雙站極坐標法在混凝土壩變形監測中的應用
2021-01-20 04:03:20占曉明李見陽袁珊麗
經緯天地 2020年6期
占曉明 李見陽 袁珊麗
(浙江華東測繪與工程安全技術有限公司,浙江 杭州 310014)
0.引言
大壩外部變形監測是大壩安全監測的重要內容,現有各類監測方法都必須滿足國家或行業規范要求[1]。混凝土壩變形監測主要采用視準線、引張線、正倒垂線,其余還有交會法、大氣或真空激光準直系統等[2]。垂線、引張線以及激光準直系統均需在大壩上布設永久觀測儀器,施工過程復雜,成本較高。視準線和交會法一般采用高精度全站儀,僅需布置工作基點和監測點,觀測方便,操作簡單,成本較低,非常適用于各類中小型大壩。視準線法,因其原理限制,測線需布置成直線,且測線長度一般不宜過長,因此其僅適用于中小型的重力壩或閘壩等,不適用于拱壩和大范圍的邊坡監測。交會法因其具有成本低、適用條件廣、操作簡便等優點,在水電站大壩及邊坡的變形監測中廣泛應用。
單站極坐標法作為交會法的一種,其外業操作簡便,成果計算簡單。但由于單站極坐標法受儀器精度限制,難以滿足混凝土壩變形監測精度要求。如采用TS30 全站儀,工作基點距離監測點300m 時,監測點位移理論估算精度為±1.4mm,無法滿足《混凝土壩安全監測技術規范DL/T 5178-2016》的要求。
雙站極坐標法作為單站極坐標法的改進方法,其較單站極坐標法增加了檢核與校驗條件,提高了可靠性和觀測精度[3]。但雙站極坐標法的實測精度能否滿足《混凝土壩安全監測技術規范DL/T 5178-2016》的要求,相關研究較少。本文以寶泉水電站下水庫大壩變形監測為例,從數據預處理、理論精度估算、實測精度分析等方面對該方法的可行性、適用條件進行了分析,得出一些結論,供類似工程參考。
1.數據預處理
實測變形監測數據中包含了真實變形及測量誤差,如不進行預處理,進行精度分析時,其中誤差統計結果會明顯失真。常用的數據預處理方法是對數據序列進行數據平穩性檢驗(趨勢性判斷)和趨勢項剔除。
1.1 平穩性檢驗
變形監測數據是時間序列的一種,時間序列的平穩性是進行時間序列分析的一個基本前提,盡管實際生活的多數時間序列都符合平穩性(廣義平穩)條件,但在通常情況下仍需對數據序列進行平穩性檢驗。
平穩性檢驗的方法有許多種,應根據變形監測成果序列的實際情況選擇合適的平穩性檢驗方法。
本文介紹一種簡單實用的平穩性檢驗法,該方法只涉及一組數據,而不需要假設數據的分布規律[4]。該方法是平穩性非參數檢驗方法的一種,也稱游程檢驗法,其使用簡單,非常適用于變形監測數據的平穩性檢驗。
在保持隨機序列原有順序的情況下,游程定義為具有相同符號的序列,這種符號可把觀測值分成兩個相互排斥的類。例如觀測序列的值xi(i=1,2,…N)其均值,用符號“+”表示xi≥,而“-”表示xi<。按符號“+”和“-”的出現順序將原系列寫成如下形式,例如

“+”號和“-”共14個,分7個游程。每個游程的長短在這里并不重要。游程太多或太少都被認為是存在非平穩趨勢[4]。游程檢驗所判斷的原假設為:“樣本是平穩的”。采用的樣本統計量有:N1=一種符號出現的總數;N2=另一種符號出現的總數;γ=游程總數。
當任意一種符號出現的總數超過15 時,即可以基于正態分布來進行穩定性檢驗。
構建統計量:
對于α=0.05 的顯著水平,如果|Z|≤1.96(兩倍中誤差),則可接受原假設,數據是平穩的(沒有趨勢性),否則就拒絕原假設。
1.2 趨勢項剔除
1.2.1 差分法
差分法是實踐中最常用的剔除趨勢項的方法,主要原理為各期成果間依次相減,得出每期的變化量,再以每期的變化量為樣本統計其中誤差。
差分法僅適用于趨勢項比較平穩的情形,無差別地使用該方法同樣會導致結果失真,統計精度偏低。
變形監測成果精度分析中,通常是基于每期成果的變化量進行。其基本原理即是通過差分法消除各期觀測成果間的誤差“同類項”。但是,誤差的成因十分復雜。不同期次的觀測成果,其誤差影響因素(監測人員、監測儀器、監測環境)不可能完全一致。因此,通過差分不能完有效剔除趨勢項。
1.2.2 滑動平均法
為了更好地表示測量結果,抑制誤差的影響,常對動態數據進行平滑和濾波,即認為小區間數據是平穩的,而對其進行某種局部平均,以減少誤差影響[5]。沿全長N 個數據逐一小區間上進行不斷局部平均,即可得出較平滑的測量結果[6]。其處理步驟如下:
第一步:設觀測值{x1,x2,…xn},如果周期為偶數,如d=2q,則有:

如果周期是奇數,如d=2q+1,則用公式(6):

第二步:估計周期項
對于k=1,…,d,計算偏差:

由于偏差平均值之和不為零。故sk的估計:
2.精度計算方法
2.1理論精度估算
寶泉水電站下水庫變形監測采用雙站極坐標法,其原理是兩次獨立單站極坐標法成果取算術平均。
雙站極坐標法的理論估算精度估算公式為:

式中,S1為工作基點A至被監測點的水平距離;S1為工作基點B至被監測點的水平距離;mα為測角中誤差,取儀器標稱測角精度:±0.5″;ms為測邊中誤差,可根據本項目采用的徠卡TS30 全站儀標稱測距精度±(0.6mm+1ppm×S)進行估算;S為測站至監測點距離,ρ=206265。
該理論精度估算方法只考慮了監測方法和監測儀器,忽略了監測人員和監測環境的影響,因此其理論預估精度通常要高于實測精度。但是,在短距離測量情況下,全站儀的實測精度通常要優于標稱精度。綜合以上兩方面因素,應用公式(10)估算的理論精度與實測精度基本一致。
從理論精度估算公式可以看出,雙站極坐標法精度主要受測角精度、測距精度以及測站至測點間距離影響。在儀器標稱精度確定的情況下,測角精度和測距精度主要受距離長短影響。因此,雙站極坐標法主要通過控制工作基點與監測點間距離來控制誤差。
當監測點距離兩個工作基點距離均為300m 時,監測點位移的理論精度剛好滿足《混凝土壩安全監測技術規范DL/T 5178-2016》要求±1.0mm。
由此可見,當監測點至測站距離不長時(一般不超過300m)時,采用高精度全站儀的雙站極坐標法理論精度可以滿足混凝土壩變形監測要求。
寶泉水電站下水庫各大壩變形監測點至A 工作基點(編號A2)的距離為52.3m~436.8m,各大壩變形監測點至測站B(編號L2-1)距離為130.5m 至478.9m,其理論預估精度統計表(如表1 所示)。由表1 可見,變形監測點的理論預估精度為±0.9mm~1.1mm,基本滿足《混凝土壩安全監測技術規范DL/T 5178-2016》的要求。
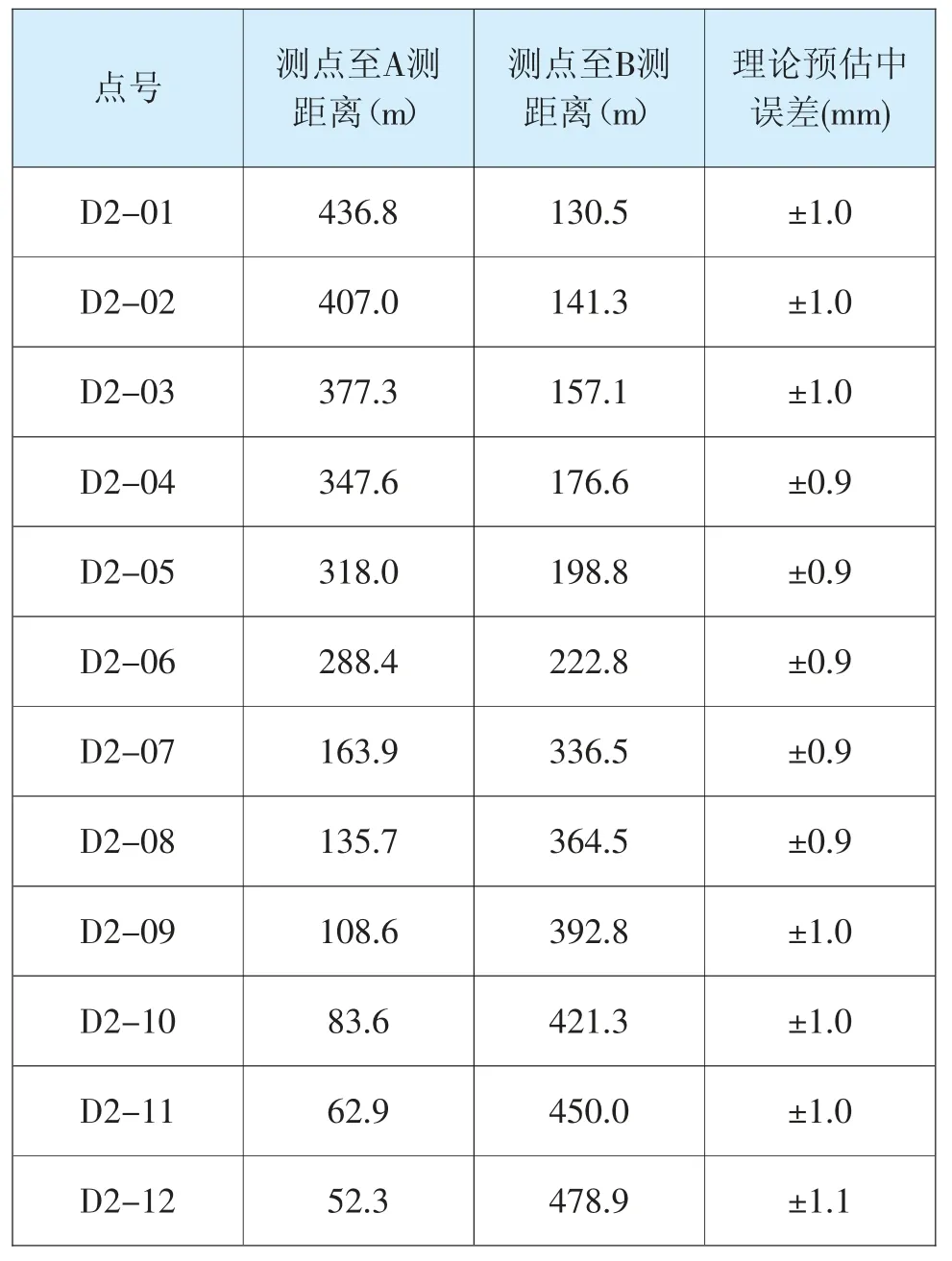
表1 下水庫大壩變形監測理論預估精度統計表
2.2實測精度計算
經過趨勢項剔除的數據,按照公式(11)進行統計其中誤差用于精度評估。

式中,v為改正數,取多期算術平均值與各期觀測值之差,即νi=xi-x。
3.實例分析
寶泉水電站位于河南省新鄉市,工程由上水庫大壩工程、下水庫大壩工程、引水發電系統、開關站等幾部分組成。其中,下水庫大壩為漿砌石大壩改建的混凝土大壩,壩高107.5m,工程建于1974 年,1994 年建成,主要以灌溉為主,運行至今大壩和庫岸邊坡安全穩定,沒有出現任何問題。
為監測大壩變形,在壩頂防浪墻上布設了12 個變形監測點。以整個溢流壩段為分界段,將12 個位移監測點分別布置在大壩的左右壩段,每兩個監測點間距為30m,其中D2-01~D2-06 布置在左壩段,D2-07~D2-12 布置在右壩段。測點布置圖(如圖1 所示):
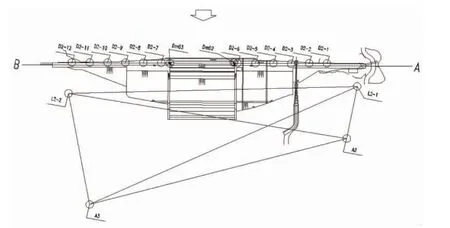
圖1 下水庫大壩變形監測點布置圖
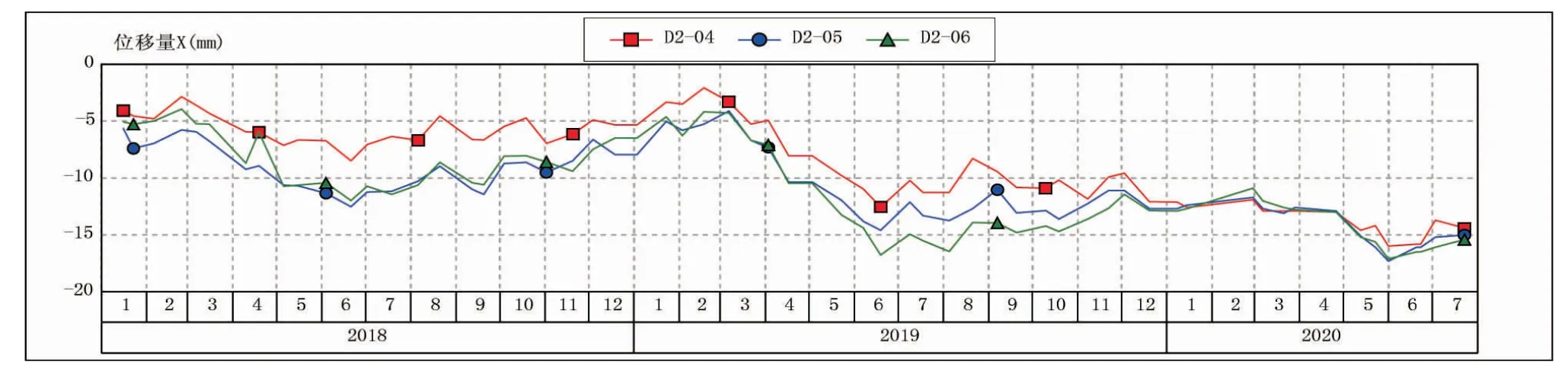
圖2 D2-4、D2-5、D2-6 上下游方向過程線圖
下水庫大壩變形監測自2018 年1 月改用徠卡TS30 高精度全站儀雙站極坐標法進行監測,工作基點分別為A2、L2-1,監測頻次為每月2 次,監測過程中嚴格進行了氣象參數測定,成果計算時采用兩次單站成果取算術平均。
選取2018 年1 月至2020 年7 月,共計60 期的變形監測成果進行分析。其中D2-4、D2-5、D2-6 三個監測點上下游方向的過程線(如圖2 所示)。從圖2 可見,D2-4、D2-5、D2-6 三個監測點上下游方向最大變化幅度約20mm,月變化量平均3mm~5mm,且存在明顯的趨勢性變化,需對監測序列進行預處理。
本文先采用游程檢驗法對成果序列進行平穩性檢驗,檢驗結果(如表2 所示)。檢驗結果顯示:所有測點的監測成果序列均未通過平穩性檢驗,存在趨勢性位移。
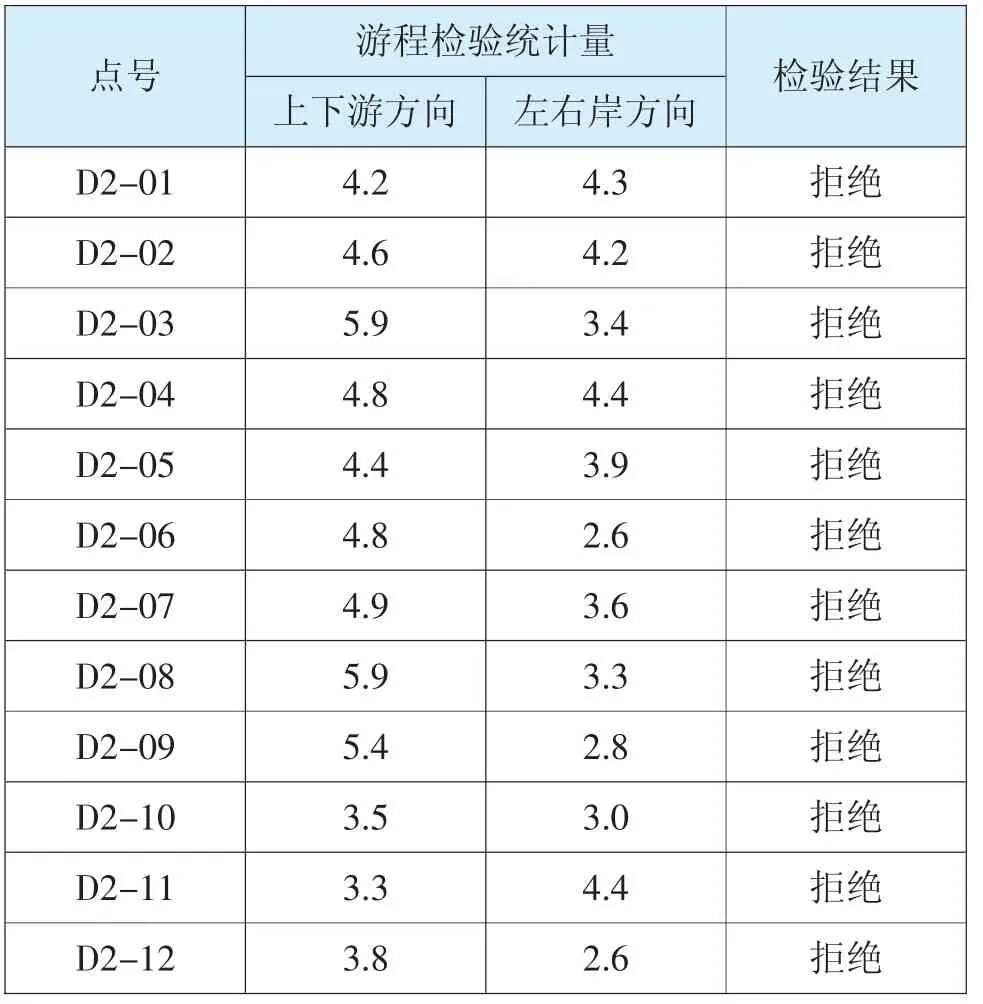
表2 下水庫大壩變形監測序列平穩性檢驗結果
根據上述檢驗結果,分別采用差分法和滑動平均法對成果序列進行趨勢項剔除,再統計各點理論預估中誤差、采用不同方法剔除了趨勢項后的中誤差,各項中誤差統計(如表3 所示):

表3 下水庫大壩變形監測精度統計表
由表3 可見,各點理論精度估算值為±0.9mm~±1.1mm。趨勢項剔除前,實測中誤差為±2.2mm~±3.8mm,明顯低于理論預估精度。采用差分法進行趨勢項剔除后,其中誤差為±1.8mm~±2.5mm,而采用滑動平均法的中誤差為±0.9mm~±1.2mm,后者與理論預估中誤差基本一致。可見監測成果中有顯著趨勢性位移時,滑動平均法比差分法效果更好。
從表3 可見,采用滑動平均法趨勢項剔除后的實測中誤差為±0.9mm~±1.2mm,多數測點實測中誤差略微超過混凝土壩安全監測技術規范中要求的混凝土壩外部變形監測精度優于±1mm。主要原因為監測點距離工作基點較遠(至少1 個工作基點距離監測點超過300m)。
實踐中,除規范要求精度外,還應根據變形量綜合確定監測方法是否可行。寶泉水電站下水庫大壩雖然從水電站管理角度定為混凝土壩,但其是在漿砌石重力壩的基礎上改造而來。其壩高91m 以下為原漿砌石壩體,只有加高的26m 壩體為混凝土壩體。因此寶泉水電站下水庫大壩較常規的混凝土重力大壩變形大,實測最大變形幅度約20mm。
大壩變形監測實踐中,一般要求監測成果的誤差要顯著小于變形量。國際測量工作者聯合會(FIG)變形監測研究小組提出測量誤差應小于變形量的1/20~1/10,國內外部分學者提出應在1/10~1/4 之間[7]。
從表3 統計中誤差可見,實測精度達到變形量的1/22~1/16,完全滿足上述要求,可見雙站極坐標法進行混凝土壩變形監測是可行的。
4.結論
本文基于實測數據,對雙站極坐標法進行理論估算精度和實測精度統計分析得出以下結論:
(1)雙站極坐標法具有操作簡便、計算簡單、成果可靠、成本低等優點,采用雙站極坐標法進行混凝土壩變形監測是可行的。
(2)采用極坐標法進行混凝土壩變形監測時,應嚴格控制監測點至工作基點距離,一般不超過300m。超過300m 時,應進行專項技術設計,并核算監測點的位移精度是否滿足相應規范要求。
(3)當變形監測成果中存在顯著趨勢性位移時,進行成果實測精度分析前應進行數據預處理,剔除成果中的趨勢項。滑動平均法比差分法的趨勢項剔除效果更好。
猜你喜歡
現代裝飾(2022年5期)2022-10-13 08:48:04
建材發展導向(2022年10期)2022-07-28 03:04:00
建材發展導向(2021年7期)2021-07-16 07:08:04
中華詩詞(2020年1期)2020-09-21 09:24:52
水利規劃與設計(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
