微變形雷達無接觸遙感檢測技術在斜拉索索力測量中的應用
2021-01-11 13:04:14林賢光
湖南交通科技 2020年4期
程 斌, 林賢光
(武漢城市職業學院, 湖北 武漢 430064)
0 引言
斜拉索是斜拉橋的重要組成部分,也是斜拉橋的主要承載部件。斜拉橋在運營期間由于拉索錨固區應力高度集中、環境引起拉索腐蝕以及振動等問題會引起索力的變化,如果索力變化過大會影響到斜拉橋受力的合理性和結構的安全性,所以及時對斜拉橋的索力進行測量是關系到在役斜拉橋能否正常運營和進行健康監測的關鍵環節[1]。
拉索索力的測量是工程界的一個難題,對索力的測量是國內外橋梁領域廣泛重視的一項研究課題。目前比較常用的方法有壓力表、壓力傳感器、磁通量、振動頻率等測定法。在這些方法中,壓力表測量法簡單易行,但不適宜成橋后的測量;壓力傳感器測定法測量的索力值具有一定局限性,它只能代表索頭的張力,不能代表整索的實際索力值;磁通量測定法在國外使用較廣泛,國內應用較少,必須在拉索中安裝磁通量傳感器才能進行拉索索力測試;振動頻率測定法是常用的方法,將加速度計固定在拉索的底端位置處,通過測量拉索振動的加速度信息來獲得振動頻率信息,該方法主要問題有: ① 接觸式、單條拉索測量,效率低下; ② 測量位置在拉索底部,而不在測量最準確的拉索中間位置,所以測量值不準確; ③ 長時間加速度計測量將存在受溫漂影響而產生較大偏置現象。
1 微變形雷達工作原理
基于微波干涉的索力遙感測量技術是一種全新索力測量技術,它結合了寬帶信號脈沖壓縮、相位干涉測量,目標檢測和基頻提取等技術,能夠實現對索力的遠程遙感測量,測試數據較為穩定,受環境影響較小[2]。
微變形雷達是一種基于干涉測量技術實現斜拉橋、懸索橋和吊桿拱橋等線纜體系橋梁拉索、吊桿受力狀態檢測的設備。另外,該設備在做好抗風和保護裝置條件下,可用于測量拉索在大風、大雨條件下拉索振動位移。由于微變形雷達采用非接觸式測量,不需要在拉索上安裝任何輔助設施,檢測效率得到了極大提高,同時可以實現多達10根以上拉索索力的測量;可以在進行索力振動測試的同時得出拉索的振動位移,這對于拉索較長的拉索風、雨振的研究有一定價值。
微變形雷達主要由腳架、電腦控制單元、能量供應單元及雷達控制單元等組成,雷達控制單元安裝在配備有3D旋轉頭的三腳架上,以確保調節雷達監測方向,同時雷達單元配備有兩個用于傳輸和接收電磁波信號的喇叭天線[3]。設備與測量對象有一定距離,發射微波信號,通過反射接收后的信號計算相位,以2次發射相位差測量拉索或吊桿的振動位移[4],測試原理見圖1。

圖1 測試原理圖
圖1中d為兩次測量間目標在雷達視線上的位移量,可用式(1)計算求得。
(1)
式中:λ為雷達工作波長;φ1為第一次目標測量相位;φ2為第二次測量相位。
通過雷達波的相位差對目標物位移進行精確測量,得到斜拉索位移的時程曲線,對測試位移時程曲線進行傅里葉變換得出拉索振動頻率X(fd):

(2)
式中:T為形變觀測時間,T與頻率分辨率fd成反比,測量慢速基頻需要更長的觀測時間,這一點與常規振動傳感器要求一致。
利用微變形雷達測試的頻率可以測定索力,測試場景見圖2。雷達發出的微波呈扇形分布,在一定距離范圍,若有多個測點在扇形區域內即可同時測得多根拉索索力,多根拉索同時測試見圖3。

圖2 測試場景

圖3 多根拉索同時測試
首先從“1”位置開始測量,根據測量有效索數量,記錄編號;測量完后,將設備移動到最后1根有效索末端,進行下次測量,記錄編號,以此類推,確定每次測量對應拉索編號。
斜拉橋的每1根索通常長幾十米乃至上百米,索的一端與橋塔固結,另一端則連接橋面。盡管每根索都由多根鋼絲或鋼絞線制作,但相對于整個索的長度及它所承擔的張力,可近似看作兩端固結、而自重又可忽略不計的理想拉弦形式。根據柔韌弦振動理論,可得出相應無阻尼自由振動方程:
(3)
式中:u(x,t)為索上各點在時刻t的橫向位移;ρ為索的線密度;T為索內拉力。
由式(3)可以得到索力與頻率之間的關系:
(4)
式中:l為斜拉索的計算長度;fn為第n階固有頻率;n為為振動階次;f1為基頻,通常利用頻譜圖中相鄰兩諧振峰之間的頻率差求得基頻。
根據拉索索力測定原理,確定索力的方法與拉索約束條件等有關。對于短索來說,受邊界條件以及安裝在拉索上的阻尼器影響,短索頻率測試相對較為困難,但采取適當技術手段還是能夠準確測試拉索頻率。如采用傳統的振動測試方法往往需要進行激勵才能準確測試頻率。采用微變形雷達測試拉索可以穿透護套,直接遇鋼拉索進行反射,無需對拉索進行激勵即可準確測試拉索頻率[5]。
2 索力測量有效性判定
由于雷達技術為非接觸測量,在實際索力測量過程中,如何判斷測量數據的有效性,拉索是否漏測,可根據雷達回波“距離-幅度”圖來判斷有多少根拉索測量數據有效,距離-幅度圖見圖4。

圖4 距離-幅度圖
有效測量拉索判斷:每個波峰是一根拉索回波,當幅度超過20,或明顯比其它雜波能量更強時,可判別為有效索,圖5距離-幅度分析圖顯示了一次測量5根有效拉索。

圖5 距離-幅度分析圖
漏索判斷:如圖5中每2根有效拉索波峰之間的距離基本上等分布(大多數情況下斜拉橋靠近橋塔位置前幾根拉索間距會大點,不代表所有場合),如果S1、S2、S3、S4相差較大,根據現場拉索實際分布情況,即可判斷是否漏索。
3 微變形雷達監測系統
系統主要包括微變形雷拉索位移采集、基于WiFi/4G技術的無線數據傳輸、PC端數據處理分析幾個部分。具有較大帶寬,可實現較高距離分辨率;具有很好的環境適應性,不受光照影響,在雨、雪、霧等惡劣氣候下全天候工作。通過微波干涉技術測量拉索變形,并將所有測點初始值和變形值通過無線WiFi實時傳輸至PC端,在PC端提前設置好數據文檔格式,數據處理分析程序實時顯示各目標實測變形值及索力值。
4 工程應用
4.1 測點布設
某雙塔雙索面矮塔斜拉橋為總計有60根拉索,拉索理論長度在11~66m,最短索長11.81m,拉索分布見圖6。采用傳統振動測試法和雷達技術進行索力測試來驗證雷達索力測試的精度,尋找合適位置安放雷達,使雷達安放穩固,雷達發射波束組成的平面應盡量與待測所有斜拉索基本垂直;初步觀察雷達反射波形,斜拉索反射的雷達回波與環境反射的雷達回波波形區別明顯,雷達本身具有測距功能,可以通過距離遠近數據判斷每個雷達波形峰值依次對應由遠而近的每根斜拉索,測量斜拉索到雷達的距離來進一步確認每根斜拉索對應的信號數據[6],現場測試見圖7。
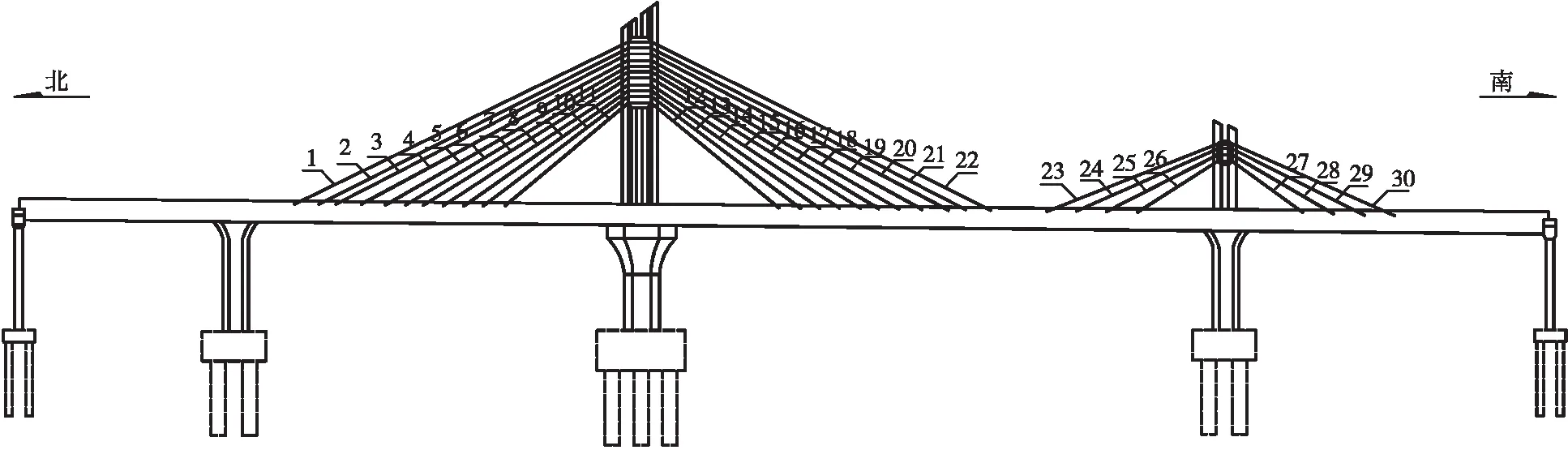
圖6 拉索分布

圖7 現場測試圖
4.2 對比分析
振動測試法(傳統云智慧設備)和雷達技術測試法頻率對比見表1。

表1 基頻對比結果表拉索編號傳統云智慧/Hz雷達/Hz兩種方法偏差/%拉索編號傳統云智慧/Hz雷達/Hz兩種方法偏差/%L12.255 852.182 2733.26R12.255 852.258 600.12L22.460 932.472 2250.46R22.460 932.456 960.16L32.597 652.571 4201.01R32.734 372.685 871.77L42.871 092.807 9602.20R42.871 092.785 073.00L53.076 173.052 1000.78R53.144 533.128 400.51L63.076 173.090 3000.46R63.007 813.059 761.73L73.349 603.342 1000.22R73.417 963.372 601.33L83.828 123.868 6001.06R83.828 123.784 601.14L94.580 074.570 6000.21R94.511 714.524 800.29L105.673 825.699 8500.46R105.537 105.684 602.66L116.562 506.562 1000.01R116.562 506.554 400.12L126.835 936.653 6002.67R126.630 856.607 900.35L135.947 265.928 8000.31R135.742 185.821 901.39L144.648 434.601 1001.02R144.648 434.593 501.18L153.828 123.807 500 0.54R153.828 123.792 270.94L163.417 963.342 0802.22R163.466 793.471 800.14L173.076 173.059 8000.53R172.929 682.983 461.84L183.076 173.052 0000.79R183.222 653.136 062.69L192.832 032.869 0001.31R192.734 372.724 030.38L202.587 892.586 6800.05R202.685 542.678 240.27L212.441 402.411 1831.24R212.441 402.441 700.01L222.246 092.266 2000.90R222.294 922.266 211.25L234.882 814.852 9000.61R234.785 154.746 100.82L245.664 065.730 4001.17R245.566 405.600 700.62L257.031 257.004 6000.38R256.933 596.920 700.19L269.375 009.537 9001.74R269.375 009.309 000.70L278.984 379.141 1001.74R278.984 379.110 601.40L286.542 966.577 3000.52R286.738 286.615 501.82L295.517 575.524 4000.12R295.468 755.509 100.74L304.882 814.860 5000.46R304.882 814.860 500.46
2種測量結果對比統計:
①偏差<1%為35根,占比58.34%;②偏差≥1%且<2%為18根,占比30%;③偏差≥2%且<3%為5根,占比8.33%;④偏差≥3%且<4%為2根,占比3.33%。
2種方法最大偏差為3.26%,2%以下的總計有53根拉索,占比接近90%,表明2種測試方法結果準確,一致性較好。所以,使用微波索力檢測儀測量拉索受力數據可信。
5 結語
研究了微變形雷達系統基本原理和索力測定方法,通過對具體斜拉橋索力進行對比性檢測,探究了微波雷達檢測性能及適用性,主要得到如下結論:
1) 微變形雷達檢測技術具有亞毫米級的位移精度,可應用于斜拉橋索力檢測,數據精確可信,具有單臺設備可同時動態測量多個目標等優點。
2) 微變形雷達可實現遠距離、無接觸直接獲得實時位移數據,并且能夠有效消除檢測現場外界因素干擾,可實現全天候測量,不受光線、大霧、灰塵、大雨等環境影響。具有傳統檢測設備不具備的優勢,有較強的實用推廣價值。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
中華詩詞(2020年1期)2020-09-21 09:24:52
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
