一種大基線分布雷達(dá)近場(chǎng)相參探測(cè)技術(shù)
2021-01-13 00:33:36吳劍旗戴曉霖楊利民楊生忠王啟超
雷達(dá)科學(xué)與技術(shù) 2020年6期
吳劍旗,戴曉霖,楊利民,楊 超,楊生忠,王啟超,孫 斌
(1. 中國(guó)電子科技集團(tuán)公司第三十八研究所,安徽合肥 230088; 2. 中國(guó)人民解放軍第63768部隊(duì),陜西西安 710000; 3. 北京跟蹤與通信技術(shù)研究所,北京 100094)
0 引言
分布式孔徑雷達(dá)由多部空間上分散的單元雷達(dá)組成,雷達(dá)通過(guò)接收相參或收發(fā)全相參的方式,對(duì)單元雷達(dá)的孔徑進(jìn)行合成,形成等效的單部大功率孔徑雷達(dá),獲得檢測(cè)信噪比得益,實(shí)現(xiàn)目標(biāo)探測(cè)能力的提升[1-5]。與傳統(tǒng)雷達(dá)相比,由于單個(gè)獨(dú)立陣面規(guī)模大大縮小,分布式陣列雷達(dá)具有良好的平臺(tái)適應(yīng)性、更高生存能力等特征,是雷達(dá)發(fā)展的重要方向[6-7]。
為了獲得高角度分辨能力,分布式孔徑雷達(dá)通常具有大基線特點(diǎn),不同的應(yīng)用場(chǎng)景和平臺(tái),基線在公里甚至數(shù)千公里量級(jí)。因此,分布式陣列對(duì)目標(biāo)探測(cè)多為近場(chǎng)場(chǎng)景,此時(shí)不同孔徑對(duì)目標(biāo)的觀測(cè)角相差較大,接收到的目標(biāo)回波之間的相參性難以保持,導(dǎo)致回波信號(hào)無(wú)法相參疊加,進(jìn)而影響相參探測(cè)效果[8]。目前國(guó)內(nèi)外針對(duì)這一問(wèn)題的研究報(bào)道甚少,諸多問(wèn)題尚待深入研究。針對(duì)上述探測(cè)困難的問(wèn)題,本文研究了在大基線下分布式孔徑雷達(dá)的目標(biāo)回波相參性與回波角度和雷達(dá)距離分辨率的內(nèi)在關(guān)聯(lián),構(gòu)建理論模型,給出了分布式孔徑信噪比得益改善方法,并針對(duì)典型的目標(biāo)模型進(jìn)行了仿真驗(yàn)證。
1 大基線分布式陣列孔徑雷達(dá)探測(cè)機(jī)理
相控陣?yán)走_(dá)的遠(yuǎn)場(chǎng)條件公式如下:
Lf≥2D2/λ
(1)
式中,Lf為目標(biāo)與雷達(dá)陣面的距離,D為雷達(dá)陣面口徑(或基線),λ為載頻波長(zhǎng)。對(duì)傳統(tǒng)單陣面雷達(dá),由于陣面口徑相對(duì)較小,因此遠(yuǎn)場(chǎng)條件較容易滿足;但對(duì)于分布式孔徑雷達(dá)而言,由于基線長(zhǎng),以1 km基線長(zhǎng)度為例,設(shè)雷達(dá)載頻為1 GHz,則Lf≥6 667 km,即目標(biāo)與陣列之間的距離超過(guò) 6 667 km時(shí)才滿足遠(yuǎn)場(chǎng)探測(cè)條件,故對(duì)低軌空間目標(biāo)和防空近程目標(biāo)而言均處雷達(dá)近場(chǎng)區(qū)域。
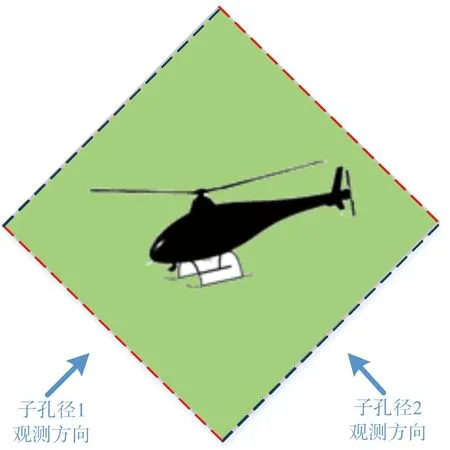
如圖1所示,分布式陣列探測(cè)近場(chǎng)目標(biāo)時(shí),各孔徑從不同角度向目標(biāo)發(fā)射信號(hào),在目標(biāo)處相參疊加。由于發(fā)射波束會(huì)在目標(biāo)區(qū)域附近發(fā)生交疊,對(duì)每個(gè)單子陣而言,可以通過(guò)匹配濾波將自身波束覆蓋的空域劃分為若干個(gè)距離單元(圖1中,紅色/藍(lán)色虛線劃分的分別為子陣1/子陣2的距離單元),因此通過(guò)各子陣距離單元之間的組合,可以將交疊區(qū)域劃分成若干更小的檢測(cè)元(圖中1~4區(qū)域),子陣接收各檢測(cè)元內(nèi)目標(biāo)的回波,并完成接收信號(hào)的相參疊加,從而實(shí)現(xiàn)對(duì)檢測(cè)元內(nèi)目標(biāo)的全相參探測(cè)。在全相參條件下,雷達(dá)的檢測(cè)信噪比相比單子陣提升N3倍(N為子陣數(shù)量)。
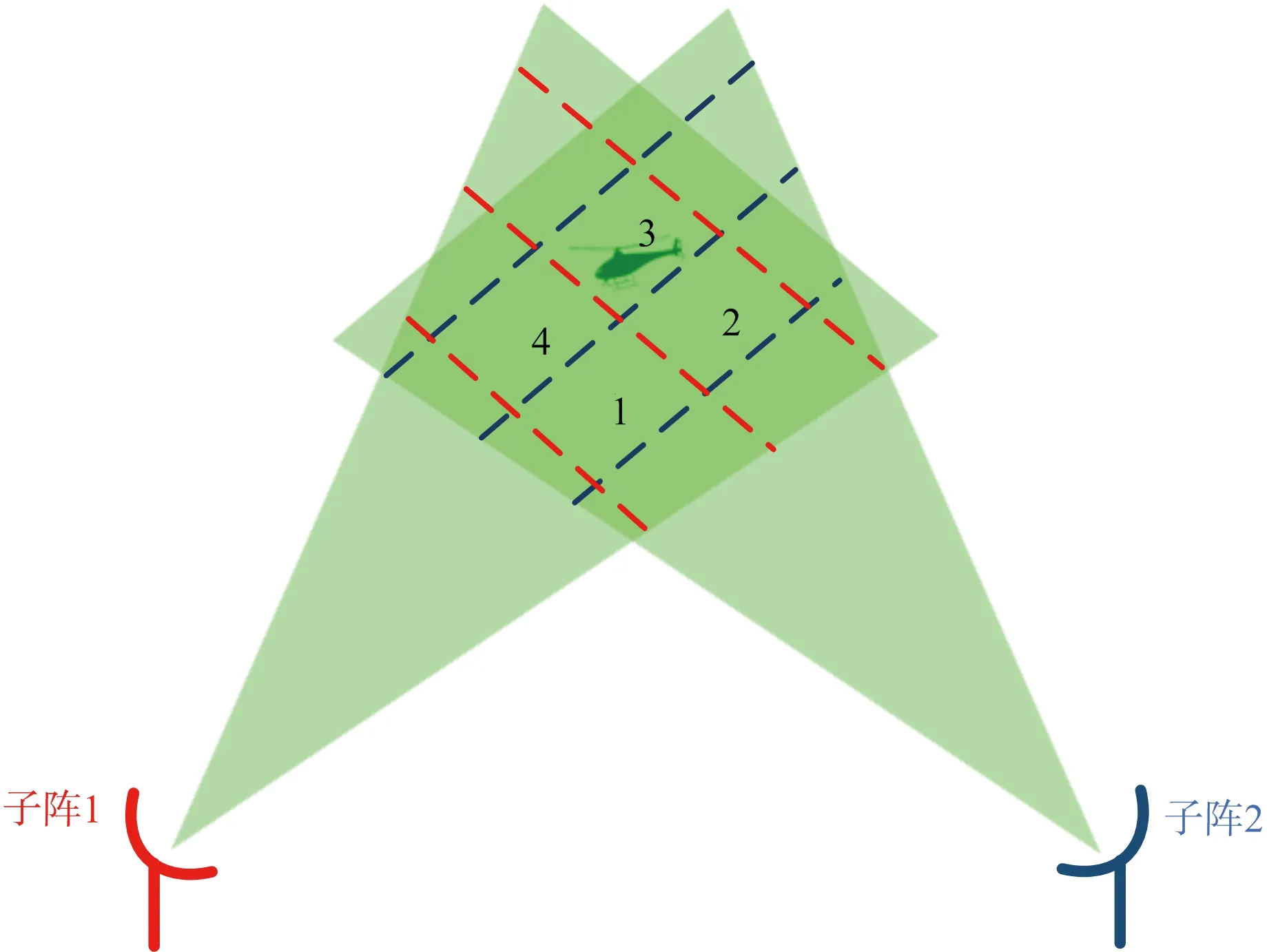
圖1 大基線分布式陣列探測(cè)過(guò)程中的波束交疊
但在實(shí)際應(yīng)用中,由于子陣對(duì)目標(biāo)的觀測(cè)角相差很大,當(dāng)檢測(cè)元內(nèi)的目標(biāo)形狀不是理想球體時(shí),目標(biāo)向不同子陣方向的散射回波相參性很差,無(wú)法在接收端進(jìn)行有效的相參積累,因此影響分布式陣列全相參探測(cè)的性能。下面對(duì)目標(biāo)散射特性進(jìn)行分析。
2 目標(biāo)散射特性分析
雷達(dá)通常工作在微波頻段,對(duì)這一頻段而言,飛機(jī)、導(dǎo)彈或艦船的散射通常均發(fā)生在光學(xué)區(qū),此時(shí)可以將復(fù)雜形狀目標(biāo)離散為若干個(gè)強(qiáng)散射點(diǎn),各散射點(diǎn)的回波之間相互獨(dú)立且各向同性,設(shè)第i個(gè)散射點(diǎn)的回波為
(2)
式中,Ai為散射點(diǎn)回波的振幅,f為回波頻率,ri為觀測(cè)點(diǎn)與散射點(diǎn)之間的距離,φ0(i)為散射點(diǎn)回波的初始相位。則復(fù)雜目標(biāo)的散射回波等效于這些強(qiáng)散射點(diǎn)的回波在不同方向上的矢量疊加:
(3)
對(duì)于任意散射方向,均可以確定一組與之唯一對(duì)應(yīng)的ri,進(jìn)而計(jì)算出各散射點(diǎn)在該方向上的散射回波。而一旦散射方向改變,對(duì)應(yīng)的ri也會(huì)發(fā)生變化,導(dǎo)致散射回波的幅值和相位發(fā)生改變。
以一組均勻分布散射點(diǎn)為例,分析散射回波與散射方向的關(guān)系。如圖2所示,設(shè)散射點(diǎn)均勻排布在一條直線上,散射點(diǎn)之間的距離為0.1λ,λ為雷達(dá)波長(zhǎng),d為雷達(dá)距離單元的長(zhǎng)度,A為回波信號(hào)的觀測(cè)點(diǎn),OA=1 000λ?d,θ為散射回波角。
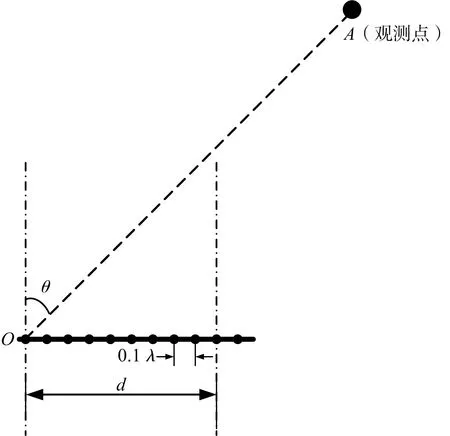
圖2 均勻分布散射點(diǎn)的散射回波 與方向之間的關(guān)系
當(dāng)d=10λ時(shí),單個(gè)距離單元內(nèi)包含的散射點(diǎn)數(shù)量為100個(gè),此時(shí)距離單元內(nèi)散射點(diǎn)回波在A點(diǎn)矢量和隨θ角的變化情況如圖3中綠色虛線所示。
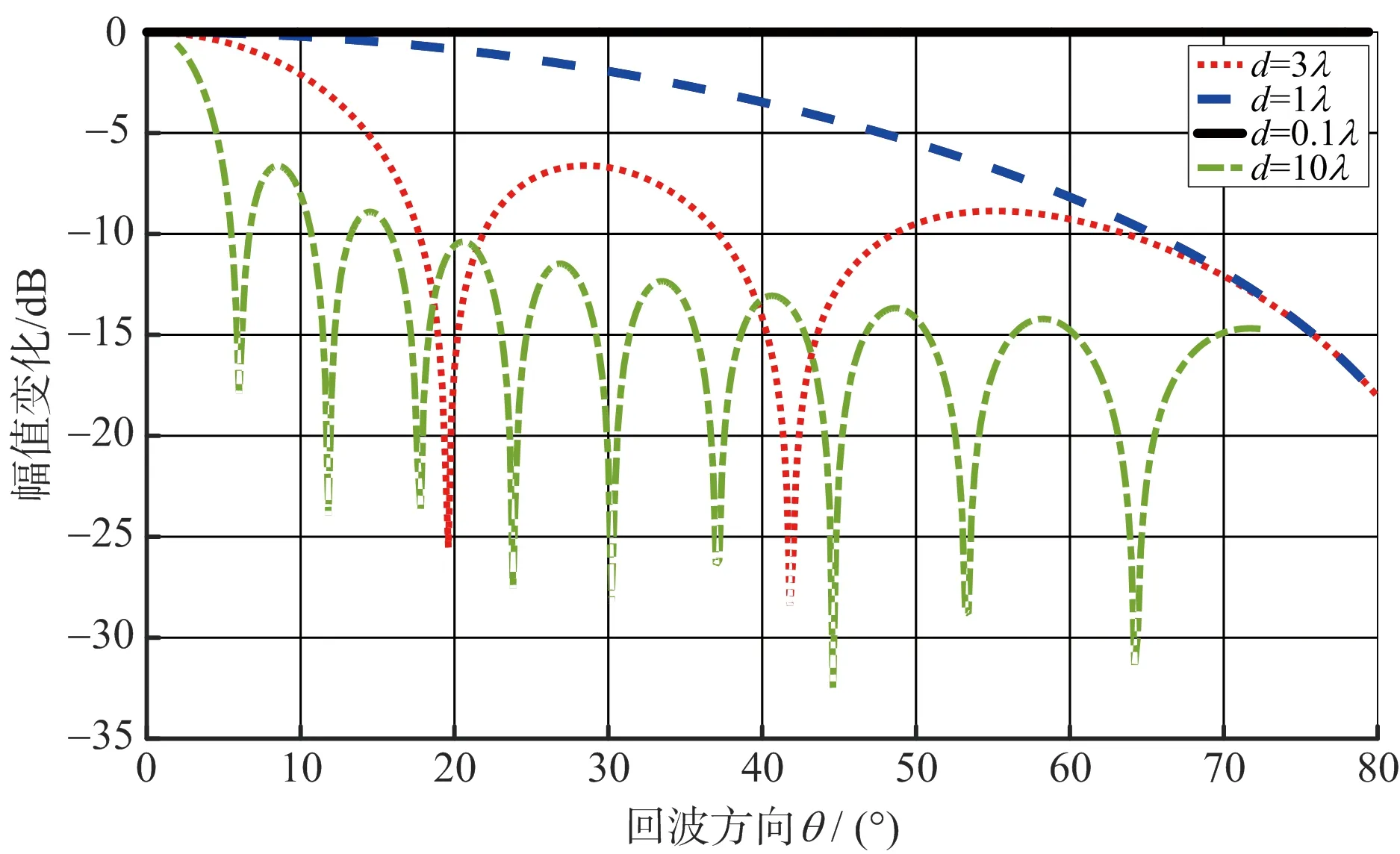
圖3 d=10λ時(shí)距離單元內(nèi)散射點(diǎn)回波在A點(diǎn)的 矢量和隨θ變化情況
可見,當(dāng)d=10λ時(shí),隨著觀測(cè)角θ改變,散射點(diǎn)在觀測(cè)點(diǎn)的總回波幅值有劇烈的變化:在θ從0°變化至10°過(guò)程中,回波幅值減小了約8.2 dB。這是由于隨著觀測(cè)角的改變,各散射點(diǎn)與觀測(cè)點(diǎn)之間的距離ri發(fā)生改變,觀測(cè)點(diǎn)處的散射回波矢量和也隨之變化,從而引起了回波幅相的起伏。因此對(duì)于復(fù)雜目標(biāo),目標(biāo)回波與散射方向強(qiáng)相關(guān)。
雷達(dá)的檢測(cè)是以距離單元為單位進(jìn)行的,可以預(yù)見,距離單元內(nèi)散射點(diǎn)數(shù)量將直接影響散射回波的幅相起伏特性,仍以上述均勻分布散射點(diǎn)為例,分別計(jì)算當(dāng)d=3λ、d=λ和d=0.1λ時(shí),距離單元內(nèi)散射點(diǎn)回波在A點(diǎn)的矢量和隨θ角的變化情況,如圖3中紅線、藍(lán)線和黑線所示。
可以看到,隨著d減小,由觀測(cè)方向改變引起的回波幅值變化也不斷減小:
當(dāng)d=3λ時(shí),在θ從0°變化至10°過(guò)程中,回波幅值減小了約2.1 dB;
當(dāng)d=λ時(shí),在θ從0°變化至10°過(guò)程中,回波幅值減小了約0.2 dB;
當(dāng)d=0.1λ時(shí),由于僅包含了1個(gè)散射點(diǎn),因此觀測(cè)點(diǎn)的回波幅值保持恒定,不隨θ變化。
由上述分析可知,隨著距離單元的減小,單元內(nèi)散射點(diǎn)數(shù)量減少,散射結(jié)構(gòu)簡(jiǎn)化,散射回波在不同方向上的相參性逐漸提高。
該規(guī)律同樣適用于分布式陣列雷達(dá)的近場(chǎng)探測(cè):以圖1中目標(biāo)所在檢測(cè)元為例,如圖4所示,當(dāng)雷達(dá)距離分辨率較低時(shí),整個(gè)目標(biāo)位于單個(gè)檢測(cè)元內(nèi),因此兩個(gè)子孔徑接收到的目標(biāo)回波不相參,當(dāng)增大雷達(dá)距離分辨率,將檢測(cè)元切割成若干尺寸更小的檢測(cè)元后,目標(biāo)在精細(xì)刻畫的二維檢測(cè)元地圖上便會(huì)出現(xiàn)一些強(qiáng)散射點(diǎn)(如A、B、C點(diǎn)),這些強(qiáng)散射點(diǎn)尺寸較小,且對(duì)不同子孔徑的散射回波相參性較強(qiáng),對(duì)這些強(qiáng)散射點(diǎn)的回波進(jìn)行相參積累,可以有效克服復(fù)雜目標(biāo)散射回波非相參問(wèn)題,提升分布式孔徑雷達(dá)全相參探測(cè)信噪比得益。下面對(duì)這一設(shè)想進(jìn)行仿真分析。
(a) 精細(xì)切割前的距離單元
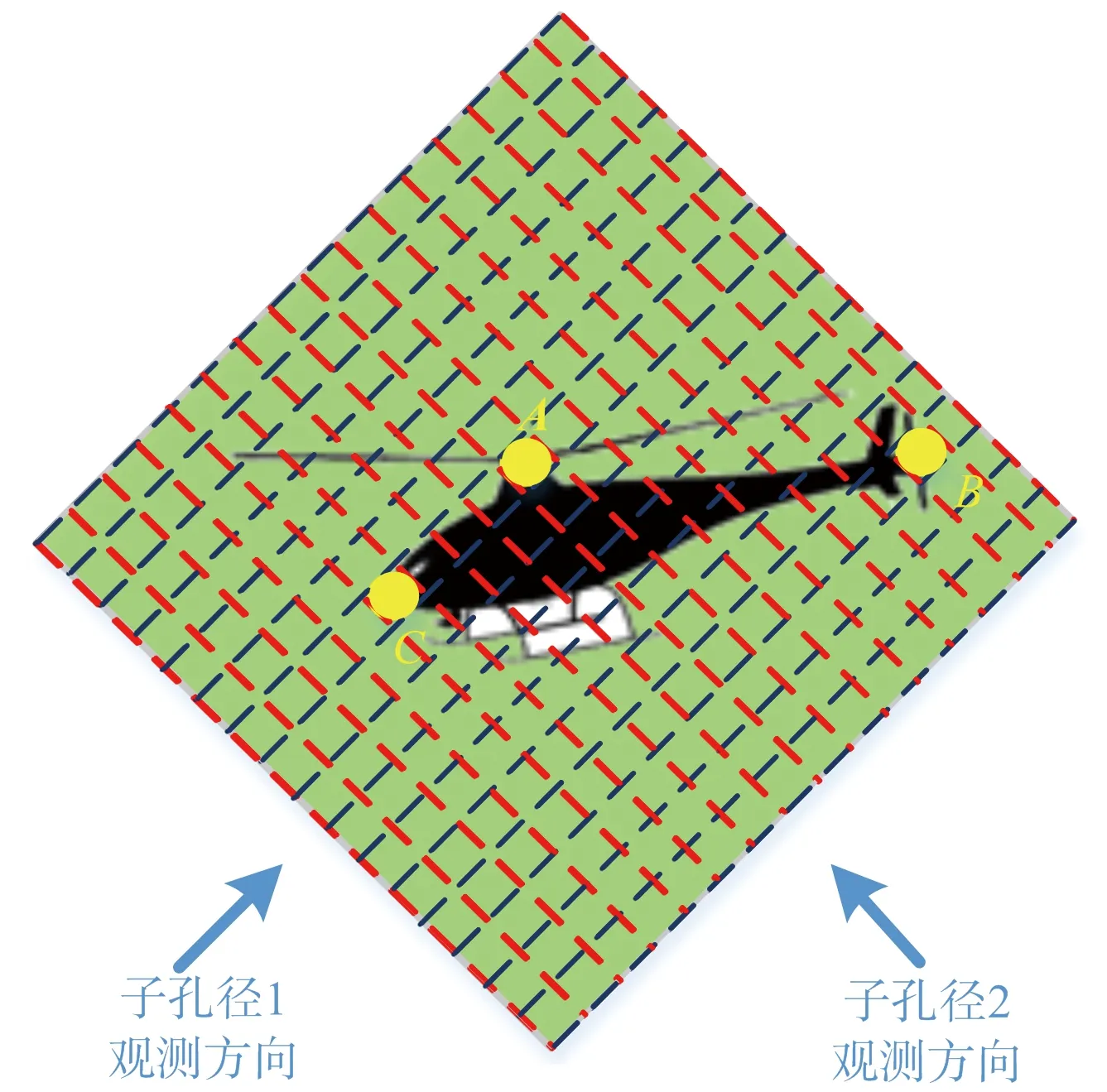
(b) 精細(xì)切割后的距離單元圖4 檢測(cè)元精細(xì)“切割”前后的散射點(diǎn)示意圖(A、B兩點(diǎn)處的螺旋槳轉(zhuǎn)軸和C點(diǎn)處的機(jī)頭外形旋轉(zhuǎn)對(duì)稱,故在不同方向上的散射回波相參性較高)
3 大基線分布式孔徑雷達(dá)近場(chǎng)目標(biāo)相參探測(cè)方法
在雷達(dá)探測(cè)中,距離分辨率由信號(hào)帶寬決定,信號(hào)帶寬越大,距離分辨率越高。因此,通過(guò)增大分布式孔徑的信號(hào)帶寬,便能有效提高目標(biāo)散射回波的相參性,進(jìn)而提升分布式孔徑相參探測(cè)的信噪比得益。
以螺旋槳模型為例對(duì)上述理論進(jìn)行仿真分析。建立二維螺旋槳模型如圖5所示,雷達(dá)頻率f=5 GHz,波長(zhǎng)為0.06 m,螺旋槳轉(zhuǎn)軸半徑r=5λ,翼展為50λ,與翼展方向垂直的方向?yàn)榉ň€方向,觀測(cè)方向OA與法線夾角為θ,且OA?λ。為方便,這里設(shè)距離單元的形狀為圓形,直徑為L(zhǎng)。
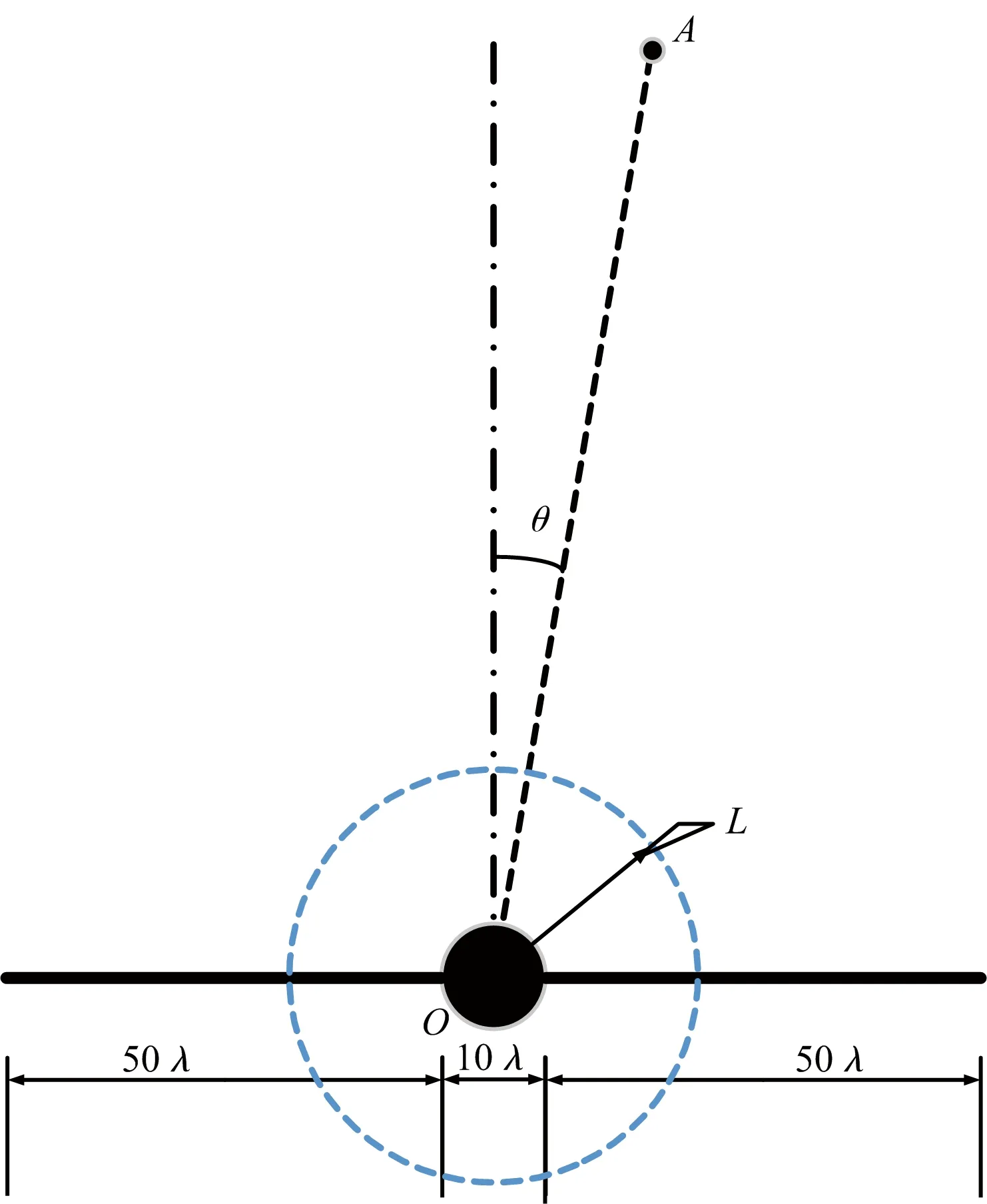
圖5 二維螺旋槳模型示意
在不同距離單元尺寸下,對(duì)不同觀測(cè)角下模型的散射回波幅相特性進(jìn)行仿真,得到結(jié)果如圖6所示,為便于展示,距離單元尺寸L的選取范圍為2r~3r。
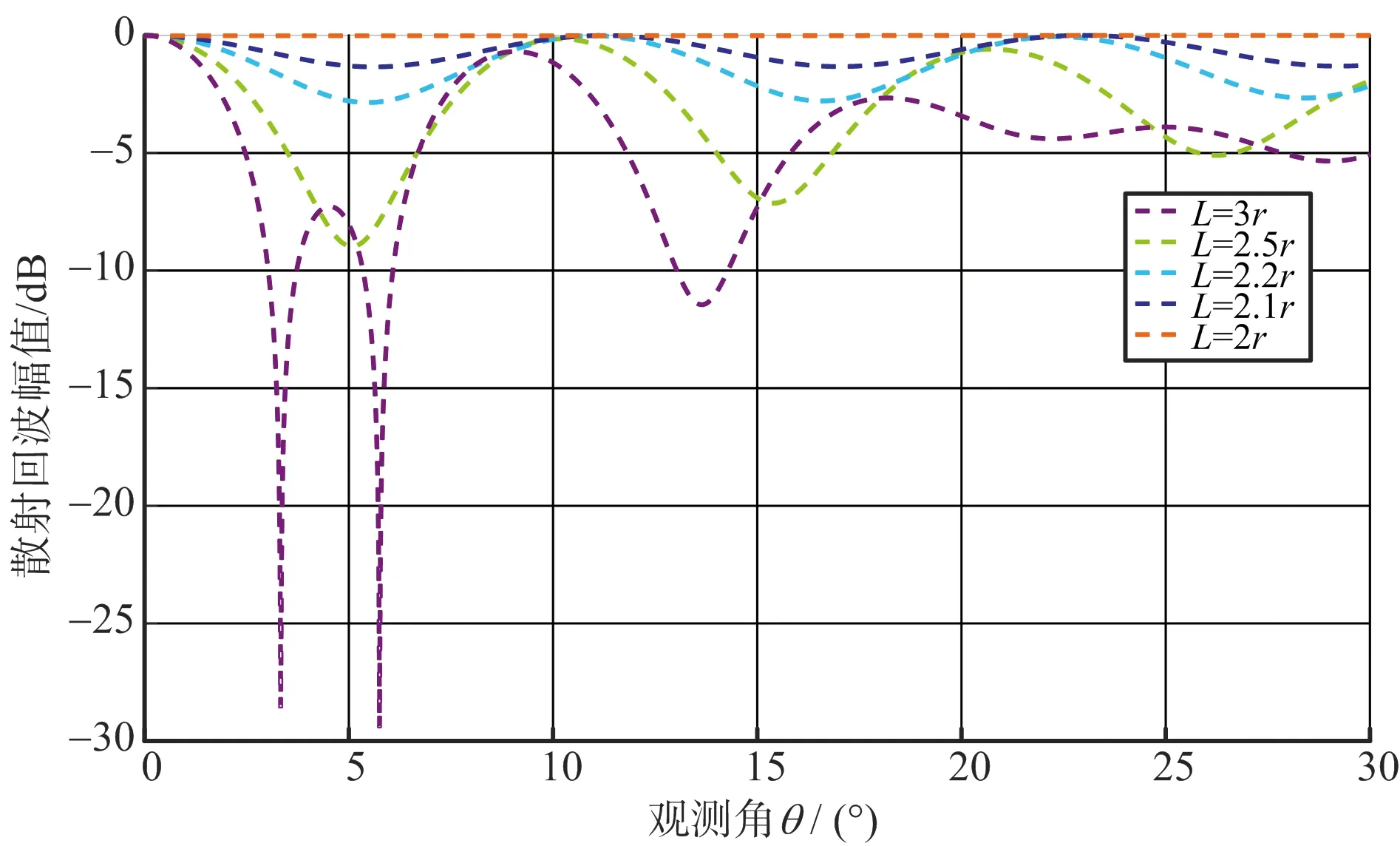
圖6 不同距離單元下散射回波幅值 與觀測(cè)角的關(guān)系
由圖6可見,當(dāng)L較大時(shí),距離單元內(nèi)包含了轉(zhuǎn)軸和部分旋翼結(jié)構(gòu),故當(dāng)觀測(cè)角θ改變時(shí),目標(biāo)散射回波會(huì)出現(xiàn)較大的幅值起伏,隨著L的減小,距離單元內(nèi)包含的旋翼長(zhǎng)度逐漸減小,散射回波幅值隨θ角的起伏也逐漸減小,當(dāng)L=2r時(shí),距離單元內(nèi)僅包含了轉(zhuǎn)軸結(jié)構(gòu),由于轉(zhuǎn)軸是完全對(duì)稱的,故此時(shí)距離單元內(nèi)的目標(biāo)散射回波幅值始終保持恒定,不再隨θ角改變。
仍以上述螺旋槳模型為例,仿真分析距離單元的大小對(duì)分布式陣列孔徑檢測(cè)效果的影響。雷達(dá)一般利用匹配濾波提高檢測(cè)前信號(hào)的信噪比,設(shè)回波信號(hào)為簡(jiǎn)單矩形脈沖Ax(t),A為信號(hào)幅值,則匹配濾波后的輸出信號(hào)為
(4)
式中,tp為回波信號(hào)的時(shí)長(zhǎng)。可見,回波信號(hào)的幅值越大,則匹配濾波后輸出信號(hào)的峰值就越高,越有利于目標(biāo)的檢測(cè)。
設(shè)現(xiàn)有5個(gè)分布式子孔徑對(duì)圖5中的距離單元進(jìn)行觀測(cè),其觀測(cè)角θ分別為4°,7°,10°,13°和16°,雷達(dá)波形為簡(jiǎn)單矩形脈沖。各距離單元回波被5個(gè)子孔徑接收后,經(jīng)相參疊加和匹配濾波,隨后進(jìn)行檢波。由于距離單元內(nèi)包含了旋轉(zhuǎn)關(guān)節(jié),按照上述理論,5個(gè)子孔徑回波信號(hào)的相參性會(huì)隨L變化而發(fā)生改變,L越小,相參性越好。

圖7 L取不同值時(shí)分布式孔徑雷達(dá)對(duì)各距離單元內(nèi) 信號(hào)的檢波前幅值
圖7給出了距離單元直徑L取不同值時(shí),分布式孔徑雷達(dá)對(duì)距離單元內(nèi)信號(hào)經(jīng)相參疊加和脈壓后獲得的檢波前幅值情況,其中0號(hào)距離單元包含旋轉(zhuǎn)關(guān)節(jié)和部分螺旋槳的回波信號(hào),其余距離單元只含噪聲。從圖7可以看到:隨著L逐漸減小,各子孔徑接收到的回波信號(hào)經(jīng)相參疊加和脈壓后的幅值逐漸升高,并在L=2r時(shí)達(dá)到最高值,此時(shí)的檢波前信號(hào)幅值相比L=4r時(shí)提高了大約8.5 dB,其余距離單元的回波幅值則沒有明顯變化趨勢(shì)。這是由于隨著雷達(dá)分辨率提高,0號(hào)距離單元內(nèi)的目標(biāo)“形狀”越來(lái)越接近理想球體,分布式陣列接收到的回波相參性逐漸提高,相參積累和匹配濾波后的信噪比也逐漸提升。仿真結(jié)果驗(yàn)證了本文的理論:通過(guò)提高大基線分布式陣列雷達(dá)的距離分辨率,在空間中將復(fù)雜目標(biāo)“切割”成若干個(gè)強(qiáng)散射點(diǎn),并對(duì)這些強(qiáng)散射點(diǎn)的回波進(jìn)行相參積累,可以有效克服復(fù)雜目標(biāo)散射回波非相參問(wèn)題,提高分布式陣列近場(chǎng)全相參探測(cè)的信噪比得益。
4 結(jié)束語(yǔ)
大基線分布式孔徑陣列內(nèi)各子陣對(duì)目標(biāo)的觀測(cè)角相差很大,當(dāng)檢測(cè)元內(nèi)目標(biāo)形狀不是理想球體時(shí),不同子陣接收到的散射回波并不相參,影響分布式陣列收發(fā)全相參探測(cè)的性能。本文在大基線分布式孔徑雷達(dá)近場(chǎng)下,通過(guò)分辨單元精細(xì)刻畫,將大散射點(diǎn)目標(biāo)變?yōu)橛扇舾蓚€(gè)強(qiáng)散射點(diǎn)組成的“多目標(biāo)”,進(jìn)而對(duì)各強(qiáng)散射點(diǎn)回波進(jìn)行相參積累。仿真結(jié)果表明,目標(biāo)散射回波在大觀測(cè)角下的相參性得到有效改善,分布式陣列孔徑對(duì)目標(biāo)回波的檢測(cè)信噪比得到顯著提升。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25