基于粒子群優(yōu)化極限學(xué)習(xí)機(jī)及電容層析成像的兩相流流型及其參數(shù)預(yù)測
2021-01-19 12:56:38張立峰朱炎峰
計(jì)量學(xué)報(bào) 2020年12期
張立峰, 朱炎峰
(華北電力大學(xué) 自動(dòng)化系, 河北 保定 071003)
1 引 言
兩相流在工業(yè)中廣泛存在,流型是兩相流的重要參數(shù),實(shí)現(xiàn)流型實(shí)時(shí)監(jiān)控對發(fā)展混流輸送,提高安全等級,完善監(jiān)督水平有著重要意義,因而,流型辨識(shí)在工業(yè)兩相流研究中占據(jù)重要地位。電容層析成像(electrical capacitance tomography, ECT)技術(shù)是一種基于電容敏感機(jī)理的過程層析成像技術(shù),由于其非侵入、可視化、結(jié)構(gòu)簡單、非輻射等優(yōu)勢受到學(xué)者廣泛關(guān)注[1~3]。目前,常見的基于ECT技術(shù)的辨識(shí)方法主要分為3種:基于成像的流型辨識(shí),該方法是通過ECT圖像重建算法實(shí)現(xiàn)流型識(shí)別;基于數(shù)據(jù)特征的流型辨識(shí),主要是應(yīng)用統(tǒng)計(jì)學(xué)的方法觀測不同流型的數(shù)據(jù)特性規(guī)律進(jìn)行辨識(shí);基于神經(jīng)網(wǎng)絡(luò)的流型辨識(shí),該方法是將大量ECT采集到的數(shù)據(jù)與對應(yīng)流型進(jìn)行訓(xùn)練,建立合適的網(wǎng)絡(luò)結(jié)構(gòu),從而對未知流型進(jìn)行辨識(shí)[4,5]。相較而言,通過神經(jīng)網(wǎng)絡(luò)的方法進(jìn)行流型辨識(shí)可以近似完成復(fù)雜的映射關(guān)系,預(yù)測結(jié)果也最為準(zhǔn)確。極限學(xué)習(xí)機(jī)(extreme learning machine, ELM)是一種前饋神經(jīng)網(wǎng)絡(luò),該算法具有優(yōu)秀的泛化能力和學(xué)習(xí)速度[6,7],但由于其隨機(jī)給定的輸入權(quán)重和隱含層偏差導(dǎo)致該算法極不穩(wěn)定,因此有學(xué)者嘗試使用各種算法對ELM進(jìn)行優(yōu)化[8~11]。
目前已有的ECT流型辨識(shí)技術(shù),通常只對流型進(jìn)行分類辨識(shí),但在實(shí)際工業(yè)生產(chǎn)過程中,亦需流型參數(shù)信息。本文針對這一問題,首先基于粒子群(particle swarm optimization, PSO)優(yōu)化的極限學(xué)習(xí)機(jī)算法對流型進(jìn)行辨識(shí)研究,再使用粒子群優(yōu)化極限學(xué)習(xí)機(jī)(particle swarm optimization extreme learning machine, PSO-ELM)算法對流型參數(shù)進(jìn)行預(yù)測,并與ELM算法預(yù)測結(jié)果進(jìn)行了比較分析。
2 理論基礎(chǔ)
2.1 電容層析成像技術(shù)原理
ECT系統(tǒng)主要分為3部分:電容傳感器單元,數(shù)據(jù)采集單元和圖像重建單元[3],如圖1所示。不同介質(zhì)對應(yīng)的介電常數(shù)不同,所以當(dāng)管道內(nèi)的介質(zhì)濃度和位置發(fā)生改變時(shí),場內(nèi)混流等價(jià)介電常數(shù)也隨之發(fā)生變化,使其電容值也發(fā)生改變。ECT系統(tǒng)就是通過不同的電容值對管道內(nèi)介質(zhì)進(jìn)行重建。本文使用的ECT系統(tǒng)的電容傳感器為12電極傳感器,每個(gè)流型對應(yīng)66個(gè)獨(dú)立測量電容值。
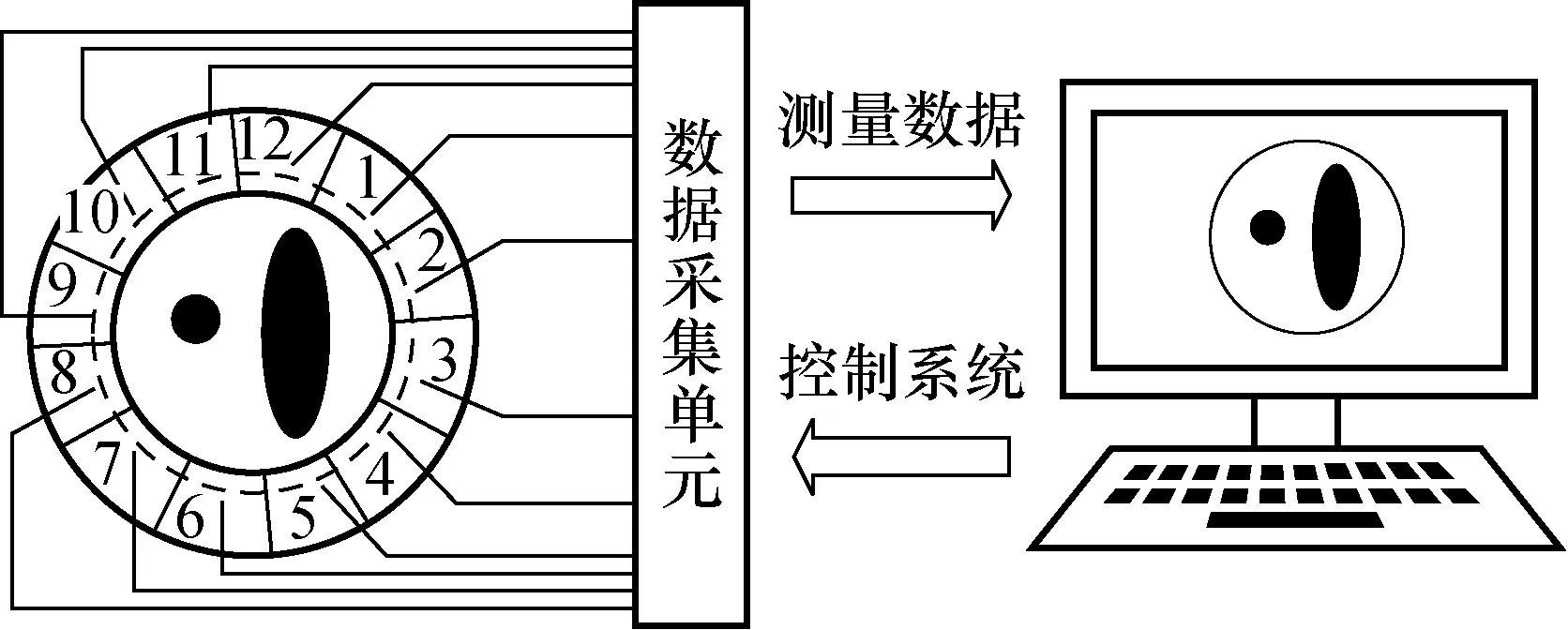
圖1 ECT系統(tǒng)結(jié)構(gòu)圖Fig.1 Structure diagram of ECT system
2.2 極限學(xué)習(xí)機(jī)算法
對于N個(gè)任意不同的樣本(xi,ti),其中,xi=[xi1,xi2,xi3,…,xin]T∈Rn,ti=[ti1,ti2,ti3,…,tim]T∈Rm,定義一個(gè)隱層節(jié)點(diǎn)數(shù)為,激活函數(shù)為g(x)的SLFNs的數(shù)學(xué)模型為[6~7]:
(1)
式中:j=1,…,N;wi=[wi1,wi2,…,win]T為連接輸入層和第i個(gè)隱層節(jié)點(diǎn)的權(quán)重;βi=[βi1,βi2,…,βim]T為連接輸出層和第i個(gè)隱層節(jié)點(diǎn)的權(quán)重;bi為第i個(gè)隱層節(jié)點(diǎn)的閾值;wi·xj為wi和xj的內(nèi)積;oj為前饋神經(jīng)網(wǎng)絡(luò)的輸出值;g(x)可選為Sigmoid函數(shù)或徑向基函數(shù)等。
(2)
將式(2)簡寫為:
Hβ=T
(3)
式中:H為神經(jīng)網(wǎng)絡(luò)隱層的輸出矩陣,H的第i列為受輸入x1,…,xN輸入所影響的第個(gè)隱層節(jié)點(diǎn)的輸出。
根據(jù)ELM理論,在g(x)無限可微的條件下,wi和bi可隨機(jī)選取。ELM開始學(xué)習(xí)后,wi和bi不作任何調(diào)整,即H保持不變。在一般情況下,隱層節(jié)點(diǎn)數(shù)量遠(yuǎn)小于訓(xùn)練樣本數(shù)量,即?N,導(dǎo)致矩陣H不是方陣,亦或有不存在βi使得Hβ=T成立的可能,將導(dǎo)致H不可逆。因而,將上述線性系統(tǒng)的極小范數(shù)最小二乘解改寫為:
(4)
式中H?為矩陣H的Moore-Penrose廣義逆矩陣。
2.3 粒子群優(yōu)化算法
粒子群優(yōu)化算法是一種受鳥類捕食活動(dòng)啟發(fā)而創(chuàng)造的優(yōu)化算法。PSO算法首先在可行解中初始化一群粒子,每個(gè)粒子代表極值優(yōu)化問題的潛在最優(yōu)解,粒子特征由3個(gè)指標(biāo)表示:位置,速度和適應(yīng)度值。粒子在解空間中活動(dòng),并通過跟蹤個(gè)體極值Pbest和種群極值Gbest來更新各個(gè)體位置。個(gè)體極值Pbest是在個(gè)體經(jīng)歷的位置中計(jì)算的適應(yīng)度值的最佳位置。群體極值Gbest指的是搜索中所有粒子的適應(yīng)度的最佳位置。每次更新粒子時(shí),計(jì)算適應(yīng)值一次,并通過比較新粒子的適應(yīng)度值與個(gè)體極值和群體的適應(yīng)度值來更新個(gè)體極值Pbest和群體極值Gbest位置[12~14]。
在D維空間中,由n個(gè)粒子構(gòu)成的種群X=[X1,X2,…,Xn],其中第i個(gè)粒子的位置為Xi=[Xi1,Xi2,…,XiD]T。將Xi帶入適應(yīng)度函數(shù)f(Xi)中計(jì)算出適應(yīng)度值粒子位置Fitness。第i個(gè)粒子的速度為Vi=[vi1,vi2,…,viD]T,其中粒子i的個(gè)體極值為Pi=[Pi1,Pi2,…,PiD]T,種群的全局極值為Pg=[Pg1,Pg2,…,PgD]T。
在每一次迭代過程中,粒子通過個(gè)體極值和群體極值更新自身的速度和位置,更新公式:
(5)
式中:ω為慣性權(quán)重,調(diào)節(jié)最優(yōu)解搜索范圍;d=1,2,…,D,i=1,2,…,n,其中,n為種群大小;k為當(dāng)前迭代次數(shù);Vid為粒子速度;c1,c2(非負(fù)常數(shù))為加速因子;r1,r2為2個(gè)隨機(jī)數(shù),取值范圍為(0,1),以此來實(shí)現(xiàn)隨機(jī)搜索;通常情況下,為了防止粒子盲目搜索,會(huì)將其位置和速度分別限制在[-Xmax,Xmax]和[-Vmax,Vmax]范圍內(nèi)。
2.4 粒子群優(yōu)化極限學(xué)習(xí)機(jī)
由于ELM算法中的wi和bi隨機(jī)選取,將會(huì)造成網(wǎng)絡(luò)結(jié)構(gòu)不穩(wěn)定,存在輸入權(quán)值和隱層閾值為0的情況,將導(dǎo)致部分隱層節(jié)點(diǎn)失效等問題。本文使用粒子群優(yōu)化極限學(xué)習(xí)機(jī)算法,通過粒子群算法尋找合適的輸入層權(quán)重和隱含層偏差,從而得到最優(yōu)的ELM網(wǎng)絡(luò)[15~16]。
PSO-ELM算法步驟如下:
1) 初始化粒子群算法的參數(shù),主要包括:粒子群N,最大迭代次數(shù)tmax,c1=c2=2。
2) 設(shè)定隱含層神經(jīng)元個(gè)數(shù)的值以及參數(shù)范圍,從而構(gòu)建ELM網(wǎng)絡(luò)結(jié)構(gòu)。
3) 根據(jù)w、β和b初始化粒子群,并確定粒子自身和群體的歷史最優(yōu)位置。
4) 將粒子群進(jìn)行解碼,得到w、β和b,計(jì)算訓(xùn)練樣本的輸出,k=1,2,…,n,n為訓(xùn)練樣本的數(shù)量,并計(jì)算粒子群的適應(yīng)度值。
5) 更新粒子飛行的權(quán)值、粒子群飛行的速度和位置。
6) 將每一個(gè)粒子的位置與粒子自身和群體的歷史最優(yōu)位置進(jìn)行對比;如果更優(yōu),就更新相應(yīng)的位置。
7) 更新當(dāng)前迭代次數(shù)的數(shù)值,若當(dāng)前迭代次數(shù)小于tmax時(shí),則返回3)繼續(xù)迭代。
8) 根據(jù)種群最優(yōu)粒子位置得到ELM網(wǎng)絡(luò)參數(shù)w、β和b,并建立的網(wǎng)絡(luò)模型。
3 基于PSO-ELM的流型辨識(shí)
3.1 仿真條件及模型建立
本文選取油-氣兩相流為研究對象進(jìn)行仿真實(shí)驗(yàn),油相和氣相的相對介電常數(shù)分別設(shè)置為3和1;采用12電極ECT傳感器,其獨(dú)立電容測量值的數(shù)量為66。以管道內(nèi)半徑為基準(zhǔn),進(jìn)行無量綱化建模仿真。通過課題組編制的基于MATLAB的ECT仿真軟件包進(jìn)行傳感器網(wǎng)格剖分、ECT正問題計(jì)算以及電容值的仿真計(jì)算。管內(nèi)成像區(qū)域剖分網(wǎng)格如圖2所示,管內(nèi)剖分為12層,共計(jì)1 728個(gè)像素單元。
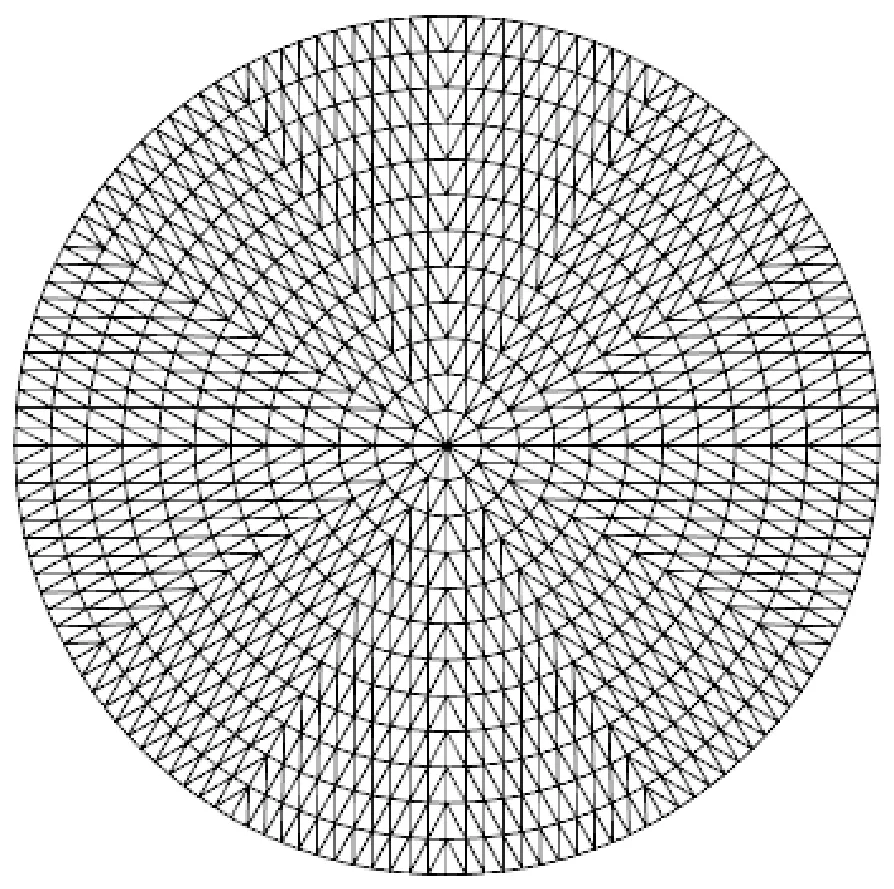
圖2 管內(nèi)成像區(qū)域剖分圖Fig.2 Dissection diagram of the in-pipe imaging field
本文對4種典型流型進(jìn)行了辨識(shí)研究,分別為:核心流、環(huán)流、高位層流及低位層流,如圖3所示。通過ECT仿真軟件包對每種流型設(shè)置200個(gè)樣本,并計(jì)算其對應(yīng)的電容測量值,4種流型共計(jì)800個(gè)樣本。本文基于隨機(jī)的思想建立4種流型,即核心流隨機(jī)生成流型半徑r;環(huán)流隨機(jī)生成環(huán)流寬度d;高位層流和低位層流分別隨機(jī)生成液位高度h1和h2,以使流型具有統(tǒng)計(jì)意義上的代表性。
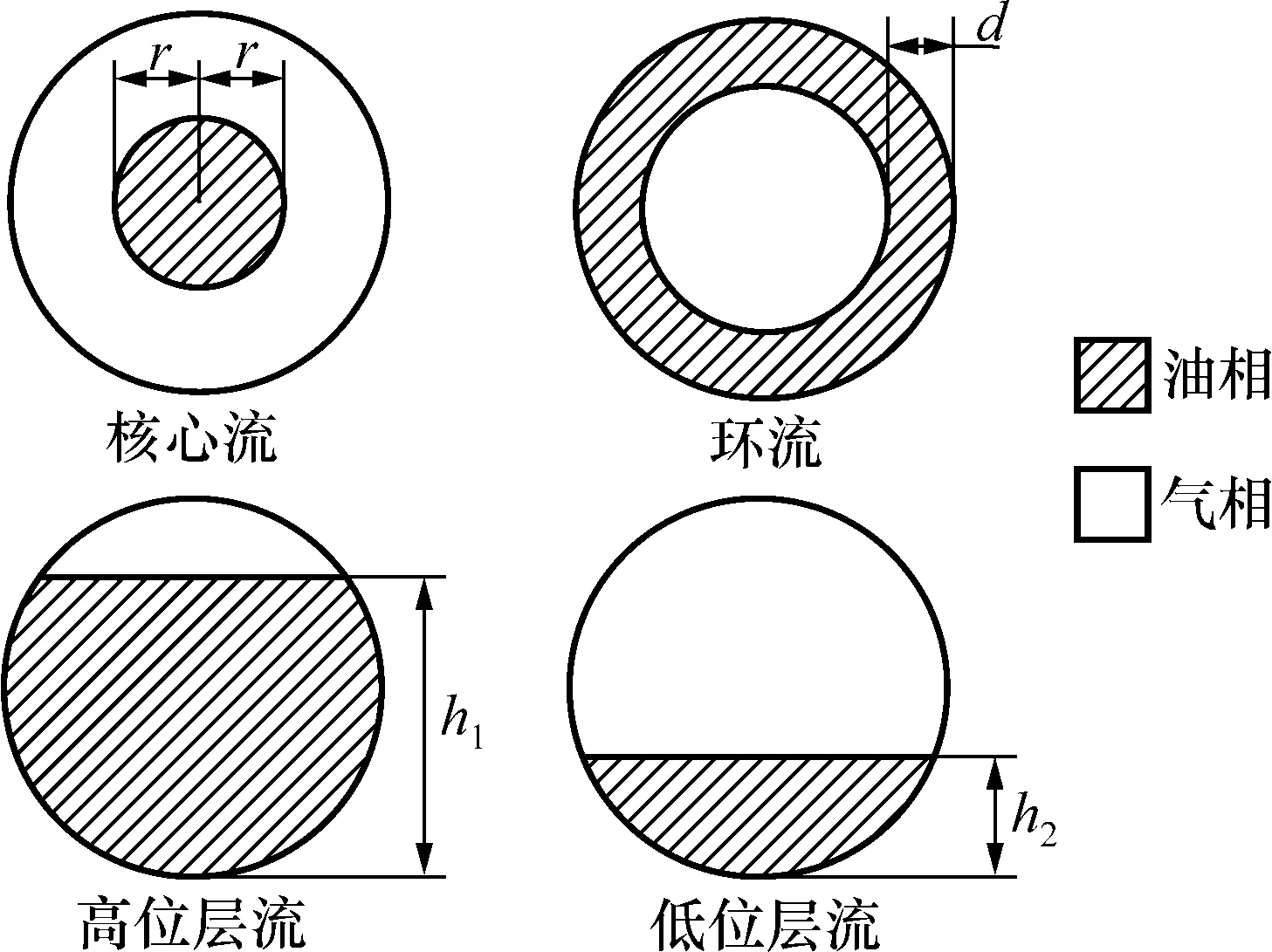
圖3 典型流型Fig.3 Typical flow regime
3.2 流型辨識(shí)
從800個(gè)仿真樣本中隨機(jī)選取600個(gè)樣本作為PSO-ELM算法的訓(xùn)練樣本,剩下的200個(gè)樣本作為測試樣本。各樣本對應(yīng)的66個(gè)仿真電容值作為網(wǎng)絡(luò)輸入,流型類型作為網(wǎng)絡(luò)輸出,4種流型對應(yīng)絡(luò)輸出值分別為1,2,3及4。
訓(xùn)練過程中,不斷增加PSO-ELM隱層節(jié)點(diǎn)以觀察其預(yù)測效果,并與相同隱層節(jié)點(diǎn)數(shù)下ELM算法的預(yù)測結(jié)果進(jìn)行比較;訓(xùn)練結(jié)束后,使用測試樣本對其辨識(shí)效果進(jìn)行檢驗(yàn),其流型正確辨識(shí)率結(jié)果如圖4所示。

圖4 測試樣本的流型正確辨識(shí)率Fig.4 Correct identification rate for test samples
由圖4可見,PSO-ELM算法在2個(gè)隱層節(jié)點(diǎn)時(shí),即可對4類流型進(jìn)行100%正確辨識(shí),而ELM算法在10個(gè)隱層節(jié)點(diǎn)時(shí)首次達(dá)到100%正確辨識(shí),由此可見,PSO-ELM算法預(yù)測效果明顯優(yōu)于ELM算法;此外,當(dāng)PSO-ELM算法的隱層節(jié)點(diǎn)數(shù)從2增加到15的過程中,其正確辨識(shí)率均為100%,而ELM算法正確辨識(shí)率出現(xiàn)上下波動(dòng)。
綜上所述,PSO-ELM與ELM算法相比,可在更為簡潔的網(wǎng)絡(luò)結(jié)構(gòu)下,獲得更為穩(wěn)定及更高精度的辨識(shí)效果。
4 基于PSO-ELM的流型參數(shù)預(yù)測
在流型辨識(shí)的基礎(chǔ)上,基于PSO-ELM算法進(jìn)行
了流型位置參數(shù)的預(yù)測,位置參數(shù)為:核心流半徑r;環(huán)流的流體寬度d;高位層流及低位層流的液位高度h1及h2。
本文將4種流型對應(yīng)的電容值以及流型位置參數(shù)分別作為各種流型參數(shù)預(yù)測網(wǎng)絡(luò)的輸入和輸出,隨機(jī)選取每種流型的150個(gè)樣本作為訓(xùn)練樣本,剩下的50個(gè)樣本作為測試樣本。本文選取均方誤差(MSE)和決定系數(shù)(R2)作為流型位置參數(shù)預(yù)測的評價(jià)指標(biāo),其定義為:
(6)
(7)

MSE越接近于0,表明預(yù)測參數(shù)越接近于實(shí)際流型參數(shù);R2越接近于1,表明預(yù)測效果越好。
PSO-ELM在不同隱層節(jié)點(diǎn)數(shù)下各種流型位置參數(shù)預(yù)測效果如表1及表2所示。表中ELM算法在隱層節(jié)點(diǎn)數(shù)為N時(shí)記為ELM-N(如:ELM-1,ELM-2,…),PSO-ELM算法在隱層節(jié)點(diǎn)數(shù)為N時(shí)記為PSO-ELM-N(如:PSO-ELM-1,PSO-ELM-2,…)。
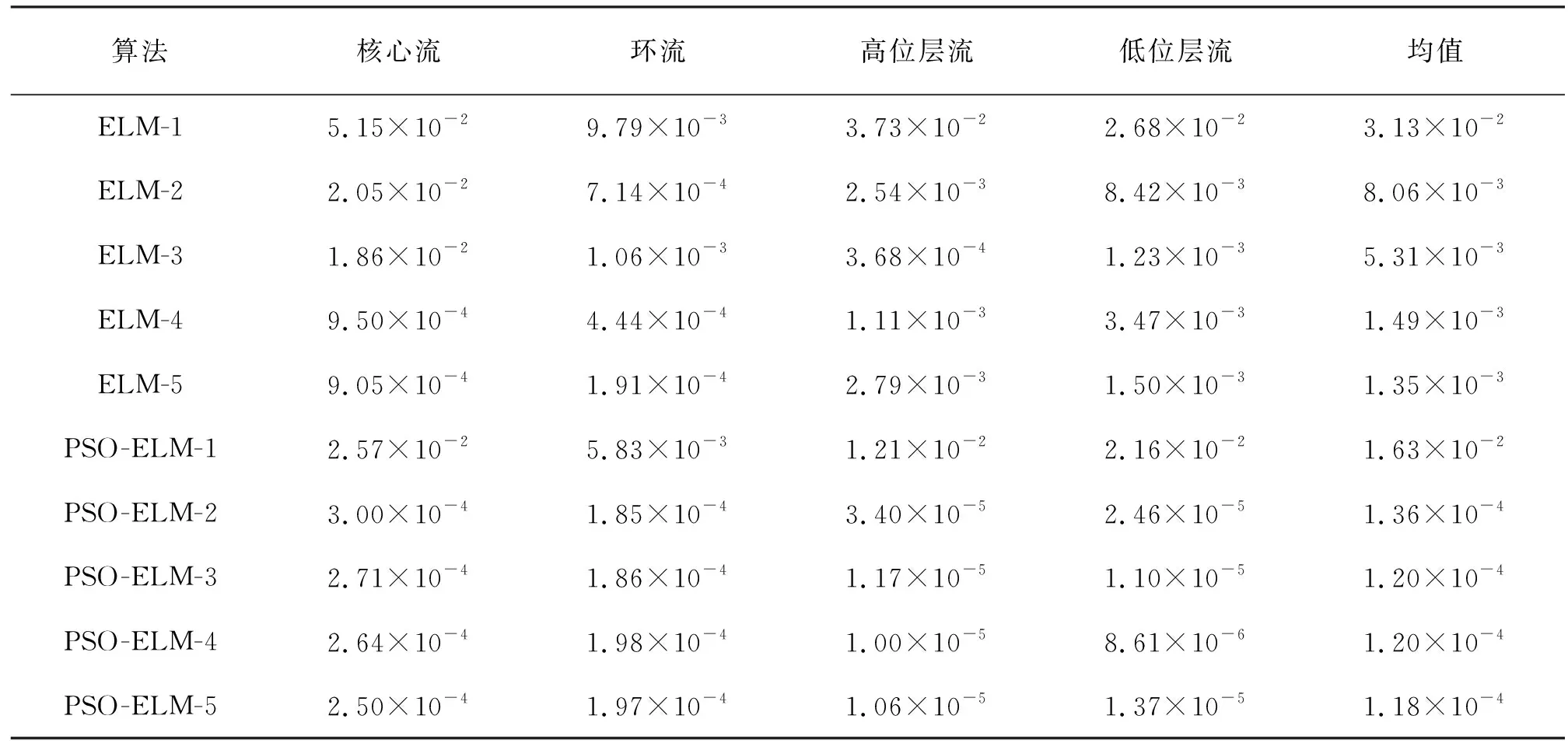
表1 不同隱層節(jié)點(diǎn)下的均方誤差Tab.1 Mean Square Error of different hidden layer nodes
從表1和表2可知,PSO-ELM算法較ELM算法參數(shù)預(yù)測結(jié)果的MSE在隱層節(jié)點(diǎn)數(shù)大于1時(shí)相差1個(gè)量級;在相同隱層節(jié)點(diǎn)數(shù)下,PSO-ELM算法R2更接近1,表明PSO-ELM算法預(yù)測精度更高。為檢驗(yàn)PSO-ELM及ELM算法的參數(shù)預(yù)測結(jié)果,對所研究的4種流型,分別隨機(jī)選取5個(gè)樣本,隱層節(jié)點(diǎn)數(shù)取為3,其預(yù)測結(jié)果如表3所示。由表3可知,在相同的隱層節(jié)點(diǎn)數(shù)下,PSO-ELM算法的參數(shù)預(yù)測結(jié)果相較于ELM算法預(yù)測結(jié)果更接近于實(shí)際值,其最大相對誤差為5.24%。
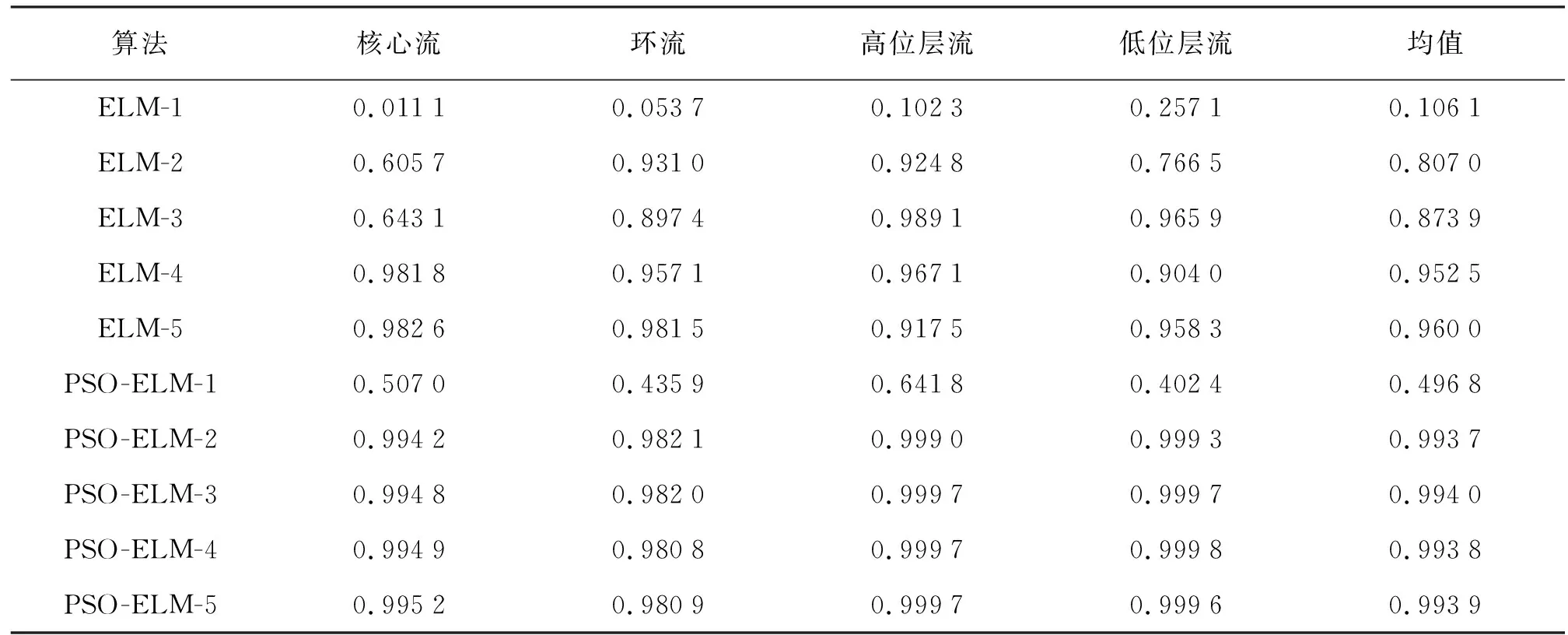
表2 不同隱層節(jié)點(diǎn)下的決定系數(shù)Tab.2 Determination coefficients of different hidden layer nodes

表3 預(yù)測結(jié)果Tab.3 Prediction results
5 結(jié) 論
1) 使用粒子群算法優(yōu)化極限學(xué)習(xí)機(jī)和電容層析成像技術(shù)對4種典型流型進(jìn)行流型辨識(shí)和特征預(yù)測,仿真實(shí)驗(yàn)結(jié)果表明:PSO-ELM算法較ELM算法可在更少的隱層節(jié)點(diǎn)下準(zhǔn)確辨識(shí)流型及進(jìn)行流型參數(shù)預(yù)測;
2) 本文以水平管4種典型流型為例,進(jìn)行了基于PSO-ELM方法進(jìn)行流型辨識(shí)與特征參數(shù)預(yù)測的初步研究,對于豎直、傾斜管流,從理論上來說,該方法同樣適用;
3) 以中心流為例,隱層節(jié)點(diǎn)數(shù)為3時(shí),PSO-ELM算法的流型辨識(shí)及流型參數(shù)預(yù)測時(shí)間分別為0.005 9 s及0.022 7 s。因此,該算法可以在線使用,實(shí)現(xiàn)流型及其參數(shù)的實(shí)時(shí)辨識(shí)及預(yù)測。
[參考文獻(xiàn)]
[1] 張立峰. 壓縮感知在電容層析成像中的應(yīng)用 [J]. 北京航空航天大學(xué)學(xué)報(bào), 2017, 43(11): 2316-2321.
Zhang L F. Compressed sensing application to electrical capacitance tomography [J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2017, 43(11): 2316-2321.
[2] 張立峰, 宋亞杰. 基于梯度投影稀疏重建算法的電容層析成像圖像重建 [J]. 計(jì)量學(xué)報(bào), 2019, 40(4): 631-635.
Zhang L F, Song Y J. Image Reconstruction for Electrical Capacitance Tomography Based on Barzilai-Borwein Gradient Projection for Sparse Reconstruction Algorithm[J].ActaMetrologicaSinica, 2019, 40(4): 631-635.
[3] Meribout M, Saied I M. Real-Time Two-Dimensional Imaging of Solid Contaminants in Gas Pipelines Using an Electrical Capacitance Tomography System [J].IEEETransactionsonIndustrialElectronics, 2017, 64(5): 3989-3996.
[4] 孔銀. 電容層析成像技術(shù)圖像重建算法的研究[D]. 哈爾濱:哈爾濱理工大學(xué), 2017.
[5] 張立峰, 王化祥. 基于SVM及電容層析成像的兩相流流型識(shí)別 [J]. 儀器儀表學(xué)報(bào), 2009, 30(4): 812-816.
Zhang L F, Wang H X. Identification of two-phase flow regime based on support vector machine and electrical capacitance tomography technique [J].ChineseJournalofScientificInstrument, 2009, 30(4): 812-816.
[6] Huang G B, Zhu Q Y, Siew C H. Extreme learning machine: a new learning scheme of feedforward neural networks [J].IEEEInternationalJointConferenceonNeuralNetworks, 2004, 2: 985-990.
[7] Huang G B, Zhu Q Y, Siew C H. Extreme learning machine: Theory and applications [J].Neurocomputing, 2006, 70(1): 489-501.
[8] 何群, 王紅, 江國乾, 等. 基于相關(guān)主成分分析和極限學(xué)習(xí)機(jī)的風(fēng)電機(jī)組主軸承狀態(tài)監(jiān)測研究 [J]. 計(jì)量學(xué)報(bào), 2019, 39(1): 89-93.
He Q, Wang H, Jiang G Q,etal. Research of Wind Turbine Main Bearing Condition Monitoring Based on Correlation PCA and ELM [J].ActaMetrologicaSinica, 2018, 39(1): 89-93.
[9] 吳忠強(qiáng),尚夢瑤,申丹丹,等. 基于BSA-RELM的純電動(dòng)汽車鋰離子電池SOC估計(jì)[J]. 計(jì)量學(xué)報(bào), 2019, 40(4): 693-699.
Wu Z Q, Shang M Y, Shen D D,etal. Estimation of SOC of Li-ion Battery in Pure Electric Vehicle by BSA-RELM[J].ActaMetrologicaSinica, 2019, 40(4): 693-699.
[10] 毛羽, 毛力, 楊弘, 等. 改進(jìn)人工蜂群優(yōu)化的極限學(xué)習(xí)機(jī) [J]. 傳感器與微系統(tǒng), 2018, 37(4): 116-120.
Mao Y, Mao L, Yang H,etal. Extreme learning machine optimized by improved ABC [J].TransducerandMicrosystemTechnologies, 2018, 37(4): 116-120.
[11] Chu Z, Ye M, Jing C. Adaptive reactionless control strategy via the PSO-ELM algorithm for free-floating space robots during manipulation of unknown objects [J].NonlinearDynamics, 2018, 91(2): 1321-1335.
[12] Chatterjee S, Sarkar S, Hore S,etal. Particle swarm optimization trained neural network for structural failure prediction of multistoried RC buildings [J].NeuralComputing&Applications, 2017, 28(8): 2005-2016.
[13] Bonyadi M R, Michalewicz Z. Particle Swarm Optimization for Single Objective Continuous Space Problems: A Review [J].EvolutionaryComputation, 2017, 25(1): 1-54.
[14] 劉彬, 趙朋程, 高偉, 等. 基于粒子群算法與連續(xù)型深度信念網(wǎng)絡(luò)的水泥熟料游離氧化鈣預(yù)測 [J]. 計(jì)量學(xué)報(bào), 2018, 39(3): 134-138.
Liu B, Zhao P C, Gao W,etal. Prediction of Cement fCaO Based on Particle Swarm Optimization and Continuous Deep Belief Network [J].ActaMetrologicaSinica, 2018, 39(3): 134-138.
[15] 李婉華, 陳羽中, 郭昆, 等. 基于改進(jìn)粒子群優(yōu)化的并行極限學(xué)習(xí)機(jī) [J]. 模式識(shí)別與人工智能, 2016, 29(9): 840-849.
Li W H, Chen Y Z, Guo K,etal. Parallel Extreme Learning Machine Based on Improved Particle Swarm Optimization [J].PatternRecognitionandArtificialIntelligence, 2016, 29(9): 840-849.
[16] 高斐, 李洪儒, 許葆華. 基于ICPSO優(yōu)化的極限學(xué)習(xí)機(jī)在故障診斷中的應(yīng)用 [J]. 中國機(jī)械工程, 2013, 24(20): 2753-2757.
Gao F, Li H R, Xu B H. Applications of Extreme Learning Machine Optimized by ICPSO in Fault Diagnosis [J].ChinaMechanicalEngineering, 2013, 24(20): 2753-2757.
