基于STM32的捷聯(lián)慣導(dǎo)系統(tǒng)軟硬件設(shè)計(jì)
2021-01-23 08:05:18任曉峰
通信電源技術(shù) 2020年19期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
任曉峰
(北京星網(wǎng)宇達(dá)科技股份有限公司,北京 100176)
0 引 言
本飛行姿態(tài)控制系統(tǒng)的慣性導(dǎo)航系統(tǒng)的陀螺儀、加速度計(jì)采用MEMS陀螺儀、MEMS加速度計(jì)。此設(shè)計(jì)慣性導(dǎo)航系統(tǒng)在經(jīng)濟(jì)成本、設(shè)備體積大小、設(shè)備的質(zhì)量大小方面更具有優(yōu)勢(shì),被廣泛地應(yīng)用在軍事、民用的多個(gè)方面[1]。陀螺儀主要是用來(lái)測(cè)量幾個(gè)方位的角速率的大小;加速度計(jì)主要用來(lái)計(jì)算和測(cè)量慣性導(dǎo)航系統(tǒng)及相關(guān)載體之間存在的引力加速度、絕對(duì)加速度。然后通過(guò)相關(guān)的傳感器將測(cè)得這幾項(xiàng)數(shù)據(jù)指標(biāo)發(fā)送到處理器中進(jìn)行處理。
1 發(fā)展過(guò)程與國(guó)內(nèi)外現(xiàn)狀
1.1 發(fā)展過(guò)程與國(guó)外現(xiàn)狀
慣性導(dǎo)航屬于一種先進(jìn)的科學(xué)技術(shù),20世紀(jì)才逐漸開始發(fā)展,最早出現(xiàn)在德國(guó)。當(dāng)時(shí)德國(guó)科學(xué)家通過(guò)陀螺儀與加速器來(lái)設(shè)計(jì)火箭當(dāng)中的慣性系統(tǒng),用于火箭的定位。二戰(zhàn)后,美國(guó)與蘇聯(lián)也開始發(fā)展慣性技術(shù),并且用于制造軍事武器,從而推動(dòng)了慣性技術(shù)在軍事現(xiàn)代化中的發(fā)展,被應(yīng)用在飛機(jī)、導(dǎo)彈、艦船中,促進(jìn)了它們的高速發(fā)展與運(yùn)用。20世紀(jì)50年代初期,美國(guó)研發(fā)出了具有穩(wěn)定性的三軸陀螺慣性導(dǎo)航系統(tǒng),進(jìn)一步將導(dǎo)航技術(shù)推向新的臺(tái)階。接著20世紀(jì)50年代至20世紀(jì)60年代,慣性導(dǎo)航系統(tǒng)已經(jīng)被廣泛應(yīng)用在火箭發(fā)射、導(dǎo)彈、宇宙飛行器定位、艦船航行、測(cè)繪等領(lǐng)域。進(jìn)入20世紀(jì)80年代,慣性導(dǎo)航系統(tǒng)開始融入在計(jì)算機(jī)控制技術(shù)中,并且推動(dòng)了數(shù)學(xué)平臺(tái)的發(fā)展。20世紀(jì)90年代后,慣性導(dǎo)航系統(tǒng)開始被應(yīng)用在各種運(yùn)載體中。
計(jì)算機(jī)系統(tǒng)、電子線路、慣性儀表及各種精密機(jī)械儀器等的不斷發(fā)展與改進(jìn),各種繁雜技術(shù)、矯正技術(shù)等的軟件得以完善,進(jìn)一步加大了慣性導(dǎo)航系統(tǒng)的運(yùn)用,提高了其精度與可靠度。慣性導(dǎo)航系統(tǒng)現(xiàn)已在艦艇、潛艇、戰(zhàn)機(jī)、戰(zhàn)車、導(dǎo)彈以及人造衛(wèi)星等各個(gè)領(lǐng)域中被廣泛應(yīng)用,并且隨著經(jīng)濟(jì)成本降低以及技術(shù)的普及,各式各樣的飛機(jī)、機(jī)器人、檢測(cè)設(shè)備等都對(duì)其要求更高。
近年來(lái),雖然無(wú)線電導(dǎo)航、天文導(dǎo)航及衛(wèi)星導(dǎo)航等技術(shù)不斷地發(fā)展,但是依然取代不了慣性導(dǎo)航系統(tǒng)所特有的作用與特點(diǎn)。尤其對(duì)于軍事領(lǐng)域,慣性導(dǎo)航系統(tǒng)始終處于主導(dǎo)地位。因此,慣性導(dǎo)航系統(tǒng)的性能會(huì)發(fā)展得越來(lái)越好,結(jié)構(gòu)會(huì)更加優(yōu)化。
1.2 國(guó)內(nèi)現(xiàn)狀
20世紀(jì)50年代以來(lái),我們國(guó)家開始逐漸研發(fā)慣性相關(guān)的儀表,到目前已經(jīng)完成了導(dǎo)彈、衛(wèi)星等慣性導(dǎo)航系統(tǒng),并且已經(jīng)投入了生產(chǎn)。運(yùn)載火箭的成功發(fā)射,標(biāo)志著我國(guó)慣性技術(shù)的發(fā)展已經(jīng)有了一定的水平,具備了自主設(shè)計(jì)、研發(fā)、生產(chǎn)的能力。但是,與發(fā)達(dá)國(guó)家相比,我國(guó)的慣性導(dǎo)航技術(shù)與規(guī)模都還有很遠(yuǎn)的距離,需要科研人員迎難而上,取得更大的進(jìn)步。
2 主要組成元件
不同的慣性導(dǎo)航系統(tǒng)的組成存在一定的差異,而且同一類型的導(dǎo)航系統(tǒng)如果運(yùn)載體不同,那么慣性導(dǎo)航系統(tǒng)的組成也會(huì)不同。本文以STM32平臺(tái)為基礎(chǔ),設(shè)計(jì)出了一種用來(lái)監(jiān)測(cè)體姿態(tài)的慣性導(dǎo)航系統(tǒng)。慣性導(dǎo)航系統(tǒng)的硬件組成包括陀螺儀、加速度計(jì)、采集與解算單元、電源單元及對(duì)外交互單元。
2.1 陀螺儀
本設(shè)計(jì)選用的是MEMS陀螺儀,實(shí)現(xiàn)測(cè)量載體的運(yùn)動(dòng)角速度。MEMS陀螺儀選用的是芯動(dòng)聯(lián)科的MGZ206XHC,此器件的對(duì)外通信接口為4線全雙工SPI總線,陀螺儀作為SPI總線從設(shè)備。陀螺儀需要5 V數(shù)字電源、5 V模擬電源和3.3 V接口I/O電源三路電源供電。STM32通過(guò)物理層SPI總線實(shí)現(xiàn)數(shù)據(jù)讀取,首先讀取data_ready寄存器,當(dāng)data_ready有效后,讀取角速度數(shù)據(jù)和溫度數(shù)據(jù)。數(shù)據(jù)讀取頻率可以達(dá)到2 000 Hz,滿足設(shè)計(jì)需求。
2.2 加速度計(jì)
本設(shè)計(jì)選用的是MEMS加速度計(jì)為芯動(dòng)聯(lián)科的MAX535LC,此加速度計(jì)的測(cè)量范圍為±30 g,零偏重復(fù)性小于5 mg。加速度計(jì)內(nèi)部集成了高精度模數(shù)轉(zhuǎn)換器,使得器件的分辨率達(dá)到0.004 mg。外部接口亦是SPI接口。數(shù)據(jù)讀取的流程類似于上述陀螺儀的讀取工程。數(shù)據(jù)讀取頻率同樣可以達(dá)到2 000 Hz,滿足設(shè)計(jì)需求。
2.3 采集與解算單元
慣性器件的采集單元負(fù)責(zé)完成原始數(shù)據(jù)的實(shí)時(shí)讀取和實(shí)時(shí)解包解算,本設(shè)計(jì)的采集頻率為1 000 Hz,由主控器STM32通過(guò)兩路SPI接口采集慣性數(shù)據(jù)。其中一路SPI接口負(fù)責(zé)順序采集3軸陀螺儀的角速度信息,另一路SPI接口負(fù)責(zé)順序采集3軸加速度計(jì)的加速度信息。STM32將收到的數(shù)據(jù)解包解算出慣性信息和溫度信息,再將數(shù)據(jù)按照協(xié)議要求打包送到導(dǎo)航解算系統(tǒng)。導(dǎo)航解算單元主要基于慣性器件的采集系統(tǒng),對(duì)慣性數(shù)據(jù)進(jìn)行補(bǔ)償運(yùn)算和捷聯(lián)運(yùn)算,輸出角速度、加速度、姿態(tài)、速度及位置等信息。
2.4 電源單元
選用隔離式DC-DC模塊,內(nèi)部集成了輸出短路、輸出過(guò)流自恢復(fù)保護(hù)電路,2 000 V的隔離耐壓具有較寬的電壓輸入范圍9~36 V,滿足大部分供電標(biāo)準(zhǔn)。工作溫度范圍為-40~85 ℃,全溫的轉(zhuǎn)換效率達(dá)到85%以上。使用EMI電源濾波器,降低電磁干擾,同時(shí)電路上選用肖特基二極管和TVS二極管(P4SMA36CA),用來(lái)應(yīng)對(duì)供電錯(cuò)接和瞬態(tài)突波。此外,采用按照標(biāo)準(zhǔn)設(shè)計(jì)的EMC電路,將電磁兼容性的影響降到最低。圖1為隔離電源原理框圖。
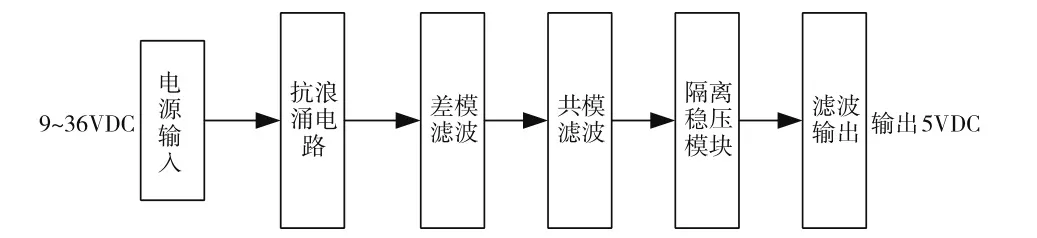
圖1 隔離電源原理框圖
2.5 對(duì)外交互單元
數(shù)字通信接口均采用隔離式設(shè)計(jì),通過(guò)隔離式電源模塊將內(nèi)部數(shù)字地與外部隔離地隔離開。同時(shí)采用TI公司高速隔離芯片,轉(zhuǎn)換速率高達(dá)10 Mb/s,芯片隔離內(nèi)部采用3.3 V供電,隔離外部采用5 V供電。在通信接口就近接入ESD防護(hù)器件,防止接口靜電對(duì)系統(tǒng)的影響。
3 工作原理與數(shù)學(xué)建模
3.1 工作原理
慣性導(dǎo)航技術(shù)屬于先進(jìn)的一種導(dǎo)航方法,采用運(yùn)載體的加速度來(lái)執(zhí)行導(dǎo)航任務(wù)。由慣性定律可知,采用陀螺儀與加速度計(jì)來(lái)測(cè)量STM32平臺(tái)載體的慣性信息,然后按照積分運(yùn)算來(lái)獲得導(dǎo)航的速度與位置[2]。
3.2 數(shù)學(xué)建模
3.2.1 坐標(biāo)系的建立
(1)地理坐標(biāo)系的建立
建立oxyz的地理坐標(biāo)系,以地球表面為原點(diǎn)o,東方為x軸,北方為y軸,垂直向上為z軸。慣性導(dǎo)航系統(tǒng)在分析時(shí)使用最多的坐標(biāo)系就是地理坐標(biāo)系,隨著地球的轉(zhuǎn)動(dòng)、運(yùn)載體的運(yùn)動(dòng)而進(jìn)行運(yùn)動(dòng)。
(2)平臺(tái)坐標(biāo)系的建立
建立oxGyGzG的平臺(tái)坐標(biāo)系,將陀螺儀、加速度計(jì)安裝到基于STM32平臺(tái)的姿態(tài)監(jiān)測(cè)系統(tǒng)中。zp軸與STM32的平臺(tái)平面垂直,平臺(tái)北面是yp軸,平臺(tái)東面是xp軸。地理坐標(biāo)系oxyz與平臺(tái)坐標(biāo)系oxpypzp之間的夾角記為α、β、γ[3]。
(3)陀螺坐標(biāo)系的建立
建立oxGyGzG的陀螺坐標(biāo)系,不計(jì)算回路中的誤差和陀螺的安裝誤差的情況下,陀螺坐標(biāo)系與平臺(tái)坐標(biāo)系會(huì)發(fā)生重合,所以在具體的分析過(guò)程中,可采用平臺(tái)坐標(biāo)系來(lái)代替陀螺坐標(biāo)系。
3.2.2 數(shù)學(xué)模型
為了降低計(jì)算機(jī)程序的復(fù)雜程度以及轉(zhuǎn)換慣性導(dǎo)航系統(tǒng)的工作狀態(tài),需要將慣性系統(tǒng)的各種工作狀態(tài)用數(shù)學(xué)模型進(jìn)行表示,從而用一組程序方程式就能對(duì)慣性導(dǎo)航系統(tǒng)的工作狀態(tài)進(jìn)行轉(zhuǎn)換。因此,建立統(tǒng)一的數(shù)學(xué)模型有利于對(duì)慣性系統(tǒng)的進(jìn)一步研究,也有利于在程序上進(jìn)行調(diào)試和運(yùn)用。通過(guò)切實(shí)可行的數(shù)學(xué)模型在一定程度上減少了計(jì)算機(jī)的內(nèi)存單元,使得設(shè)備更加簡(jiǎn)潔、易操作。
4 仿真實(shí)驗(yàn)與誤差
4.1 仿真實(shí)驗(yàn)
對(duì)慣性導(dǎo)航系統(tǒng)進(jìn)行模擬仿真一方面是在計(jì)算機(jī)上根據(jù)慣性導(dǎo)航系統(tǒng)的工作原理、特性、誤差、參數(shù)等來(lái)進(jìn)行選擇,另一方面是通過(guò)慣性導(dǎo)航系統(tǒng)來(lái)控制計(jì)算機(jī),從而進(jìn)行仿真。后一種方式包括對(duì)參數(shù)進(jìn)行調(diào)整、對(duì)程序進(jìn)行驗(yàn)證和測(cè)試。這兩種模擬仿真方式都是將數(shù)學(xué)模型運(yùn)用在計(jì)算機(jī)上來(lái)實(shí)現(xiàn)結(jié)果,所以要將數(shù)學(xué)模式和計(jì)算機(jī)進(jìn)行結(jié)合使用。
4.2 誤差分析
慣性導(dǎo)航系統(tǒng)比較復(fù)雜,所以容易產(chǎn)生誤差的地方也比較多。對(duì)慣性導(dǎo)航系統(tǒng)進(jìn)行誤差分析,也即是對(duì)系統(tǒng)中涉及到的各個(gè)參數(shù)進(jìn)行分析。在本次實(shí)驗(yàn)研究中所涉及到的誤差來(lái)源包括陀螺漂移、加速度計(jì)以及其他的一些誤差,按照誤差的來(lái)源性質(zhì)可以分為如下5種。
(1)慣性元件帶來(lái)的誤差。慣性導(dǎo)航系統(tǒng)的主要慣性元件包括陀螺儀、加速度計(jì)及磁羅盤。其中,陀螺儀可能造成的誤差包括漂移、力矩的標(biāo)度[4];加速度計(jì)可能造成的誤差包括零位、標(biāo)度因素等。
(2)安裝過(guò)程中造成的誤差。平臺(tái)在安裝時(shí)的三環(huán)框的垂直度可能造成的誤差。
(3)初始值的設(shè)置誤差。在安裝加速度計(jì)時(shí),由于加速度計(jì)測(cè)量的是平臺(tái)方向的加速度,如果剛開始的平臺(tái)初始角度與計(jì)劃的不相符,也會(huì)導(dǎo)致慣性系統(tǒng)本身的一個(gè)誤差。
(4)系統(tǒng)原理與計(jì)算方法造成的誤差。在慣性系統(tǒng)的數(shù)學(xué)建模過(guò)程中,所涉及到的各種運(yùn)算公式以及在計(jì)算機(jī)中的算法和運(yùn)算都可能帶來(lái)誤差。
(5)外界信息所造成的誤差。慣性系統(tǒng)在工作狀態(tài)轉(zhuǎn)換的過(guò)程中,由于設(shè)備的信息問(wèn)題而導(dǎo)致在測(cè)量過(guò)程中所產(chǎn)生的誤差,也會(huì)使得慣性系統(tǒng)產(chǎn)生誤差。
5 系統(tǒng)的軟件設(shè)計(jì)
對(duì)于計(jì)算機(jī)控制系統(tǒng),相關(guān)的硬件結(jié)構(gòu)與配置非常重要,但更重要的是軟件設(shè)計(jì)與程序開發(fā)的技術(shù)。慣性導(dǎo)航系統(tǒng)必須采取微處理器來(lái)監(jiān)視整個(gè)運(yùn)行的環(huán)境與運(yùn)用的導(dǎo)航設(shè)備,對(duì)各種事件進(jìn)行及時(shí)而準(zhǔn)確地響應(yīng)。按照慣性導(dǎo)航系統(tǒng)所需要的功能來(lái)設(shè)計(jì)軟件系統(tǒng),主要包括3個(gè)方面。
第一,軟件系統(tǒng)的接口。軟件系統(tǒng)的接口模塊是實(shí)現(xiàn)硬件數(shù)據(jù)流的輸入輸出,從采集信號(hào)、數(shù)據(jù)解包到數(shù)據(jù)傳輸,并且實(shí)現(xiàn)慣性導(dǎo)航系統(tǒng)的數(shù)據(jù)的對(duì)外輸出等。
第二,軟件系統(tǒng)的計(jì)算。慣性導(dǎo)航系統(tǒng)的運(yùn)算主要包括慣性導(dǎo)航系統(tǒng)工作狀態(tài)時(shí)的測(cè)量、漂移、定標(biāo)、初始對(duì)準(zhǔn)等,從而實(shí)現(xiàn)定位功能。
第三,軟件系統(tǒng)的交互設(shè)置。系統(tǒng)的交互是人與計(jì)算機(jī)之間的交互,包括導(dǎo)航系統(tǒng)的航向、速度,硬件設(shè)備的位置、速度、各項(xiàng)參數(shù)值、加速度、時(shí)間、加速度計(jì)的零位及陀螺儀的漂移參數(shù)等。此外,還可以設(shè)置與顯示相關(guān)的工作狀態(tài)、工作方式及工作切換等。
6 結(jié) 論
本文是基于STM32平臺(tái)來(lái)設(shè)計(jì)的一個(gè)監(jiān)測(cè)姿態(tài)的系統(tǒng),硬件部分核心部件包括陀螺儀、加速度計(jì)、采集與解算單元、電源單元和對(duì)外交互單元。在本次體姿態(tài)系統(tǒng)的慣性導(dǎo)航系統(tǒng)中使用的是MGZ206XHC的陀螺儀和MAX535LC的加速度計(jì)。
在設(shè)計(jì)之前,先闡述了姿態(tài)慣性導(dǎo)航系統(tǒng)的工作原理,然后通過(guò)數(shù)學(xué)建模來(lái)呈現(xiàn)慣性導(dǎo)航系統(tǒng)的各種工作狀態(tài),再通過(guò)仿真實(shí)驗(yàn)的方式將建立的數(shù)學(xué)模型運(yùn)用在STM32中進(jìn)行實(shí)現(xiàn),最后介紹了系統(tǒng)的軟件設(shè)計(jì)部分,實(shí)現(xiàn)導(dǎo)航數(shù)據(jù)運(yùn)算處理,將矯正后的數(shù)據(jù)發(fā)送到控制系統(tǒng)中來(lái)實(shí)現(xiàn)相關(guān)的控制與操作。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17