PID控制在潛艇垂直運(yùn)動中的應(yīng)用
2021-01-20 06:21:02楊智玲廈門海洋職業(yè)技術(shù)學(xué)院
數(shù)碼世界 2020年12期
楊智玲 廈門海洋職業(yè)技術(shù)學(xué)院
1 引言
我國是一個海洋大國,從古至今,人們從未停止過探索海洋的腳步。習(xí)近平總書記在十八大上提出了“海洋強(qiáng)國”戰(zhàn)略,為了維護(hù)領(lǐng)海的完整與安全,建設(shè)強(qiáng)大的現(xiàn)代化海軍已成為當(dāng)代中國國防迫切需要實(shí)現(xiàn)的目標(biāo)。潛艇作為能夠在水下運(yùn)行的大型機(jī)械,因其種類多樣,形狀各異,能長時間作業(yè)等特點(diǎn)引起了世界各國專家學(xué)者們的熱切關(guān)注。自二十世紀(jì)以來,許多軍事大國在建設(shè)海軍的時候都不約而同把潛艇作為重要的建設(shè)對象。潛艇的應(yīng)用非常廣泛,在軍事上可以作為攻擊主力,既可充當(dāng)防御也可以突破敵方封鎖。潛艇也被用于非軍事用途上,如在海洋科研、考古探險(xiǎn)、勘探開采、搜索援救、觀光旅游等活動中都可以看到潛艇的身影。
對潛艇進(jìn)行動力學(xué)建模是設(shè)計(jì)控制策略的基礎(chǔ)。潛艇通常是做六自由度的空間運(yùn)動,由于其結(jié)構(gòu)復(fù)雜和容易受到海浪和洋流等各種外界因素的影響,獲得的動力學(xué)方程往往不夠精確,且非線性嚴(yán)重、耦合程度高,研究難度大。因此在現(xiàn)實(shí)處理中,一般需要把潛艇水下操縱運(yùn)動分為水平面運(yùn)動和垂直面運(yùn)動來進(jìn)行控制系統(tǒng)設(shè)計(jì),這種方法稱為分平面設(shè)計(jì)。此外,由于潛艇動力學(xué)模型的運(yùn)動方程非線性程度高,在對潛艇操縱運(yùn)動進(jìn)行研究時可以對潛艇的實(shí)際模型進(jìn)行線性化處理。PID控制算法是最早發(fā)展起來的經(jīng)典控制算法。該算法于20世紀(jì)30、40年代提出,由于簡單易懂,在實(shí)際工程控制中得到廣泛應(yīng)用。采用PID算法的控制過程中,可以通過調(diào)節(jié)三個控制參數(shù)來實(shí)現(xiàn)控制目標(biāo)。對于典型的“一階/二階滯后+純滯后”的控制系統(tǒng)來說,PID控制算法是最優(yōu)的控制算法之一。PID控制算法的主要優(yōu)勢在于參數(shù)整定簡便靈活,三個控制參數(shù)可以根據(jù)控制需要隨意組合。本文采用比例微分(PD)調(diào)節(jié)控制算法設(shè)計(jì)控制器對潛艇垂直運(yùn)動的線性模型進(jìn)行控制,并進(jìn)行仿真驗(yàn)證。
2 潛艇模型
本文采用以下潛艇線性模型:

3 PID控制器設(shè)計(jì)
3.1 控制目標(biāo)及要求
3.2 控制器設(shè)計(jì)
在整個潛伏過程中,艉舵、圍殼舵同時控制縱傾角:
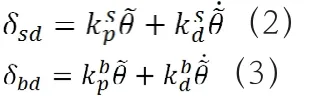
最終,通過對縱傾角的控制實(shí)現(xiàn)深度的控制。
4 系統(tǒng)仿真及性能仿真
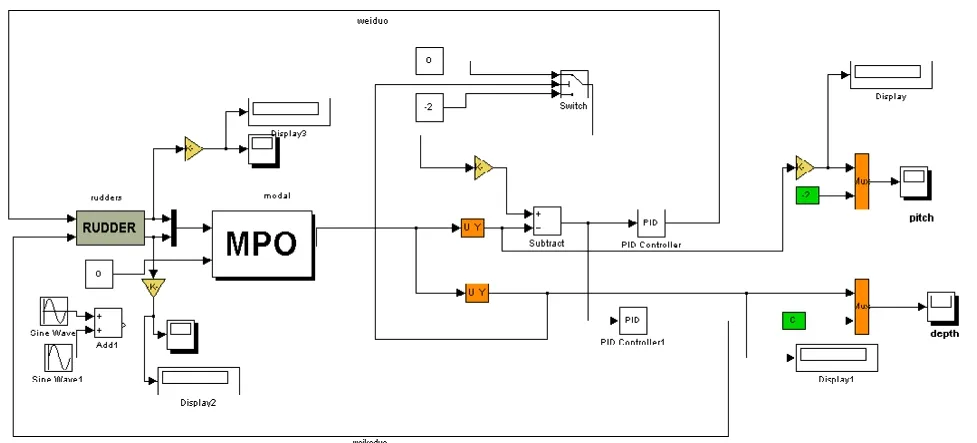
圖1 PID仿真結(jié)構(gòu)圖
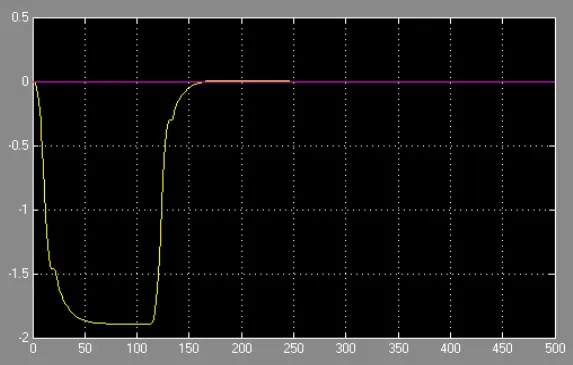
圖2 曲線(X軸為T/S,Y軸為 /°)

圖3 h曲線(X軸為T/s,Y軸為 /m)

圖4 曲線(X軸為T/S,Y軸為/°)
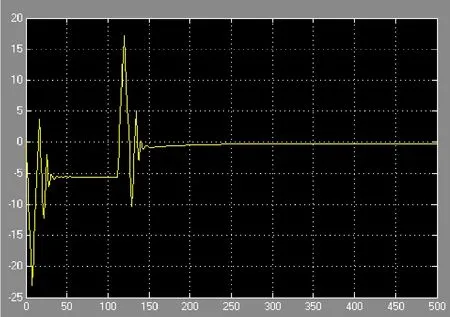
圖5 曲線(X軸為T/S,Y軸為/°)
圖1是利用MATLAB平臺進(jìn)行仿真驗(yàn)證的結(jié)構(gòu)圖。從圖2縱傾角曲線可以看出,在到達(dá)轉(zhuǎn)換深度之前,縱傾角能夠穩(wěn)定在,到達(dá)轉(zhuǎn)換深度之后,最終能夠回到。從圖3深度時間響應(yīng)曲線可以看出,經(jīng)過140s,深度進(jìn)入誤差允許范圍。從圖4艉舵舵角和圖5圍殼舵舵角的時間響應(yīng)曲線可以看出,艉舵在整個控制過程中只需打兩次舵,頻率很低;圍殼舵也只有在0s到40s,和112s到150s之間舵角變化打舵稍顯頻繁。
5 結(jié)論
本文采用PD控制算法研究了潛艇垂直面運(yùn)動,從仿真結(jié)果可以看出,縱傾角控制效果較好,但深度控制雖然達(dá)到了控制目標(biāo)卻不夠理想。首先,這是由于本研究只采用比例微分PD控制,而沒有引入積分項(xiàng)I,對縱傾角無法實(shí)現(xiàn)無差控制,下潛深度不能一直保持在理想深度上,造成最終深度會有緩慢的變化。其次,研究過程中發(fā)現(xiàn),在控制潛艇垂直面運(yùn)動時,如果控制器設(shè)計(jì)中加入深度誤差信號,單純對比例微分PD參數(shù)進(jìn)行調(diào)試是達(dá)不到理想的控制效果。若按照常用的垂直面運(yùn)動PD控制方法:相比較用圍殼舵控制下潛深度和艉舵控制縱傾角,雖然采用圍殼舵控制縱傾角效果會更好,但是由于無法通過引入深度誤差信號直接控制深度,因此深度的控制效果還是不夠好。接下來將會重點(diǎn)研究在圍殼舵和艉舵共同作用下,縱傾角和下潛深度都能達(dá)到理想的控制效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
