附加視線向量修正的衛星影像區域網平差
2021-01-18 00:59:14張永生賴廣陵
測繪學報 2021年1期
伍 洋,張永生,李 凱,于 英,賴廣陵
信息工程大學地理空間信息學院,河南 鄭州 450001
高分辨率光學衛星影像的高精度幾何定位能力是其得到充分利用的關鍵,也是攝影測量領域一直以來研究的熱點。傳統有理函數模型(rational function model,RFM)作為一種替代嚴密幾何模型的通用成像模型,以其獨立于傳感器、形式簡單、保密性強等優點,已經成為遙感影像發布的基本幾何模型,在實際使用中得到了廣泛應用[1]。然而,RFM本質上仍然是對嚴密幾何模型的一種數學擬合,衛星成像過程中姿態和軌道的測量誤差會導致采用RFM直接定位存在明顯系統誤差。
針對這種情況,目前常用的技術手段是在像方或者物方構建系統誤差補償模型,在平差過程中求解模型參數,從而實現對影像幾何定位誤差的修正與補償。補償模型的目的是對影像存在的系統誤差進行吸收,根據模型的不同,主要分為:平移模型、平移+比例模型、仿射模型、多項式模型。其中,平移模型具有形式簡單、適用性廣的特點[1-3];平移+比例模型在平移模型的基礎上添加了一個比例系數來吸收姿態漂移造成的誤差[4-5];仿射模型目前應用最為廣泛,可以獲得比平移模型、平移+比例模型更高的補償精度[6-11]。文獻[12—13]在對多種模型進行深入討論的基礎上,還對模型引入的近似條件及誤差進行了分析。文獻[14—15]對多項式模型的補償效果進行研究,得到了很好的試驗結果,但由于內外方位元素相關性以及模型參數過多,需要大量控制點數據。此外,文獻[16]根據薄板平滑樣條函數構建誤差補償模型,利用其良好的擬合性和靈活性修正ZY-3影像存在的系統誤差。
以上所述方法盡管模型存在差異,補償效果也不盡相同,但從原理上看,這些模型本質上都是對物方或者像方殘差的近似擬合。為避免建模空間單一,模型存在近似的問題,文獻[17—18]探討了利用RFM模型恢復影像嚴密幾何模型的方法,但該方法需要準確的初值,且無法解決線、角元素強相關造成的求解不穩定;文獻[19]在分析嚴密幾何成像模型和有理函數模型的基礎上,提出了一種適用范圍更廣的抽象幾何成像模型;文獻[20—21]提出了一套“恢復-補償-生成”的策略用于提升影像定位精度,取得了一定的效果,但整個處理過程略顯煩瑣,必須將需要優化的所有影像處理完成后才能采用區域網平差的方式進行幾何定位。盡管有不少方法上的創新成果,但從處理數據類型的角度來看,目前已有的研究都針對測繪衛星數據進行,關于非測繪衛星數據處理的研究成果較少。原因是非測繪衛星影像數據通常并不符合立體測圖條件,普遍存在姿態角誤差大、影像視場角大、重疊影像交會角小等情況。而傳統區域網平差能夠有效進行的前提就是立體測圖條件良好,這極大地限制了衛星影像的應用率。盡管目前針對單一的弱交會影像定位問題,有一些研究成果[22-24],但其能夠有效進行的基礎是輔助DEM數據的支持,并且存在高程坐標依賴于所采用的DEM數據精度的技術缺陷。綜上所述,針對傳統區域網平差有效進行存在的限制條件,有必要發展一種能夠擴展影像使用類型的通用系統誤差補償方法。鑒于此,本文提出了一種附加視線向量修正的衛星影像區域網平差方法。該方法從成像光線的視線向量出發,將傳統策略從對殘差建模變換為對產生系統誤差的原因建模,從而規避傳統方法受限于窄視場角相機、高精度姿軌觀測系統以及良好交會角的限制。
1 傳統區域網平差模型的局限性
傳統區域網平差方法首先在RFM基礎上建立像方或物方的誤差補償模型,然后根據控制點和連接點坐標構建誤差方程,最后利用最小二乘方法求解誤差補償參數和連接點物方坐標。在整個區域網平差過程中,關鍵步驟在于系統誤差補償模型的構建。目前的通用模型是仿射變換模型,僅僅是對窄視場角相機(視場角小于5°)、平臺軌道和姿態測量誤差比較小(小于2″)的情況下的近似[6]。當參與平差的影像不滿足這種近似條件時,采用該方法就不能有效處理。下面對外方位元素誤差造成像點在物方空間的坐標移位進行具體分析,闡述傳統區域網平差模型的局限性。
衛星成像時刻外方位元素包括3個線元素和3個角元素(俯仰、滾動、偏航),其中以滾動角誤差對定位產生的影響最為復雜,如圖1所示。
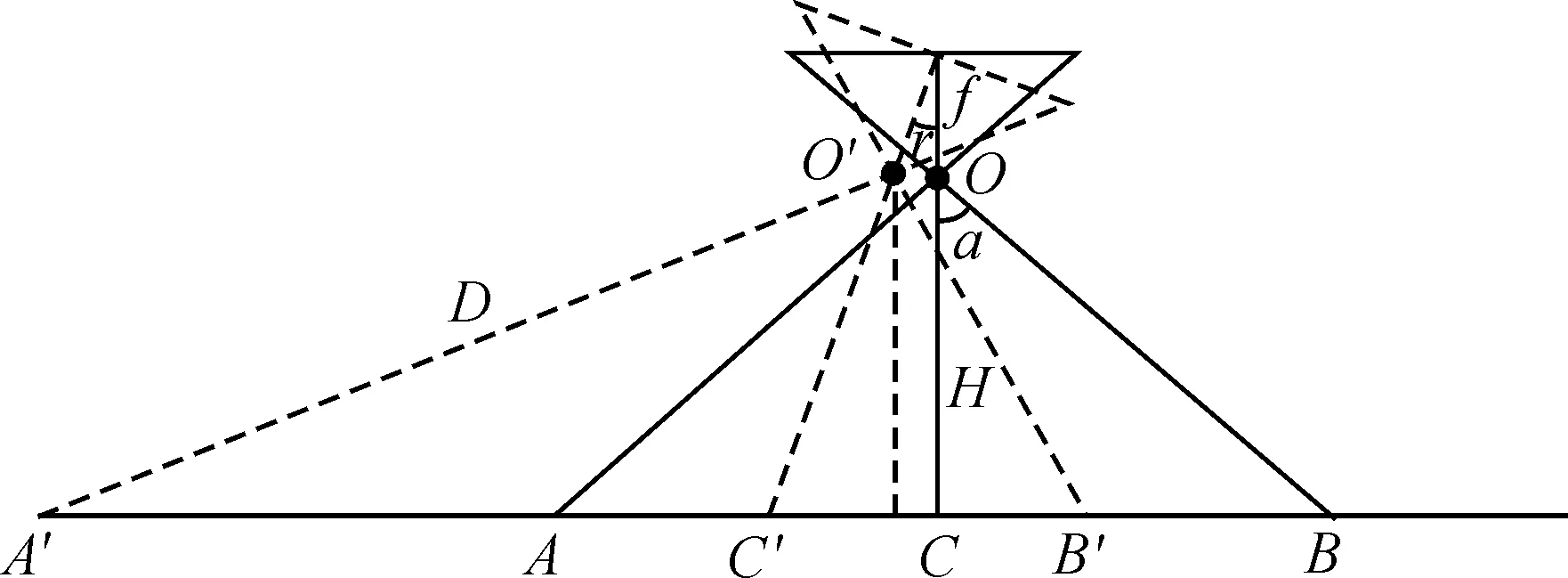
圖1 滾動角誤差對幾何定位影響Fig.1 Influence of roll angle error on geometric positioning
圖1中,點O是光學系統中心;C為光學系統在焦平面上的主點;OC為主距f;a、b是CCD兩端點;∠AOB為相機視場角;α為半視場角。A′A和C′C的距離之差即表示由滾動角誤差引起的地面點偏移在視場中心和邊緣的差異。
假設滾動角誤差為r,成像時相機側擺角為c。根據圖1所示的幾何關系,可以計算得到
A′A=A′C-AC=H·tan(c+α+r)+
f·tanr-H·tan(c+α)
(1)
C′C=(H+f)·tan(c+r)-(H+f)·tanc
(2)
因此,視場中心和邊緣的差值Δ可以表示為
Δ=A′A-C′C=H·[tan(c+α+r)+
tanc-tan(c+α)-tan(c+r)]+
f·[tanr+tanc-tan(c+r)]
(3)
由式(3)可以看出,滾動角誤差造成的中心點與邊緣點的位置偏移值不一致,兩者差值與焦距、視場角、滾動角誤差以及側擺角均有關系。當該偏移值足夠大時,并不能用一個簡單的線性模型對滾動角誤差造成的影響進行有效吸收。
目前衛星平臺進行立體觀測主要有3種模式:多線陣立體模式、寬幅立體模式、機動立體模式[21]。其中,多線陣立體模式采用多視線陣載荷對同一區域成像構成立體;寬幅立體模式采用寬幅相機從異軌上分別對同一地區進行成像,成像過程不進行機動,通過寬覆蓋的重疊區域形成立體影像;機動立體模式僅采用平臺上的一個線陣載荷,通過姿態快速機動實現對同一地區不同視角的立體觀測。為了觀察中心視場和邊緣視場偏移的差值Δ隨滾動角誤差的變化情況,選取了幾種不同立體觀測模式的國產衛星,其相關傳感器參數見表1。按照式(3)計算在不同滾動角誤差情況下的數值,統計結果見圖2。
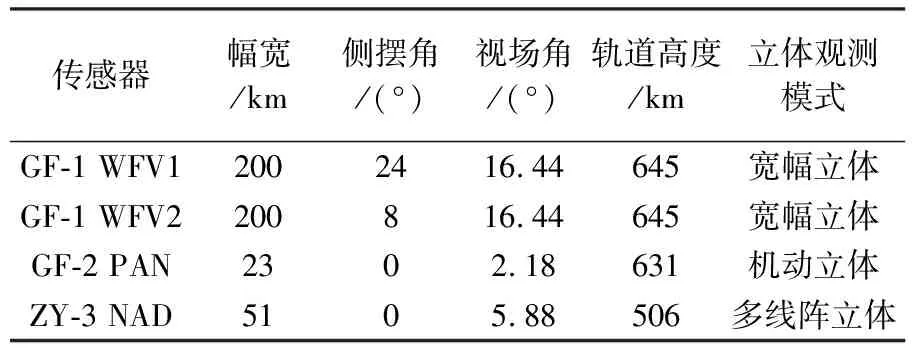
表1 典型國產光學衛星相關載荷參數
從圖2中可以看出,對于幅寬大且側擺角大的載荷,當滾動角誤差比較大時,由滾動角誤差引起的中心視場和邊緣視場的偏移差異可達到百米量級;對于幅寬小且側擺角小的載荷,由滾動角誤差引起的中心視場和邊緣視場的偏移差異相對較小。
傳統區域網平差誤差補償模型構建的假設條件是相機視場角較小,姿態角誤差較小,此時由滾動角誤差引起的中心視場和邊緣視場偏移值的差異可以認為是0,用像面平移模型即可表示由滾動角誤差造成的影響。然而,當成像條件不滿足近似假設時,對殘差結果進行建模的傳統方法則存在局限性,此時平移模型并不能有效吸收這種影響。
2 附加視線向量修正的衛星影像區域網平差
針對傳統誤差補償方法存在的技術短板,本文提出了一種適用范圍更廣的衛星影像區域網平差模型。該方法的主要思想是:首先利用RFM模型恢復衛星影像成像時的視線向量,再根據視線向量恢復出攝影時刻的虛擬外方位元素,然后對虛擬外方位元素進行誤差建模,構建新的觀測方程,最后采用最小二乘方法進行求解。其主要流程如圖3所示。

圖2 滾動角誤差引起的中心視場和邊緣視場偏移差值Fig.2 The difference of center field of view and edge field of view caused by roll angle error

圖3 附加視線向量修正的衛星影像區域網平差算法Fig.3 Satellite imagery block adjustment based on line-of-sight vector rectification
2.1 恢復虛擬外方位元素
對于任意像點p(i,j),給定兩個不相等的高程值H1和H2,結合影像的RPC參數文件,可以計算出相應的地面點大地坐標P1(X1,Y1,H1)和P2(X2,Y2,H2),根據兩點坐標可以計算出該像元的成像視線向量,如圖4所示。
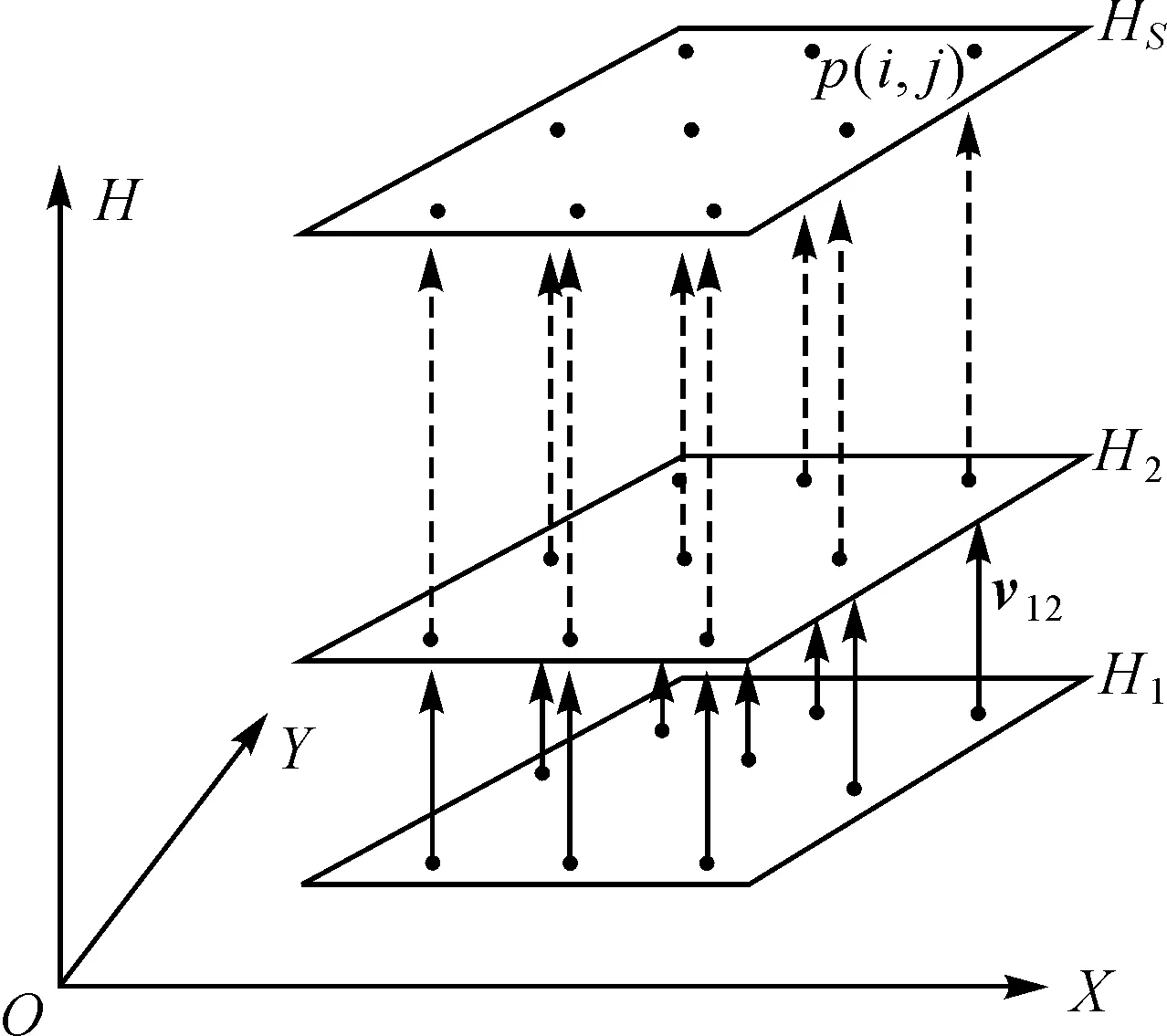
圖4 恢復視線向量Fig.4 Reconstruction of line-of-sight vector
視線向量還可以采用指向角的形式進行描述,按照這個思路,結合衛星平臺運行的軌道高度,可以恢復出成像時刻的位置信息和姿態信息,從而建立物方點與投影中心之間的對應關系,如圖5所示。由于與真實的外方位元素定義并不相同,恢復出來的位置和姿態參數稱為虛擬外方位元素。衛星在高軌道空間繞地球飛行,其軌道運行高度比較穩定,而且由軌道高度引起的定位誤差非常小[6],因此,利用軌道高度值恢復虛擬外方位元素從理論上是可行的。

圖5 恢復虛擬外方位元素Fig.5 Reconstruction of pseudo elements of exterior orientation
根據圖5所示的幾何關系,可以計算得到
(4)
(5)
式中,(ψX,ψY)表示視線向量在大地坐標系下的指向角,HS表示衛星平臺運行的軌道高度。
攝影中心和物方點之間的關系還需要一個旋偏角來進行描述,將其表示為ψZ,對于高分辨率衛星,其值比較小,可以將它的初值設為0。至此,描述攝影中心和物方點之間對應關系的虛擬外方位元素(XS,YS,Hs,ψX,ψY,ψZ)已完全恢復。從幾何意義上對恢復的虛擬外方位元素進行分析,其3個線元素代表的是成像時刻傳感器的經度、緯度和大地高,3個角元素表示成像光線在大地坐標系下的指向角以及投影中心和物方點之間的旋偏角。雖然與真實的外方位元素表示方式存在區別,但其本質都是為了描述傳感器成像時刻的位置和姿態。
2.2 構建誤差方程
對于任一控制點或連接點,根據圖5所示的幾何關系,可建立以虛擬外方位元素描述的成像方程如下

(6)

消去式(6)中的比例因子λ,得到控制點或連接點的觀測方程為
(7)
根據視線向量和軌道高度恢復的虛擬外方位元素并不準確,還需要對其進行誤差建模
(8)

(9)
式中,ai、bi、ci、di、ei、fi(i=0,1,2)是多項式系數;sample、line是像點坐標。
將式(8)和式(9)代入式(7)后進行線性化處理,可以得到附加視線向量修正的區域網平差誤差方程式的矩陣形式
V=AX1+BX2-L
(10)
式中,X1表示多項式參數的改正數向量;X2表示地面點坐標的改正數向量;A和B分別表示對應未知數X1和X2的系數矩陣;V表示觀測值殘差向量;L表示觀測值向量。
按照式(10)列出誤差方程后,采用邊法化邊消元的方法先解算出虛擬外方位元素補償模型參數,然后按照式(7)求解地面點坐標,整個過程迭代進行直到未知數改正數小于設定閾值。
3 試驗與分析
3.1 試驗數據與方案設計
為充分驗證本文算法的有效性,采用模擬數據和真實數據對模型參數以及算法性能進行全面試驗,此外,還進行了相同配置下的傳統區域網平差試驗,以更好地對比傳統方法和本文方法的差異。
生成模擬數據的原始數據為覆蓋美國華盛頓地區的1景資源三號(ZY-3)三線陣立體影像,獲取時間為2012年5月,該地區地勢平坦,高程范圍為0~150 m。該套數據附帶可構建嚴密幾何模型的星歷數據文件,試驗中將其作為原始數據生成一系列模擬數據進行仿真試驗。仿真試驗的基本思路是,首先根據星歷數據文件構建以歐拉角表示的嚴格幾何模型,再通過在外方位元素上添加不同大小的系統誤差生成一系列帶誤差的模擬數據,然后分別采用傳統方法和本文方法進行系統誤差補償。仿真試驗采用的控制點由原始數據生成,具體做法是:在影像像面上按照1000像素的采樣間隔選取一個像點,根據原始星歷數據將采樣點解算到測區平均高程面上,得到像點對應的物方坐標。
真實數據選取覆蓋兩種不同地貌區域,且包含不同立體觀測模式的多套數據進行試驗。兩塊試驗區域分別為河南省嵩山測區和黑龍江省齊齊哈爾測區,其中嵩山測區地貌以丘陵為主,高程范圍為0~1600 m;齊齊哈爾測區地貌以平原為主,高程范圍為100~400 m。試驗數據包括采用多線陣立體模式的ZY-3 02、TH-1三線陣影像、采用寬幅立體模式的GF-1寬幅相機影像以及機動立體模式的GF-2全色影像,各套數據的基本參數見表2。

表2 試驗數據基本參數
數據1和數據3為測繪衛星數據,其姿態角測量精度、視場角大小及交會角情況都非常良好,可以進行穩定的立體測圖;數據2、數據4、數據5為非測繪衛星數據,由于衛星的制作和安裝、軌道姿態以及成像目標自身的影響,將其用于平差將會產生較大的平面和高程誤差。其中,數據2和數據4為GF-1寬幅相機數據,相機視場角為16.44°,幅寬可達200 km,星下點分辨率為16 m;數據5為GF-2全色相機數據,星下點分辨率為1 m。需要說明的是,數據1、2、4、5采用的控制點物方坐標在高精度地理信息產品上人工采集所得,精度為分米級;數據3中的控制點物方坐標采用差分GPS技術實地測量獲取,精度為厘米級。所量測控制點均為影像上可明顯分辨的特征點,像點量測精度約為1~2個像素。
為全面驗證本文方法的精度特性,設計了若干試驗方案。為保證結果的客觀性,試驗中涉及的傳統區域網平差試驗均由商業軟件完成,且每次對比試驗保證在同一套控制數據和檢查數據的情況下進行。
試驗1:虛擬外方位元素補償模型試驗。通過試驗確定合理的誤差補償模型。
試驗2:高程面組合和軌道高度對算法精度影響試驗。為了研究高程面組合和軌道高度對算法精度的影響,設置不同的高程面組合和軌道高度值進行試驗。
試驗3:模擬數據試驗。為了驗證本文算法的有效性,分別利用傳統方法和本文方法對帶不同誤差的模擬數據進行單片系統誤差補償試驗。
試驗4:真實衛星數據試驗。設置不同的控制點配置方案,利用真實數據進行傳統區域網平差和附加視線向量修正的區域網平差試驗。
3.2 試驗結果及分析
3.2.1 虛擬外方位元素補償模型試驗
式(9)所示的改正模型參數較多,考慮到衛星平臺的運行特點,軌道高度HS和旋偏角ψZ的變化其實是非常小的,可以對模型進行合理精簡。根據上述分析,采取了以下幾種不同的參數設置方案來進行試驗:①a0~f3,共18個參數;②a0~b3,c0,d0~e3,f0,共14個參數;③a0~b3,d0~e3,共12個參數;④a0、b0、c0、d0、e0、f0,共6個參數;⑤a0、b0、d0、e0,共4個參數。
本試驗采用模擬數據進行,根據當前衛星平臺位置和姿態的在軌測量水平,在3個線元素上同時添加10 m的誤差,3個角元素上同時添加0.000 05 rad(≈10″)的誤差,利用10個均勻分布的控制點對生成的帶系統誤差的有理函數模型進行單片系統誤差補償,得到前視、下視和后視3幅影像的試驗結果見表3。
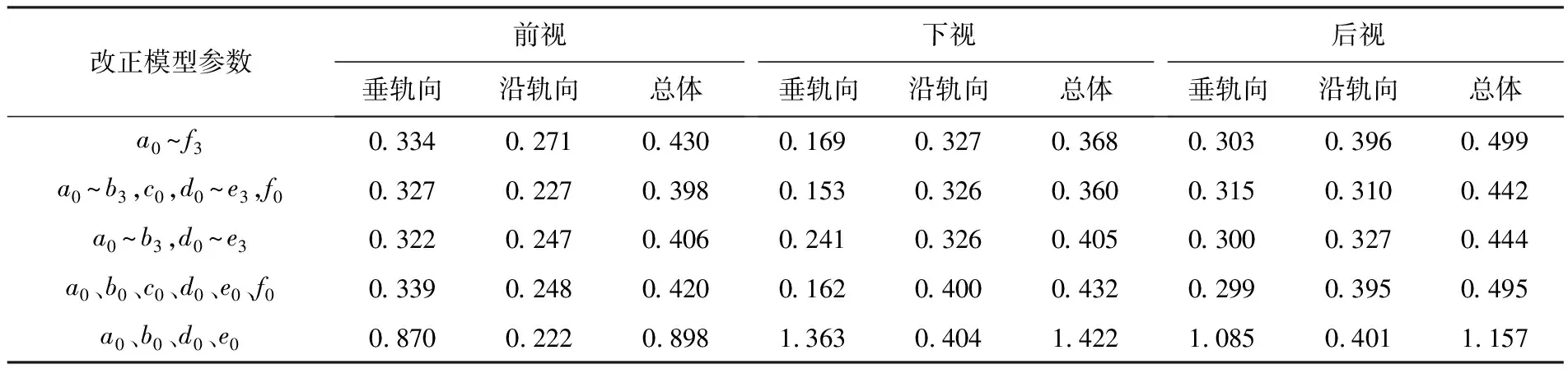
表3 不同改正模型檢查點精度統計
從表3所示的試驗結果可以看出,附加視線向量修正的衛星影像幾何定位方法是有效的,不管采用哪種虛擬外方位元素改正模型,控制點信息的引入都可以一定程度的削弱系統誤差。這表明,通過RFM模型恢復地面點成像時刻虛擬外方位元素,從系統誤差產生原因的角度進行建模的策略是可行的。不同的改正模型優化的效果存在差異,其中最差的就是4參數模型,經過補償后像方殘差仍然在1個像素左右。除去4參數模型,采用其他改正模型進行補償后,像方殘差基本都接近于有理函數模型的擬合精度。理論上18參數模型應該取得的精度最好,但由于本試驗僅采用了10個控制點進行解算,多余觀測數較少,因此精度比14參數模型略差,但如果控制點數量非常充足,還是建議采用18參數模型進行補償。總體來看,3幅影像都是采用14參數模型進行改正時的精度最優,而且控制點需求量要小于18參數模型,因此,本文將以14參數模型作為虛擬外方位元素的改正模型進行后續試驗。
3.2.2 高程面組合和軌道高度對算法精度影響試驗
虛擬外方位元素的恢復與兩個高程面的組合和軌道高度值的取值相關,本試驗置了多種相異高程面的組合以及若干軌道高度值來進行試驗,其中,軌道高度值的設定是通過在廠商公布的平臺軌道高度值上添加一定偏差值來實現。每個高程面的組合或軌道高度值都進行兩組試驗,一組試驗不利用控制點進行補償,直接采用虛擬外方位元素初值計算新RPC參數;另一組試驗利用10個控制點求取模型參數,對視線向量進行修正后再計算新RPC參數。利用新RPC參數求取檢查點像方殘差,并將結果與利用標稱軌道高度值和平均高程范圍求取的檢查點殘差進行比較,兩者的差值用于評價高程面組合或軌道高度值對算法精度的影響。
在高程面影響試驗中,按照高程起伏范圍設置了5個不同的組合進行試驗,試驗結果如圖6和圖7所示。

圖6 不同高程面組合對精度影響(無控)Fig.6 Influence of different elevation planes settings on positioning accuracy (without GCPs)
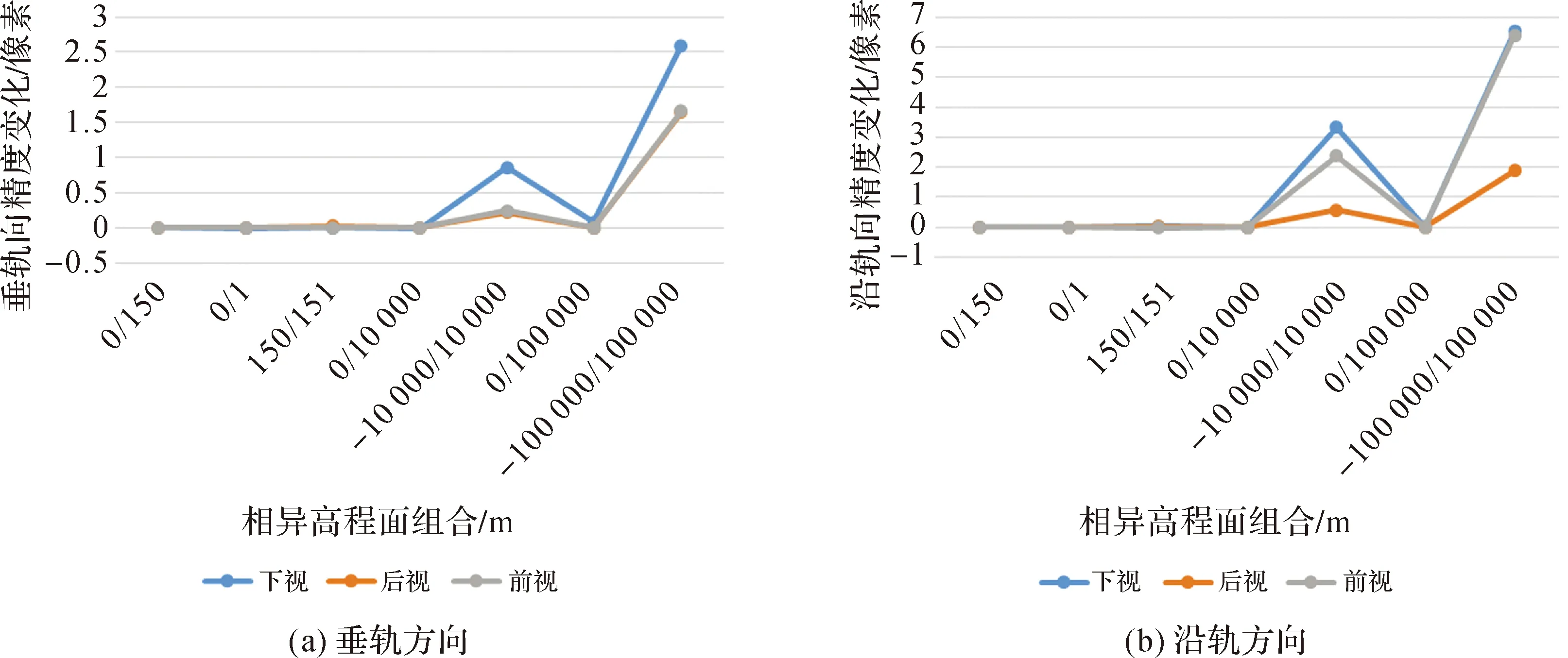
圖7 不同高程面組合對精度影響(10個控制點)Fig.7 Influence of different elevation planes settings on positioning accuracy (10 GCPs)
從試驗結果可以看出,高程面組合只要設定在合理范圍內,定位精度的變化都非常小;最高高程比最低高程對精度的影響更大,尤其是在沒有控制點進行系統誤差補償的情況下,這種影響更加明顯;無論是否進行系統誤差補償,沿軌向的精度變化都比垂軌向大,這表明沿軌向比垂軌向對高程面組合的設定更加敏感;在利用控制點進行誤差補償時,精度變化減小至像素級,表明控制點信息的引入可以有效地削弱視線向量造成的影響。
在軌道高度影響試驗中,設置了從±100 m到±10 km的若干不同軌道偏差值,試驗結果如圖8和圖9所示。

圖8 不同軌道高度對精度影響(無控)Fig.8 Influence of different orbit height on positioning accuracy (without GCPs)
圖8和圖9為不同軌道高度值的試驗結果,可以看出,在不進行系統誤差補償的情況下,軌道高度值對定位無影響。因為從理論上來講,虛擬外方位元素根據軌道高度值計算所得,它們之間存在著固定的比例關系,在不利用控制點更新模型參數的情況下,這種關系是保持不變的。因此,改變軌道高度值的設定并不會對定位精度造成影響。利用控制點進行系統誤差補償時,軌道高度值對定位精度的影響非常小,即使將軌道高度設定為與標稱軌道高度偏差10 000 m,其對精度的影響在垂軌向不超過0.01像素,沿軌向不超過0.005像素。
根據上述試驗結果和分析,在實際使用中,高程面組合應該盡量貼近測區范圍的真實情況,軌道高度值的設定對定位精度的影響不大,使用廠商公布的軌道高度即可。后面的區域網平差實驗將按此原則進行計算。
3.2.3 模擬數據試驗
為更好地對比本文方法和傳統方法的差異,模擬生成了一系列帶不同大小誤差的有理函數模型,分別利用兩種方法進行系統誤差補償。表4所示為10個控制點情況下,由原始下視影像生成的模擬數據的試驗結果。

表4 模擬數據試驗精度統計
根據誤差補償的結果,繪制了檢查點的像方殘差分布圖,其中編號10試驗的檢查點殘差分布如圖10所示。
從試驗結果可以看出,當不存在外方位元素誤差時,利用傳統方法和本文方法進行誤差補償后的定位精度約為0.35像素,此誤差可以視為RFM模型的擬合誤差。
對于線元素誤差,兩種方法均能有效進行消除,且補償后的定位精度基本接近于擬合誤差;傳統方法對線元素誤差的補償效果要略優于本文方法,但兩者差別非常小,當線元素各方向上的誤差增加至1000 m時,兩者的差別仍在0.05像素以內。針對目前衛星軌道位置測量可達到的精度水平,可以認為兩者對于線元素誤差的補償效果相當。
對于角元素誤差,兩種方法都能進行一定程度的吸收,但補償效果有所差別,本文方法對角元素誤差的吸收效果要優于傳統方法,尤其是當角元素誤差增大到0.1 rad時,兩者的差距可以達到8.5像素,這表明本文方法比傳統方法具有更好的穩定性;按照本文之前的分析,角元素誤差對垂軌向的影響比沿軌向復雜,試驗結果也表明,當角元素誤差逐漸增大時,垂軌向誤差要明顯大于沿軌向誤差,這與本文的分析相吻合;目前的姿態角測量精度雖然遠優于0.1 rad,但對于某些大視場角相機,角元素誤差造成的影響更加明顯,因此在傳統方法無法有效提升的情況下,本文方法可以達到比傳統誤差補償方法更高的精度。
3.2.4 真實衛星數據試驗
采用真實衛星數據進行不同數量控制點配置的傳統區域網平差和本文平差方法的對比試驗,不參與平差的控制點全部作為檢查點進行精度統計,以檢查點中誤差作為評價指標。測繪衛星數據的試驗結果見表5,非測繪衛星數據的試驗結果見表6。

圖9 不同軌道高度對精度影響(10個控制點)Fig.9 Influence of different orbit height on positioning accuracy (10 GCPs)

圖10 編號10試驗檢查點殘差分布(放大100倍)Fig.10 Checkpoint residual distribution of scheme10 (magnified 100 times)

表5 測繪衛星數據試驗精度統計
從表5的統計結果可以看出,對于無控制點的自由網平差,附加視線向量修正的區域網平差可達到與傳統方法相當的平面精度,其中嵩山地區的平面精度甚至還要優于傳統方法;但其高程精度相當低,與傳統方法的結果根本不在一個數量級。這是因為,初始虛擬外方位元素畢竟是由視線向量恢復所得,視線向量的求解精度會影響定位結果,此外,虛擬外方位元素計算過程中的舍入誤差也不容忽略,從式(4)可以看出,ψX和ψY的量級是比較小的,實際計算中大概在10-8~10-9,這兩者造成的影響必須通過控制點信息對恢復出的初始虛擬外方位元素進行調節才能使其趨于真實情況。添加稀少數量控制點后,兩種方法均可有效消除區域網的系統偏移,使定位精度得到提升,這一點對于未經幾何檢校的ZY-3數據尤其明顯。從精度改善百分比可以看出,在控制點數量不充足時,本文方法的提升效果要略低于經典方法;隨著控制點信息的增加,兩者的精度趨于相當,這說明對于成像條件比較好的測繪衛星,本文方法可以達到與傳統方法同水平的誤差補償效果。

表6 非測繪衛星數據試驗精度統計
從表6的結果可以看出,對于大視場角的GF-1數據,盡管自由網平差的高程精度較低,這是由算法特點造成的,但加入控制點后,本文算法無論在平面方向還是高程方向,可以達到的精度都比傳統區域網平差方法的精度要高,這一點在平坦的齊齊哈爾測區表現得更加明顯。這表明,對于大視場角相機且姿態測量精度偏低的非測繪衛星平臺,從誤差產生原因的角度進行建模,比傳統方法從誤差導致的結果進行建模補償的效果更好。由于并非三線陣影像,非測繪衛星形成的重疊影像普遍會存在弱交會角的情況,事實上,數據2、數據4和數據5都存在這種情況。對于數據2和數據4,采用傳統區域網平差算法還能得到比較可靠的結果是因為人工剔除掉了多度重疊中存在的弱交會光線,如果不進行這種處理,這種弱交會狀態將會影響整個區域網平差的質量,使結果出現較大偏差,而本文所述算法則無須考慮這種情況即可得到穩定的結果。對于數據5,同軌相鄰影像盡管存在重疊區域,但實際上并不存在視差,而異軌影像間交會角約為5°,這種交會狀態使得采用傳統方法即使在有控制點的情況下也無法得到結果。而利用本文方法,在充足數量控制點的情況下,最終可以達到平面3.70 m,高程4.96 m的精度水平。傳統區域網平差根據成像關系在像方建立觀測方程,前方交會求解物方坐標是一個迭代的過程,而當光線近似平行時,需要非常良好的初值才能得到穩定的結果。而本文方法在物方空間根據相似幾何關系建立攝影點和地面點之間對應關系,利用該方程求解連接點物方坐標是一個線性方程,并不需要迭代求解;且計算過程中法方程條件數要小于前方交會時法方程條件數。因此,可以削弱由光線近似平行時造成的平差結果惡化,在處理弱交會影像定位問題時,還具有不需要輔助DEM數據支持的優勢。理論上,本文方法在處理大姿態角誤差、大視場角以及弱交會角等各種嚴苛條件下的衛星影像定位問題時,具有比傳統方法更大的優勢。
4 結 論
為提高對地觀測數據的應用效益,本文提出了一種附加視線向量修正的衛星影像區域網平差方法。該方法從系統誤差產生原因的角度進行誤差建模,能夠避免傳統區域網平差方法的條件限制。采用模擬數據對模型重建參數進行了分析,并對比了不同誤差大小情況下傳統方法和本文方法的精度差異。試驗結果表明,常規情況下,本文方法可達到與傳統方法相當的精度;當姿態角誤差較大時,可以達到比傳統方法更高的精度,最高可優于經典方法8.5像素。在此基礎上,選取兩塊不同地貌試驗區共5套真實數據進行試驗,并將結果與傳統區域網平差算法進行了比較。試驗表明,附加視線向量修正的區域網平差方法是有效可行的,盡管無控條件下的高程精度不理想,但少量控制點信息的引入即可消除這種影響,該方法處理測繪衛星數據可以達到與傳統方法相當的精度;處理非測繪衛星數據時,可達到比傳統方法更高的精度,并且能夠削弱區域網內弱交會狀態造成的惡化。理論上,采用該方法處理大姿態角誤差、大視場角以及弱交會角等各種嚴苛條件下的衛星影像能達到比傳統方法更好的效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
