智能指示航標的開發與應用*
2021-01-12 12:19:10劉棟
機械研究與應用 2020年6期
劉 棟
(中國船舶集團有限公司第七一〇研究所,湖北 宜昌 443003)
0 引 言
資料顯示,目前長江航道航標設置采取的主要措施是在航道相應位置系泊航標船,船上搭載不同功能航標燈用以指示航道[1]。但此種方式帶來的不便是固定系纜繩長度式航標船隨著河水水位的變化,位置會發生改變,同時存在系留纜張力增大而破斷,導致指示航標流失的危險,此時需要航道管理人員人工調整航標船系留纜長度以調整航標位置,以確保航標船處于合適位置。隨著三峽工程的陸續完工,長江航道逐步成為我國流域運輸綜合體系的重要一極,是沿江地區外向型經濟發展的重要支撐,長江航道建設進入整體加速推進的新階段。為促進長江黃金水道建設,提高航道通航效率,全面提高航標的維護保養水平,筆者開展了智能指示航標研究。
智能指示航標研究目標是設計一種可根據指示航標布放水域水位變化自動調整其系留纜長度的無人值守系統,通過指示航標錨索長度與水位對應關系研究、系統總體配置研究,完成系統總體設計以及收放絞車、控制系統、通信系統及控制軟件設計等主要組部件研制,通過江上實船試驗驗證,其基本具備隨水位變化而自動調節系留纜長度功能,可滿足智能指示航標江上無人值守使用要求。
1 系統概述
智能指示航標系統組成示意圖如圖1所示,其主要組成為太陽能供電裝置、纜長測量裝置、控制通訊單元、測深裝置、收放絞車、航標船、錨索及錨等。通過上述組成單元,智能指示航標可實現如下主要功能:①根據水位變化自動調整系留錨索長度;②可實時測量水深;③絞車收放纜長監測;④指示航標工況信息監測(包括絞車故障信息、供電故障信息、船底漏水報警等);⑤可與管理中心數據雙向傳輸;⑥擴展功能:控制系統預留標準接口,可根據需要加裝GPS定位系統、溫度傳感器、風向和風速傳感器、流速計、監控系統等。
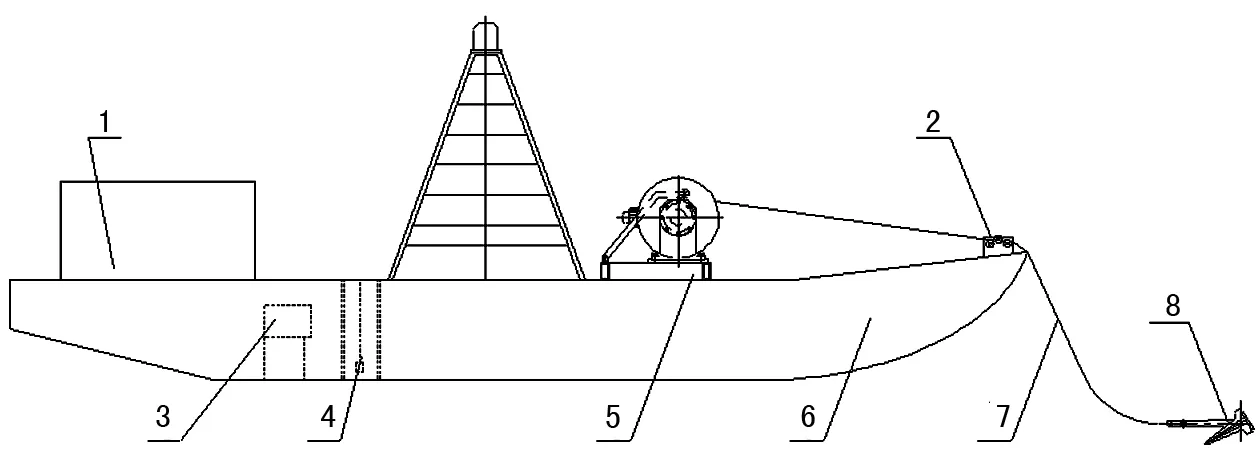
圖1 智能指示航標系統組成示意圖1.太陽能供電裝置 2.纜長測量裝置 3.控制通訊單元 4.測深裝置 5.收放絞車 6.航標船 7.錨索 8.錨
2 系統工作原理
內核船型航標一般通過船艏單點錨泊于河道[2],如圖2所示,受水流速度水深變化影響,其纜索量需要定期調整,為了保障航標安全及位置相對固定,一般設定纜索長度為水深3~7倍,水流速度越大,其取值越大,但在汛期,流速及水深變化較大,纜繩長度調整不及時會導致航標位置偏移過大或纜索受力過大而斷裂,存在航道標示不準、被撞及斷索丟失風險。本系統原理是通過監測水深、流速及纜索長度等信息,依據一定比例自適應調整,保障航標安全[3]。
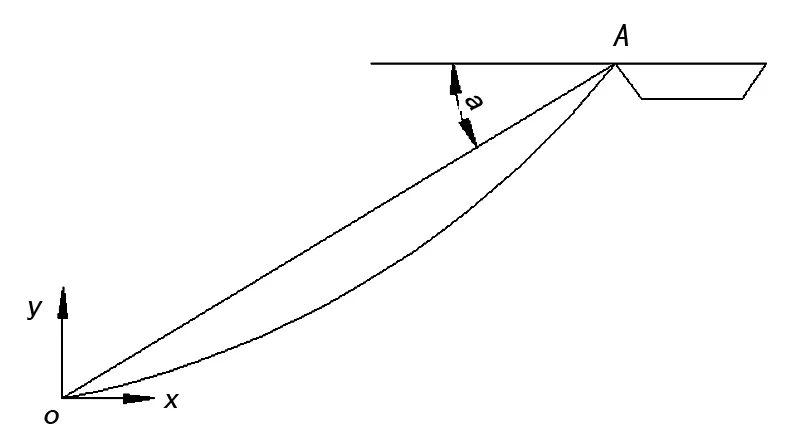
圖2 錨系模型
智能指示航標不依賴人工干預,通過系統相關參數采集,完成纜索自主調整,其相關參數調整模型如圖3所示。監測水深變化,并依據一定比例調整纜長,通過監測水流速度計算安全張力,通過監測張力是否大于安全張力來調整纜長調節量與水深變化量之間比值。

圖3 參數選擇模型
3 收放絞車設計
收放絞車的主要功能是通過對鋼絲繩的收放,實現航標船體位置的調整。航標絞車系統主要由驅動電機(含制動器)、減速機、絞盤、機架、壓緊輪,其結構簡圖如圖4所示。驅動電機選用直流力矩電機,本身配置有失電制動器,通過減速機為絞盤提供動力,實現鋼絲繩的收放作業,同時具有鎖定能力。減速機為標準三級斜齒輪減速機,輸出扭矩大。機架為整體框架式結構,作為絞盤、電機等的支撐部件,同時也是收放絞車在航標船上的安裝固定平臺。壓緊輪通過彈簧提供動力壓緊在絞盤上,保證鋼絲繩整齊排列于絞盤之上。

圖4 收放絞車
4 控制系統設計
控制系統如圖5所示,中心控制單元系統核心,一方面通過各類傳感器監測智能指示航標工作狀態,另一方面,通過測深儀實時測量當前水深數據,并依據設定好比例控制絞車收放纜繩,纜長變化量實時監測,完成智能航標纜長量隨水深變化的自主調整。為了保障系統安全性及纜長調整準確性,系統同步監測水流速度及纜繩張力,設定安全張力值,從而實時調整水深變化量與纜長收放量之間比例。系統相關參數通過4G通信模塊上傳至手機APP,實現手機端系統狀態查詢及控制。

圖5 指示航標控制系統組成框圖
5 通信系統設計
4G通訊單元作為指示航標系統與指揮中心的通訊接口,接收指揮中心的數據和命令并轉發給電機驅動及控制單元,并將電機驅動及控制單元返回的工況信息和檢測到的報警信息發給指揮中心。
通訊內容包括:指揮中心發出的控制指令、水深數據,無線通信單元發出的工況數據、收放纜繩數據、電池欠壓報警信息,控制艙漏水報警信息、絞車故障報警信息。見圖6。
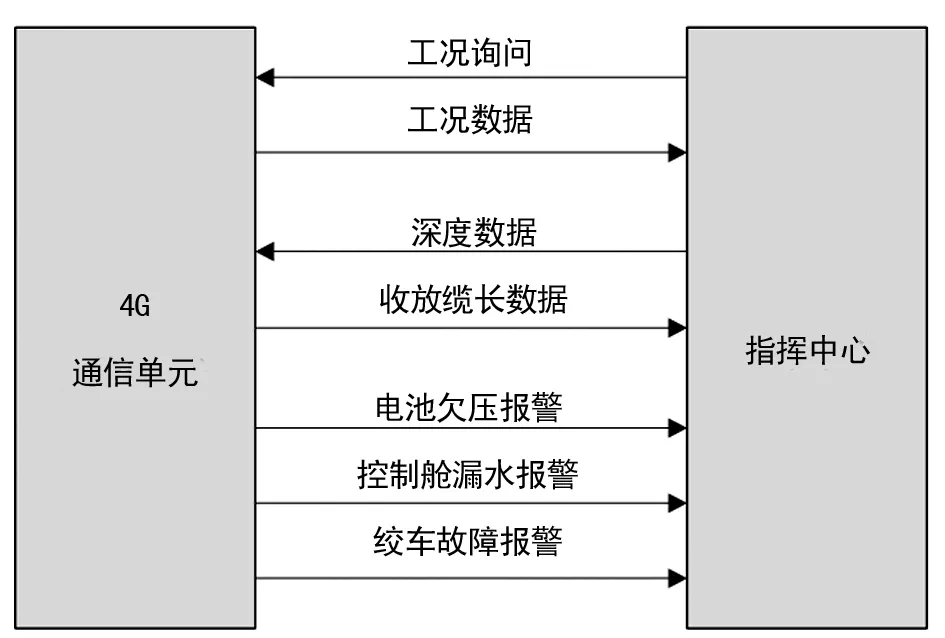
圖6 無線通信單元通信內容
6 軟件設計
指示航標軟件是航標船(浮標)系纜繩隨水位變換自動收放裝置上位機操作軟件(見圖7),具備對整個裝置控制功能、設備工作狀況顯示功能、工作日志記錄功能、水深數據記錄及歷史數據回放功能。

圖7 指示航標軟件主界面
7 現場試驗
在前期實地考察的基礎上,在岳陽航道管理處完成試驗航標船改造、設備安裝、并開展江上試驗。系統設定收放纜長與水深比值為3,纜長總長200 m,初始水深為9.3 m,初始放纜27.9 m,初始剩余纜長172.1 m,水深變化依據當前水深增減,系統于長江岳陽段水域進行了江上試驗,試驗結果表明,隨布放水域水深變化,收放絞車能自動收放系留纜,并上傳相應數據,取得了預期效果。試驗結果見表1。
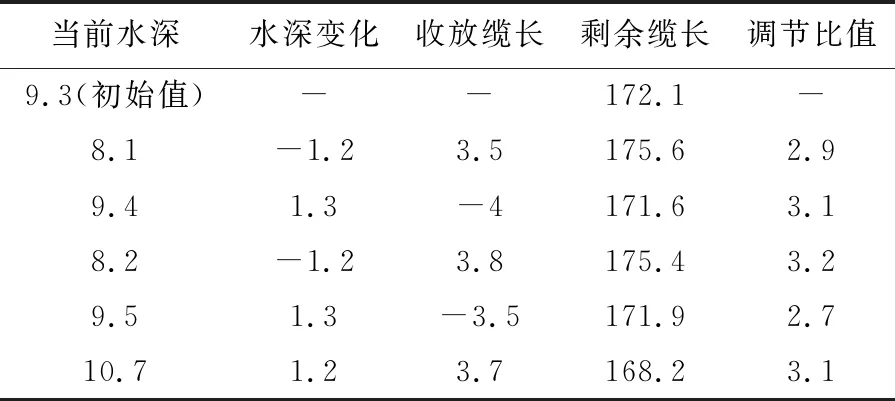
表1 水深變化與收放纜長關系 /m

圖8 試驗航標船
8 結 語
此智能指示航標通過自身水深測量裝置實時監測水深變化,智能化調節系纜繩長度;采用無線傳輸方式控制及太陽能電池供電,可實現自動化作業,無需人工干預;克服了通用浮標船系留方式的諸多缺陷,實現了航道航標生產維護的智能化,減少航標隨水位變化的損失、減輕航道維護工作量,同時良好的擴展功能為后續數字化航道建設奠定基礎,具有較好的應用全景。下一步可結合本裝置研究遙控航標、做到航標移位的無人化管理,同時可建立沿岸無盲區監控系統,全航道態勢顯控系統,真正實現內河航道的數字化管理。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
