
基于關節耦合補償提高機器人絕對定位精度
2021-01-13 12:17:10劉華輝馬忠睿梁旭斌潘海鴻
裝備制造技術 2020年10期
陳 琳,劉華輝,馬忠睿,梁旭斌,林 志,潘海鴻
(廣西大學機械工程學院/實訓中心,南寧530004)
0 引言
目前,大多數六自由度工業機器人的重復定位精度在0.1 mm以上[1-2],可以滿足電子產品制造、汽車生產、焊接等工業應用的基本要求。然而,隨著技術的發展,特別是在航空航天和精密制造領域,機器人的生產需求要求機器人具有較高的絕對定位精度[3-5]。六自由度工業機器人的結構設計中,為增加末端執行器的靈活性和快速響應性,需減輕大小臂和手腕部分的重量,一般是將臂關節和腕關節的驅動電機向腰部(基座)方向移動。這導致部分關節的運動傳遞線路加長,各關節的運動不可避免地相互影響,即產生耦合運動(稱為單向耦合)。機器人關節耦合會導致關節角運動不到位,是影響機器人末端絕對定位精度誤差因素[6-7]之一。
目前國內外關于機器人關節耦合運動對機器人絕對定位精度影響的研究較少。韓建達[8]等分析機器人關節加速度反饋解耦控制的開環模型,提出閉環控制策略的設計準則。林義忠[9]等分析耦合運動產生的原因,探討耦合運動造成的驅動電機的功率冗余現象。王戰中[10]等找出耦合運動對手腕運動學和動力學性能的影響規律,并進行動力學仿真,對機器人關節驅動電機的選型提供重要參考意義。
上述研究都是從運動學或動力學的理論仿真層面研究分析機器人關節耦合運動的影響,缺少實際工業環境中研究關節耦合對機器人絕對定位精度的影響。為此,提出用激光跟蹤儀實驗測試方法衡量關節耦合對機器人末端精度的影響,并用關節補償策略減少關節耦合的影響,最后通過對比驗證其對提高絕對定位精度的有效性。
1 機器人關節耦合比測量方法
1.1 機器人關節耦合比測量方法
靠近六自由度工業機器人基座關節的轉動會引起后面關節的轉動,類似于一種固定傳動比的聯動[9],稱為關節耦合比。一般將4、5、6關節的驅動電機放在機器人腰部位置,因關節運動傳遞線路加長導致關節間產生耦合運動,即關節4、5、6之間可能存在的耦合關系。
用激光跟蹤儀測量出關節間的耦合角度:
(1)機器人運行至原點位置(所有關節轉角值為0°),分別測量靶球與靶標所在位置點(圖1),得到關節i和關節j起點位置,記為
(2)通過上位機下發指令使關節i運動角度△θi,此時分別測量靶球與靶標所在位置點,得到關節i和關節j終點位置,記為
(3)下發指令使關節j運動至-60°,利用空間掃描功能,記錄靶標所掃過的軌跡,記為Ji;
(4)下發指令使關節i運動至0°,利用空間掃描功能,記錄靶球所掃過的軌跡,記為Ji。

圖1 靶球和靶標安裝位置
用起點Pi及Ji軌跡建立關節i坐標系XiYiZi(圖2),通過起點Pi、終點Pi′與關節i坐標系原點間的連線可求出關節實際轉動的角度△θi;接著將關節i坐標系繞Zi軸轉動△θi角度,得出關節i實際轉動坐標系Xi′Yi′Zi′。利用起點Pj在關節i坐標系XiYiZi下的坐標信息,在關節i實際轉動坐標系Xi′Yi′Zi′中創建關節j理論終點Pj″。利用終點Pj′及Jj軌跡建立關節j坐標系XjYjZj,則終點Pj′在坐標系XjYjZj中的位置為關節j的實際終點Pj″,將上述創建的理論終點Pj″在坐標系XjYjZj中表示,再將坐標系XjYjZj下的實際終點Pj″和理論終點Pj″轉換到柱面坐標系中,則可得到實際終點與理論終點之間的角度差值,該差值即為關節i和關節j之間的耦合角△θi(i=4、5,j=5、6,i<j)。

圖2 坐標系轉換關系
1.2 機器人關節耦合補償
由于各關節之間耦合運動的存在,對機器人逆運動學方程獲得的關節轉角值,要按照耦合運動的耦合比對各關節轉角進行補償,補償步驟:
(1)將關節i的實際關節轉角△θi和關節i與關節j之間的耦合角△θi帶入式(1),計算出2個關節間耦合比qij。
(2)假設通過機器人逆運動學方程求解得到的關節i和關節j轉角值分別為θi、θj,由于關節耦合只對關節j轉角值造成影響,需要對關節j進行補償,由式(2)計算出補償后關節的下發關節轉角值θ′j。

2 實驗驗證
2.1 實驗平臺
以埃夫特ER6B-C60工業機器人搭建實驗平臺(圖3),其主要包括機器人本體、Radian激光跟蹤儀(主要性能指標見表1)、電氣控制柜等。

圖3 埃夫特ER6B-C60型工業機器人實驗平臺

表1 Radian激光跟蹤儀主要性能指標
2.2 機器人關節耦合比測量結果
根據1.1中方法對機器人關節耦合比測量實驗。控制機器人關節5轉動-90°時,激光跟蹤儀測量其實際轉動角度為-90.0528°,關節6耦合角度為2.9874°,根據式(1)計算 5,6 關節耦合比:

將計算出的耦合比(-0.0332)補償到機器人6關節中,重復上述步驟測試補償后關節5運動-90°時引起關節6的耦合角度僅為0.0078°。表明關節耦合比補償可提高機器人的關節運動精度。
2.3 關節耦合補償對絕對定位精度的提高
耦合比補償對機器人絕對定位精度的影響實驗:在機器人的工作空間內任意選擇10個位置點,記錄上位機下發的名義位置值xn、yn、zn和激光跟蹤儀測量得到的實際位置值xc、yc、zc。對比耦合比補償前后名義位置值和實際位置值的誤差。
補償前三種情況下記錄耦合比對機器人絕對定位精度的影響:(1)全部關節轉動;(2)5 關節單獨轉動,其余關節不轉動;(3)5關節不轉動,其余關節轉動。
對6關節耦合補償后,測量任意關節運動情況下名義位置值和實際位置值的誤差。圖4分別給出補償前后機器人末端X、Y、Z三個方向的位置誤差及絕對定位誤差

圖4 補償前后空間點位置誤差
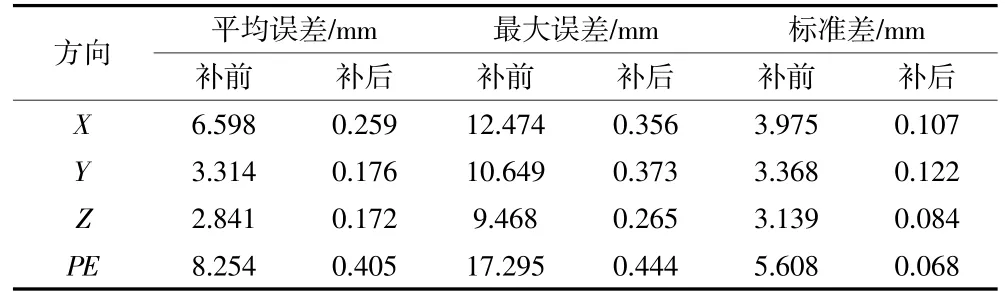
表2 全關節轉動10個測試點補償前后誤差結果統計
當機器人全部關節轉動和5關節單獨轉動時,因關節5和關節6存在耦合,補償前最大絕對定位誤差PE達到19.355 mm,補償后最大誤差下降到0.460 mm,誤差減少97.62%。當5關節不轉動,其它關節轉動,補償前后絕對定位誤差相差不大。
統計機器人全關節轉動時10個測試點的平均數據(表2):補償前X方向平均誤差6.598 mm,補償后其下降到0.259 mm;最大誤差由12.474 mm下降到0.356 mm;PE平均誤差也由8.254 mm下降到0.405 mm,誤差減少95.10%。
TCP繞頂針旋轉是反映機器人的動態精度。TCP繞頂針實驗:測試耦合比對機器人末端動態精度的影響。控制機器人的TCP繞頂針旋轉一定角度,測量TCP繞頂尖旋轉過程中的最大誤差。耦合比補償前TCP誤差約為2 mm(圖5a),補償后誤差下降到約1 mm左右(圖5b)。上述實驗表明通過耦合比補償后,機器人絕對定位精度和動態精度均得到有效提升。

圖5 TCP繞頂尖測試
3 結論
為減少關節耦合對機器人末端絕對定位精度的影響,通過激光跟蹤儀測量出關節耦合的角度,并計算出關節耦合比,將其補償到關節運動中。補償后的關節耦合角度相對于補償前有明顯下降,機器人末端平均絕對定位精度提高95.10%。可有效減少因工業機器人存在關節耦合的情況,對機器人末端絕對定位精度和動態精度造成的影響。
