混凝土壩澆筑振搗質量智能化監控研究
2021-01-13 01:28:06劉明生,莊海龍,劉澤艷
四川水力發電 2020年6期
劉 明 生, 莊 海 龍, 劉 澤 艷
(中國水利水電第七工程局有限公司,四川 成都 610213)
1 概 述
隨著我國西部大開發進程的加快,大中型水電工程建設在西部、西北部地區呈日新月異的發展,水電工程建設逐漸向更加偏遠的高海拔山區挺進。隨著熟練施工人員的逐漸缺失,機械化振搗設備逐漸走入水電工程建設并得到充分發展。水電工程大壩混凝土澆筑施工已逐漸向少人化、機械化、智能化過渡。
楊房溝水電站大壩混凝土澆筑振搗質量智能化監控研究的目的是研究如何在大壩、廠房等大體積混凝土機械化施工過程中充分利用高速發展的互聯網技術、智能化技術,使質量管理人員在后方即可對現場混凝土振搗澆筑質量進行適時監控和指導,實現對施工現場的混凝土振搗位置、振搗時間、插入深度和角度等遠程、在線、實時可視化監控分析并對現場每次混凝土振搗施工過程信息進行記錄、保存,并可對施工質量情況、施工過程情況可隨時進行查詢。
楊房溝水電站位于四川省涼山彝族自治州木里縣境內的雅礱江中游河段上,該河段是規劃中的第6 級水電站。電站總裝機容量為1 500 MW,安裝4臺、單機容量為375 MW的混流式水輪發電機組。工程為一等大(1)型工程。工程樞紐主要建筑物由擋水建筑物、泄洪消能建筑物及引水發電系統等組成。擋水建筑物為混凝土雙曲拱壩,壩頂高程2 102 m,最大壩高155 m,拱冠梁頂寬9 m,底寬32 m,厚高比為0.206,最大拱端厚度為34.9 m。拱壩共設17個壩段, 設計有3個中孔、4個表孔及1個生態泄放孔。筆者詳細介紹了該壩混凝土澆筑振搗質量智能化監控研究內容。
2 混凝土澆筑振搗質量智能化監控原理
混凝土澆筑振搗質量智能化監控按照目前的技術手段,主要適用于大壩、廠房等大體積混凝土機械化施工的倉號,主要針對拱壩、重力壩、廠房等非鋼筋密集區部位使用。對于鋼筋網密集區,由于不能采用機械化振搗設備進行振搗的條件限制,只能起到視頻監控作用;對于采用人工進行混凝土振搗質量監控,尚須現場施工人員實施管控。
混凝土澆筑振搗質量智能化監控的原理是通過在振搗臺車上安裝GPS定位系統,在振搗棒頭安裝激光測距儀、電子羅盤測角度等傳感器進行的。通過激光測距儀測量振搗棒距離混凝土表面的距離計算棒頭插入混凝土中的深度是否滿足鋪料后振搗深度的質量要求;通過電子羅盤測角度傳感器測得的傾斜角度監測振搗棒振搗時其角度是否滿足要求;系統通過記錄振動棒在同一位置振搗的時間差監測振搗時間是否滿足生產性試驗總結的振搗時間要求;按照倉面設計平面圖對每一坯層振搗情況進行系統的測量、記錄,系統通過分析振動棒在整個倉號平面位置振搗的次數、時間,計算并分析重復振搗的情況、漏振情況,并結合振搗的深度、角度、時間等綜合分析每坯層的振搗質量,最后進一步判定每倉的澆筑振搗質量。
澆筑振搗質量智能化監控研究的原理:通過在振搗臺車上安裝GPS定位[1]、激光測距、電子羅盤測角度等傳感器,研發了集成多源傳感器,基于“采集-集成-分析-反饋”信息于一體的振搗施工質量實時監控系統,通過服務端對多源數據進行集成并將其存儲至數據庫,客戶端能夠實現對振搗施工數據的可視化分析,實現對振搗位置、振搗次數、振搗時間、插入深度和角度等遠程、在線、實時可視化監控分析,并對每次振搗施工過程進行信息的記錄、分析、查詢、判斷,可適時地對現場不符合設定指標的操作提出預警,管理人員據此可查詢并對所出現的問題進行適時整改糾正,從而達到遠程監督、指導、糾偏、確保現場振搗施工質量的目的。
3 澆筑振搗質量智能化監控系統的設計、安裝與應用
混凝土澆筑振搗施工質量實時監控系統主要由定位基準站、振搗臺車感知端、通信網絡、配套軟件客戶端等部分組成。系統的整體監控原理如圖1所示,振搗臺車[2]監控端設備的安裝情況見圖2,核心集成主機見圖3。
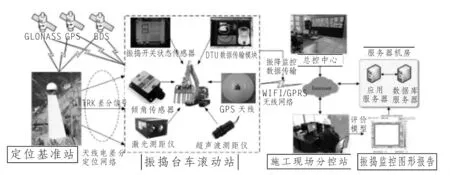
圖1 混凝土澆筑振搗施工質量實時監控系統原理圖
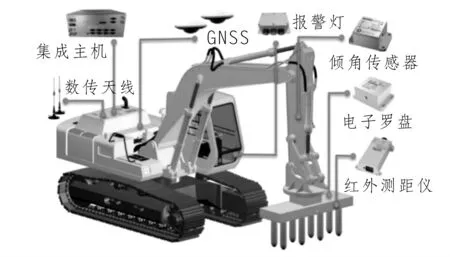
圖2 振搗臺車設備安裝布置圖

圖3 自主研發的集成主機
3.1 差分定位基準站
差分定位基準站是整個感知系統的“位置標準”。鑒于衛星定位接收機單點定位精度只能達到分米級,而對于振搗坐標參數的感知要求其定位精度達到厘米級,故該方法無法滿足要求。
為了提高衛星的定位精度,在建立感知系統時采用實時動態差分技術,利用已知的基準點坐標實時修正所獲得的測量坐標。首先,在大壩壩頂適當位置建立基準站(圖4),在基準點處設立一定位天線并設置了配套的衛星定位接收機,通過無線通信鏈路將基準點的定位測量數據和該點實際位置信息實時發送給大壩倉號內的振搗臺車感知端的接收機,通過與感知端的定位坐標一起進行差分數據處理,計算得出厘米級的感知端定位坐標信息,從而實現振搗定位精度的大幅度提升。
差分定位基準站通過互聯網技術,負責將現場大壩倉內振搗臺車混凝土澆筑振搗的實際情況與后方集成主機聯絡進行數據的適時傳輸。
3.2 硬件系統的安裝與部署
系統硬件的部署主要分為兩部分:一是在振搗臺車上安裝多源傳感器進行數據的監控以及與定位設備進行實時差分的基站,其安裝情況見圖4、5。二是安裝在總包機房的2臺系統服務器,負責數據的存儲和備份,其安裝情況見圖6。

圖4 基準站硬件安裝圖
振搗臺車感知端亦稱振搗臺車機載終端,包括安裝在振搗臺車上的外接雙天線的衛星定位接收機、傾角傳感器(內置電子羅盤)、激光測距儀、數據傳輸設備DTU以及駕駛室報警設備。這些設備統一連接到自主研發的集成主機上,然后通過數據發射端將所感知的數據進行打包發送。其中,衛星定位接收機不間斷地接收BDS、GPS和GLONASS衛星信號,按照1Hz的頻率對振搗臺車進行定位,并通過差分信號網絡與基準站進行實時動態差分,從而獲得高精度的振搗臺車空間位置數據。傾角傳感器分別安裝在振搗臺車的小臂和振搗機架上,測量小臂和振搗機架的傾角數據和振搗臺車的航向角數據,結合定位數據、角度數據和振搗臺車機械幾何尺寸數據實時確定振搗棒的空間姿態。將紅外激光測距儀安裝在振搗機架上,用于實時測量振搗棒末端與混凝土表面的直線距離。數據傳輸設備通過電臺無線通信數據鏈路將定位數據、角度數據、距離數據等狀態數據發送至系統分析存儲服務端。報警設備負責接收服務器發送的報警處理信息,并通過LED屏和指示燈提醒振搗臺車駕駛員規范作業。振搗車施工監控硬件的安裝位置見圖5。
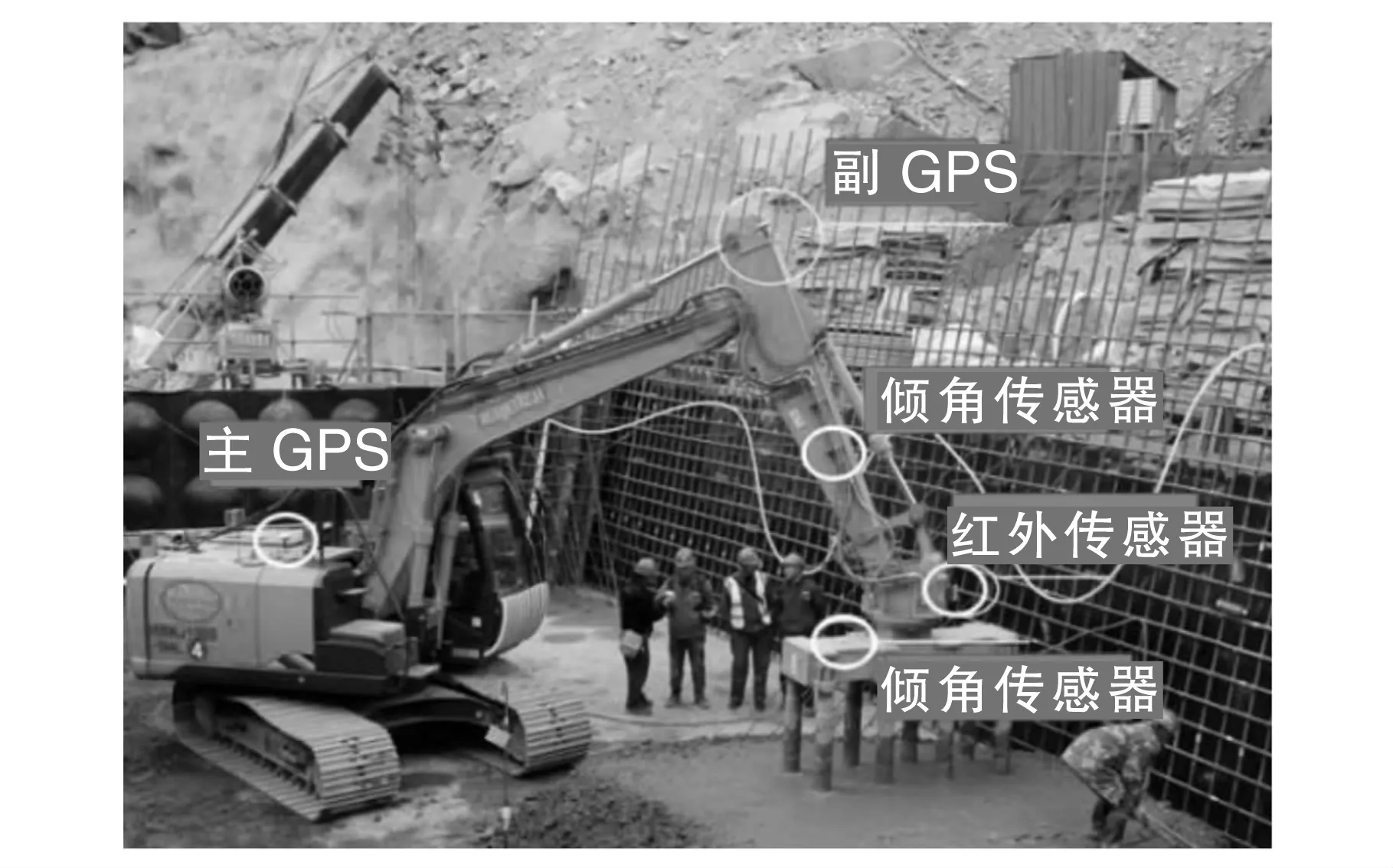
圖5 現場施工監控系統硬件安裝圖

圖6 總包機房服務器布置圖
3.3 通信網絡
通信網絡[3]是連接與溝通感知系統與饋控端、后臺總控端以及分析存儲服務端等各工作節點的橋梁,也是數據傳輸的主要渠道。
感知系統的通信網絡包括無線電臺通信網絡和光纖有線通信網絡,其中無線電臺通信網絡實現振搗臺車感知端和現場饋控端間的通信。現場饋控端與雅礱江流域水電開發有限公司楊房溝水電站建設管理局營地后臺總控端和分析存儲服務端由于距離過遠且遮蔽物較多,不適用于無線通信,因而架設了光纖線路[4]進行數據傳輸。總控端和服務端間通過營地內部的局域網進行連接通信。
3.4 軟件系統
軟件系統是保障整個硬件系統能夠正常工作的基礎,包括服務端和客戶端。服務端部署在現場工控機電腦上,負責對集成主機發送的數據進行解析、處理并存儲在營地的數據庫中;客戶端的主要作用是實現對振搗監控系統的綜合管理以及可視化分析,通過派遣安裝有儀器的振搗臺車至施工倉面,對倉面數據進行管理,通過實時可視化振搗施工作業信息,實現對振搗施工過程的實時監控,并對不滿足標準的部位進行彈窗報警,如在駕駛艙安裝工控機,可以實時提醒操作人員振搗情況。
軟件系統包括服務端和客戶端。服務端負責對集成主機發送的數據進行解析、處理并存儲在營地的數據庫中;客戶端的主要作用是實現對振搗監控系統的綜合管理以及可視化分析。
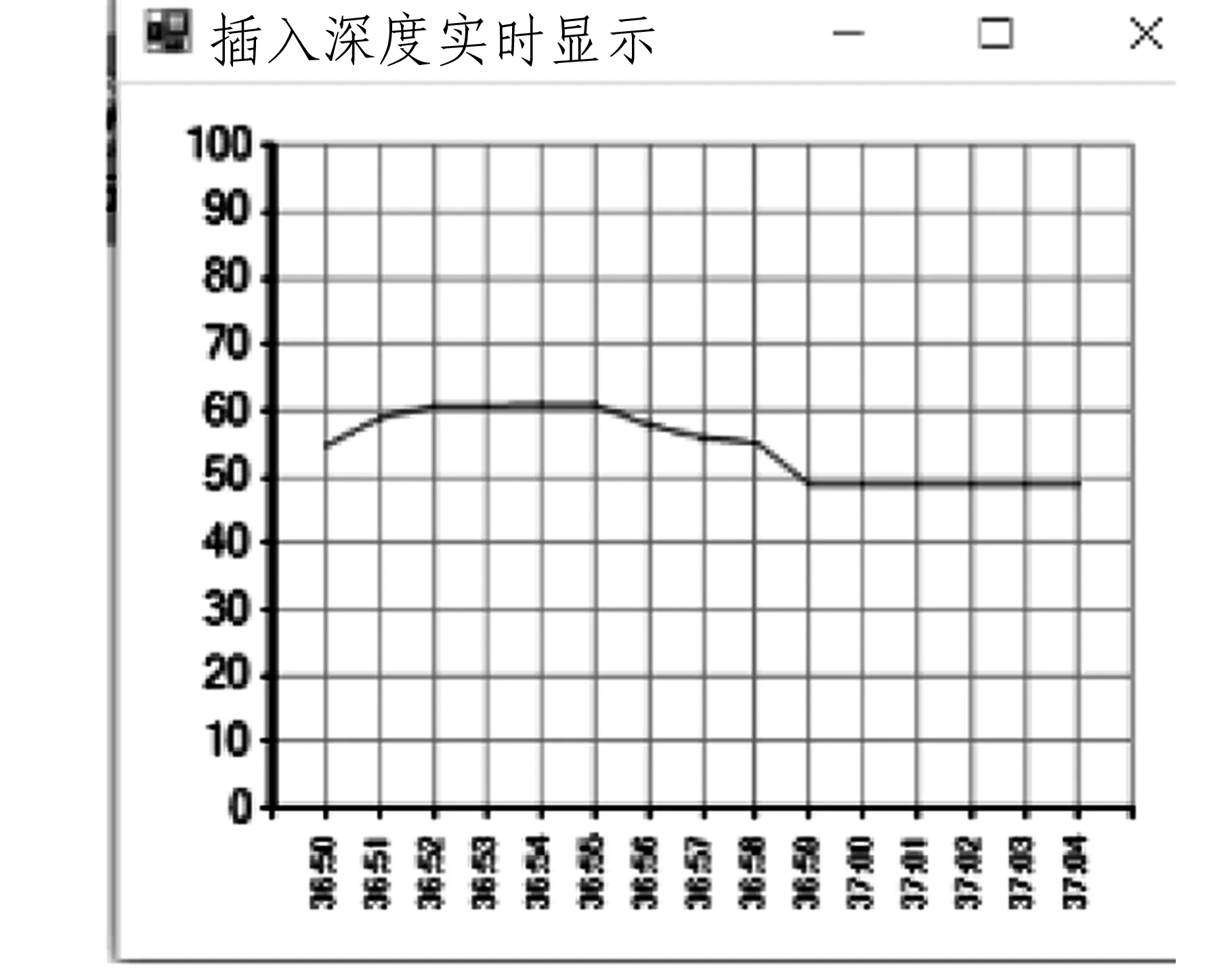
在實時監控過程中,可以對每次振搗作業的振搗位置、振搗時間、插入深度等信息進行可視化,振搗實時曲線見圖7。
(a)
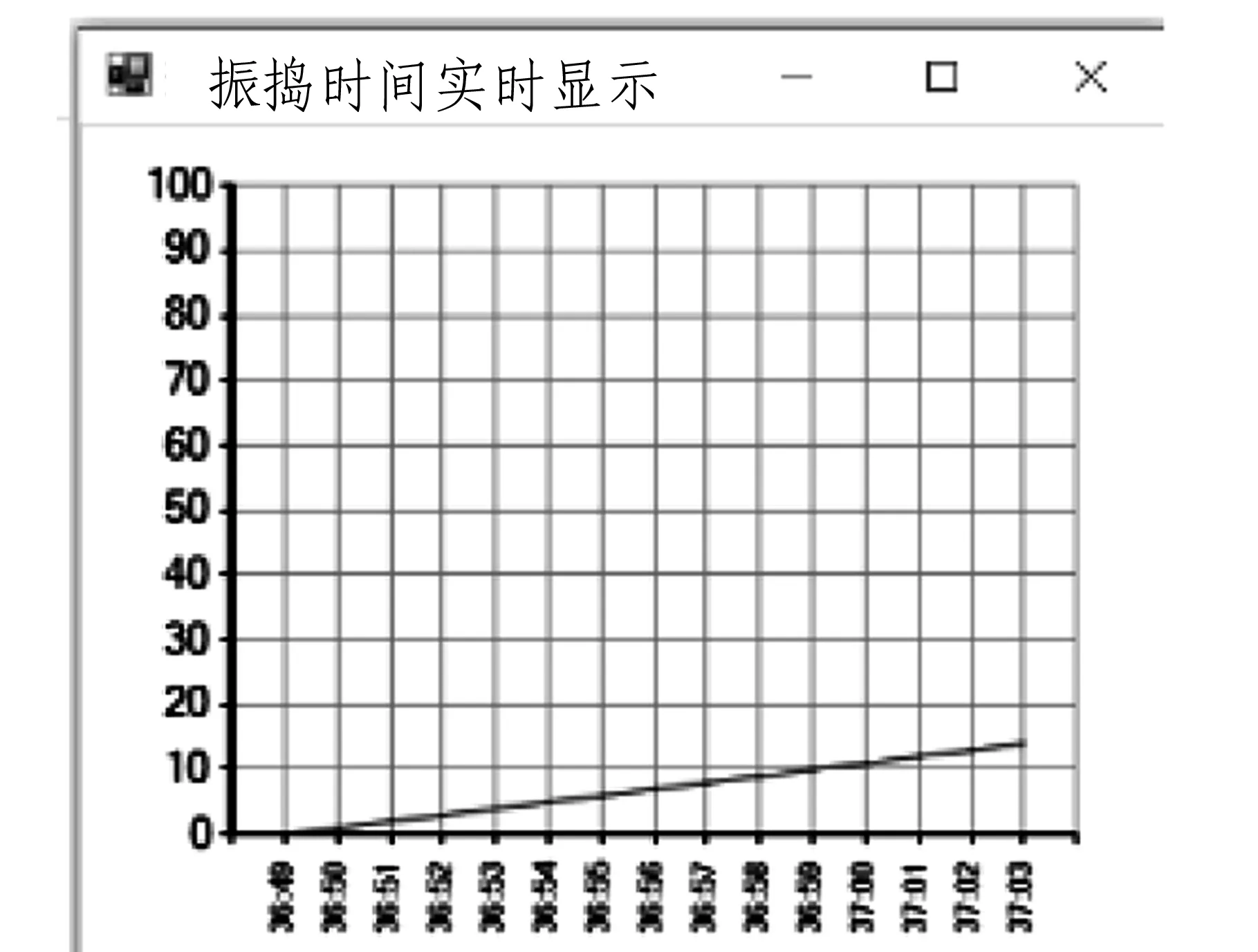
(b)圖7 插入深度和振搗時間實時監控曲線圖
對某一倉面振搗施工歷史信息進行統計分析,將單次插入深度和振搗時間繪制關系曲線。如12壩段12#-12倉:高程為1 993~1 996 m,單次振搗插入深度曲線見圖8,單次振搗時間曲線見圖9。
3.5 實施效果統計分析
混凝土澆筑振搗質量智能化監控系統通過采用信息化技術,實現了對振搗作業信息的精準感知,用其代替了傳統依靠人工經驗方法進行振搗參數質量評估的方式,從而輔助監督現場操作人員規范化施工,為保證混凝土澆筑振搗質量、規范現場振搗施工標準化提供了重要的技術支撐。
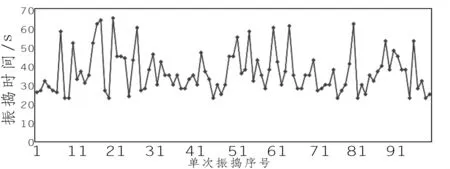
圖8 12#-12倉面單次振搗插入深度曲線圖
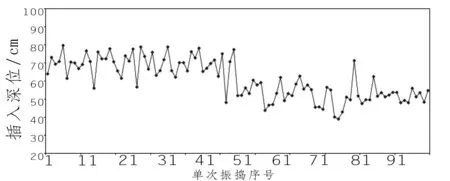
圖9 12#-12倉面單次振搗時間曲線圖
截止2020年8月,在楊房溝水電站大壩混凝土澆筑施工過程中,采用混凝土澆筑振搗質量智能化監控系統共監測了12個壩段、206倉澆筑情況數據,共計監控45 019次振搗過程,數據存儲容量達25 G,各壩段監控數據統計情況見表1。
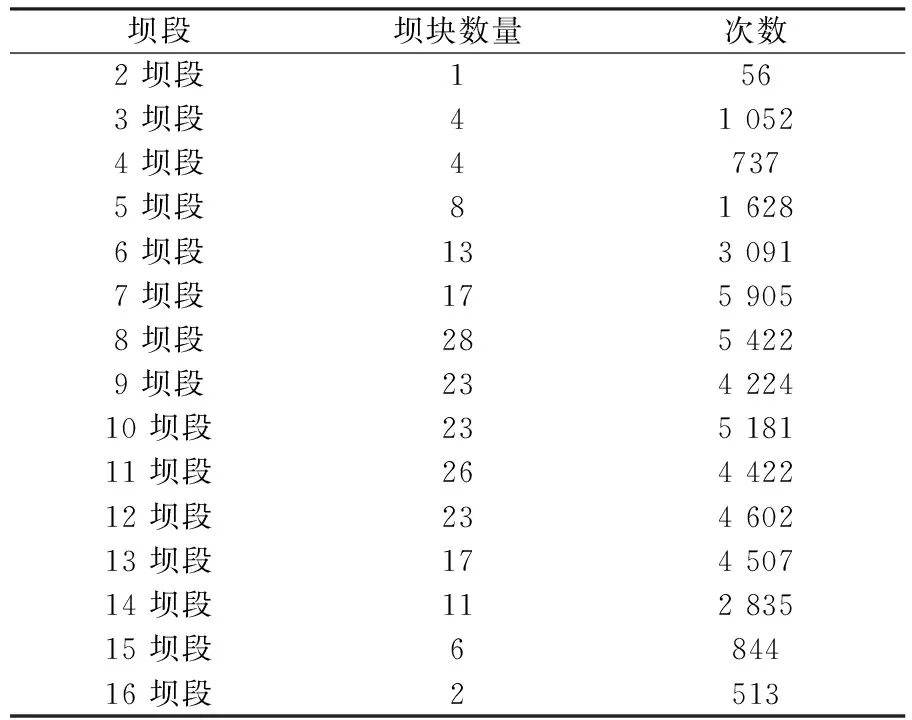
表1 振搗施工質量監控情況統計表
自楊房溝水電站拱壩施工采用智能振搗系統之后,施工質量總體優良,施工過程中未發生漏振現象,但存在少量過振和重復振搗現象。拱壩壩體現場鉆孔取芯情況表明:芯樣質地密實,骨料分布均勻,施工縫面膠結良好,抗壓強度、劈拉強度、極限拉伸、抗凍性能、抗滲等級等試驗檢測指標均滿足設計要求。
4 結 語
隨著水電工程建設的發展,大壩、廠房等大體積混凝土澆筑必將推廣使用機械化振搗施工,而采用BIM視頻系統、GPS定位系統、互聯網技術等先進科學技術進行智慧大壩[5]、智慧廠房建設是大的發展趨勢。楊房溝水電站進行的混凝土澆筑振搗質量智能化監控研究,對非鋼筋密集區大壩、廠房等機械化振搗施工質量控制起到了有效的監督、指導、糾偏作用,為促進智慧大壩建設工作積累了一定的經驗,其它類似工程可以借鑒、完善和推廣使用。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
現代裝飾(2022年5期)2022-10-13 08:48:04
建材發展導向(2022年10期)2022-07-28 03:04:00
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
印刷工業(2020年4期)2020-10-27 02:45:52
水利規劃與設計(2020年1期)2020-05-25 08:01:30
中國生殖健康(2019年2期)2019-08-23 08:12:08
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
中國交通信息化(2017年4期)2017-06-06 07:21:52
