基于支持向量機的智能輪胎路面辨識算法*
2021-01-13 11:14:14梁冠群危銀濤
汽車工程 2020年12期
王 巖,梁冠群,危銀濤
(清華大學車輛與運載學院,北京 100084)
前言
輪胎是車輛與道路接觸的唯一部件,傳遞著車輛運動所需的力和力矩,對車輛的動力性、安全性、舒適性、經濟性等方面有重要影響。輪胎本質上是一個“被動”的部件,在車輛運動過程中,輪胎受到的力和力矩均無法直接進行獲取。然而隨著電子信息技術和微型傳感器技術的發展,智能輪胎這一概念應運而生,通過在輪胎內部植入傳感器,可實現對輪胎、車輛乃至道路信息的監測[1]。
近年來,智能輪胎技術逐漸受到各國研究學者的關注,各種類型的傳感器被用來構建智能輪胎系統,包括光學傳感器[2]、磁傳感器[3]、壓電傳感器[4]、表面聲波傳感器[5]、加速度傳感器[6]。其中,加速度傳感器性能優良且加速度信號本身所蘊含的信息豐富,因此加速型智能輪胎被廣泛研究。通過加速度信號可以實現多種參數的辨識監測,包括輪胎的六分力[7-9]、輪胎的振動噪聲[10]、輪胎的水滑[11]、輪胎-道路的附著情況[12]等。而智能輪胎技術的核心在于將傳感器測量的運動學信息轉化為車輛底盤系統真正需要的輪胎力信息和輪胎-路面接觸作用信息。而車輛控制系統中最重要的信息之一是輪胎-路面間的峰值摩擦因數。
傳統的輪胎-路面附著系數辨識方法的核心基于車輛動力學模型和精確的輪胎模型。通過測量整車的狀態參數(車速、橫縱向加速度、橫擺角速度),利用各種觀測方法(如遞歸最小二乘、卡爾曼濾波、粒子濾波),估算出輪胎的各項參數,包括輪胎力、輪胎側偏角、輪胎滑移率。通過估算的參數,利用輪胎模型或滑移特性曲線,估算路面的附著曲線[13]。這本質上是一種間接的觀測手段,所以該方法有諸多局限性,如:輪胎在小滑移、小側偏角情況下,準確度不高,缺乏有效的觀測手段;車輛模型和輪胎模型的復雜程度導致了觀測器設計復雜,無法調和復雜度與估測準確度之間的矛盾;不同的估算方法適用范圍有局限性,缺乏普遍適用的有效方法。
而目前基于智能輪胎的摩擦因數研究,大多是首先利用智能輪胎實現輪胎力的估算,以取代基于整車信號觀測的輪胎力,隨后采用同樣的算法利用輪胎模型或滑移特征實現摩擦因數的估算[12]。這本質上仍然屬于一種間接的手段,并不是直接通過智能輪胎的信號判斷路面的狀態。因此,本文中直接通過智能輪胎的加速度信號,以輪胎的動態響應為紐帶,將路面狀態與智能輪胎測試信號進行聯結,完成路面的分類辨識。
本文中基于加速度傳感器開發了智能輪胎系統和產品樣機,并進行實車場地試驗,采集智能輪胎徑向、側向加速度信號;應用統計特征參數提取加速度的時頻域特征,并采用主成分分析法對特征參數進行降維;基于主成分參數,利用支持向量機進行訓練,選取最優的支持向量機參數并利用其實現道路附著情況的分類識別。
1 智能輪胎系統設計與實車測試
1. 1 智能輪胎硬件系統設計
由于加速度信號不僅能夠反映輪胎的動力學信息,而且可以提供輪胎本身的振動信息;而本文中需要通過輪胎的動態響應來推斷輸入的道路信息,因此基于MEMS 三軸加速度計開發了智能輪胎系統。本文中選取了美國亞德諾公司(Analog Devices)生產的ADXL372 數字型三軸MEMS 加速度傳感器。該型號加速度計尺寸小(3 mm×3.25 mm×1.06 mm)、質量輕(0.3 g)、量程高(±200g)、功耗低和系統穩定等特點使其能夠滿足輪胎內部測量的嚴苛要求。智能輪胎的硬件系統構架如圖1 所示。
所構建的智能輪胎系統分為采集器和控制器。采集器采集三向加速度、胎壓、胎溫等參數,通過藍牙無線傳輸至控制器的接收端。控制器可以進行數據的存儲與分析,以實現智能輪胎不同的應用功能。信號采用無線方式傳輸,避免了不必要的線束、輪胎和輪轂的改造;采用可以無線充電的鋰電池進行能量供給,避免智能輪胎系統的頻繁拆卸,從而使系統使用更加便捷。
采集器與控制器 MCU 均選用德州儀器的CC2640 芯片,該芯片為2.4 GHz RF 器件,符合藍牙低功耗(BLE) 4.2 規范,可以實現數據的藍牙傳輸。藍牙4.2 傳輸速率最大為1 Mbps,而傳感器采樣頻率為2 kHz,每秒傳輸的加速度、氣壓、溫度數據量為:5×2000×8 bit=8×104bit。因此藍牙傳輸速率滿足使用需求。
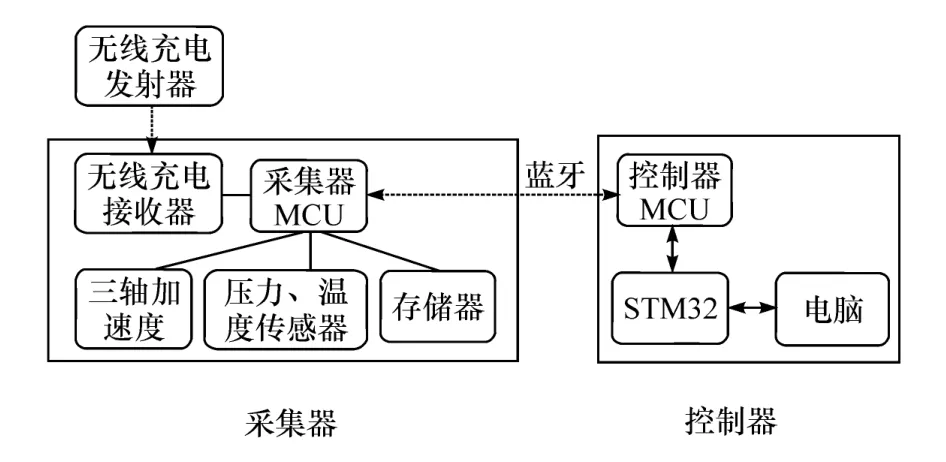
圖1 智能輪胎硬件系統構架
智能輪胎輪端采集模塊如圖2 所示,將智能輪胎采集系統進行封裝,并設計相應的橡膠套件予以固定,橡膠套用特制的膠水粘貼在輪胎內壁。仿真與測試表明:這種固定方式具有很高的可靠性,避免了傳感器的脫落與損壞。加速度傳感器粘貼位置為輪胎內襯中央。
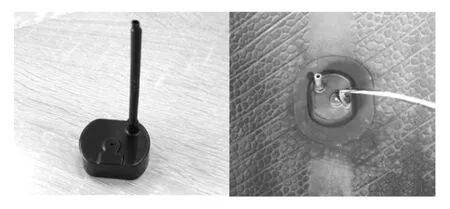
圖2 智能輪胎輪端采集模塊
圖3 為智能輪胎系統的車端模塊,它可以實現數據的存儲和下一步的分析,或對數據實時處理并對結果進行顯示。
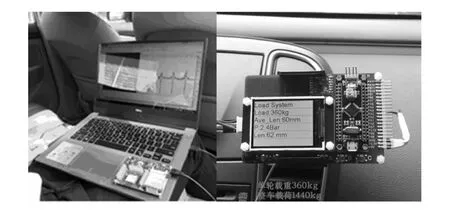
圖3 智能輪胎車端系統
本文中選用205/55R16 型號輪胎。隨著輪胎的滾動,傳感器的位置不斷變化,采集得到的三向加速度是在其隨動坐標系下定義的,分別為:徑向加速度,周向加速度和側向加速度。測試結果如圖4所示。
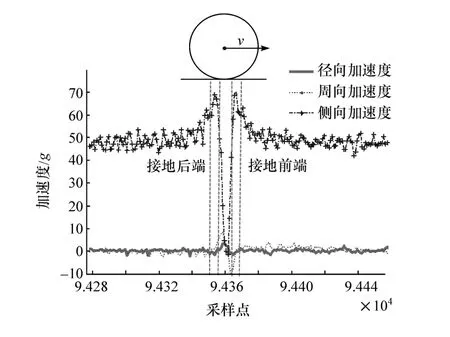
圖4 智能三向加速度
可以發現三向加速度均存在明顯的波動,加速度的波動與輪胎-路面的接觸作用密切相關。加速度的數值變化和峰值與接地處輪胎發生的彈性變形直接相關。接地過渡端輪胎徑向曲率的變化、胎面彈性體的壓縮與拉伸、帶束側向的彎曲變形均是導致加速度變化的重要因素。同時加速度本身作為一種振動信號,其在頻域內的特性同樣能夠提供更多關于輪胎與道路相互作用的豐富信息。基于此對智能加速度信號進行分析處理,以推斷路面的附著特性,具有可行性。
1.2 實車測試與信號分析
將搭建好的智能輪胎系統裝配在測試車輛上,并分別在3 種不同附著情況的路面進行測試。如圖5 所示,測試車輛為Dufournier 公司的Skid Trailer 拖車,該款拖車可以在真實路面上進行輪胎六分力測試。

圖5 輪胎測試拖車
設定標準載荷400 kg,輪胎氣壓240 kPa,車速控制在30~50 km/h 附近穩定直線行駛。標準試驗的目的是為了研究不同路面對信號造成的影響,因此算法開發階段僅將路面的附著特性作為變量。選取3 種不同的路面進行測試,其峰值附著系數如表1所示,分別對應著高、中、低附著特性。
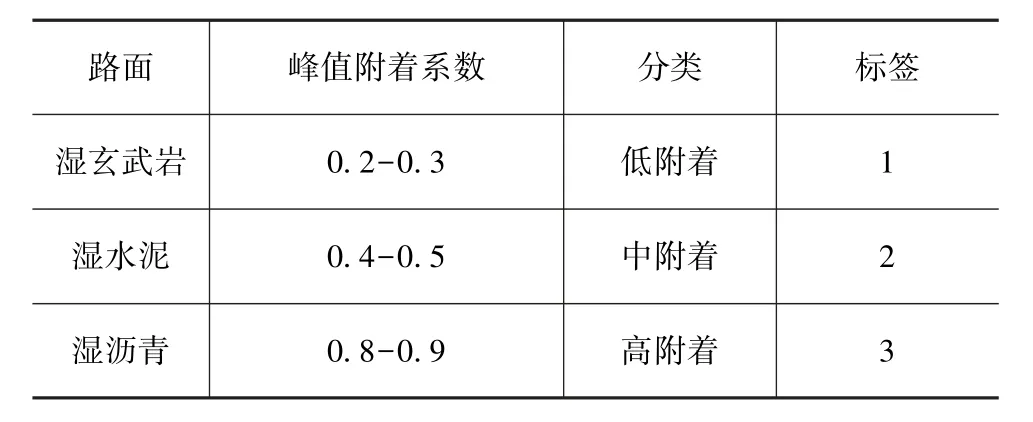
表1 路面附著情況
本文中所提出的利用智能輪胎信號辨識路面情況的思路為:不同類型的路面輸入必然會引起不同的輪胎-路面作用關系,進而引起輪胎時域頻域響應的差異。基于此,針對不同附著特性路面引起的智能輪胎加速度,進行差異特征識別,從而實現路面特征的分類識別。
本文中重點研究直線行駛工況下的路面辨識算法。在智能輪胎的三向加速度中,徑向加速度幅值最大,特征最為明顯;同時路面的激勵也主要影響輪胎的徑向變形和徑向加速度。因此選取徑向加速度作為主要的輸入數據。如圖6 所示,在低附著路面和高附著路面下,智能輪胎測量的徑向加速度存在明顯差異。與高附著路面相比,低附著路面的徑向加速度在非接地區域噪聲更大,同時低附著路面的高頻振動成分更多。

圖6 智能輪胎徑向加速度
車輛直線行駛時,雖然輪胎側偏角為零,輪胎的側向加速度卻不等于零,這與輪胎的偽側偏效應密切相關。同時考慮到車輛行駛過程中經常需要輕微修正轉向盤,這也會引起輪胎的小側偏角和側向加速度。由于側向加速度可以反映輪胎的側偏特性,直線穩定行駛與小側偏角工況是目前傳統路面附著系數估算方法的盲區,因此引入側向加速度作為另一個重要的輸入參數,可以實現信息的補充。與徑向加速度類似,不同路面條件下的側向加速度同樣存在差異。
因此本文中最終選擇徑向和側向這兩軸加速度進行差異特征識別。由于輪胎-路面的相互作用機理復雜,不同的路面對于加速度信號的影響程度難以用統一的數值指標衡量。本文中首先從加速度信號提煉出關鍵的特征參數,隨后引入支持向量機方法對信號進行分類和預測,從而實現路面情況的判別。
2 信號特征參數提取與降維
2.1 特征參數提取
首先對加速度信號進行預處理,通過筆者所在團隊的前期研究發現[7],加速度的大小與輪胎滾動速度的平方呈正比關系,因此剔除滾動速度的影響,使加速度信號在統一的量綱內進行分析:

式中:a(t)為加速度為歸一化后的加速度;Ω為滾動速度。
首先對智能輪胎加速度信號進行小波變換,并選取第一近似信號a1和第一細節信號d1作為代表不同頻段的頻域特征。如圖7 所示,↓2 和↑2 分別表示以2 位倍數進行下采樣和上采樣;h(t)和g(t)分別為低通與高通濾波器。本文中采用離散小波變換,由于選取不同的小波基將會導致不同的變換結果,而對于如何選取恰當的小波基函數,現在并無定論,因此本文中小波基函數通過試湊選取。小波變換的主要目是對智能輪胎信號的高頻與低頻部分進行針對性的分析處理。

圖7 小波變換過程
以低附著路面的徑向加速度為例,其時域信號如圖6(a)所示,小波變換后的近似信號和細節信號如圖8 所示。
根據前文分析可知,在不同附著特性的路面激勵下,智能輪胎加速度響應在時域和頻域中均會存在較大的差異。通過小波變換最終得到徑向加速度和側向加速度的時域信號、細節信號和近似信號,并引入統計特征對信號的關鍵特征予以提取[14],如表2 所示,f1~f15分別代表:最大值、最小值、均值、峰-峰值、整流均值、方差、峰值、方根幅值、均方根、波形因子、峰值因子、峭度因子、脈沖因子、偏斜度和裕度因子。這些特征可以反映加速度信號的特征和概率分布特征。
其中,x(n)為輪胎滾動一圈采集所得到的加速度序列,N為一圈信號點總數。以徑向加速度的時域信號為例,提取得到的特性參數屬性分布如圖9所示,其中特征參數 1-15 對應f1~f15。

圖8 徑向加速度的近似信號和細節信號
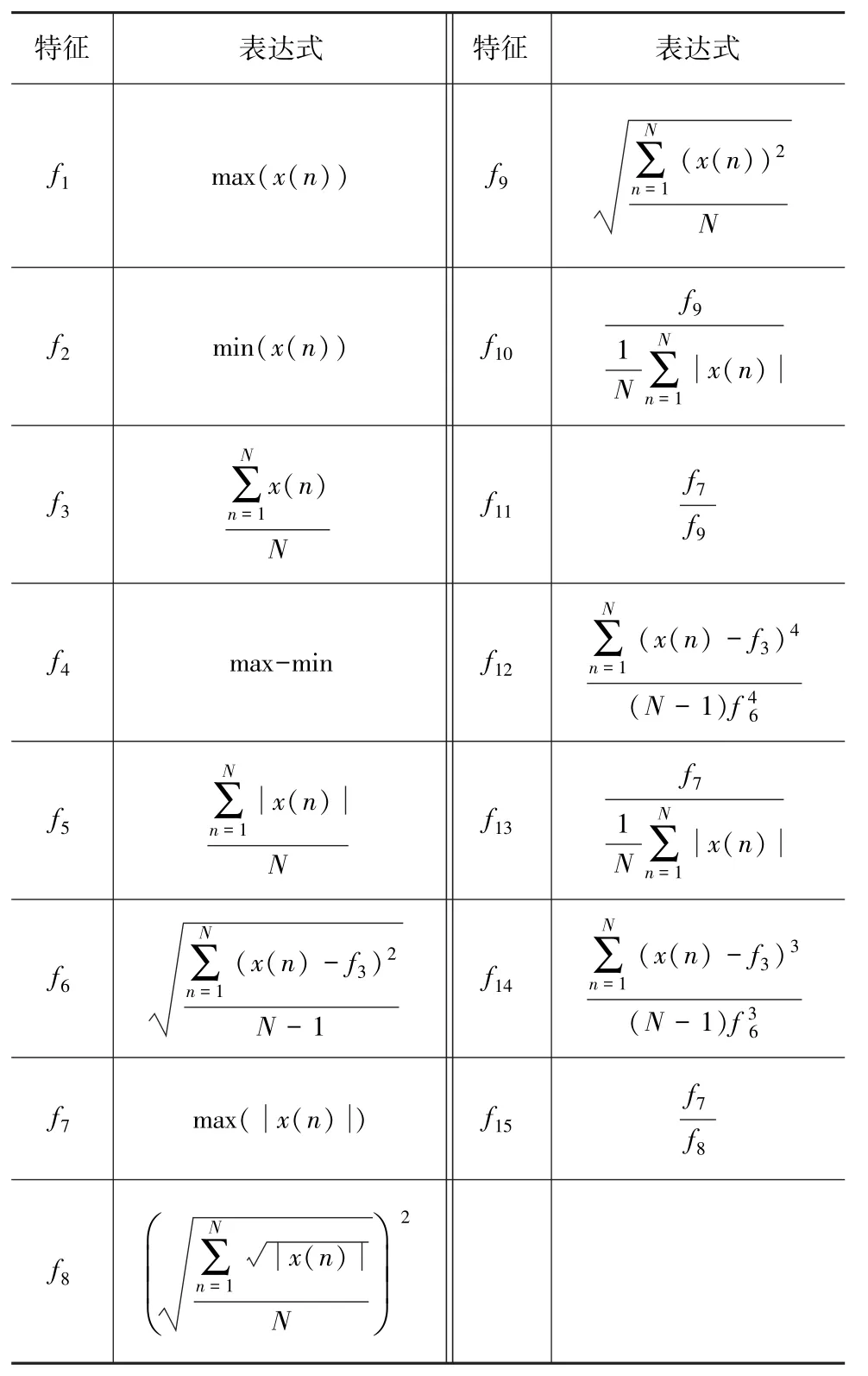
表2 特征參數表
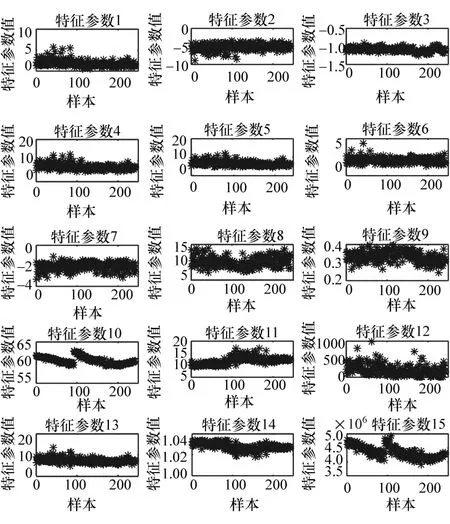
圖9 特征參數屬性值分布
在進一步處理前,需要對特征參數進行歸一化預處理,將不同量綱的數據統一在相同的數量級下,加快梯度下降求解速度,同時在一定程度上提高精度。歸一化映射如下所示:
然而并不是所有的特征均能有效地進行路面的分類辨識;徑向與側向加速度的時域、低頻、高頻信號分別提取15 個特征,共計90 個特征參數,維度過多。為了降低運算復雜度,避免后續分類可能出現的維數災難,在分類辨識前須進行降維,以提高計算效率。
2.2 主成分分析法降維
本文中采用主成分分析法進行降維[15],主成分分析法的步驟如下。
(1)獲得n次試驗數據組,每次數據組通過上述方法提取了在時域和頻域內的p項指標,分別為:X1,X2,…,Xp,從而得到樣本數據矩陣X。
(2)計算樣本數據矩陣的協方差矩陣:

(3)計算協方差矩陣的特征值λ1,λ2,…,λp和特征向量u1,u2,…,up。
(4)將特征值從大至小進行排列,以特征值對應的特征向量為系數將指標X1,X2,…,Xp線性變化,得到重構后的主成分:F1,F2,…,Fm(m≤p),變換矩陣為TT=(u1,u2,…,up)。其貢獻率也是按照從大至小排列。
(5)計算前k個主成分的累計貢獻率:η(k)=根據實際需求,設定累計貢獻率門限值以確定前k個主成分。
(6)計算得到的F=TTX的前k個主成分即為降維后的主成分。
根據上述的主成分分析法(principal component analysis,PCA),對上文中提取的90 個特征參數進行降維。本文中以90%為累計貢獻值門限值,最終提取了10 個主要的成分,如圖10 和圖11 所示。
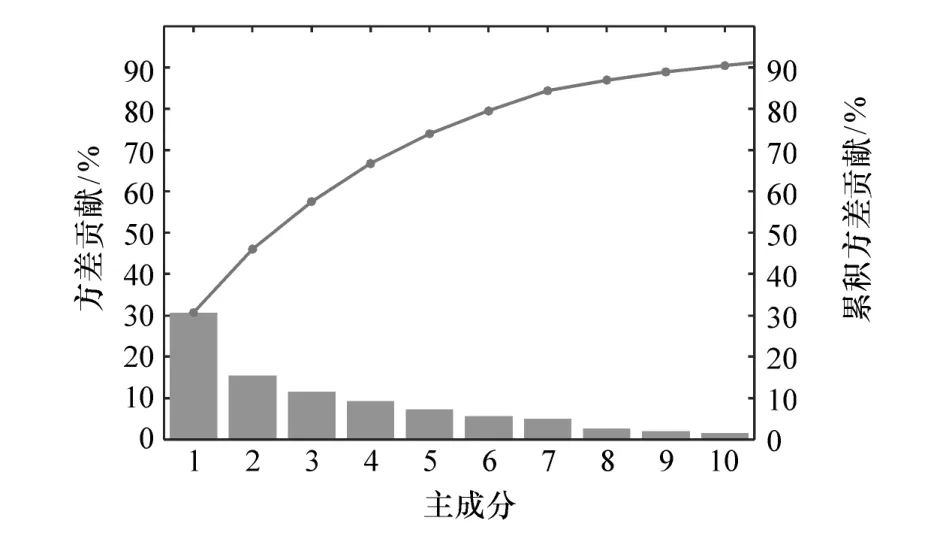
圖10 主成分分析法降維處理
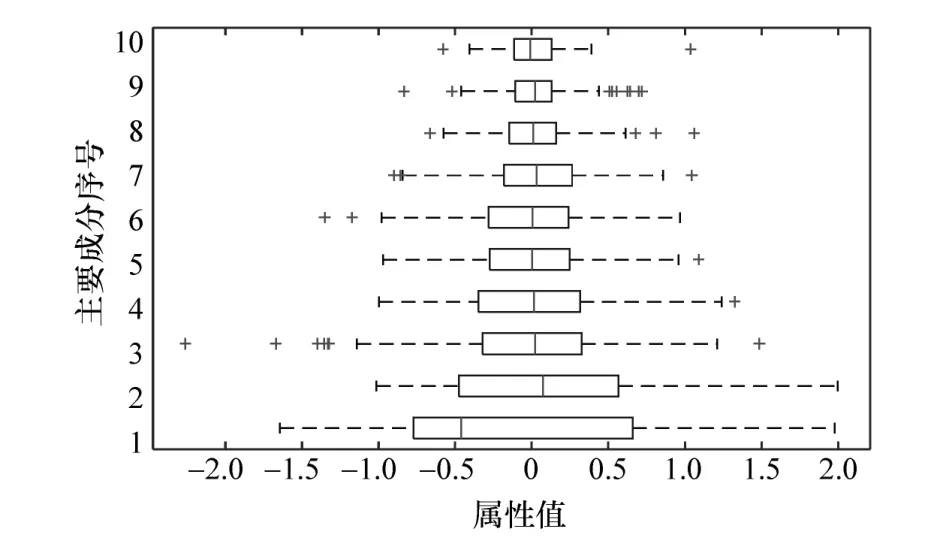
圖11 特征參數主成分屬性
通過PCA 方法可以有效減小特征參數的維度,同時也能反映大部分原有特征參數的信息。下一節中將基于PCA 降維后的主成分參數,引入支持向量機分類器對路面狀態進行預測判斷。
3 支持向量機分類器參數優化
3.1 支持向量機原理
支持向量機(support vector machines,SVM)方法作為機器學習中的一種,首先用于解決二分類問題,將分類問題轉化為不等式約束下的凸二次規劃問題,與神經網絡、模糊邏輯方法相比,有著更加可靠的數學原理支撐[15]。對于多分類的問題可以采用“一對一”、“一對多”、“二叉樹”等方法;而對于非線性問題,則可以將樣本空間映射到高維度空間進行計算,并引入核函數,避免在高維度空間直接內積造成運算規模過大。本文中不對SVM 的原理進行贅述,目前已有相關的軟件包支持 SVM 方法,如LIBSVM[16]。
SVM 具有較強的泛化能力,即機器算法對新鮮樣本的適應能力。學習的目的是挖掘隱含在數據背后的規律,對具有同一規律的學習集以外的數據,經過訓練的網絡也能給出合適的輸出。由于僅僅通過大量試驗去進行測試,并對數據進行訓練,以求囊括所有類型的路面并不現實,因此選用具有學習和泛化能力的SVM 算法,以發掘不同路面激勵下的輪胎動態響應參數的規律,實現路面的分類。
3.2 支持向量機參數優化
SVM 算法中最影響分類效果的兩個參數為懲罰因子和核函數系數,本文中選擇高斯核函數:

對于懲罰因子C而言:C值越大,對分類誤差的懲罰越大,從而越容易造成過擬合;而C值越小,越容易欠擬合。而高斯核函數參數γ會影響支持向量對應的高斯函數作用范圍,進而影響泛化性能。γ值越大,高斯函數越作用于支持向量樣本附近,對未知樣本的分類效果則越差。因此選擇合適的懲罰因子C和高斯核函數γ參數值,對SVM 分類準確率至關重要。
首先采用 K-CV 方法(K-fold cross validation),將原始數據集分為K組:每個單獨的組分別作為一次測試組,其余 (K-1) 組作為訓練組,從而得到K個模型,并用這K個模型的分類準確率的平均值作為評判分類器的指標。
隨后采用網格搜索法尋找最優的參數值,其基本原理是使參數C和γ在一定范圍內不斷變化,從而遍歷所有取值,利用取得的參數值進行訓練預測,取準確率最高的參數值為最終的最佳參數。由于全部遍歷非常耗費時間,因此可以首先在較大的范圍內采用大步距進行粗略的搜索,得到參數C與γ最佳取值的大致位置;然后在大致位置附近減小步距進行細致的搜索。圖12 為網格搜索法得到的準確率3D 圖,最終可以得到最優的C與γ參數值。
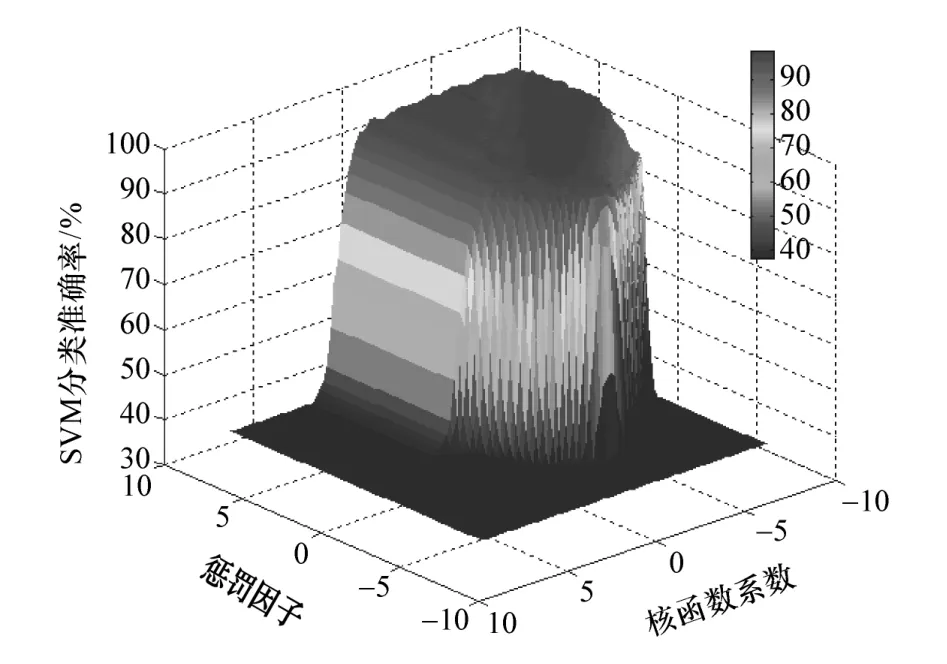
圖12 網格參數搜索法準確率3D 圖
4 路面分類辨識算法與結果分析
4.1 路面辨識算法流程
綜上所述,本文中提出的利用智能輪胎加速度信號的路面辨識方法流程如下:
(1)采集智能輪胎信號(徑向、側向加速度);
(2)輪胎每滾動一周期劃分為一個樣本序列,并剔除滾動速度的影響,將信號歸一化;
(3)利用小波變換,提取加速度信號的時域和頻域信號,并利用統計特性提取特征參數;
(4)利用PCA 方法進行降維,得到累計占比90%的主要成分參數;
(5)基于特征參數,用訓練完畢的SVM 分類模型,進行路面判別分類。
路面識別流程如圖13 所示。
4.2 路面分類結果與分析
通過上文所述的網格搜索法,得到最優的支持向量機參數,其中C取 0.5,γ取 1。如圖 14 所示,路面分類1,2,3 分別對應低附著、中附著和高附著3種不同峰值摩擦因數的路面標簽,分類器對于訓練樣本可以實現非常好的分類效果,清楚地區分了低附著、中附著和高附著3 種路面。
圖15 所示為一道路切換工況,車輛從一高附著路面穩定直線行駛,駛入低附著路面。通過智能輪胎采集的加速度信號,利用本文所提出的PCA-SVM數據分析流程,對于道路狀態進行判斷分類。結果表明,所提出的方法能夠準確可靠地識別道路的狀態,對于路面附著情況予以分類判斷。

圖13 基于PCA-SVM 的路面分類算法流程圖
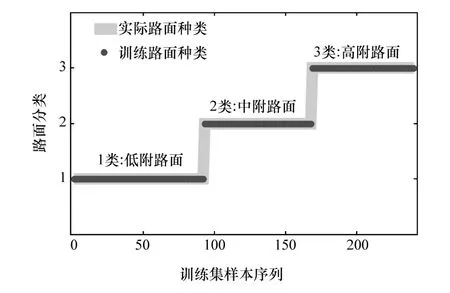
圖14 訓練集分類結果
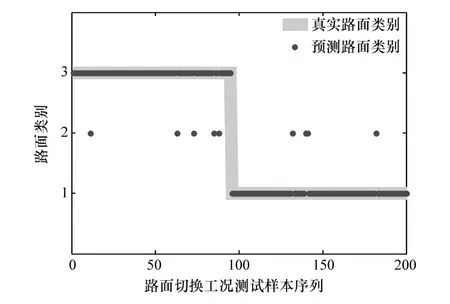
圖15 路面切換預測結果
較之傳統的路面附著系數判斷方法,本文所提出算法的特點和優勢如下。
(1)根據圖12 可知,輪胎每滾動一圈采集相應的加速度數據,并根據所提出的PCA-SVM 數據分析處理流程進行路面附著系數等級的判斷。如圖14 所示,在道路切換過渡區域,理論上僅須憑借輪胎滾動一圈的測試數據即可完成路面狀態的判斷。以205/55R16 輪胎為例,假設車輛以中等車速50 km/h行駛,則僅需約0.14 s 便可完成判斷。因此基于智能輪胎的判斷預測方法響應迅速。
假設道路切換處路面類型判斷準確,則該測試條件下的準確率為95.5%,表明所提出的算法具有很高的辨識精度。
(2)本文中提出的加速度計型智能輪胎,直接測量輪胎內部的振動信號,直接反映了輪胎與道路間的相互作用。從不同附著特性的道路激勵入手,基于智能輪胎加速度信號的統計特征,實現路面狀態的辨識。而傳統的辨識方法則基于車身傳感器和車輛、輪胎模型:一方面該方法測量的信號更加間接,另一方面算法的精度受到車輛與輪胎模型精度、復雜度的影響。盡管可以估算得到一個具體的附著系數數值,但上述兩種因素的干擾導致其存在一定的誤差。因此,基于智能輪胎的路面附著系數辨識算法更加直接可靠。
(3)傳統的路面附著系數辨識方法須基于輪胎模型,一種基于輪胎的側偏特性,即α-Fy曲線,另外一種基于輪胎的滑移曲線,即μ-s曲線。因此該算法僅適用于加速、制動和轉向工況。而實際車輛大多處于穩定直線行駛和小側偏角工況,傳統的算法使用場景局限性太大,限制了其推廣使用。而本文中提出的基于加速度信號,應用機器學習算法的路面辨識方案普適性更強,更具有工程應用前景。
(4)本文中提出的支持向量機方法具有完備的理論支撐,最終可以轉換為二次規劃問題,與神經網絡、模糊邏輯方法相比,有著更加可靠的數學原理支撐。支持向量機的輸入特征參數是由從智能輪胎加速度信號的統計特征計算得到的,反映的是輪胎在不同附著特性路面下的時頻響應,因此本文的方法也具有物理原理支撐。同時支持向量機本身具有較強的泛化能力,對新樣本具有較強的適應能力。盡管目前本文中提出的方法僅粗略地實現了3 種路面的分類,未來則可以將試驗路面種類進行擴展,從而實現更加精確的附著系數辨識分類。
5 結論
本文中提出了一種基于支持向量機的智能輪胎路面辨識算法。利用新型傳感器系統構建智能輪胎,更加直接地獲取輪胎-路面作用信息,從信號的統計特征入手,應用機器學習算法實現道路的辨識分類。利用訓練完畢的支持向量機分類器對道路切換工況進行辨識測試,結果表明所提出的算法有效可行,可在0.2 s 內對路面進行準確快速地分類判斷。較之現有的附著系數辨識算法,本文中提出的方法有如下優點:(1)具有嚴格的物理與數學原理支撐;(2)從輪胎信號著手,方法更加直接可靠;(3)無需加速、制動或轉向工況,適用范圍更廣。綜上所述,本文中提出的基于支持向量機的智能輪胎路面辨識算法具有潛在的工程價值。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
