基于滑模算法的激光測(cè)量平臺(tái)動(dòng)靜態(tài)誤差補(bǔ)償仿真
2021-01-24 09:36:02趙炳巍劉一鴻
制造業(yè)自動(dòng)化 2021年1期
關(guān)鍵詞:測(cè)量
孫 瑜,賈 峰,曹 巖,趙炳巍,劉一鴻
(西安工業(yè)大學(xué) 機(jī)電工程學(xué)院,西安 710021)
0 引言
自主搭建激光測(cè)量平臺(tái),以點(diǎn)激光位移傳感器作為測(cè)量手段,下位機(jī)通過(guò)CAD設(shè)計(jì)基礎(chǔ)框架,以4個(gè)二項(xiàng)混合步進(jìn)電機(jī)作為X、Y、Z、C軸運(yùn)動(dòng)手段。整體結(jié)構(gòu)如圖1所示。二項(xiàng)混合電機(jī)因其具有精度高、價(jià)格低廉、效率高等優(yōu)點(diǎn)被廣泛應(yīng)用于制造、娛樂(lè)、測(cè)量、航天等各個(gè)行業(yè),對(duì)于一些精度要求不是很高的廠家來(lái)說(shuō),因?yàn)槎?xiàng)混合電機(jī)具有“讓走多少就走多少”的特點(diǎn),所以節(jié)省了很多閉環(huán)所需元器件的成本的控制難度,只進(jìn)行開環(huán)控制。但是隨著現(xiàn)在眾多行業(yè)對(duì)于精度要求的要求越來(lái)越高,且訂單量大、工作時(shí)長(zhǎng)的增加以及一些工作中產(chǎn)生的不確定性因素,開環(huán)的控制方法已滿足不了部分行業(yè)的需求(比如精密測(cè)量)。以自主搭建的點(diǎn)激光位移測(cè)量裝置為背景,提出對(duì)二項(xiàng)混合電機(jī)進(jìn)行靜態(tài)綜合誤差建模,動(dòng)態(tài)滑膜閉環(huán)控制的方法以達(dá)到對(duì)二項(xiàng)混合步進(jìn)電機(jī)實(shí)現(xiàn)動(dòng)態(tài)誤差補(bǔ)償?shù)哪康模M(jìn)一步提高控制精度,確保電機(jī)系統(tǒng)可以精確穩(wěn)定的運(yùn)行。

圖1 點(diǎn)激光位移測(cè)量裝置
1 靜態(tài)誤差綜合數(shù)學(xué)建模
靜態(tài)誤差一般與結(jié)構(gòu)的剛度、安裝制造加工精度、結(jié)構(gòu)變形等有關(guān)[1]。在實(shí)際的應(yīng)用過(guò)程中,步進(jìn)電機(jī)不可能單獨(dú)使用,往往和其他裝置進(jìn)行裝配后使用(比如滾珠絲杠)因此不可避免的就會(huì)產(chǎn)生靜態(tài)誤差。在電機(jī)的閉環(huán)控制系統(tǒng)當(dāng)中,本文以滾珠絲杠裝載單步進(jìn)電機(jī)為例如圖2所示,對(duì)靜態(tài)誤差進(jìn)行分析建模。

圖2 滾珠絲杠結(jié)構(gòu)
1.1 靜態(tài)誤差分析
在制造和加工行業(yè),任何零部件的加工和生產(chǎn)都不可能沒有誤差的存在,因此在滾珠絲杠也會(huì)存在螺距誤差和反向間隙。步進(jìn)電機(jī)是依靠PC機(jī)傳輸給驅(qū)動(dòng)器的脈沖數(shù)再翻譯成角位移進(jìn)行驅(qū)動(dòng)的,這種靜態(tài)誤差的存在會(huì)影響其定位精度。如圖2所示,設(shè)電機(jī)初始位置為A,經(jīng)過(guò)時(shí)間s之后達(dá)到B,但由于其中靜態(tài)誤差的存在可能會(huì)使電機(jī)達(dá)到B1,此時(shí)若再給電機(jī)一個(gè)回程的指令,使電機(jī)達(dá)到C點(diǎn),則由于誤差的存在只能回到C1點(diǎn)。忽視長(zhǎng)時(shí)間使用因重力產(chǎn)生的直線度誤差,忽視滾珠絲杠的熱變形誤差,將其余誤差綜合考慮。
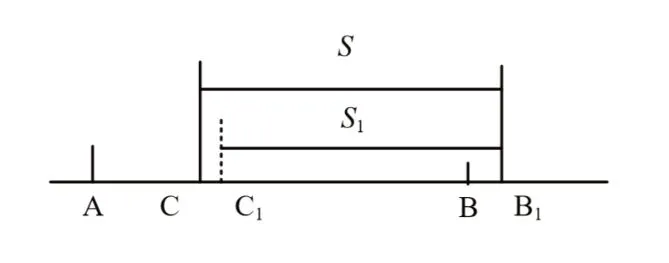
圖3 定位誤差
1.2 靜態(tài)誤差綜合模型
由于各個(gè)誤差之間沒有線性關(guān)系,互不影響,對(duì)于綜合誤差的建立可以通過(guò)采用某些外部測(cè)量設(shè)備對(duì)不同位置的誤差進(jìn)行有限次的測(cè)量,分析和擬合誤差的變化趨勢(shì),對(duì)不同目標(biāo)位置實(shí)現(xiàn)不同的補(bǔ)償量[1]。
多項(xiàng)式回歸方程有一個(gè)顯著的特點(diǎn),任何的曲線都可以根據(jù)階次的不同進(jìn)行擬合處理。當(dāng)測(cè)量樣本為n時(shí),在理論上可以通過(guò)n-1階多項(xiàng)式對(duì)數(shù)據(jù)進(jìn)行擬合[1]。
設(shè)e為因變量,x為自變量,將e與x之間的關(guān)系通過(guò)多元線性回歸方程進(jìn)行表達(dá),即為:
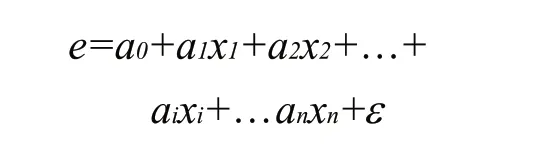
設(shè)對(duì)絲杠電機(jī)模塊進(jìn)行N次測(cè)量,將所測(cè)得的數(shù)據(jù)代入到式(1)中,即將代入,可得ej為:
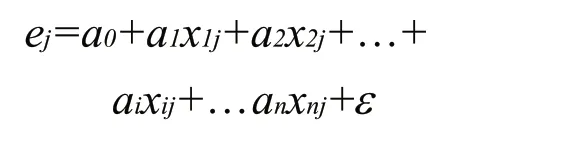
式中:
ai為多元線性回歸方程常數(shù)項(xiàng);(i=0,1,2,…,n);
xj為N次樣本測(cè)量的誤差數(shù)據(jù);(j=0,1,2,…,n);
ej為綜合誤差的擬合數(shù)學(xué)模型;
ε為均值誤差;
通過(guò)對(duì)測(cè)量樣本的數(shù)據(jù)值可以使用最小二乘法對(duì)ai(i=0,1,2,…,n)進(jìn)行求解:
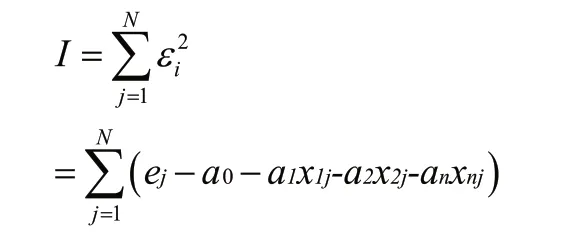
對(duì)函數(shù)求一階偏導(dǎo),并令一階偏導(dǎo)等于0:
將上述方程進(jìn)行整理:
將上述表達(dá)式通過(guò)矩陣方式進(jìn)行表達(dá)求解:
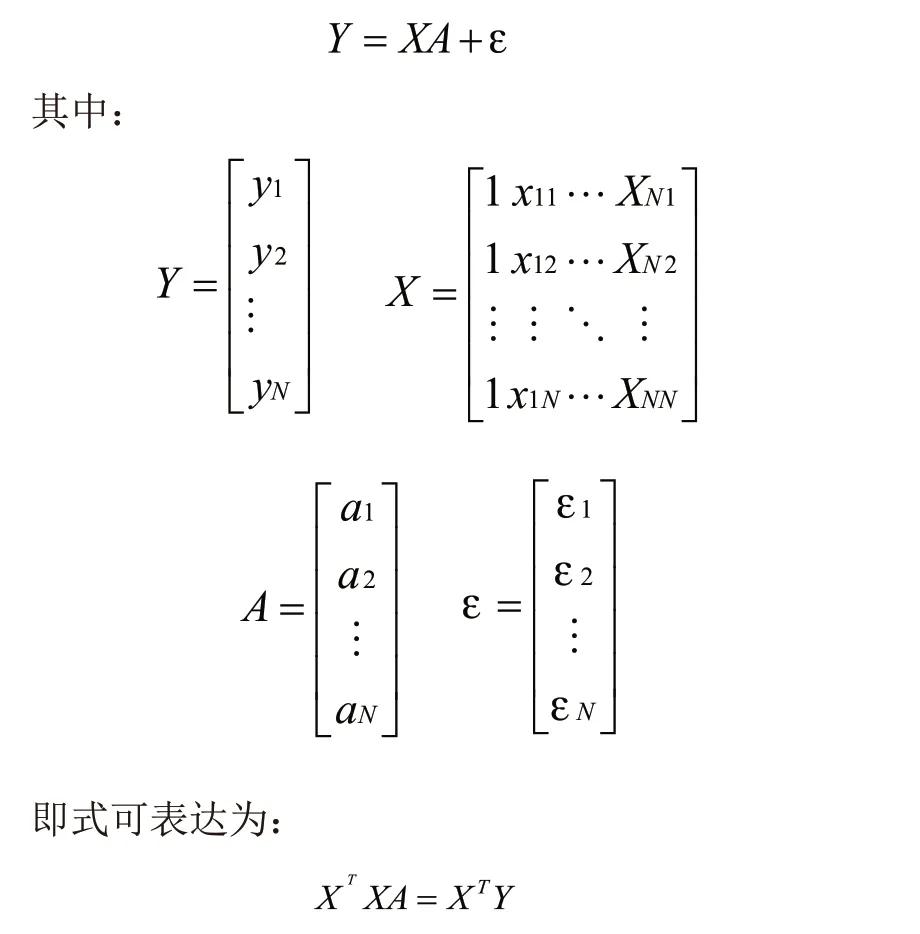
根據(jù)矩陣的性質(zhì),當(dāng)滿秩時(shí)即可求得A中的方程常數(shù)項(xiàng),即:

2 滑模控制的原理
對(duì)于目前的大多數(shù)步進(jìn)電機(jī)控制系統(tǒng)來(lái)說(shuō),往往采用的是PID控制算法,PID控制算法對(duì)于電機(jī)有較好的控制效果,且隨著PID算法的改進(jìn)衍生出的模糊PID、遺傳PID、B-P PID等控制算法都表現(xiàn)出了很好的控制效果,雖然名字不同但目的都是為了求得PID參數(shù)的最優(yōu)解。
PID方法控制步進(jìn)電機(jī)在復(fù)雜的工作狀態(tài)下,仍會(huì)有一些不足,比如工作時(shí)時(shí)擾動(dòng)突然的增加,當(dāng)使用時(shí)間過(guò)長(zhǎng)溫度升高時(shí),電機(jī)的固定參數(shù)發(fā)生變化,PID對(duì)于這種情況的出現(xiàn)并沒有較好的效果。
滑模控制是中多非線性控制的一種,在動(dòng)態(tài)的進(jìn)程中,根據(jù)系統(tǒng)當(dāng)前的狀態(tài)(如偏差)有目的地不斷變化,迫使系統(tǒng)按照預(yù)定“滑動(dòng)模態(tài)”的狀態(tài)軌跡運(yùn)動(dòng),其系統(tǒng)的結(jié)構(gòu)并不固定,因此又稱變結(jié)構(gòu)控制[7]。原理圖如圖3所示。其最主要的優(yōu)點(diǎn)有兩點(diǎn):1)調(diào)節(jié)的參數(shù)少且響應(yīng)速度較快;2)對(duì)運(yùn)行過(guò)程中產(chǎn)生的擾動(dòng)不靈敏,有較好的擾動(dòng)抑制效果。
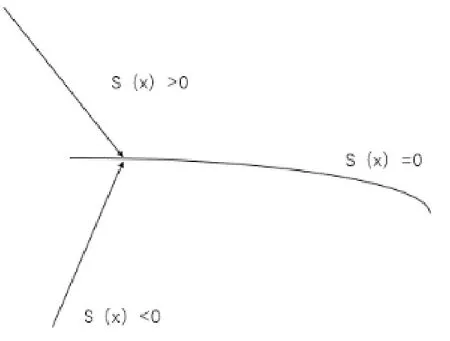
圖4 滑模面原理圖
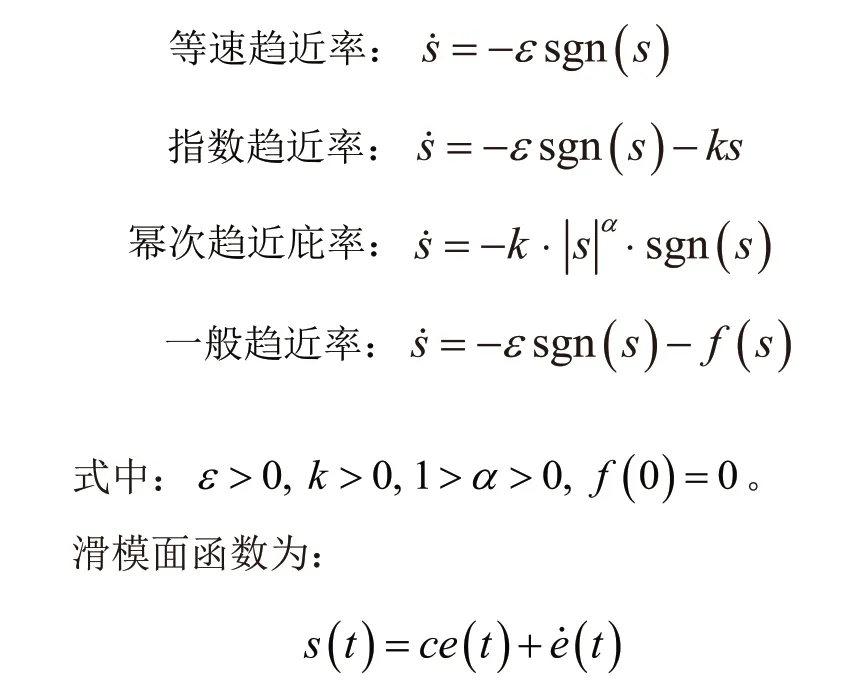
2.1 基于趨近率的滑模控制器的設(shè)計(jì)
在滑模控制中的趨近率有很多種,比如等速、指數(shù)、冪次、一般趨近率等。不同的趨近率有不同的趨近速度,但是目的都是為了讓狀態(tài)量穩(wěn)定在滑模面,過(guò)高的趨近率會(huì)有較好的響應(yīng)時(shí)間,但狀態(tài)量在滑模面附近會(huì)有較大的抖振現(xiàn)象產(chǎn)生[17],加速步進(jìn)電機(jī)的損耗,影響定位精度,縮短步進(jìn)電機(jī)的使用壽命;速度較慢的趨近率響應(yīng)時(shí)間會(huì)降低,但對(duì)于抖振的現(xiàn)象會(huì)有明顯的改善。
其中c>0,滿足Hurwitz條件。
跟蹤誤差為:
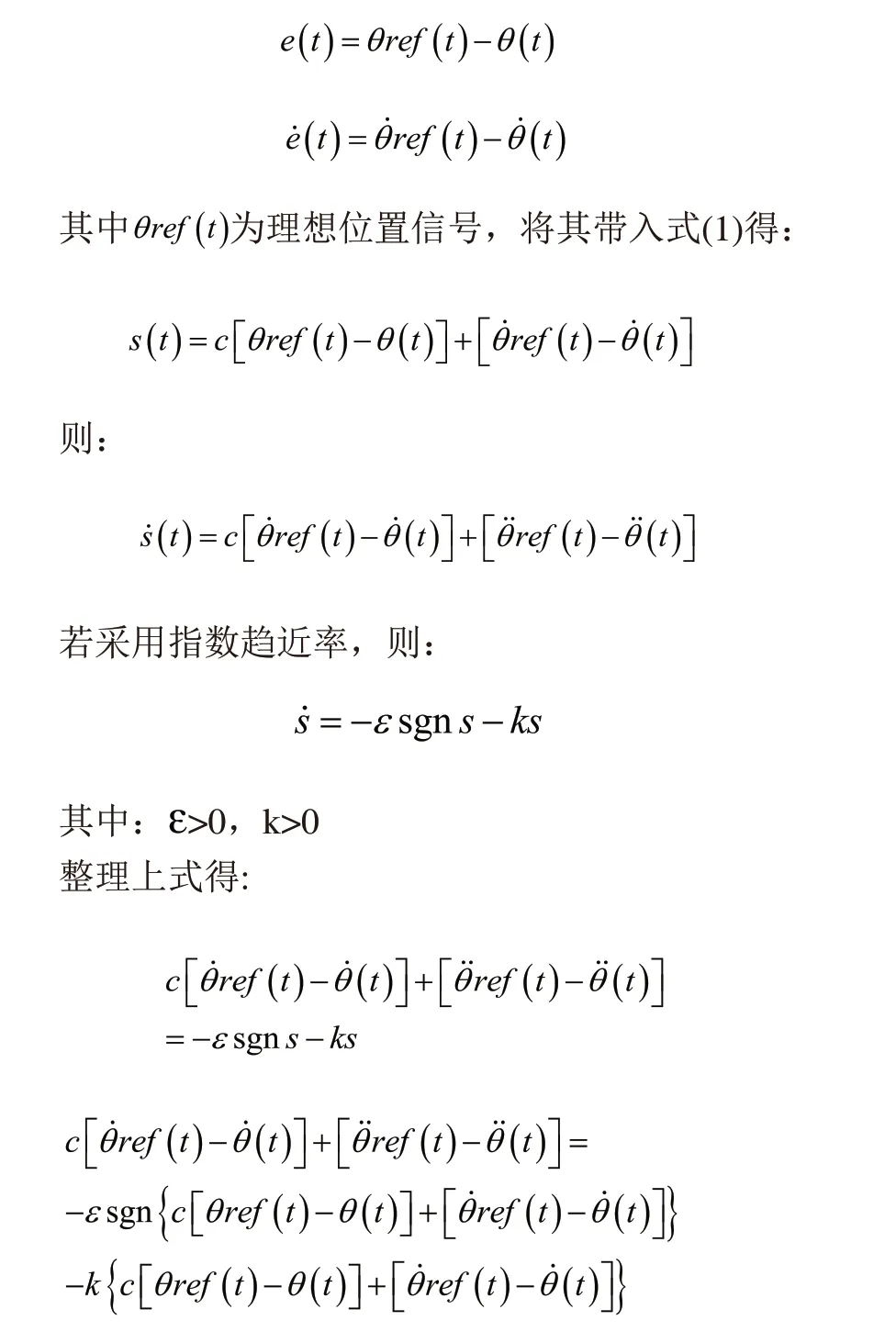
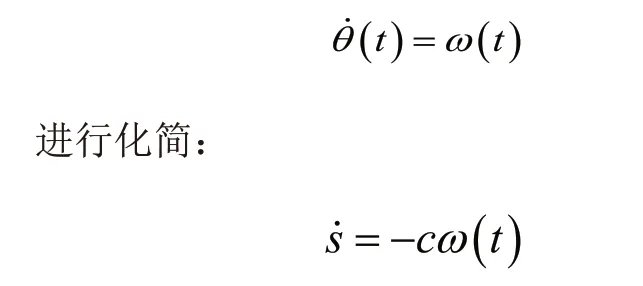
電機(jī)為被控對(duì)象,設(shè)跟蹤誤差為控制量,控制對(duì)象的二階微分可作為微量干擾進(jìn)行忽略不計(jì),則:
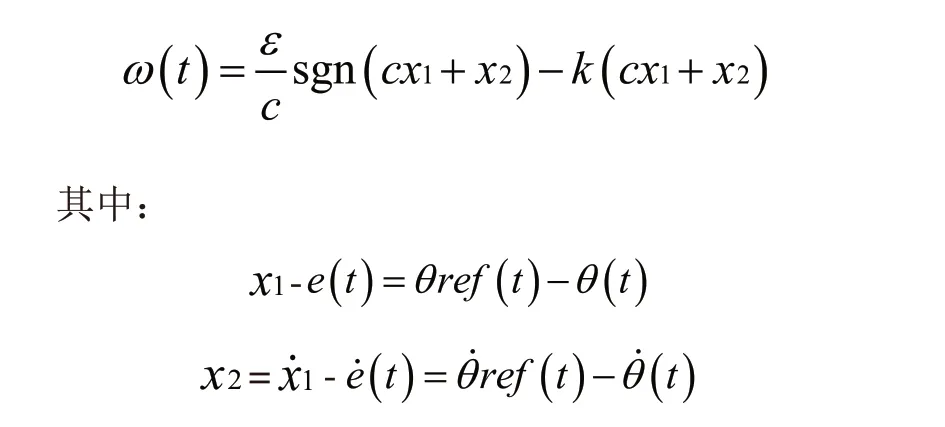
ω(t)為控制器輸入,則基于指數(shù)趨近率的滑膜控制器為:
2.2 仿真對(duì)比
利用Simulink對(duì)滑模指數(shù)趨近率進(jìn)行仿真,輸入信號(hào)為sin,驗(yàn)證指數(shù)趨近率滑模控制的位置跟蹤效果,搭建的Simulink滑模控制器如圖5所示。
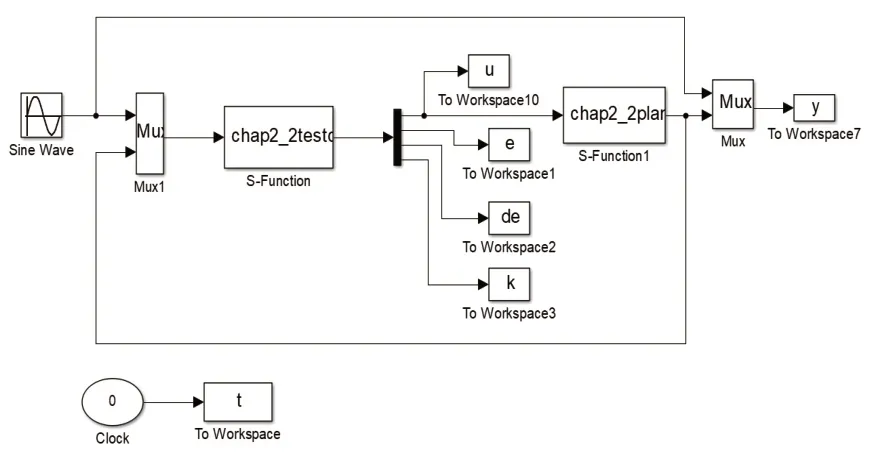
圖5 指數(shù)趨近率Simulink結(jié)構(gòu)圖
仿真結(jié)果如圖6所示。
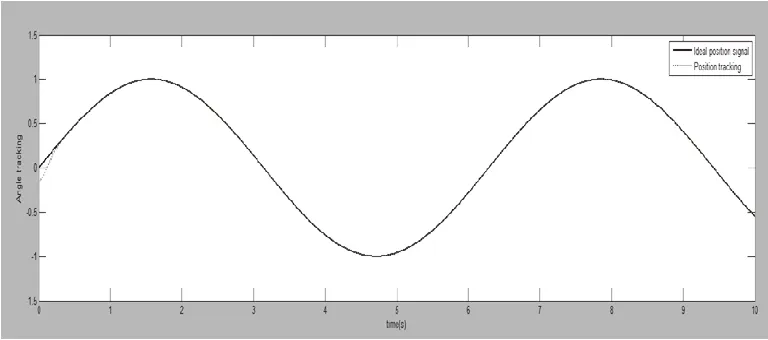
圖6 指數(shù)趨近率位置跟蹤
為產(chǎn)生對(duì)比,利用Simulink進(jìn)行搭載傳統(tǒng)PID的仿真,生成位置跟蹤曲線,與滑模指數(shù)趨近率進(jìn)行對(duì)比,說(shuō)明方法之間的優(yōu)劣性,同樣輸入sin信號(hào),傳統(tǒng)PID的仿真結(jié)構(gòu)圖如圖7所示。
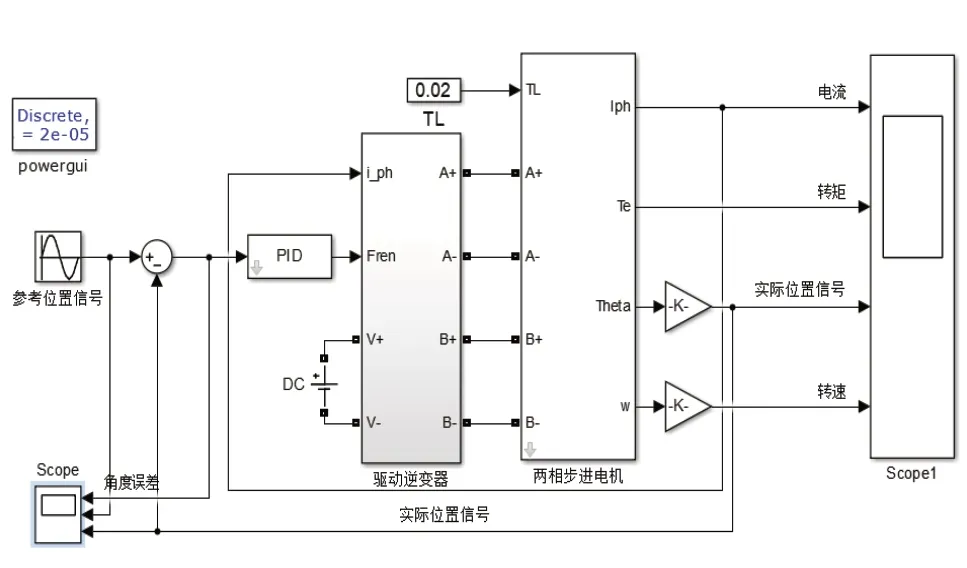
圖7 傳統(tǒng)PID的Simulink結(jié)構(gòu)圖
仿真結(jié)果如圖8所示。
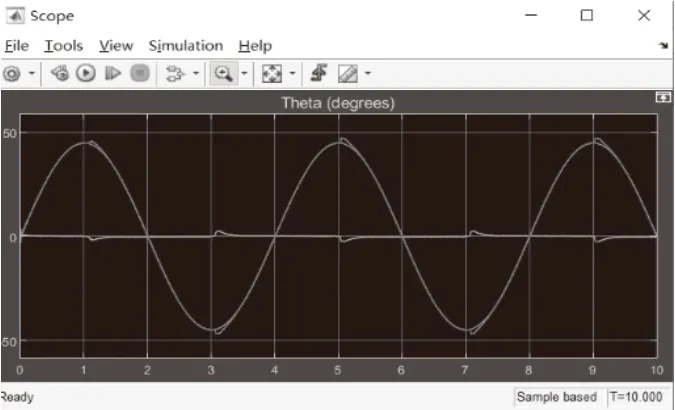
圖8 傳統(tǒng)PID位置跟蹤曲線
通過(guò)圖5與圖7的對(duì)比可以得出基于指數(shù)趨近率的滑模控制效果比傳統(tǒng)的PID效果要好,滑模指數(shù)趨近率控制在開始波動(dòng)之后跟蹤效果較好,后續(xù)誤差很小,而傳統(tǒng)的PID對(duì)位置跟蹤每一階段都會(huì)有一次波動(dòng),嚴(yán)重影響后續(xù)控制精度。
3 仿真模型的搭建與結(jié)果分析
3.1 仿真模型搭建
設(shè)按照第1節(jié)中的方法,利用激光干涉器對(duì)本結(jié)構(gòu)步進(jìn)絲杠結(jié)構(gòu)進(jìn)行有限次的測(cè)量得到的數(shù)據(jù)如表1所示。
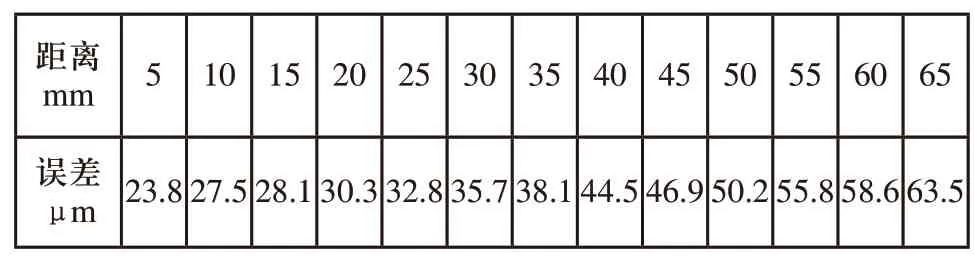
表1 Z軸部分測(cè)量定位誤差
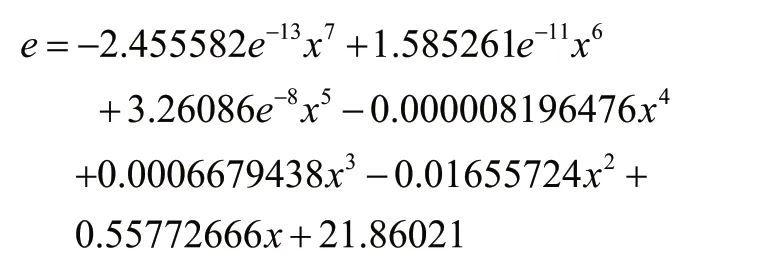
利用7次多項(xiàng)式進(jìn)行擬合得到的誤差數(shù)學(xué)模型如式所示:
利用MATLAB中的Simulink模塊搭建搭建仿真模型,實(shí)現(xiàn)二項(xiàng)混合步進(jìn)電機(jī)的速度位置雙閉環(huán),在輸入時(shí)為了驗(yàn)證將在第2小節(jié)得到的靜態(tài)誤差滑模控制器,在輸入端添加一定的靜態(tài)誤差進(jìn)行驗(yàn)證。輸入端如圖9所示。
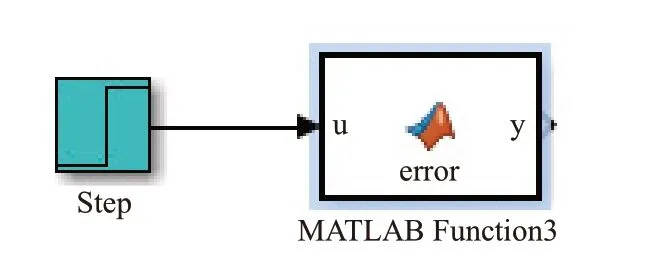
圖9 靜態(tài)補(bǔ)償輸入模塊
本文步進(jìn)電機(jī)為57系二相混合步進(jìn)電機(jī),其具體參數(shù)通過(guò)查閱相關(guān)手冊(cè)可知,如表2所示。
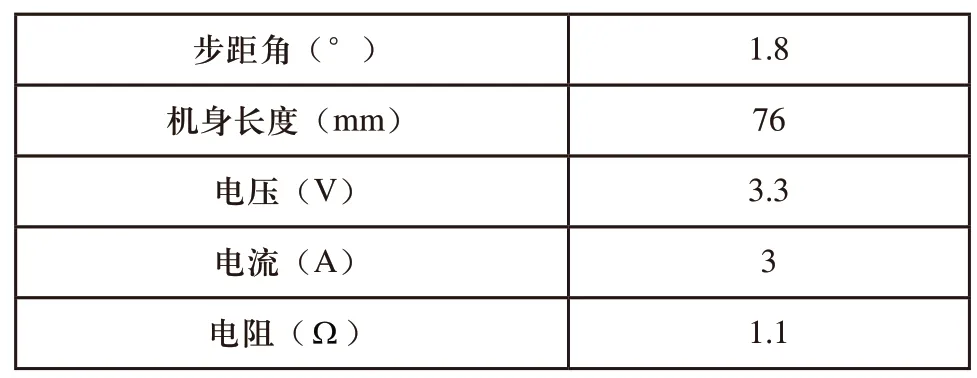
表2 57系步進(jìn)電機(jī)的參數(shù)

表2 (續(xù))
二項(xiàng)混合步進(jìn)電機(jī)的仿真模塊由機(jī)械模塊和電氣模塊組成,但是在Simulink的發(fā)展過(guò)程中,為了便于用戶的仿真和觀看,在現(xiàn)代的Simulink中提供了步進(jìn)電機(jī)和驅(qū)動(dòng)器的封裝模塊,如圖10所示。
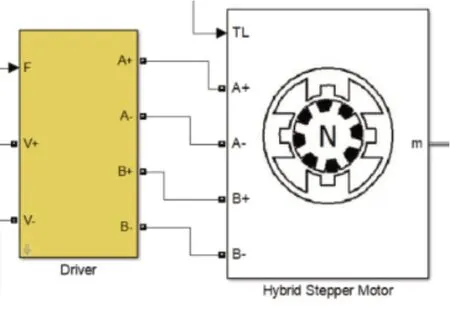
圖10 二項(xiàng)混合電機(jī)和驅(qū)動(dòng)模塊
3.2 仿真結(jié)果分析
選用的KK6005C-200A1-F0滾珠絲杠模組通過(guò)查詢手冊(cè),精度等級(jí)為P5,任意300mm行程內(nèi)變動(dòng)量為0.023mm。將其作為最大靜態(tài)誤差進(jìn)行代入。為驗(yàn)證靜態(tài)誤差模型的補(bǔ)償效果,有無(wú)靜態(tài)誤差模型各仿真一次,進(jìn)行比較。
Simulink搭建如圖11所示,輸入步進(jìn)電機(jī)的各項(xiàng)參數(shù),設(shè)仿真時(shí)間為0.5秒,電機(jī)最終位置為30,所得到的位移和誤差變化曲線如圖12所示。仿真結(jié)果如圖11所示。
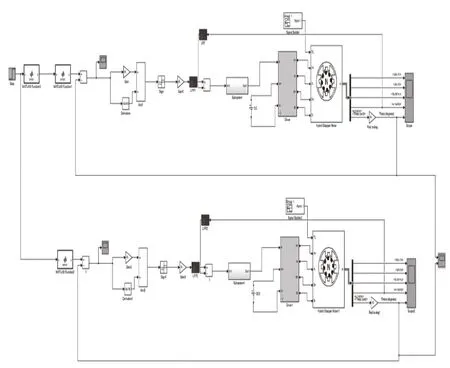
圖11 仿真結(jié)構(gòu)圖
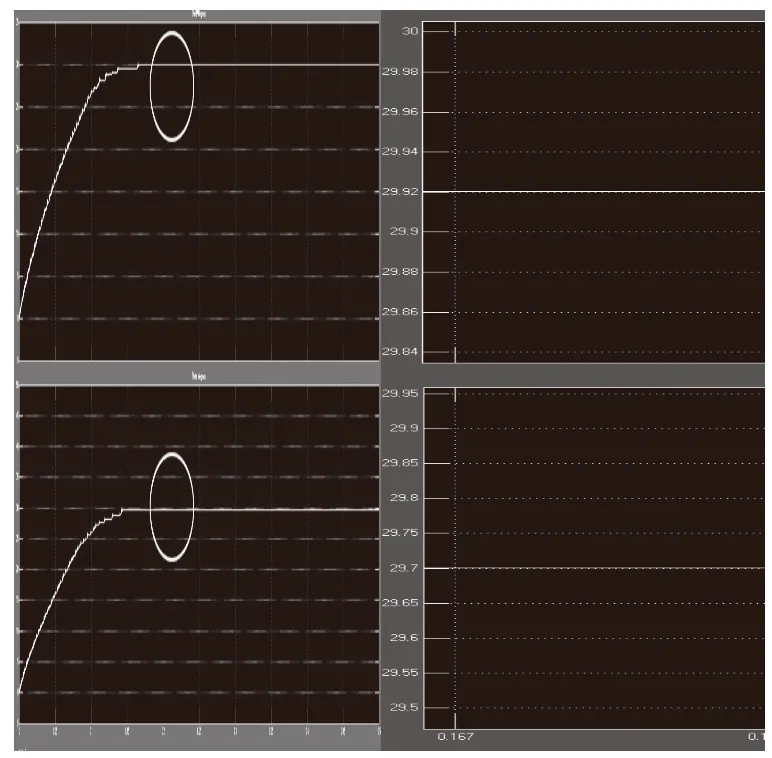
圖12 位移變化曲線
從圖12可以看出,在添加靜態(tài)誤差補(bǔ)償之后,上方的曲線明顯比下方無(wú)靜態(tài)誤差補(bǔ)償?shù)那€更貼近最終位置,達(dá)到了提高定位精度的目的,同時(shí)也驗(yàn)證了該方法的可行性。
4 結(jié)語(yǔ)
本文通過(guò)對(duì)自主搭建的點(diǎn)激光位移傳感器的電機(jī)絲杠運(yùn)動(dòng)結(jié)構(gòu)產(chǎn)生靜態(tài)誤差的可能進(jìn)行分析,經(jīng)過(guò)有限次的測(cè)量進(jìn)行靜態(tài)誤差的數(shù)學(xué)建模,在輸入端進(jìn)行補(bǔ)償,已達(dá)到消除靜態(tài)誤差的目的,利用滑膜的特性去抵抗動(dòng)態(tài)誤差;用MATLAB搭建數(shù)學(xué)模型和利用Simulink的封裝功能進(jìn)行封裝,將兩者結(jié)合進(jìn)行二項(xiàng)混合步進(jìn)電機(jī)的仿真,同時(shí)對(duì)仿真的結(jié)果進(jìn)行分析,去驗(yàn)證方法的正確性,和理論的可行性,對(duì)后人進(jìn)行激光測(cè)量平臺(tái)的搭建中二項(xiàng)混合步進(jìn)電機(jī)的控制或靜態(tài)誤差補(bǔ)償?shù)难芯烤哂幸欢ǖ慕梃b意義。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
