踏板位移計算出駕駛員期望的制動壓力,輪缸壓力傳感器實時測得當前的輪缸壓力,ECU 根據輪缸的期望壓力與實際壓力之差,確定不同占空比的PWM 波用于控制增壓閥和減壓閥,不同的占空比決定了不同的閥口開度,實現(xiàn)對輪缸壓力的精確控制。
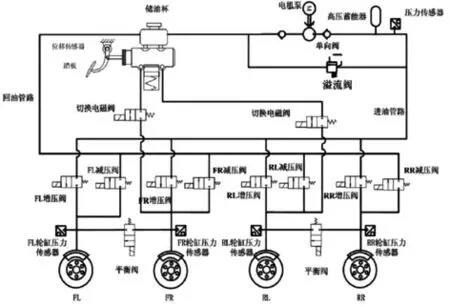
圖1 EHB 系統(tǒng)結構原理圖Fig.1 Structure Principle Diagram of EHB System
液壓系統(tǒng)動力源為電機泵與高壓儲能器,當儲能器壓力大于系統(tǒng)閾值時,溢流閥打開使液壓油進入儲油杯,保證儲能器中建立穩(wěn)定的油壓。EHB 系統(tǒng)制動時分為三個階段:增壓、保壓、減壓。增壓時ECU 控制增壓閥打開、減壓閥關閉,制動液由高壓儲能器經增壓閥進入輪缸,直到達到期望壓力;保壓時ECU 控制增壓閥和減壓閥關閉,輪缸壓力不再變化;減壓時ECU 控制增壓閥關閉、減壓閥打開,制動液由輪缸經減壓閥流回儲油杯直至達到預期壓力。
2.2 EHB 系統(tǒng)建模
由圖1 可知,EHB 液壓系統(tǒng)關鍵元件包括高壓蓄能器、高速開關電磁閥、制動輪缸、制動管路等。首先建立關鍵元件的數學模型。
2.2.1 高速開關電磁閥
通過控制高速開關電磁閥的線圈供電情況控制電磁閥的通斷,當對電磁閥線圈供電時,線圈會產生磁力作用吸引銜鐵,克服彈簧力和制動液阻力,使電磁閥打開;當線圈斷電時磁力作用消失,電磁閥在彈簧力作用下關閉閥門。
高速開關電磁閥可以分為電路部分、磁路部分和機械部分等,分別對三個部分進行建模。
電路部分:使用基爾霍夫電壓定律,得:

式中:U—驅動電壓;i—線圈電流;R—線圈電阻;N—線圈匝數;φ—線圈磁通量;t—時間。
磁路部分:由磁路基爾霍夫定律可知Ni=φRm,式中Rm為總磁阻,由氣隙磁阻Rδ和鐵磁材料磁阻Rmf組成,即:
式中:δ—閥芯與鐵芯氣隙寬度;x—閥芯位移;lm—磁導體有效長度;μ0—真空磁導率;S0—氣隙截面積。由此可得磁路部分數學模型為:

機械部分:以閥芯為控制對象,由牛頓第二定律得:

式中:ms—閥芯質量;B—速度阻力系數;ks—彈簧剛度;x0—彈簧初始位移。式(1)~式(3)即為高速開關電磁閥模型。
2.2.2 高壓蓄能器
高壓蓄能器結構原理,如圖2(a)所示。蓄能器由氣腔和液腔兩部分組成,通過簡化將其等效為彈簧-阻尼模型,如圖2(b)所示。
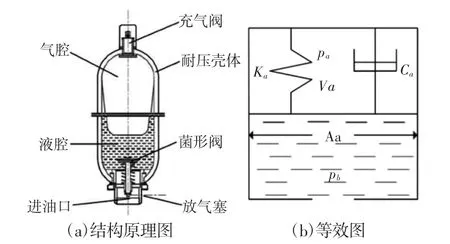
圖2 高壓蓄能器結構圖與等效圖Fig.2 Structure and Equal Diagram of High-Pressure Accumulator
記 pa為氣腔壓力,pb為液腔壓力,ka為氣體剛度,Ca為氣體阻尼系數,Va為氣體體積,Aa為制動液截面積,ma為制動液質量,以液面位移為控制對象,則:

式中:Bb—制動液阻尼系數。
當制動液流出蓄能器時,氣體體積相應變化,可以得到制動液流出量q 與氣體體積Va的關系式為:

由玻義耳定律可知,對于蓄能器內封閉的氣體,在不考慮工作過程中溫度變化的情況下,有:

式中:pa0、Va0—初始時刻的氣體壓力與體積。式(4)~式(6)即為高壓蓄能器的數學模型。
2.2.3 制動輪缸
制動輪缸將制動液壓力轉化為制動鉗的制動力,由流體連續(xù)性方程可知:

式中:Qc—制動液流量;Ac—活塞截面積;y—制動輪缸活塞位移;Ctc—輪缸泄露系數;pc—制動壓力;Vt—制動輪缸容積;βe—制動液彈性模量。
制動液進入制動輪缸,帶動活塞運動,使制動鉗對車輪產生制動力,以輪缸活塞和制動鉗為控制對象,由牛頓第二定律得:

式中:mc—活塞與制動鉗質量和;Bc—活塞等效阻尼系數;kc—輪缸內彈簧剛度;y0—彈簧初始位移。式(7)、式(8)即為制動輪缸數學模型。
2.2.4 管路
管路將各元件連接為一個系統(tǒng),將管路前端的流量和壓力作為輸入,將后端的流量和壓力作為輸出。記管路前端流量為q1、壓力為p1,后端流量為q2、壓力為p2,考慮管道摩擦阻力,得管路內制動液運動方程為:

式中:ρ—制動液密度;L—制動管路長度;Ap—管路截面積;Rf—管路摩擦力,且有 Rf=(32υρLq2)/d2,其中:υ—制動液粘度;d—管路直徑。式(9)為管路數學模型。
2.2.5 EHB 系統(tǒng)模型
將EHB 系統(tǒng)簡化為由管路將各基本元件連接而成的系統(tǒng),由于液壓系統(tǒng)的現(xiàn)實復雜性,建立EHB 系統(tǒng)時做如下假設:(1)將管路中的壓力損失考慮到管路模型中;(2)不考慮高速電磁閥切換時的瞬間沖擊;(3)不考慮制動輪缸的彈性形變。在此假設條件下,將式(1)~式(9)結合得到EHB 系統(tǒng)模型。
3 BangBang-模糊PI 組合控制原理
本節(jié)首先提出了BangBang-模糊PI 組合控制原理,而后分別設計了BangBang 控制器和模糊PI 控制器。
3.1 BangBang-模糊PI 組合控制原理
BangBang 控制最大的優(yōu)點是反應速度快,可以使輪缸壓力快速跟蹤目標值,但其顯著缺點是穩(wěn)態(tài)誤差較大,使輪缸壓力在目標值上下反復波動[7]。模糊PI 控制顯著優(yōu)點是超調量和穩(wěn)態(tài)誤差極小,能夠穩(wěn)定跟蹤目標壓力,最大缺點是調節(jié)時間長、反應速度慢。因此這兩種控制方式具有明顯的互補性,為了使輪缸壓力能夠快速準確地跟蹤目標壓力,首先使用BangBang 控制,使輪缸壓力迅速逼近目標壓力,當輪缸壓力實際值與目標值誤差小于某一閾值時,切換至模糊PI 控制,使輪缸實際壓力精確跟蹤目標壓力。
設計的BangBang-模糊PI 控制器,如圖3 所示。以輪缸壓力為控制目標,以高速開關電磁閥的PWM 占空比為控制信號,控制器通過輸出不同占空比的PWM 信號,控制高速開關電磁閥的開閉時間,從而控制制動輪缸的壓力,并依據輪缸壓力誤差調節(jié)PWM 信號,直至精確跟蹤目標壓力。
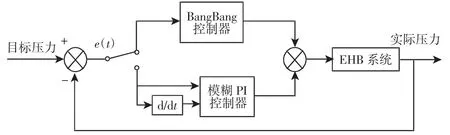
圖3 BangBang-模糊PI 控制器Fig.3 BangBang-Fuzzy PI Controller
BangBang-模糊PI 控制器中,閾值的設定對控制效果影響較大,閾值的設定只能通過反復試驗設定,將閾值設定為5bar。
3.2 BangBang 控制
BangBang 控制也稱為開關控制,其輸出只有最大和最小兩種極限狀態(tài),這種控制方式可以使被控對象以最短的時間、最快的速度跟蹤目標值。為了使輪缸實際制動壓力快速跟蹤目標壓力,當兩者偏差較大時,使用BangBang 控制調節(jié)PMW 占空比,方法為:
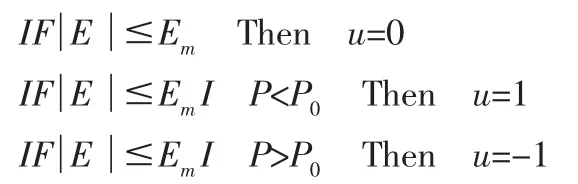
式中:Em—壓力閾值,按照規(guī)定有Em=5bar;P—制動輪缸實際壓力;P0—輪缸期望壓力;u—PMW 占空比,當u=1 時對進液閥進行調節(jié),當u=-1 時對出液閥進行調節(jié)。
4 模糊PI 控制
4.1 模糊PI 控制基本原理
模糊PI 控制由PI 控制[8]和模糊推理組成,通過建立輪缸壓力誤差及誤差變化率與PI 參數的模糊關系,使用模糊規(guī)則實時整定PI 控制參數,實現(xiàn)最優(yōu)的控制效果。模糊PI 控制的原理圖,如圖4 所示。
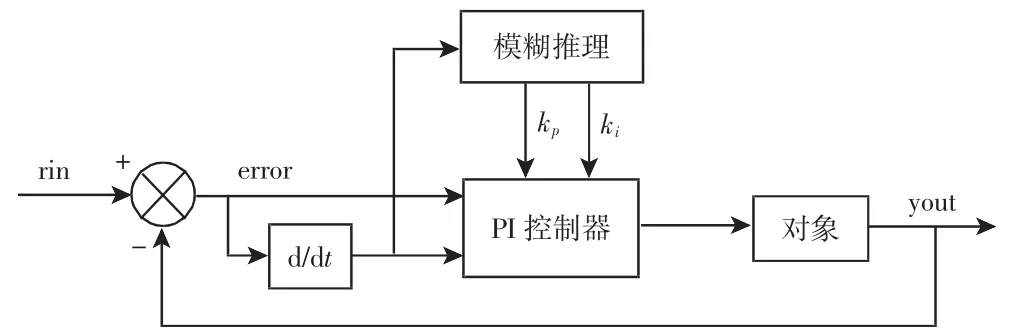
圖4 模糊PI 控制原理圖Fig.4 Principle of Fuzzy PI Controller
圖中:yout(k)—k 時刻輪缸實際壓力;rin(k)—時刻輪缸期望壓力,E(k)=rin(k)-yout(k)—k 時刻壓力誤差;EC(k)=E(k)-E(k-1)—k 時刻誤差變化率。通過建立 E(k)、EC(k)與 kp、ki的模糊關系,實時整定kp、ki值,而后進行PI 運算得到不同占空比的PWM 信號。
4.2 模糊PI 控制器設計
模糊PI 控制器設計過程包括精確量的模糊化、建立模糊規(guī)則、去模糊化等三個步驟[9]。
4.2.1 精確量模糊化
在模糊PI 控制器中,輸入量為輪缸壓力誤差E 和誤差變化率EC,輸出量為PI 控制參數kp和ki。壓力誤差論域為E∈[-150,150],誤差變化率論域為 EC∈[-300,300],比例系數論域為kp∈[0.005,0.025],積分系數論域為 ki∈[0.005,0.025]。將 E、EC模糊化為 5 個等級{NB、NS、ZE、PS、PB},對應為負大、負小、零、正小、正大。將 kp、ki模糊化為 4 個等級{PZ、PS、PM、PB},對應為正零、正小、正中、正大。使用三角形隸屬度函數,如圖5 所示。
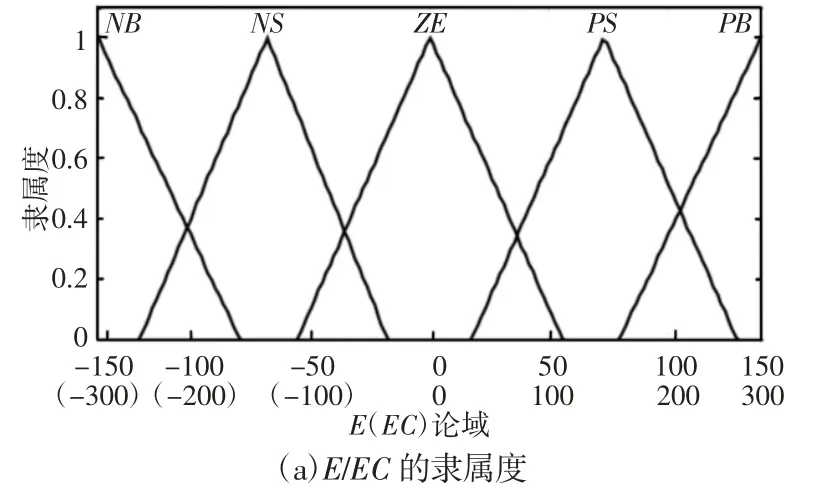
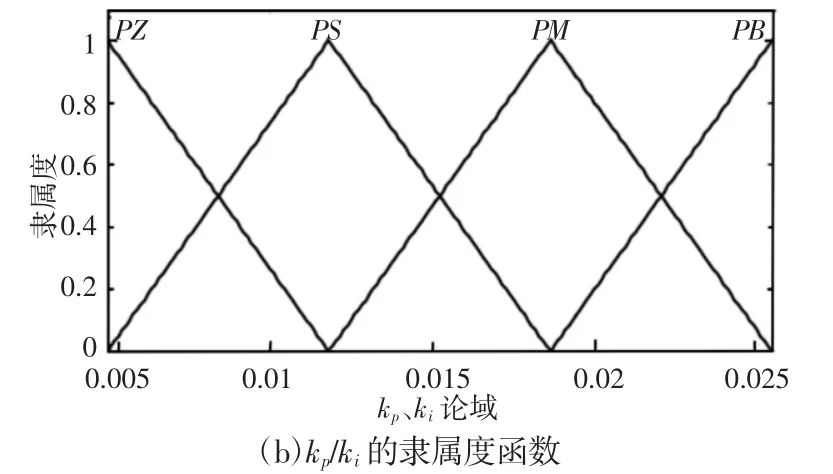
圖5 控制量與輸出量的隸屬度函數Fig.5 Membership Function of Controlled Quantity and Output Quantity
4.2.2 制定模糊邏輯規(guī)則
從穩(wěn)定性、響應速度、超調量和穩(wěn)態(tài)精度等四個方面確定模糊控制規(guī)則。kp對穩(wěn)態(tài)誤差和超調量影響較大,當kp增大時,可以使靜態(tài)誤差減小,但超調量會增大;ki在PI 控制中的作用是感知誤差變化趨勢,使其快速回到穩(wěn)定狀態(tài)。基于以上分析,制定kp、ki的模糊邏輯規(guī)則,如表1、表2 所示。
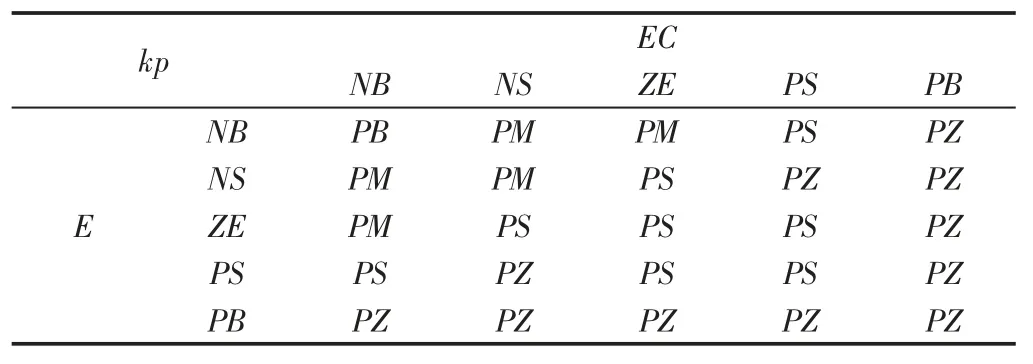
表1 比例系數模糊邏輯規(guī)則Tab.1 Fuzzy Logical Rule of Proportion Coefficient
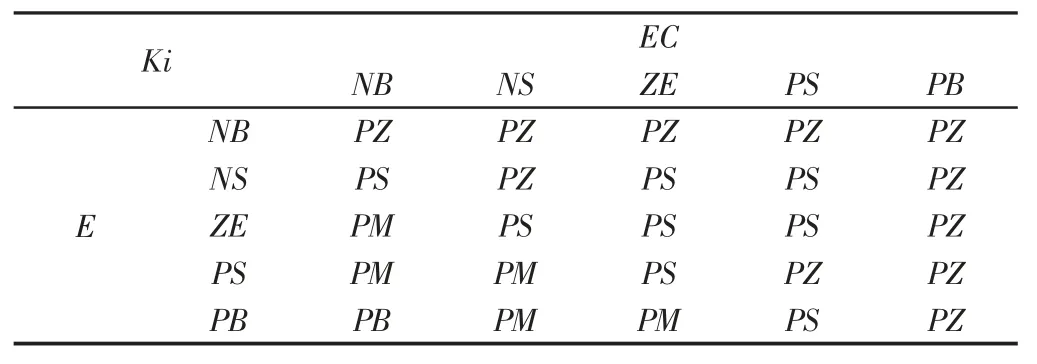
表2 積分系數模糊邏輯規(guī)則Tab.2 Fuzzy Logical Rule of Integration Coefficient
4.2.3 去模糊化
由于加權平均法充分利用了隸屬度最大元素提供的主導信息,因此選用加權平均法進行解模糊化[10],即:

式中:z*—去模糊化后的參數;n—模糊元素的個數;?j—模糊集的元素;μ(?j)—元素?j的隸屬度。通過去模糊化得到了PI 控制參數kp和ki的最優(yōu)值,使用PI 控制得到電磁閥的PWM 占空比為:

式中:u—PWM 信號占空比。
5 仿真驗證及分析
5.1 仿真平臺搭建
依據EHB 系統(tǒng)數學模型建立其仿真模型,基于BangBang-模糊PI 控制的輪缸壓力控制仿真模型,如圖6 所示。BangBang控制的輸入信號為輪缸壓力誤差,輸出為不同占空比PWM 信號;模糊PI 控制器的輸入信號為輪缸誤差及其變化率,輸出為PWM 信號占空比;EHB 系統(tǒng)輸入為不同占空比PWM 信號,輸出為輪缸實際壓力值。
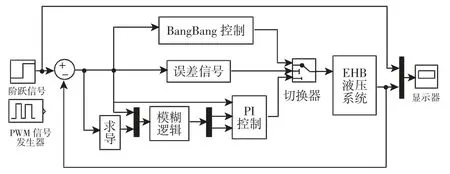
圖6 輪缸壓力控制仿真模型Fig.6 Simulink Model of Wheel Cylinder Pressure Control
5.2 仿真結果及分析
對輪缸壓力跟蹤效果的驗證,包括階躍信號跟蹤、三角波跟蹤、正弦波跟蹤、線性信號跟蹤等多種驗證方式,由于階躍信號跟蹤是對任意系統(tǒng)最嚴峻的考驗,因此選用階躍壓力信號為跟蹤目標。
首先以90bar 階躍信號為跟蹤目標,分別使用BangBang 控制、模糊PI 控制、BangBang-模糊PI 控制對階躍信號進行跟蹤,結果,如圖7 所示。
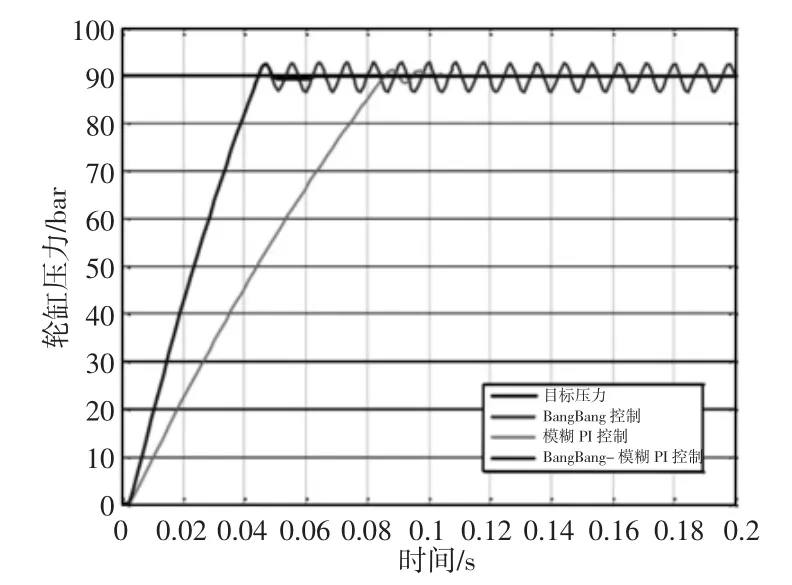
圖7 90bar 階躍信號跟蹤效果Fig.7 Tracking Effect of 90bar Step Signal
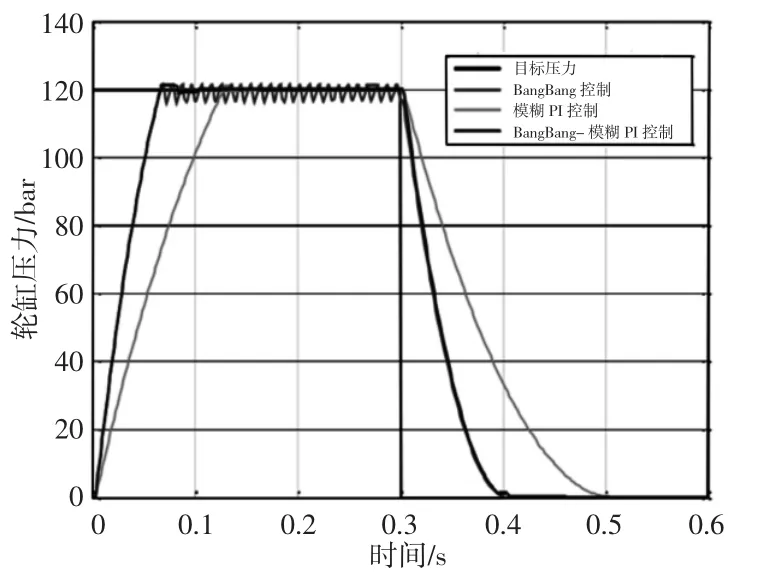
圖8 120bar 階躍信號跟蹤效果Fig.8 Tracking Effect of 120bar Step Signal
從圖中可以看出,使用BangBang 控制跟蹤階躍信號時,能夠快速達到目標值附近,耗時約為0.044s,而后在目標值上下波動,系統(tǒng)穩(wěn)態(tài)誤差較大;使用模糊PI 控制時,系統(tǒng)穩(wěn)態(tài)誤差極小,由于控制慣性只在(0.083~0.01)s 之間進行了小幅度波動,而后精確跟蹤目標值,但是階躍響應較慢,耗時為0.83s,比BangBang 控制耗時增加了約一倍;而BangBang-模糊PI 控制融合了兩種控制算法的優(yōu)點,控制前期輪缸目標壓力與實際壓力誤差較大,所以使用BangBang 控制以最快速度跟蹤目標值,控制后期(當誤差小于5bar 時)由于壓力誤差較小,使用能夠精確跟蹤的模糊PI控制器,從控制效果看,BangBang-模糊PI 控制器不僅跟蹤速度快,而且跟蹤精度高。為了驗證BangBang-模糊PI 控制系統(tǒng)對減壓過程的跟蹤效果,設置120bar 方波信號,首先增壓至目標壓力120bar,而后保持此壓力值,保壓一段時間后減壓到0bar,分別使用BangBang 控制、模糊PI 控制、BangBang-模糊PI 控制跟蹤此變化過程,結果,如圖8 所示。
通過120bar 方波信號的增減壓跟蹤過程可以看出,在增壓過程中,BangBang 控制和組合控制方法反應速度快,0.06s 實現(xiàn)了目標壓力跟蹤,而模糊PI 控制用了0.13s;在保壓過程中,模糊PI 控制和組合控制實現(xiàn)了完全跟蹤,穩(wěn)態(tài)誤差為0,而在BangBang 控制下輪缸壓力在(116~122)bar 間做往復運動,系統(tǒng)穩(wěn)定性很差;在減壓過程中,BangBang 控制和組合控制能夠快速跟蹤目標值,耗時為0.1s,而模糊PI 控制耗時為0.2s。由此可以看出,BangBang-模糊PI 控制融合了兩種控制算法的優(yōu)點,不僅能夠快速跟蹤增壓和減壓過程,而且保壓過程中實現(xiàn)了完全跟蹤。
6 結論
主要研究了電子液壓制動系統(tǒng)輪缸壓力控制問題,得出了以下結論:(1)在BangBang 控制下,被控量可以以最快速度跟蹤目標值,但是穩(wěn)態(tài)誤差大,存在反復波動;(2)使用模糊PI 控制時,被控量可以精確跟蹤目標值,但是調節(jié)時間長、反應速度慢;(3)BangBang-模糊PI 組合控制方法不僅能夠快速跟蹤增壓和減壓過程,而且在保壓時實現(xiàn)了完全跟蹤。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
