考慮踏板速度的駕駛員制動強度識別研究
2021-01-21 06:35:52肖錦釗付宏勛楊富春
河南科技大學學報(自然科學版) 2021年3期
楊 坤,肖錦釗,王 杰,馬 超,付宏勛,楊富春
(1.山東理工大學 交通與車輛工程學院,山東 淄博 255000;2.山東意威汽車科技有限公司,山東 淄博 255000)
0 引言
電動汽車制動時,駕駛員制動強度識別的準確性直接影響到電動汽車真空助力及再生制動力分配,這也是保證電動汽車制動效能及制動安全性的關鍵因素[1]。目前,針對駕駛員制動強度識別方法的研究主要集中在識別參數及控制算法的選取等方面。在識別參數的選取方面,文獻[2]考慮到制動初速度與制動強度的關系,選取制動初速度、踏板位移和踏板速度作為識別參數。文獻[3]對不同路面附著條件下的制動強度進行了研究,選取路面附著系數、踏板位移和踏板速度作為識別參數。文獻[4]考慮到車輛制動過程中,加速踏板位移及加速踏板速度能夠反映駕駛員制動強度,選取加速踏板位移與加速踏板速度作為識別參數。在控制算法的選取方面,文獻[5-6]基于大量仿真工況,利用模糊控制算法對駕駛員制動強度進行識別。文獻[7]將模糊控制算法與神經網絡算法相結合,對駕駛員制動強度進行了識別。以上文獻在選取制動強度識別參數時,大多默認踏板位移、踏板速度為必選項,但在緊急制動時傳統踏板速度計算方法存在較大誤差,這會影響駕駛員制動強度的識別精度。為此,本文提出了考慮駕駛員不同制動意圖的踏板速度計算方法及對應的駕駛員制動強度識別方法。選取踏板壓力變化率、車輪減速度和踏板位移作為識別參數,利用模糊控制算法對駕駛員制動意圖進行預識別,選取踏板位移及不同制動意圖下的踏板速度作為識別參數,利用模糊控制算法對駕駛員制動強度進行識別。
1 駕駛員制動強度識別流程
駕駛員制動強度識別流程如圖1所示,當檢測到駕駛員踩下制動踏板時,系統接收踏板壓力傳感器、輪速傳感器、踏板位移傳感器所采集到的踏板壓力、輪速、踏板位移信號,并將信號傳遞到數據處理模塊。數據處理模塊對踏板壓力進行微分計算,得出踏板壓力變化率;數據處理模塊將輪速轉化成車輪線速度,并對其進行微分計算,得出車輪減速度;數據處理模塊將踏板壓力變化率、車輪減速度和踏板位移傳遞到模糊控制器1中;數據處理模塊將踏板位移傳遞到模糊控制器2中。模糊控制器1接收踏板壓力變化率、車輪減速度和踏板位移來預識別駕駛員制動意圖。系統根據識別出的駕駛員制動意圖,分別在輕度、中度、緊急制動時設置踏板位移采樣周期為A、B、C,并對踏板位移曲線進行微分計算,得到踏板速度,然后將踏板速度傳輸到模糊控制器2中。模糊控制器2實時接收踏板位移和踏板速度來識別駕駛員制動強度。當系統檢測到駕駛員松開制動踏板時,退出程序。
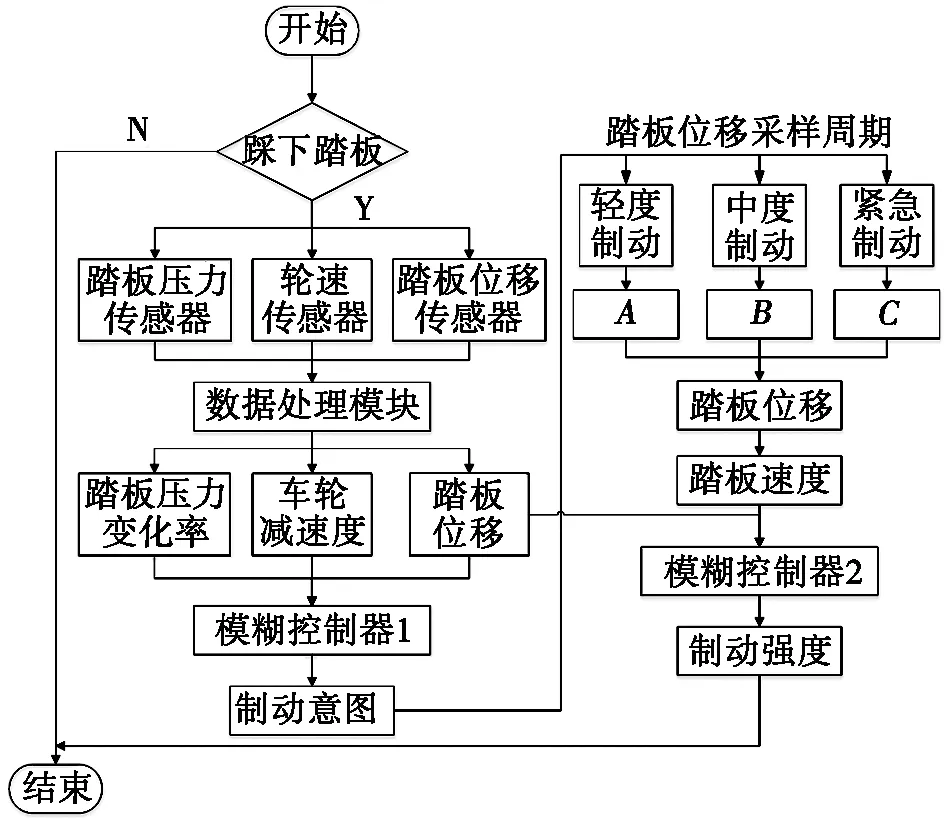
圖1 駕駛員制動強度識別流程圖
2 制動意圖預識別
踏板位移信號穩定,能夠第一時間反映駕駛員制動意圖[8-9],但單獨通過踏板位移無法判斷制動緊急程度,可根據踏板壓力變化率來判斷制動緊急程度。考慮到相同的踏板位移在不同附著系數路面上對應的車輪減速度不同,可根據車輪減速度來判斷不同附著系數路面的駕駛員制動意圖,為此選取踏板壓力變化率、車輪減速度和踏板位移作為駕駛員制動意圖識別參數。與邏輯門限值算法相比,模糊控制算法識別精確度更高,因此選擇模糊控制算法對駕駛員制動意圖進行識別,踏板壓力變化率、車輪減速度和踏板位移為輸入變量,駕駛員制動意圖為輸出變量。
2.1 模糊化處理
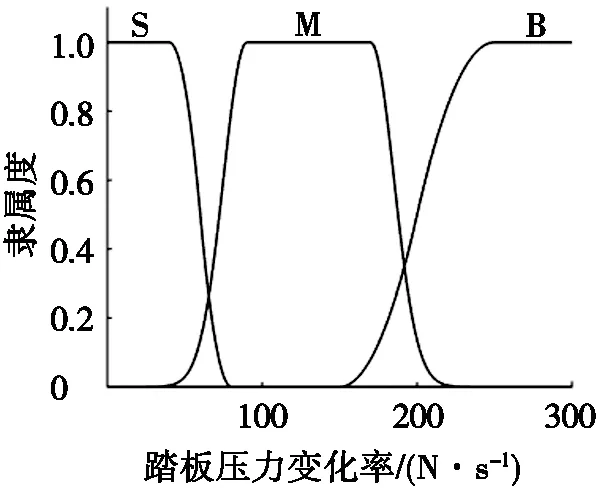
模糊控制器1輸入、輸出隸屬度函數如圖2所示。定義踏板壓力變化率論域為[0,300],劃分為[0,80]、[40,210]、[150,300],構建小(S)、中(M)、大(B)3個模糊子集,其隸屬度函數如圖2a所示。
定義車輪減速度論域為[0,9.8],劃分為[0,2.5]、[5.0,7.5]、[5,9.8],構建小(S)、中(M)、大(B)3個模糊子集,其隸屬度函數如圖2b所示。
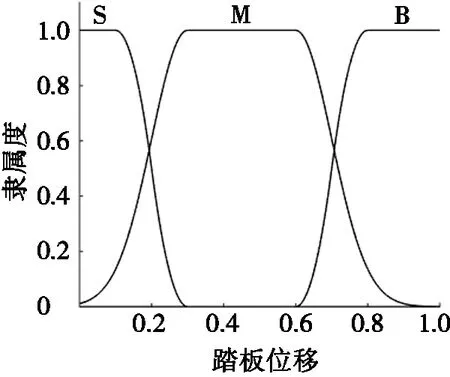
定義踏板位移論域為[0,1.0],劃分為[0,0.3]、[0.1,0.8]、[0.6,1.0],構建小(S)、中(M)、大(B)3個模糊子集,其隸屬度函數如圖2c所示。
根據上述3個控制變量,利用模糊控制器1可初步判斷駕駛員制動意圖。定義制動意圖論域為[0,3.0],劃分為[0,1.2]、[0,2.5]、[1.8,3.0],構建輕度制動(S)、中度制動(M)、緊急制動(B)3個模糊子集,其隸屬度函數如圖2d所示。
2.2 模糊規則
踏板壓力變化率、車輪減速度和踏板位移均可反映駕駛員制動意圖,且數值越大,制動意圖越緊急,因此根據踏板壓力變化率、車輪減速度和踏板位移均與制動意圖成正比的原則,制定相應的模糊控制規則:
當車輪減速度為S、踏板壓力變化率為S、踏板位移為S/M/B時,制動意圖為S/S/S;當車輪減速度為S、踏板壓力變化率為M、踏板位移為S/M/B時,制動意圖為S/S/M;當車輪減速度為S、踏板壓力變化率為B、踏板位移為S/M/B時,制動意圖為S/M/M;當車輪減速度為M、踏板壓力變化率為S、踏板位移為S/M/B時,制動意圖為S/M/M;當車輪減速度為M、踏板壓力變化率為M、踏板位移為S/M/B時,制動意圖為M/M/M;當車輪減速度為M、踏板壓力變化率為B、踏板位移為S/M/B時,制動意圖為M/M/B;當車輪減速度為B、踏板壓力變化率為S、踏板位移為S/M/B時,制動意圖為M/M/M;當車輪減速度為B、踏板壓力變化率為M、踏板位移為S/M/B時,制動意圖為M/M/B;當車輪減速度為B、踏板壓力變化率為B、踏板位移為S/M/B時,制動意圖為M/B/B。
基于上述模糊子集,模糊控制器1實時接收駕駛員踏板壓力變化率、車輪減速度、踏板位移,確定踏板壓力變化率、車輪減速度、踏板位移所處的模糊子集,基于模糊控制規則,模糊控制器1可推理得到駕駛員制動意圖。
3 制動強度識別
3.1 踏板速度計算
由于緊急制動時踏板速度和制動強度識別精度較差[10],應考慮通過提高踏板速度計算精度來提高制動強度識別準確性,而踏板位移采樣周期的大小與踏板速度計算量和計算精度密切相關,因此,可根據初步判斷得到的制動意圖,設置不同踏板位移采樣周期。
(Ⅰ)輕度制動時間較長,踏板位移變化緩慢,為節省計算時間,采用較大的踏板位移采樣周期。
(Ⅱ)緊急制動時間最短,為準確計算踏板速度,采用較小的踏板位移采樣周期。
基于以上原則,標定踏板位移采樣周期:輕度制動時,踏板位移采樣周期為0.07 s;中度制動時,踏板位移采樣周期為0.04 s;緊急制動時,踏板位移采樣周期為0.02 s。
根據上述不同采樣周期,利用式(1)可計算得到不同制動意圖下的制動踏板速度[11]:
Vp=△Lp/△t=(Lp2-Lp1)/△t,
(1)
其中:Vp為踏板速度;△Lp為踏板位移差值;△t為采樣周期;Lp2為當前采樣時刻的踏板位移;Lp1為上一采樣時刻的踏板位移。
3.2 制動強度計算
制動踏板壓力、制動踏板位移、制動踏板速度、車速、制動管路壓力等均可作為制動強度識別參數[12-14],由于制動時駕駛員首先會對踏板做出動作,踏板位移和踏板速度能在第一時間反映駕駛員制動強度,因此選取踏板位移和踏板速度作為識別參數,基于模糊控制算法識別駕駛員制動強度。
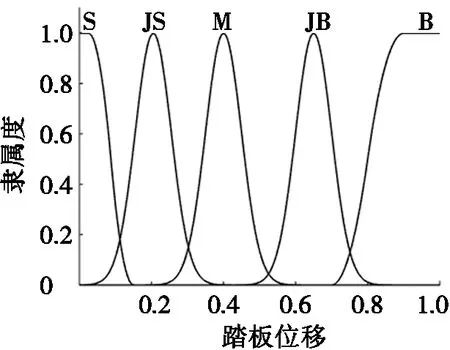
模糊控制器2輸入、輸出隸屬度函數如圖3所示。定義踏板位移論域為[0,1.00],劃分為[0,0.15]、[0.05,0.35]、[0.25,0.55]、[0.50,0.80]、[0.70,1.00],構建小(S)、較小(JS)、中(M)、較大(JB)、大(B)5個模糊子集,其隸屬度函數如圖3a所示。
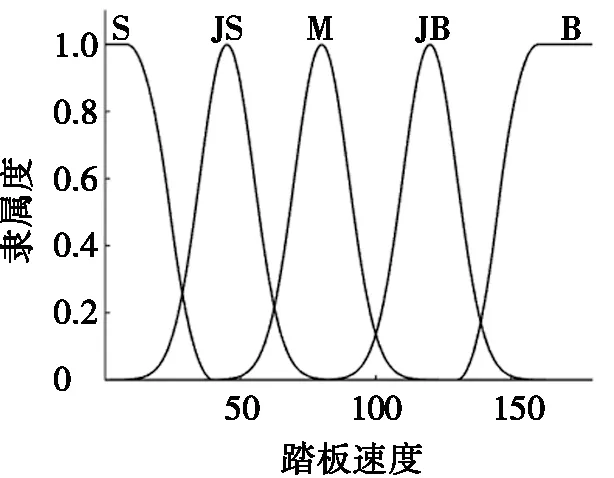
定義踏板速度論域為[0,180],劃分為[0,40]、[10,70]、[50,110]、[90,150]、[130,180],構建小(S)、較小(JS)、中(M)、較大(JB)、大(B)5個模糊子集,其隸屬度函數如圖3b所示。
定義制動強度論域為[0,1.00],劃分為[0,0.25]、[0.10,0.40]、[0.25,0.55]、[0.40,0.70]、[0.50,0.80]、[0.65,0.95]、[0.80,1.00],構建極小(VS)、小(S)、較小(JS)、中(M)、較大(JB)、大(B)、極大(VB)7個模糊子集,其隸屬度函數如圖3c所示。
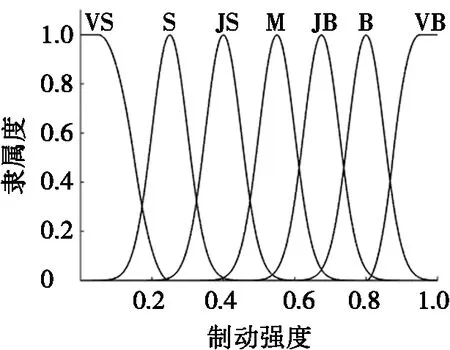
(a) 踏板位移隸屬度函數 (b) 踏板速度隸屬度函數 (c) 制動強度隸屬度函數
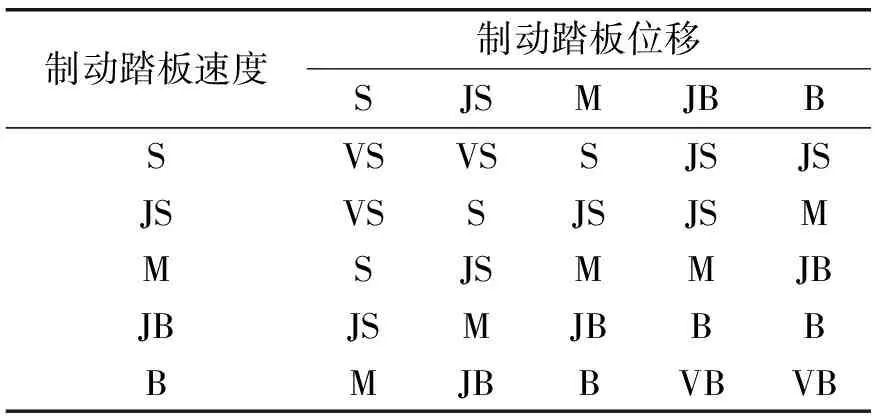
表1 制動強度模糊控制規則表
3.3 模糊規則
踏板位移和踏板速度能在第一時間反映駕駛員制動強度,且踏板位移和踏板速度越大,表示此時制動強度越大,因此根據踏板位移和踏板速度均與制動強度成正比的原則,制定相應的模糊規則,如表1所示。
基于上述模糊子集,模糊控制器2接收駕駛員踏板位移、踏板速度,確定踏板位移、踏板速度所處的模糊子集,基于表1,模糊控制器2可推理得到駕駛員制動強度。
4 仿真分析
4.1 仿真工況
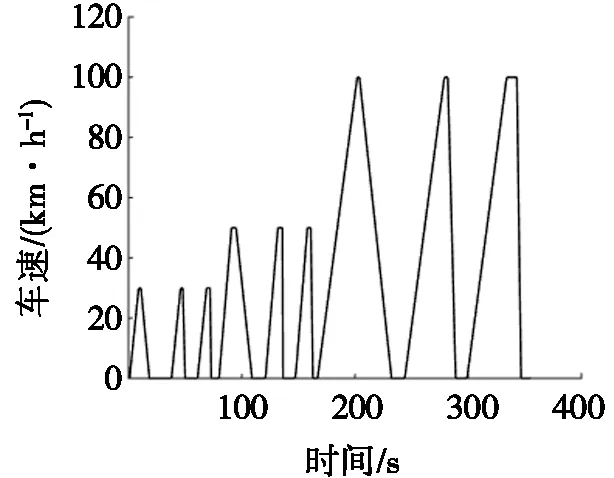
圖4 設定制動仿真工況
目前,各國進行車輛試驗采用的循環工況主要有NEDC工況、美國FTP-75標準循環工況、日本10.15工況等,這些工況主要用在測量排放以及燃油經濟性等方面,針對制動,國際上還沒有標準的循環工況[15]。為驗證不同制動初速度及不同制動強度情況下駕駛員制動強度識別系統有效性及準確性,設定仿真工況如下[16-17]:初速度為30 km/h的低速輕度、中度、緊急制動工況;初速度為50 km/h的中速輕度、中度、緊急制動工況;初速度為100 km/h的高速輕度、中度、緊急制動工況。輕度、中度、緊急制動時,設置車輛目標制動強度分別為0.1、0.4、0.8,設定制動仿真工況如圖4所示。
4.2 仿真分析
通過兩種方案的對比來驗證提出的駕駛員制動強度識別方法的有效性,方案1中踏板位移采用固定采樣周期,方案2采用本文提出的踏板位移采樣周期。兩組方案均選取踏板位移、踏板速度作為制動強度識別參數,設定9種工況,對踏板速度及制動強度進行識別,仿真結果如圖5和圖6所示。
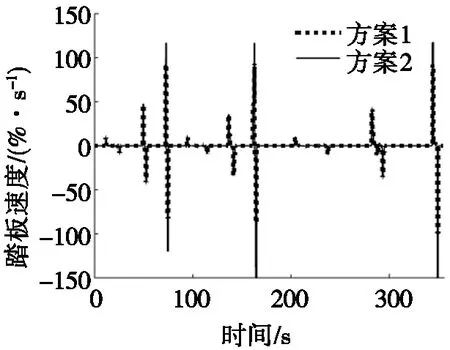
圖5 踏板速度
由圖5可知:在輕度、中度制動時,兩種方案的踏板速度計算結果相差1%·s-1左右,而在緊急制動時,方案1踏板速度計算結果比方案2小25%·s-1左右。由圖6可知:無論車速高低,在輕度、中度制動時,兩種方案的制動強度計算誤差均在2.5%左右,在緊急制動時,方案1制動強度計算誤差為10%,方案2制動強度計算誤差僅為1.25%,相比于方案1誤差降低了8.75%,準確度顯著提高。因此,提出的駕駛員制動強度識別方法是有效的,根據駕駛員制動意圖設置踏板位移采樣周期,能夠更準確地計算踏板速度和制動強度,有助于提高汽車制動安全性。
5 結論
(1)以踏板壓力變化率、車輪減速度和踏板位移作為識別參數的駕駛員制動意圖識別方法,可以識別出不同制動緊急程度及路面附著條件下的駕駛員制動意圖,有效提高制動意圖識別方法的適應性。
(2)考慮駕駛員不同制動意圖下的踏板速度計算方法及對應的駕駛員制動強度識別方法,可以在輕度制動時增大踏板位移采樣周期,在緊急制動時縮小踏板位移采樣周期,能夠準確計算不同車速、制動強度下的踏板速度,有效提高駕駛員制動強度識別精度,有助于提高汽車制動安全性。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
汽車電器(2018年1期)2018-06-05 01:22:54
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
公民與法治(2016年4期)2016-05-17 04:09:26