滾仰式半捷聯光電穩定平臺誤差分析與補償
2021-01-06 12:48:25趙毅鑫崔顥陳曉曾丁海山
航空兵器 2021年6期
趙毅鑫 崔顥 陳曉曾 丁海山
摘 要:為了提高滾仰式半捷聯光電穩定平臺的視線指向測量精度, 提出一種穩定平臺誤差建模與參數標定的方法。 針對滾仰式導引頭的結構特點, 分析了穩定平臺的主要誤差來源, 利用坐標變換法和泰勒公式建立了失調角的線性誤差模型, 設計了通過補償失調角誤差提高穩定平臺的視線指向測量精度方法。 針對穩定平臺誤差參數標定問題, 利用最小二乘法設計了誤差參數標定方法。 仿真結果表明: 誤差參數標定方法可以有效標定誤差參數, 通過失調角線性誤差模型補償失調角誤差的方法可以顯著提高穩定平臺視線指向測量精度。
關鍵詞:???? 穩定平臺; 裝調誤差; 參數標定;? 補償; 滾仰式導引頭; 最小二乘法; 制導與控制
中圖分類號:???? TJ765.3+31; V248.1文獻標識碼:??? A文章編號:???? 1673-5048(2021)06-0053-05
0 引? 言
在現代戰爭中, 奪取制空權成為決定勝負的關鍵因素[1]。 紅外制導空空導彈是空中對抗的主戰武器之一, 小型化是其未來的發展需求[2-3]。 紅外導引系統是紅外制導空空導彈的重要子系統, 一般由跟蹤穩定平臺系統、 紅外探測系統、 目標信號處理系統和導引信號形成系統組成, 其主要功能是目標尋的和穩定跟蹤。 滾仰式半捷聯光電穩定平臺相較于傳統穩定平臺具有體積小、 探測范圍大的優點, 是新一代空空導彈導引頭平臺結構的發展方向[4-5]。 失調角是導引頭探測器直接測得的彈目視線相對于探測器的方位角和高低角, 其準確性影響著視線在彈體系下的準確指向[6-7]。 由于機械系統誤差和測量系統誤差的存在, 使得導引頭探測器測得的失調角與理想情況下的失調角存在偏差。 對探測器所得失調角數據進行補償后, 可以顯著提高導引頭視線測量精度。
為了對失調角進行補償, 需要建立失調角的誤差模型, 并對其中的誤差項進行標定。 誤差模型建立前, 需要建立包含誤差項的平臺機構運動學模型。 主要有以下建模方法: 四元數法、 局部指數積法、 球諧函數法、 基本參數法和坐標變換法[8-12]。 其中, 坐標變換法具有模型完整、 精確度高等特點, 被廣泛應用[13-15]。 本文全面分析了影響穩定平臺視線測量誤差的來源, 建立了失調角的線性誤差模型, 并設計了穩定平臺誤差參數標定方法。 最后通過數值仿真驗證了線性誤差模型和參數標定方法的正確性和有效性。
1 誤差模型
滾仰式半捷聯穩定平臺的機械結構為滾轉-俯仰兩軸結構, 其中, 滾轉框架作為外框架, 俯仰框架作為內框架, 探測器剛性固連在俯仰框架上, 理想情況下彈體縱軸與滾轉框架轉軸重合, 滾轉框架轉軸與俯仰框架轉軸正交, 俯仰框架處于零位時, 探測器光軸和滾轉框架轉軸重合。
1.1 坐標系定義
為了分析滾仰式半捷聯穩定平臺的運動學關系, 基于右手直角坐標定義了如下坐標系。 為了簡化, 分析時將各個坐標系進行平移, 使得各個坐標系的原點重合。
(1) 彈體坐標系(b系)O-XbYbZb: 原點O在導彈質心上; OXb軸和彈體的縱軸重合, 方向指向導彈頭部; OYb軸在彈體的縱對稱面內, 向上為正。
(2) 外環坐標系(o系)O-XoYoZo: 原點O在滾轉軸和俯仰軸交點上;? OXo軸和外框架轉軸固連,? 方向指向導彈頭部; OZo軸和內框架轉軸重合, 方向向外。
(3) 平臺坐標系(p系)O-XpYpZp: 原點O在滾轉軸和俯仰軸交點上; OZp軸和內框架轉軸固連, 電機指向旋變的方向為正方向; 當內框架處于零位時, OXp軸在內框架轉軸和外框架轉軸確定的平面內, 方向指向導彈頭部。
(4) 探測坐標系(d系)O-XdYdZd: 原點O在探測器平面中心上; OXd軸和探測器平面的中垂線重合并指向前方; OYd軸和探測器面上敏感元的行平行, 方向指向外。
理想情況下, 探測坐標系(d系)與平臺坐標系(p系)重合, 彈體坐標系(b系)繞OXb軸旋轉γs角與外環坐標系(o系)重合, 外環坐標系(o系)繞OZo軸旋轉θs角與平臺坐標系(p系)重合。
1.2 誤差的描述
穩定平臺在實際裝配過程中, 存在一些裝配調校誤差, 使得穩定平臺指向精度降低。 在不考慮外框架轉軸和內框架轉軸異面的情況下, 本文將裝調誤差分為四類: 外框架安裝誤差、 內框架安裝誤差、 探測器安裝誤差、 零位誤差。? 誤差角度的正負由右手法則確定。
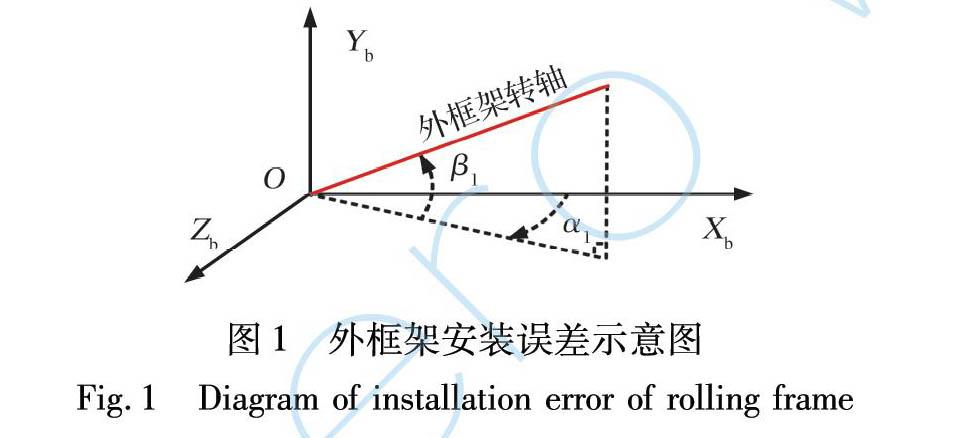
1.2.1 外框架安裝誤差
在理想狀態下, 外框架轉軸和彈體縱軸重合。 外框架安裝誤差可由圖1中的Δ1=(α1, β1)表示。 其中, α1為OXb軸與外框架轉軸在XbOZb平面上投影的夾角; β1為外框架轉軸與XbOZb平面的夾角。
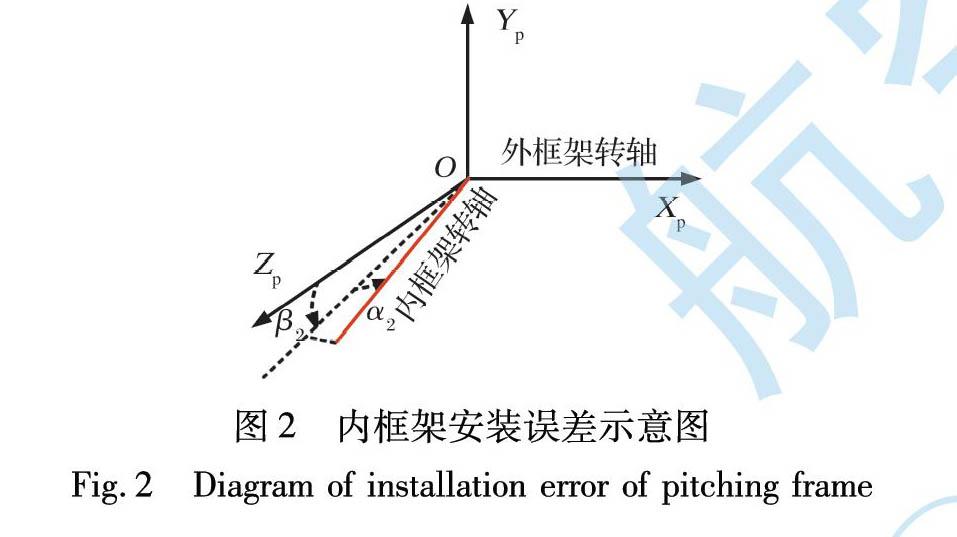
1.2.2 內框架安裝誤差
在理想狀態下, 內框架轉軸和彈體縱軸重合。 內框架安裝誤差可由圖2中的Δ2=(α2, β2)表示。 其中, α2為內框架轉軸與YpOZp平面的夾角, β2為OZp軸與內框架轉軸在YpOZp平面上投影的夾角。
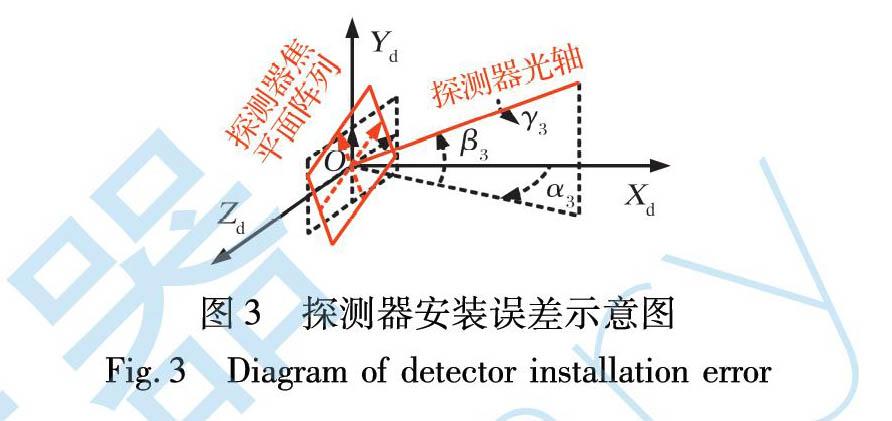
1.2.3 探測器安裝誤差
在理想狀態下, 探測器平面中垂線和OXp軸重合。 探測器安裝誤差可由圖3中的Δ3=(α3, β3, γ3)表示。 顯然, 探測系先繞OXd軸轉-γ3角, 然后繞OZd軸轉-β3角, 最后繞OYd軸轉-α3角就和平臺坐標系重合。
1.2.4 零位誤差
零位誤差是由于傳感器的零位與設計的框架機械零位不重合導致的, 可分為外框架零位誤差δγ和內框架零位誤差δθ。
1.3 誤差傳遞建模
由1.2節分析可知, 各坐標系變換之間的誤差傳遞如圖4所示。
定義Tx(), Ty(), Tz()分別為坐標系繞相應坐標軸旋轉角的坐標變換矩陣。 設彈目視線上的單位矢量r在b系下的投影為Rb。
當不存在裝調誤差時, 記r在d系下的投影為Rd, 可以得到以下結果:
Rb=Tx(γs)Tz(θs)Rd(1)
當存在裝調誤差時, 記r在d系下的投影為R′d。 根據圖4中坐標系轉換關系, 可得以下結果:
Rb=T1R′d(2)
式中:
T1=Ty(α1)Tz(β1)Tx(γs+γ0)Tx(β2)Ty(α2)·
Tz(θs+θ0)Ty(α3)Tz(β3)Tx(γ3)。
由式(1)~(2)聯立得到R′d與Rd之間的關系:
Rd=Tz(-θs)Tx(-γs)T1R′d(3)
記理想情況下, 彈目視線在d系下的失調角為(εy, εz)。 其中, εy為方位角, εz為高低角。 則有
Rd=Ty(εy)Tz(εz)100=cosεycosεzsinεz-sinεycosεz(4)
記有誤差的真實情況下, b系下的視線矢量R′d對應的失調角為(ε′y, ε′z), 可得
R′d=cosε′ycosε′zsinε′z-sinε′ycosε′z(5)
將式(4)~(5)代入式(3), 可得理想情況下的失調角與有誤差情況下的失調角之間的對應關系:
cosεycosεzsinεz-sinεycosεz=Tz(-θs)Tx(-γs)T1cosε′ycosε′zsinε′z-sinε′ycosε′z(6)
1.4 線性誤差模型建立
因為誤差量和失調角均為小量, 故可以運用泰勒公式將式(6)中包含誤差量和失調角的三角函數項展開, 并舍棄高階小量, 即sinΔ=Δ, cosΔ=1, 可得失調角的線性誤差方程為
Δεy=εy-ε′y=bycy
Δεz=εz-ε′z=bzcz (7)
式中:
by=[1 , cosθs , -sinθs, sinγscosθs, cosγscosθs]
bz=[1, cosγs, -sinγs]
cy=[δ2, δ3, δ4, δ5, δ6]T
cz=[δ1, δ5, δ6]T。
其中, cy, cz中各項常量參數與前文分析的誤差項之間的對應關系: δ1=β3+δθ, δ2=α3, δ3=α2, δ4=β2+δγ, δ5=β1,?? δ6=α1。
式(7)中的失調角線性誤差主要包含誤差項和框架角項。 模型表明: 失調角的誤差主要與誤差項和框架角有關。
2 標定方法
誤差參數標定的目標是基于探測器直接測得的失調角數據標定誤差參數的最優值。 一般采用最小二乘法標定其參數。 式(7)每項均為一階模型, 將其抽象為
f=b1×ncn×1(8)
式中: f為所求問題值; cn×1=[c1, c2, …, cn]T為待定的誤差參數; b1×n=[b1, b2, …, bn]為已知變量的函數。 誤差參數的辨識過程需要比較失調角的實測值和標定值, 為了更精確地辨識誤差參數, 應增加實測工作點。 由仿真試驗測得m(m≥n)組數據, 將測量數據按以下向量或矩陣形式表示:
fm×1=[f 1, f 2, …, f m]
Bm×n=[(b11×n)T, (b21×n)T, …, (bm1×n)T]T
假設BTm×n, Bm×n是非奇異的, 運用最小二乘法可得最優參數為
cn×1=(BTm×nBm×n)-1BTm×n fm×1(9)
對式(7)各項分別運用最小二乘法, 即可計算出誤差參數標定值:
δ=[δ1, δ2, …, δ6]T
3 數值仿真
為了驗證以上模型的正確性和有效性, 設計了以下數值仿真試驗。 首先, 隨機設計一組誤差參數, 將其作為式(2)的參數構建導引頭穩定平臺模型, 然后由標定方法獲得誤差參數標定值。 將誤差參數標定值代入式(7)中, 獲得失調角的線性誤差模型。 最后, 在不同框架角條件下, 測試失調角線性誤差模型的補償效果。
3.1 仿真模型建立
設外框架安裝誤差為Δ1=(-0.205°, 0.295°); 內框架安裝誤差為Δ2=(-0.23°, 0.3°); 探測器裝調誤差為Δ3=(-0.25°, 0.12°, -0.5°); 內、 外框架零位誤差分別取為θ0=0.21°, γ0=0.15°。 將以上參數代入式(2)中, 即可構建導引頭穩定平臺模型。
3.2 誤差參數標定仿真
本文通過測量彈體系中單位矢量的失調角, 估算平臺誤差。 令γs在{-135°, -45°, 45°, 135°}中分別取值, θs在{-45°, 0, 45°}中分別取值, 共形成12組框架角。 設置視線與探測器光軸重合, 即令ε′y=ε′z=0。 將每一組框架角代入構建的導引頭穩定平臺模型中, 可得真實的彈體系下的視線矢量Rb。 將Rb代入式(1)中, 可得理想情況下的失調角數據, 進而得到該組框架角條件下的失調角誤差數據。 將這12組數據代入式(9)中, 即可計算出一組誤差參數標定值。 計算結果如下(保留3位有效數字):
δ=[0.327°, -0.250°, -0.233°, 0.448°, 0.295°, -0.205°]
將這組數據代入式(7)中, 構建出失調角的線性誤差模型。
3.3 視線指向補償仿真
由式(7)可知, 失調角誤差主要與框架角有關, 失調角本身對于失調角誤差的影響很小, 可以忽略, 且在大部分的工作過程中, 導引頭光軸可以跟蹤上視線。 故在仿真中, 將有誤差的真實情況下的失調角項固定, 令視線與探測器光軸重合, 即令ε′y=ε′z=0。 然后, 在不同的框架角條件下, 利用構建的導引頭穩定平臺模型, 計算出視線上單位向量在彈體系下的真實投影Rb, 即視線的真實指向。 利用式(1)產生導引頭實際輸出的有誤差的彈體系下的視線矢量R′b, 再利用3.2節中構建的失調角的線性誤差模型, 計算此框架角條件下的失調角誤差(Δεy, Δεz)。 記補償過后的失調角為ε″y=ε′y+Δεy, ε″z=ε′z+Δεz, 將其代入式(1)中, 產生導引頭實際輸出補償后的彈體系下的視線矢量R″b。 記Rb與R′b的夾角為δφ1, Rb與R″b的夾角為δφ2。 δφ1和δφ2分別為補償前后的視線指向測量誤差。
對彈體前半球進行網格數據仿真, 外框架為固定值, 內框架從-60°開始以5°步長運動到60°。 然后, 外框架從-180°開始以5°步長運動到180°重復仿真試驗, 形成一個空間網格測試區域。 圖5(a)給出了補償前視線指向測量誤差δφ1隨框架角的變化圖像, 圖5(b)給出了補償后視線指向測量誤差δφ2的變化圖像。
仿真結果表明: 視線的指向誤差主要與空間指向位置有關, 隨框架角的變化而變化。 在仿真算例的整個空間網格測試區域內, 失調角線性誤差模型均可有效補償視線的指向誤差。 計算可得, 補償前的視線指向測量誤差最大為1.083°, 均值為0.629°, 標準差為0.278°; 補償后的指向誤差最大為0.006°, 均值為0.001°, 標準差為0.000 1°。 補償后視線指向測量誤差的幅值、 均值和標準差均顯著減小, 穩定平臺的視線指向測量精度顯著提高。
4 結? 論
本文研究了滾仰式半捷聯光電穩定平臺誤差分析與補償問題。 建立了失調角的線性誤差模型, 利用最小二乘法收斂速度快與誤差小的特點, 設計了穩定平臺誤差參數標定方法。 數值仿真實驗結果證明: 視線的指向誤差與空間指向位置有關, 隨框架角的變化而變化; 穩定平臺誤差參數標定方法可以快速精確地辨識出穩定平臺中的誤差參數; 失調角線性誤差模型補償方法可以顯著提高滾仰式半捷聯光電穩定平臺的視線指向測量精度。 本文的研究結果顯著提高了穩定平臺的視線指向測量精度,但文中主要針對穩定平臺線性誤差部分進行了標定與補償分析, 后續需要研究模型簡化、 環境和測量數據干擾等非線性因素的影響及其標定與補償。
參考文獻:
[1] 樊會濤, 閆俊. 自主化——機載導彈重要的發展方向[J]. 航空兵器, 2019, 26(1): 1-10.
Fan Huitao, Yan Jun. The Important Development Direction of Airborne Missile: Autonomization[J]. Aero Weaponry, 2019, 26(1): 1-10. (in Chinese)
[2] 樊會濤, 崔顥, 天光. 空空導彈70年發展綜述[J]. 航空兵器, 2016(1): 3-12.
Fan Huitao, Cui Hao, Tian Guang. A Review on the 70-Year Development of Air-to-Air Missiles[J]. Aero Weaponry, 2016(1): 3-12. (in Chinese)
[3] 樊會濤, 張蓬蓬. 空空導彈面臨的挑戰[J]. 航空兵器, 2017(2): 3-7.
Fan Huitao, Zhang Pengpeng. The Challenges for Air-to-Air Missile[J]. Aero Weaponry, 2017(2): 3-7. (in Chinese)
[4] Rudin R T. Strapdown Stabilization for Imaging Seekers[C]∥2nd Annual AIAA SDIO Interceptor Technology Conference, 1993.
[5] 劉珂, 陳寶國, 李麗娟. 空空導彈紅外導引頭技術發展趨勢及關鍵技術[J].? 激光與紅外, 2011, 41(10): 1117-1121.
Liu Ke, Chen Baoguo, Li Lijuan. Development Tendency and Key Technology of IR Seeker for Air-to-Air Missile [J]. Laser & Infrared, 2011, 41(10): 1117-1121. (in Chinese)
[6] 呂常波, 丁海山, 花文濤, 等. 裝調誤差對滾仰式導引頭視軸指向的影響分析[J]. 彈箭與制導學報, 2014,? 34(5): 4-6.
Lü Changbo, Ding Haishan, Hua Wentao, et al. Analysison Influence of Installation Errors on Direction of Axis of Sight of Roll-Pitch Seeker[J].Journal of Projectiles,? Rockets, Missiles and Guidance, 2014, 34(5): 4-6. (in Chinese)
[7] 趙明, 白楊, 劉慧. 導引頭穩定平臺指向誤差建模與參數標定[J]. 紅外與激光工程, 2013, 42(S2): 374-379.
Zhao Ming, Bai Yang, Liu Hui. Pointing Error Modeling and Parameter Calibration for Seeker Stabilized Platform [J]. Infrared and Laser Engineering, 2013, 42(S2): 374-379. (in Chinese)
[8] 王濤, 朱明超, 訚勝利, 等. 穩定平臺軸系精度對視軸指向誤差的影響分析[J]. 紅外與激光工程, 2011, 40(11): 2265-2269.
Wang Tao, Zhu Mingchao, Yin Shengli, et al. Analysis of LOS Pointing Error Derived from Precision of Shafting in Stabilization Mechanism[J]. Infrared and Laser Engineering, 2011, 40(11): 2265-2269.(in Chinese)
[9] 王軍平, 尚超, 吳軍彪.? 四元數法在光滑環系統坐標變換中的應用研究[J]. 航空兵器, 2011(3): 24-27.
Wang Junping,? Shang Chao,? Wu Junbiao.? Application of Quaternion Method in Coordinate Conversion of Slick Chain System[J]. Aero Weaponry, 2011(3): 24-27. (in Chinese)
[10] 張良, 韓宇萌.? 滾仰式半捷聯穩定平臺的神經網絡自適應控制算法[J]. 測控技術, 2018, 37(6): 5-8.
Zhang Liang, Han Yumeng.? A Neural Network Adaptive Control Algorithm for Roll-Pitch Semi-Strapdown Stabilized Platform [J]. Measurement & Control Technology, 2018, 37(6): 5-8. (in Chinese)
[11] Okamura K, Park F C.? Kinematic Calibration Using the Product of Exponential Formula [J]. Robotica, 1996, 14(4): 415-421.
[12] 劉新新. 巡飛彈滾仰式導引頭建模與末制導技術研究[D]. 南京:? 南京理工大學, 2019: 7-20.
Liu Xinxin. Modeling and Terminal Guidance Technology of Roll-Pitch Seeker for Loitering Missile Systems [D]. Nanjing: Nanjing University of Science & Technology,? 2019: 7-20. (in Chinese)
[13] 花文濤, 劉凱, 丁海山. 滾仰式紅外導引頭視線角速率提取方法研究[J]. 紅外技術, 2015, 37(1): 63-66.
Hua Wentao, Liu Kai, Ding Haishan.? Research on Roll-Pitch Infrared Seeker LOS Rate Extraction[J]. Infrared Technology, 2015, 37(1): 63-66. (in Chinese)
[14] 曾龍.? 滾擺式導引頭伺服穩定平臺設計與研究[D].? 北京: 北京理工大學, 2016: 48-56.
Zeng Long. The Research and Design on Stabilized Platform of Roll-Pitch’s Seeker[D]. Beijing: Beijing Institute of Technology, 2016: 48-56.? (in Chinese)
[15] 申帥, 張葆, 李賢濤, 等.? 航空光電穩定平臺質量不平衡力矩的前饋補償[J]. 光學精密工程, 2017, 25(5): 1281-1290.
Shen Shuai,? Zhang Bao,? Li Xiantao,? et al. Feedforward Compensation of Mass Unbalance Moment for Airborne Photoelectric Stabilized Platform [J]. Optics and Precision Engineering, 2017, 25(5): 1281-1290. (in Chinese)
Error Analysis and Compensation of Roll-Pitch
Semi-Strapdown Photo-Electricity Stabilized Platform
Zhao Yixin*, Cui Hao, Chen Xiaozeng, Ding Haishan
(China Airborne Missile Academy, Luoyang 471009, China)
Abstract:? In order to improve the pointing accuracy of roll-pitch semi-strapdown photo-electricity stabilized platform, a method for error modeling and parameter calibration of stabilized platform is proposed. Based on the mechanical structure characteristics of the roll-pitch seeker, the main error sources of the stabilized platform are analyzed. Established the linear error model of the misalignment angle by using the coordinate transformation method and Taylor formula, and designed a method to improve the line-of-sight measurement accuracy of the stable platform by compensating the misalignment angle error. The least square method is used to design the calibration method of error parameters. The simulation results show that the error parameter calibration method can effectively calibrate the error parameters, and the method of compensating the misalignment angle error through the misalignment angle linear error model can significantly improve the line of sight pointing measurement accuracy of the stabilized platform.
Key words:? stabilized platform; installation error; parameter calibration and compensation; roll-pitch seeker; least square method