作戰空域智能劃設構想與實現*
2021-01-22 09:17:28蘇英振
火力與指揮控制 2020年12期
文 秘,蘇英振,文 婧,朱 益
(1.解放軍95905 部隊,遼寧 錦州 121018;2.空軍指揮學院指揮控制教研室,北京 100097;3.陸軍防化學院軍事理論教研室,北京 102205)
0 引言
空域是聯合作戰各參戰力量共用的一種核心資源[1],這種資源的價值體現,抓手在“管制”,基點在“劃設”。空域的劃設,是空域安全、高效使用的基礎。目前,在管制空域的劃設方面[2-3],民用航空積累了大量的數據和經驗,給空戰場管制空域的劃設提供了經驗和借鑒;但在作戰空域劃設方面[4],基本(仍)采用“人工”劃設的方法,與聯合作戰空戰場的大規模性、高對抗性、時間敏感性極其不相適應。特別是各種武器裝備和方法全維度地向智能化方向發展,智能化賦能作用凸顯,將智能化技術應用于作戰空域的劃設,提升劃設的質量和效益,具有重要理論和實踐價值。
作戰空域的劃設不同于一般管制和訓練空域劃設[5],具有以下特點:一是作戰空域的劃設與地面關鍵點信息構成相關關系,即作戰空域的劃設不依賴航路信息,而依賴于戰場關鍵點構成的態勢;二是作戰空域不是毫無意義的緊湊型,不必充滿整個戰場空域,空域之間允許有間隔甚至是重合。三是不同作戰空域,有其特定的劃設要求[6],如:空域位置、大小、形狀、角度等。作戰空域劃設的復雜性和難點不在于如何將所需作戰空域高效地填充于作戰空間,而在于如何確定各種作戰空域的參數(位置、方向、大小等)與戰場存在的某種特定關系。這種關系,將確定相應空域在不同位置的“效果”,通常這個過程都是在一定數據計算輔助的基礎上,由人在大腦中完成。本文采用神經網絡學習的方法,模擬人腦中作戰空域劃設決策過程,通過戰場關鍵點確定、戰場空間標準化、空域劃設學習及空域智能劃設4 個步驟,實現對作戰空域劃設的智能化輔助。
1 智能劃設構想
1.1 戰場關鍵點
戰場關鍵點是指在戰場中對作戰行動起到重要作用的“點”,包括點目標及面目標中心。關鍵點既有人工的也有自然的、既有我方的也有敵方的,甚至還有第三方的;它們通常在定位、目標、價值、威脅、通信、交通、指揮、集結及補給等方面起著不可替代的作用,如表1 所示[7]。
首先,戰場關鍵點能體現戰場態勢。各種戰場關鍵點,就如棋盤上具有不同功能的棋子,處在不同的位置,能最直觀地反映戰場態勢,其分布最直接的導致了戰場態勢圖的產生。正是這種對于戰場總體的考慮展現,使得指揮員能夠在頭腦中形成抽象的戰場認識,通過大腦創造性地加工,形成科學與藝術并存的主觀決策。
其次,戰場關鍵點決定了作戰方向及空戰場空域預先劃設。戰場關鍵點,涉及的敵方目標,對于進攻作戰而言,將決定進攻的方向,結合我方力量部署,將形成作戰方向線。作戰方向線及相關關鍵點相對位置關系,將決定各種作戰空域的位置和方向,這就是人工空域預先劃設的邏輯。
最后,關鍵點的變換、移動、消除是作戰過程的動態體現。作戰從某種程度上來說,就是要通過對關鍵點處理,造成態勢的變換,從而向著有利于己方的方向發展。因此,關鍵點的產生、變換、移動、消除是對戰場態勢變換的直接體現,以關鍵點的動態變化為前提,為基于關鍵點的智能空域動態劃設提供了依據和可能。
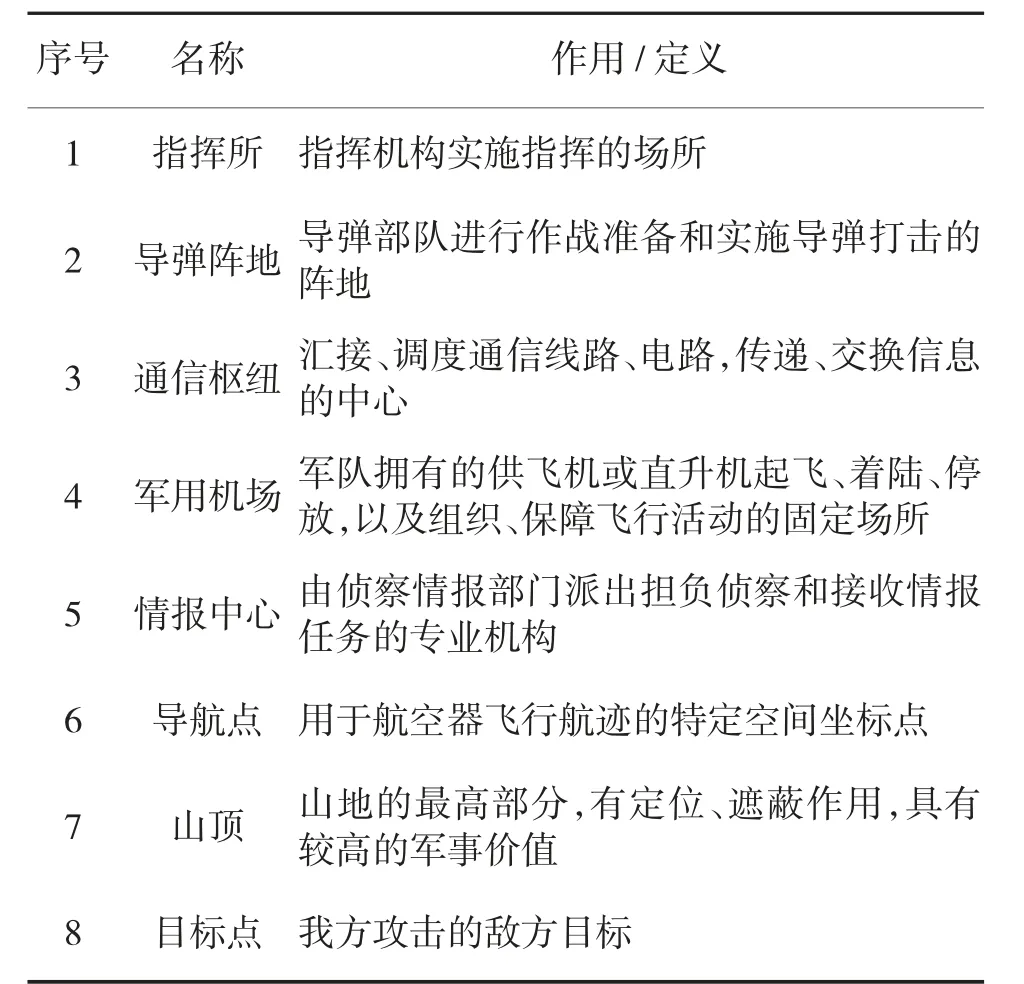
表1 部分戰場關鍵點及作用
1.2 智能劃設步驟
當前的作戰空域劃設方法,主要是基于定性評價的人工劃設,主要步驟見文獻[4],劃設的重點在于平衡各空域需求,以調整為主,效率較低。本文采用的作戰空域智能劃設方法,其流程如下頁圖1 所示,主要包括6 個步驟。
Step1:確定劃設需求。弄清需要劃設空域的種類、數量、相關利益方(陸、海、空等),確定空域劃設的優先級別,找到存在矛盾和沖突的部位,分析解決的方法和可能利益與風險。
Step2:展開空域研究。主要是弄清當前空域特點,統計當前空域內影響作戰的所有關鍵點,并弄清每種空域與哪些關鍵點存在相關關系。
Step3:智能輔助空域劃設。按照需求及優先級,逐步、逐個完成所需空域劃設。該過程存在3 個子步驟:
1)將劃設的戰場空間進行標準化,獲取標準化后的各種信息,特別是位置信息。
2)利用每種空域劃設的歷史統計信息,對神經網絡進行訓練。
3)用訓練好的網絡對將要劃設的空域進行智能輔助劃設,給出劃設方案。方案包括位置坐標、角度、長和寬等。
Step4:形成空域劃設方案。將逐個劃設好的方案標繪到地圖,形成相關文檔。
Step5:評估空域劃設方案。對方案劃設的可行性進行評估,得出優缺點。若方案符合要求,則完成空域劃設;若方案不能滿足需求,則轉到Step6。
Step6:調整空域劃設方案。該步驟主要在前期網絡計算數據支撐的基礎上,由人工進行調整和完善其他內容,轉到Step4,形成新的空域劃設方案。
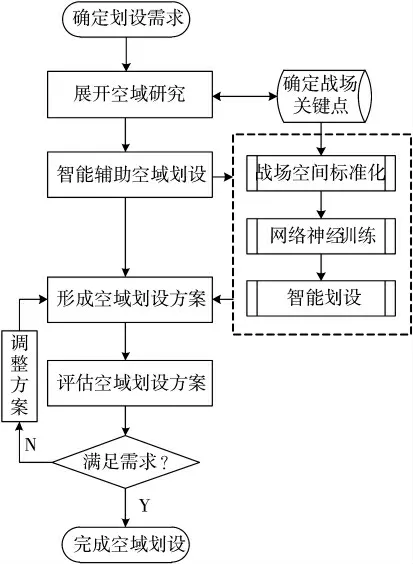
圖1 作戰空域智能劃設流程
由于戰場情況的轉變,會最直接地在關鍵點的改變上得到體現,因此,隨著戰爭階段的轉變,該方法能夠實時地對空域劃設進行調整,實現動態的劃設。
2 智能劃設模型建立
2.1 戰場標準化
由于作戰場景的不同(規模、樣式、行動大小等的不同),戰場的形狀和界限范圍會存在很大的差異,這種差別雖然不會改變人工空域劃設時大腦決策的內在邏輯,但不利于問題的數學描述和機器學習的標準化輸入。戰場空間的標準化是指通過對戰場空間的填充補余,使得戰場空間最終呈“矩形”,并以平行經緯線方向為坐標軸,建立相對坐標系,使得各種戰場關鍵點,按照相對位置關系散布于坐標系中,如圖2 所示。顯然,將所有的戰場關鍵點、情報及態勢轉化為標準形態,有利于神經網絡的學習和對未來戰場劃設的決策。
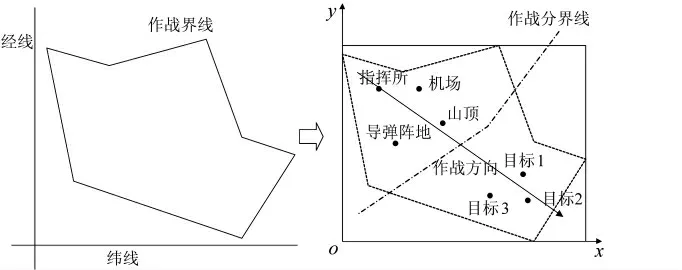
圖2 戰場標準化過程
2.2 相對坐標系
本文采用基于弧度制的全球坐標網格[8](RGRS),作為建立相對坐標系的基礎。RGRS 以180°W90°N(南極點)為原點,180°W 經線方向為y軸,按照0.01 rad×0.01 rad 進行劃分,形成628×314 個一級網格,網格大小為64 km×64 km;不斷進行10×10 均勻劃分,將形成各次級網格。若以戰場空間最左下角三級(精度640 m×640 m)弧度制的全球坐標網格的基準點為原點,則一個640 km×640 km 的戰場相對坐標系統如圖3 所示。
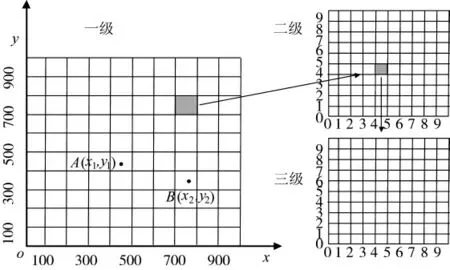
圖3 基于RGRS 網格的相對坐標系統
圖中,坐標點A(x1,y1)、B(x2,y2)表示坐標值,x1、y1、x2、y2為十進制的實數。則AB 之間的相對距離為:
由于關鍵點基本都是面目標,三級網格精度640 m×640 m,能夠滿足目標“點”定位的需要。將戰場各要素放入該相對坐標系,就能對戰場各要素之間的位置關系進行描述。
2.3 空域劃設模型
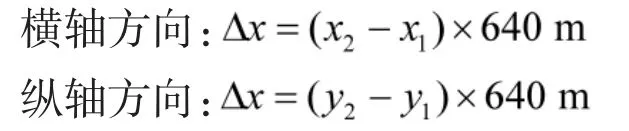
根據空域的種類及在戰爭中空域劃設的實踐經驗[9],空域的形狀主要可以抽象為:矩形(包括線性)、圓形、扇形及它們的組合。其中,為簡化起見圓形和扇形也都可以用一個最小外接矩形進行近似,如圖4 所示。因此,空域標準化就是將不同種類、形狀的空域,近似抽象為矩形或矩形組合的過程。
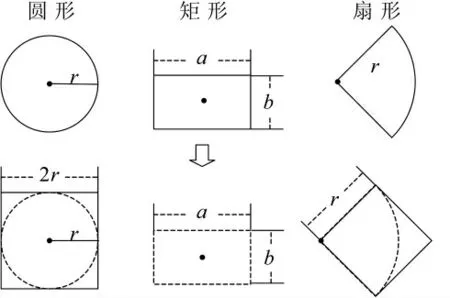
圖4 空域標準化過程
對于一個矩形,確定其具體位置形狀至少需要5 個參數,分別為:中心點橫坐標x、中心點縱坐標y、方位角度β、長度a、寬度b,確定這5 個參數就能確定該矩形空域在坐標系中的位置及狀態。
圖5 矩形空域位置及形狀參數
如圖5 所示,一個標準化的空域評價函數可寫為:f(x,y,β,a,b)。在空域標準化的基礎上,空域劃設問題,可轉化為一個最優化模型:
其中,m 分別表示空域的種類,ni表示第i 種空域的數量,fi(·)表示第i 種空域的評價函數,S 表示作戰區域。目標函數,表示尋求整體評價值最大的空域劃設方案;第1 個約束條件,指空域的中心點在作戰區域之內;第2 個約束,是指空域的長軸線與經線順時針方向的夾角在[0,π]之內。
3 智能劃設模型求解
各種空域劃設的評價函數fi(·)是一個模糊的、灰色的,往往由專家的經驗和直覺決定,獲取十分困難。對于這種難以確定的灰箱問題,可以采用神經網絡學習的方法,通過網絡連權的不斷調整,找到一個最能代表評價函數fi(·)的網絡模式,用以代替該評價函數,而無需徹底弄清fi(·)與戰場關鍵點之間的作用關系,其中BP 算法就是一種較為適合的模型。
BP 網絡是一種有監督式的學習算法[10],其主要思想是:通過樣本數據的訓練,使用反向傳播算法對網絡的權值和閾值進行反復的調整訓練,使輸出向量逼近期望輸出,當網絡輸出層的誤差小于指定的誤差時訓練完成,保存網絡的權值和閾值,多用于函數逼近、模型識別分類、數據壓縮和時間序列預測等。

圖6 m×p×n 三層BP 神經網絡結構
式中,△Wij為隱含層與輸出層的連接權調整量;△tj為輸出層閾值調整量;△Vij輸入層與隱含層的連接權調整量;其中β、α 為學習速率。
綜上所述,可以用一個較為簡單的方程式來表示BP 算法修正權值和閾值的迭代過程:

其中,X(k)是由網絡所有權值和閾值形成的向量,η是學習速率(由α,β 決定),F 為目標函數,△F(X(k))為目標函數的梯度,k 為迭代次數。
4 作戰空域智能劃設仿真
通過收集某一特定空域與哪些戰場關鍵點(不僅僅是戰場關鍵點,還可能是某種武器裝備的性能、攻擊方向等)可能存在相關性關系。將這些關鍵點的標準化信息(通過戰場和空域的標準化)作為網絡訓練的輸入,某種空域劃設的位置、角度、長度和寬度,作為網絡的輸出,對神經網絡進行訓練。
4.1 訓練樣本
以待戰空域劃設為例,通過調研確定劃設待戰空域主要與指揮所、目標點、攻擊方向、機場、導彈陣地位置等相關[11]。為簡化問題,假設待戰空域的劃設主要由我方指揮所、目標點及我方機場位置3個關鍵點確定。對某演習中20 個場景的待戰空域人工劃設情況,采用戰場和空域標準化方法,得到各關鍵點的統計信息(見表2),作為訓練樣本輸入,待戰空域信息作為樣本輸出(假設輸出空域的長和寬由機型決定,不由網絡計算)。
表2 待戰空域劃設訓練樣本
簡化后的問題以指揮所、目標點及機場位置參數為輸入,對應輸入節點個數為6,以待戰空域的位置和方位角信息為輸出,則輸出節點個數為3。顯然,該例是一個理想環境下樣本信息完全已知的確定性問題。然而,真實的戰場空域態勢感知,難度大幅度提升,獲取的信息大多是模糊的、不完善的,需采用模糊數學的方法,利用隸屬度函數,將模糊的數據“白”化,變成確定性問題,以此作為訓練網絡的樣本和網絡預測的輸入。
4.2 隱含層設計
有關研究表明[10],有一個隱含層的神經網絡,只要隱含層節點足夠多,就可以任意精度逼近一個非線性函數。因此,本文采用含有一個隱含層的三層多輸入多輸出的BP 網絡建立智能劃設模型。在網絡設計過程中,隱含層神經元個數過多,會加大網絡計算量并容易產生過度擬合問題;神經元個數過少,則會影響網絡性能,達不到預期效果。隱含層神經元的數目與實際問題的復雜程度、輸入和輸出層的神經元數,以及對期望誤差的設定有著直接的聯系。目前,對于隱含層中神經元數目的確定只有一些經驗公式,神經元個數的最終確定還需根據經驗及多次實驗來確定。本文參照以下的經驗公式:

其中,m 為輸入層神經元個數,n 為輸出層神經元個數,random(0,1)表示產生(0,1)之間的隨機數,“[]”表示向上取整,[10×random(0,1)]則表示為[1,10]之間的常數。根據上式,可以計算出神經元個數為4個~13 個之間,在本次仿真實驗中,通過多次試驗選擇隱含層神經元個數為5 較為合適。
BP 神經網絡通常采用“Sigmoid”可微函數和線性函數作為網絡的激勵函數。本文選擇S 型正切函數“tansig”作為隱層神經元的激勵函數。而由于網絡的輸出歸一到[-1,1]范圍內,因此,預測模型選取S型對數函數“tansig”作為輸入層神經元的激勵函數,采用“purelin”作為輸出神經元的激勵函數。
4.3 仿真實現
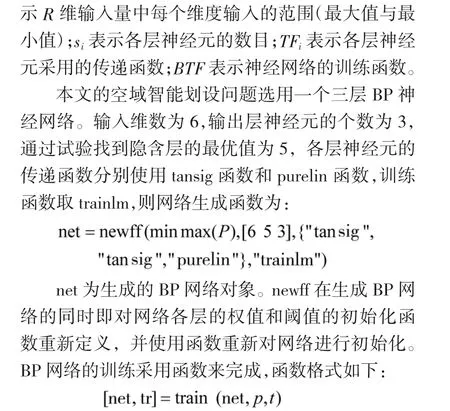
其中,p 為歸一化后的輸入樣本矢量集,t 為對應的目標樣本矢量集。對于本研究來說,輸入樣本為指揮所、目標點及機場的坐標,用Q×6 的矩陣來表示,Q 表示輸入樣本矢量的數量,為20。

圖7 網絡訓練收斂情況

將表3 中的數據展現在相對坐標系中,得到如圖8 所示的待戰空域相對位置和狀態。
由圖8 中展現的相對位置關系來看,訓練好的網絡net 能夠給出較好的待戰空域劃設方案,從而實現作戰空域智能劃設。由于訓練好的網絡net 模擬的是人腦關于空域劃設的評價函數,是一種主觀的決策偏好,它與戰場本身是沒有直接關系的,僅與一段時期內所采用的戰略戰術(將決定人的決策偏好)相關,因此,該模型有較好的通用性和適用性。該作戰空域劃設模型(訓練好的網絡)能夠嵌入指揮信息系統、戰役模擬系統等,通過不斷地積累和自我學習,能夠更好地展現空戰場態勢,將極大地提高作戰空域劃設效率。
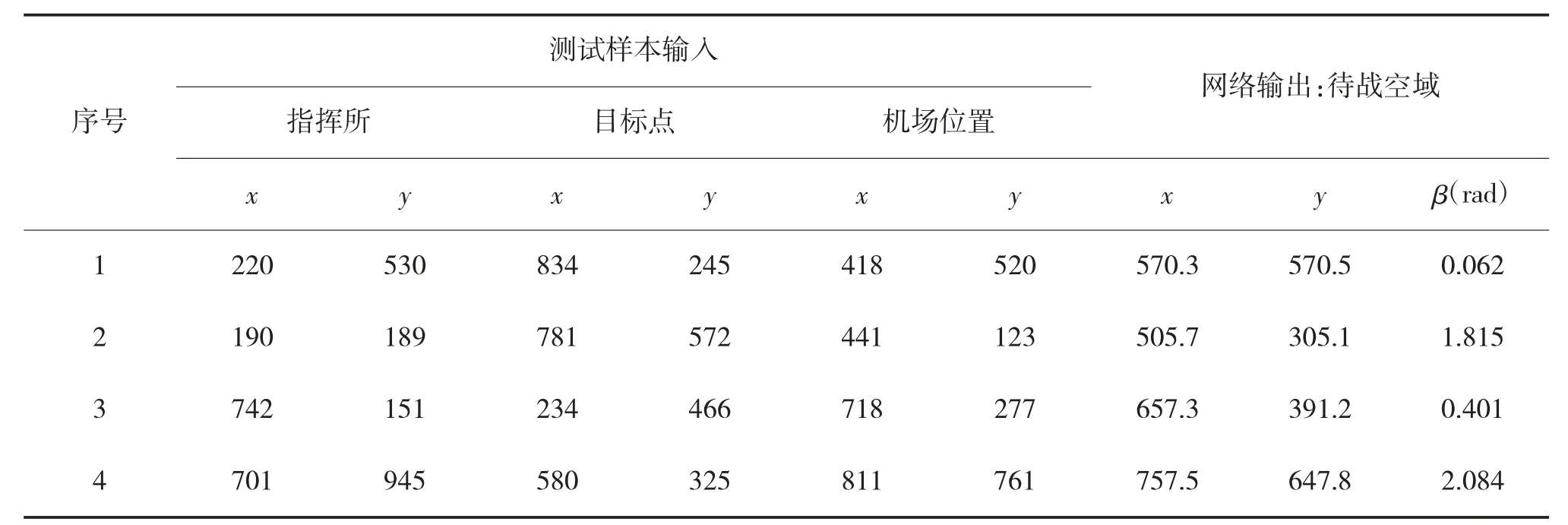
表3 測試組樣本
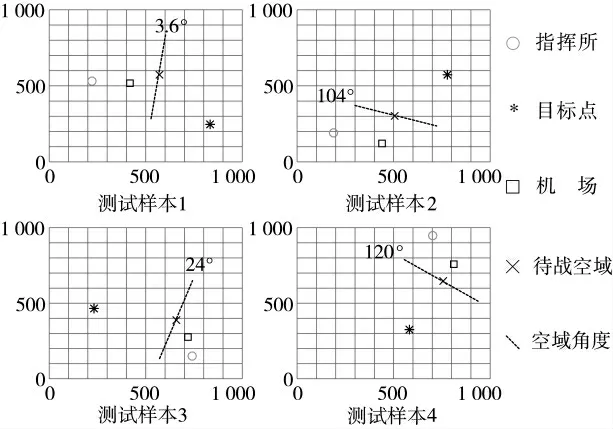
圖8 測試樣本輸出結果
5 結論
本文以戰場關鍵點和作戰空域之間的關系為基點,提出了作戰空域智能化劃設構想及流程;通過戰場和空域的標準化方法,訓練神經網絡,模擬人工作戰空域劃設的決策過程,實現了作戰空域的智能劃設。該構想是一種將空域劃設大數據與神經網絡等智能算法結合起來的可行方案,將促進空戰場管制基礎網格系統、空域劃設數據庫、空域標準化等方面的研究和發展,最終實現以大數據驅動、知識學習為重點的智能化戰場空域規劃。
猜你喜歡
中學生數理化·中考版(2022年12期)2022-02-16 07:36:56
今日農業(2021年8期)2021-11-28 05:07:50
口腔護理用品工業(2021年4期)2021-11-02 08:22:56
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國公路(2017年9期)2017-07-25 13:26:38
汽車維修與保養(2015年8期)2015-04-17 03:32:51
中國衛生(2014年2期)2014-11-12 13:00:16