交流異步伺服技術在風電機組變槳系統開發中的應用
2021-01-23 07:59:50潘天賜
通信電源技術 2020年19期
潘天賜
(桂林理工大學博文管理學院,廣西 桂林 532100)
0 引 言
1 風電機組變槳系統結構及作業原理
風電機組變槳系統主要由6個模塊組成,分別是傳感器信息采集模塊、減速箱控制模塊、系統備用電源模塊、伺服系統、系統配電模塊及變槳主控制器。其中,伺服系統又可以拆分為傳感器、伺服電機、伺服驅動器三部分。
風電機組每個漿葉在伺服控制系統作用下,漿距角變化速度得以控制,通常每個槳葉每秒鐘變化角度在10°以內,0°~92°均能夠得到有效控制[5]。為了實現獨立作業,系統采用伺服電機單獨對各個槳葉采取獨立調節,利用編碼器反饋電機轉角結果,在伺服驅動器控制下,實現槳葉轉動閉環控制。當電機減速箱線路得以連接時,槳葉輪轂內齒圈隨著主動齒輪的轉動而轉動,在前者所處位置安裝位置開關,實現電機作業狀態實時控制。
2 適用于風電機組變槳系統控制的伺服系統選取
伺服系統是風電機組變槳系統控制的核心部分。由于風電機組變槳操控要求較高,除了要求伺服系統具有較強的環境適應能力,還要求系統作業期間定子與轉子均發熱,具有較高的作業效率,盡可能簡化系統結構,以便結構優化也檢修等工作開展。為了選取一種適合風電機組變槳系統開發的伺服系統,本文選取3種伺服系統對比其性能,結果如表1所示。
對比表1中的8項指標可知,異步交流伺服電機的性能更佳,雖然制動控制方面存在一定難度,但是其他指標較其它兩種伺服系統優勢更大。因此,本研究選取異步交流伺服電機作為系統開發核心工具。
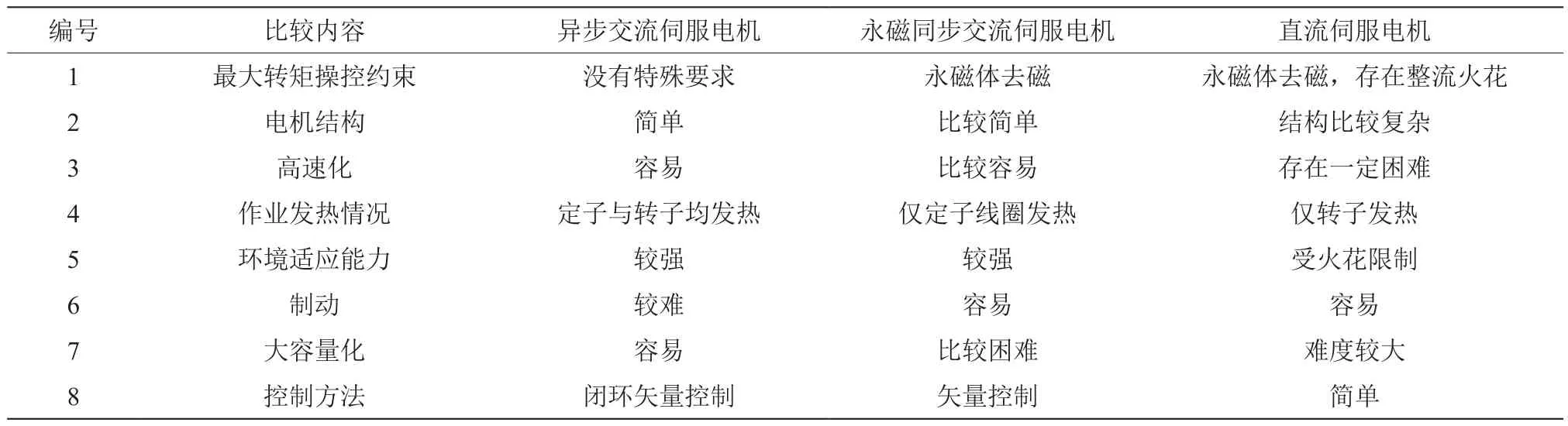
表1 3種伺服系統對比選取
3 伺服技術在風電機組變槳系統開發中的應用功能分析
伺服技術具有較為豐富的控制功能,支持多類型系統開發,交流異步電機伺服系統作為新型伺服技術,在風機組變槳系統中的應用,可以發揮獨特作用,主要實現功能如下。
(1)支持電流環、速度環、位置環同時控制,依據風電控制相關參數運算結果,下發系統位置控制指令,用于調整槳葉作業位置,使得系統操控更加精準。
(2)伺服系統可以接收冗余編碼器信號,利用編碼器對變槳伺服采取控制,實現閉環作業。為了進一步提高編碼器測量數據精準度,提升閉環作業操作水平,伺服系統結構中添加了位置編碼器,用于測量絕對位置,為系統操控提供精準數據。
(3)支持系統自診,通過發出狀態信號,與機組安全鏈建立連接,當發現系統作業異常時,立即中斷系統供電裝置,從而快速停機,在伺服電機的作用下自行診斷系統,挖掘系統作業問題,面對不同種情況生成相應的處理策略。
“秦月”由“秦富1號”和“嘎拉”雜交育成。果實呈圓形或長圓錐形,大小均勻,果個與嘎拉接近,果皮鮮紅,果肉黃白,肉質細脆多汁,酸甜適口,較耐貯存。在渭北高原南部地區8月底成熟,渭北高原中部地區9月上中旬成熟,剛好趕上中秋節和國慶節,是一個優良的中熟蘋果新品種。
(4)具備長期連續作業功能。為了避免系統遭受環境等因素影響,供電模塊作業異常無法正常為系統供電,伺服系統增加了備用電源,在主電源作業異常情況下接入電路。
4 基于交流異步伺服技術的系統硬件開發
4.1 伺服驅動框架結構設計
伺服驅動器是系統的核心控制裝置。本文在開發系統時,著重探究了伺服控制硬件框架結構。本研究選取TMS320F812作為核心處理器,利用模擬信號檢測裝置采集信號,在多功能控制器及驅動器作用下完成伺服驅動控制。圖1為伺服驅動框架結構設計方案。
圖1中,伺服驅動框架結構主要由模擬信號調理、參數存儲、轉速脈沖信號接口、位置反饋信號接口、中斷接口、電源監控、光電隔離、I/O端子、通信接口、泄放控制及驅動隔離電路等裝置構成。系統利用通信接口檢測信號,當系統檢測到模擬信號以后,自動對信號進行調理,經過泄放控制將信號傳輸至功率主回路,經過驅動隔離處理實現系統作業功率控制。
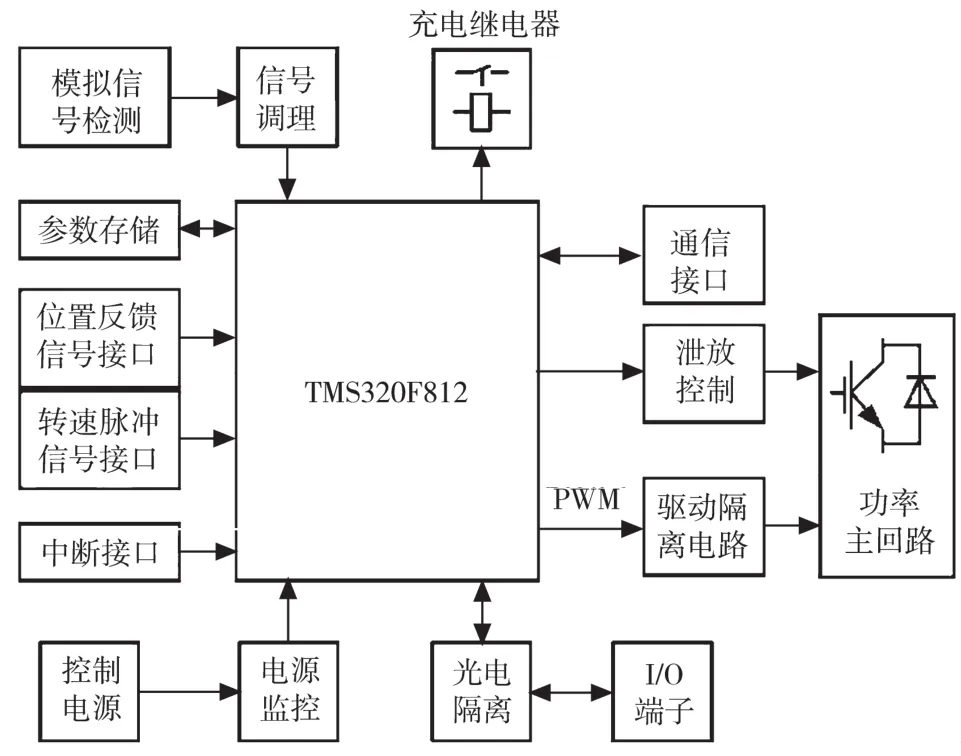
圖1 伺服驅動框架結構
4.2 系統作業安全硬件設計
為了提高系統作業安全性,本研究在系統硬件結構開發層面上進行了探究,通過設置監控、復位等裝置,達到保護系統安全運行的目的。本系統主要設置了兩部分安全硬件結構,其中一部分為電源監控硬件結構,通過觀察DO電平變化數值,判斷機組作業是否安全;另一部分為看門狗保護,可在伺服驅動器死機情況下起到保護作用。當伺服電機從正常作業轉變為死機狀態時,看門狗自動復位,檢測到DO狀態為低電平,此情況下機組恢復到安全狀態。
5 基于交流異步伺服技術的系統軟件開發
5.1 異步電機內環控制開發
本研究依據電機轉矩控制方程和轉子磁鏈方程,構建動態作業原理下的異步電機作業模型,利用轉子磁場定向矢量控制方法設計內環控制結構,如圖2所示。

圖2 異步電機內環控制結構
圖2中,電機作業產生信號經過編碼器處理,生成具有編碼的信號,利用測量裝置采集位置信號和速度信號數據,傳送至PI端,經過一系列的內環控制處理,完成PWM逆變換,而后變換坐標,利用動態模型進行計算。根據動態計算結果,對磁場內異步電機矢量進行有效控制。關于矢量控制的軟件結構,主要由位置、速度、電流三部分組成。
5.2 系統通信接口設置
本系統選取CAN通信協議作為通信接口設置工具,創建變槳距主控裝置和伺服驅動器之間通信橋梁,借助RS-232串行接口和RS-485串行接口傳輸信號。另外,系統數據信息的交換處理采用的技術為Modbus協議,按照此協議轉換數據信息。
5.3 系統異常作業狀態判斷及軟件控制
傳統的伺服系統安全性能薄弱,改善系統異常作業下的軟件控制體系顯得尤為重要,通過安全診斷,獲取伺服系統當前作業狀態信息,判斷其是否處于危險作業狀態,為系統修復處理提供更多時間。通常,將采集到的系統作業診斷結果匯總到DO通道內,而后經過繼電器轉入機組信息傳輸鏈路內,通過啟動伺服驅動器,對機組作業狀態進行調控。以下為兩種常見的伺服系統作業異常情況,通過分析異常情況特點,制定軟件控制方案。
(1)裝置嚴重損傷情況。此類情況描述的是伺服系統中某一裝置或者多個裝置在遭受嚴重創傷,出現電壓或者電流過高等情況,導致散熱板過熱、驅動裝置異常等問題產生。面對此問題采取的軟件控制:封鎖系統的脈寬調制輸出端,切斷接觸器,使得線路中電流為零,在DO端輸出低電平。當管理人員重新為系統上電,才可以連接接觸器,恢復正常作業。
(2)編碼器發生故障。此類故障描述的是槳距角、電機編碼器斷線,或者編碼器位置差數值過大,均會導致其作業異常。面對此情況,通過控制伺服狀態,使其輸出低電平。另外,還可以將順漿動作控制模式設置為VVVF模式,采取緊急狀態切斷。
6 系統作業常見的故障及處理建議
由于交流伺服驅動器在系統應用開發中存在系統維護簡便、開發難度低等優勢,因此成為了風電機組變槳系統開發的首要選擇工具。隨著風力發電科學技術水平的提升,對順漿控制要求有所提升,當前擬定的控制模式仍然存在漏洞,如主電源供電異常等問題。本文以此問題為例來分析系統作業故障,提出處理建議。
本系統通過設置備用電源繼續為系統供電,通常選取超級電容組或者蓄電池組作為電源裝置,借助逆變器完成順漿操作,但降低了順漿作業性能。所以,提升系統順漿作業性能成為了發揮系統作用的關鍵,可以采取如下兩種方案改善此類性能。
(1)為系統配備1臺輔助裝置,通過控制系統作業頻率及時調節系統作業環境,從而避免伺服器發生故障。此項操作使用到的裝置為變頻器,當檢測到伺服器發生故障時,利用該裝置控制交流電機,使得槳葉從當前作業狀態立即轉變為順漿狀態。
(2)在伺服控制器現有功能基礎上增加冗余控制功能。該項操作功能指的是借助相鄰槳葉作業能量,帶動與其相鄰且處于故障狀態下的槳葉立即完成順漿動作,使得驅動器得以恢復到正常作業狀態。
7 結 論
本文圍繞風電機組變槳系統開發方案展開研究,選取交流異步伺服技術作為核心技術,設計系統框架結構。該設計方案以伺服驅動器作為重點,擬定了硬件結構設計方案和軟件開發方案。此外,針對系統作業期間可能發生的故障進行分析,提出了處理建議。加深了對交流伺服器控制的探究,有助于為風電機組變槳控制策略研究提供參考依據。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08