基于彈道超實時仿真的多彈協同制導研究
2021-01-06 12:48:25張鵬魯浩沈欣
航空兵器 2021年6期
張鵬 魯浩 沈欣

摘 要:在導彈速度不可控的情況下進行多彈時間協同制導具有很大難度。 彈道實時仿真方法能準確估計剩余飛行時間, 并預測彈道信息。 基于此, 本文建立了水平面控制過載與各導彈飛行時間誤差之間的閉環控制, 進而使所有導彈的飛行時間趨于一致, 實現攻擊時間協同, 另外設計了具有攻擊角度約束的彈道成型制導律。 對設計的制導律進行六自由度仿真驗證, 結果表明, 以彈道超實時仿真為基礎設計的多彈協同制導律能夠保證多枚導彈同時以期望的攻擊角度命中目標。
關鍵詞:???? 協同制導律; 攻擊時間約束; 攻擊角度約束; 超實時仿真; 剩余飛行時間; 多彈協同
中圖分類號:???? TJ765; V448? 文獻標識碼:??? A? 文章編號:???? 1673-5048(2021)06-0034-06
0 引? 言
1997年, 美國提出了“網絡中心戰”作戰體系, 經過不斷的完善, 正在朝著“分布式作戰”、 “決策中心戰”等新的方向轉變。 可以預見, 未來戰爭將是體系與體系的對抗, 戰爭形態也必將呈現信息化、 電子化、 網絡化、 智能化等顯著特點[1]。 新技術和新裝備的出現大幅提高了目標的作戰性能, 新環境和新干擾也使空戰環境的變得更為復雜。 在這種情況下, 單枚導彈能夠發揮的作用和實現的功能十分有限, 多導彈間的協同作戰將變得越來越重要。
多彈協同是一個復雜的系統, 其中協同制導是協同攻擊中的核心技術, 在協同作戰中起關鍵作用[2]。 近年來, 國內外大量學者對協同制導開展了深入研究。 這些研究成果主要集中在多枚導彈攻擊單個目標時, 將脫靶量、 攻擊時間和攻擊角度作為約束條件, 基于時空一致性原則來實現多導彈之間的協同[3]。 多彈對多目標的情況可以在多對一的基礎上, 輔以航跡規劃和任務分配實現。 郭正玉等[4-5]基于快速非奇異終端滑模理論設計了帶有角度約束、 攻擊大機動目標的三維空間多彈協同制導律, 但其未考慮俯仰平面和偏航平面之間的耦合, 且仿真時導彈速度恒定不變。 宋俊紅等[6-9]將協同制導律的設計過程分成視線法向和視線方向兩部分, 基于有限時間一致性理論和滑模控制理論設計了多彈協同制導律, 但公式復雜且需要的信息較多。 文獻[10-12]基于領彈-從彈思路設計了多彈分布式協同制導控制方法, 但前提是假設導彈速度完全可控。 文獻[13]提出了一種新型的基于領從式策略的三維時間協同制導律, 將對攻擊時間的控制問題轉化為從彈跟蹤領彈的剩余彈目相對距離問題, 但假定導彈速度恒定, 攻擊對象為靜止目標。
目前, 研究較多的協同制導方法是以非奇異終端滑模理論為基礎的有限時間收斂制導律, 其是從控制系統的穩定性出發推導出的非常復雜的控制律, 需要設計的參數較多, 不利于工程實現。 其次, 目前的研究大多在二維平面或者是認為俯仰平面和偏航平面沒有耦合的偽三維空間, 在真三維空間的協同制導研究的不多, 且建立的模型過于理想, 或假設導彈速度完全可控, 或假設導彈速度為固定常值, 這對于使用固體火箭發動機的空空導彈來說都是不適用的。
針對上述問題, 本文提出了空空導彈彈道超實時仿真方法, 并設計了彈道成型角度約束制導律, 在六自由度環境中進行仿真分析, 驗證了所提方法的有效性、 合理性和工程實用性。
1 彈道超實時仿真方法
超實時仿真是指系統仿真模型的時間過程快于實際系統的仿真研究, 運行一次仿真用時極少, 這一技術大多應用在航天器故障診斷、 預測控制、 輔助決策等領域[14]。 本文借鑒超實時仿真的思想, 通過建立導彈、 目標的簡化運動模型, 利用最優制導律閉合制導回路, 構建系統的超實時仿真模型。 該模型能以導彈當前的攻擊態勢作為輸入信息, 按一定的周期在較短時間內快速解算剩余的飛行彈道。 在導彈飛行過程中, 可以根據超實時仿真結果得到未來的彈道信息, 為在線預測、 評估導彈的制導控制效果提供了可能, 也為在線進行彈道規劃、 參數優化和制導控制策略的及時調整奠定了基礎。
本文利用彈道超實時仿真方法, 快速、 超前預測彈道信息的特點, 準確估計每個導彈對應的剩余飛行時間, 綜合所有導彈的超實時仿真結果, 在線調整每個導彈的控制過載, 形成閉環控制, 最終滿足多彈攻擊時間和攻擊角度的雙重約束。 彈道超實時仿真過程如圖1所示。
從圖1可知, 超實時仿真嵌套在正常彈道仿真程序之中, 相當于在正常彈道仿真程序中存在一個運行速度極快的數字仿真模型, 按照設定的周期循環調用超實時仿真模型。 超實時仿真可以在導彈飛行過程中根據當前的攻擊態勢快速進行彈道仿真, 從而在導彈未真正遇靶前, 提前得到飛行彈道未來的許多信息。
2 超實時仿真模型
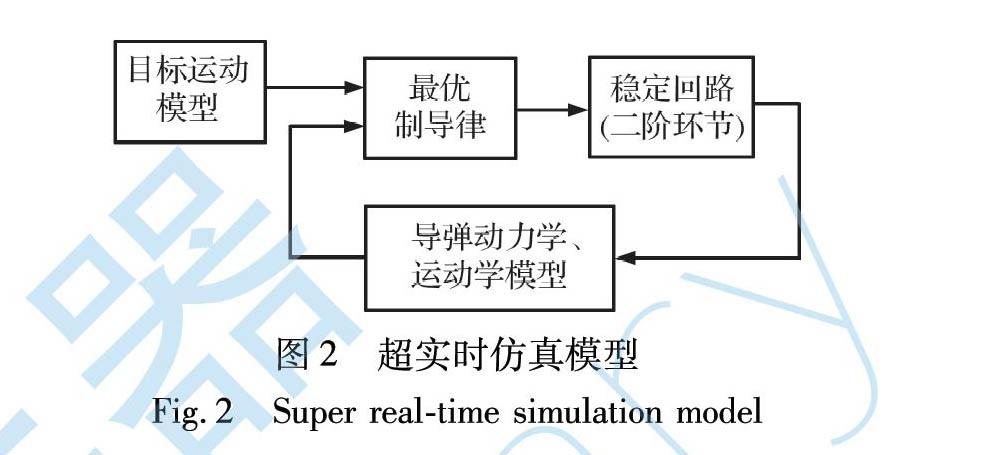
本文建立的超實時仿真模型框圖如圖2所示, 主要由目標運動模型、 導彈運動學/動力學模型、 最優制導律及穩定回路組成, 不考慮導引頭和舵機等環節。
為了保證運算速度, 需對超實時仿真模型進行合理的簡化。 為了保證后續進行彈道規劃、 參數優化和制導控制策略調整的有效性, 超實時仿真模型的仿真結果與六自由度模型的仿真結果需要具有較高的擬真度, 在典型條件下本文建立的超實時仿真模型與六自由度模型的擬真度仍達到90%以上。
2.1 目標運動模型
假設目標在剩余飛行時間內以當前速度作勻速運動, 其運動模型為
vc=vc0(1)
rc=rc0+vc·h(2)
式中: vc, rc分別為目標的速度和位置矢量; vc0, rc0分別為目標在當前態勢下的初始速度和位置矢量; h為積分步長。
2.2 導彈運動模型
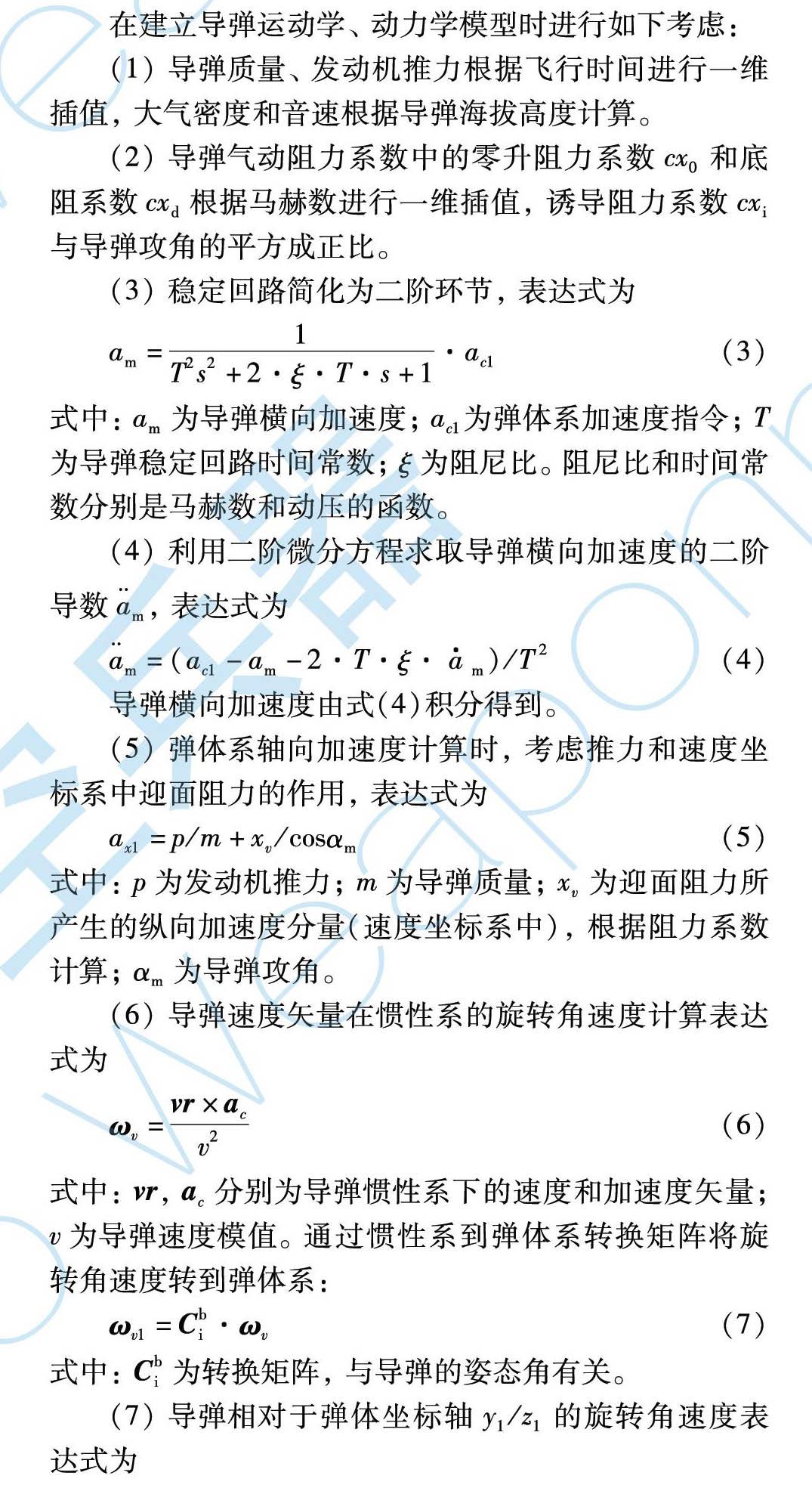
在建立導彈運動學、 動力學模型時進行如下考慮:
(1) 導彈質量、 發動機推力根據飛行時間進行一維插值, 大氣密度和音速根據導彈海拔高度計算。
(2) 導彈氣動阻力系數中的零升阻力系數cx0和底阻系數cxd根據馬赫數進行一維插值, 誘導阻力系數cxi與導彈攻角的平方成正比。
(3) 穩定回路簡化為二階環節, 表達式為
am=1T2s2+2·ξ·T·s+1·ac1(3)
式中: am為導彈橫向加速度; ac1為彈體系加速度指令; T為導彈穩定回路時間常數; ξ為阻尼比。 阻尼比和時間常數分別是馬赫數和動壓的函數。
(4) 利用二階微分方程求取導彈橫向加速度的二階導數a¨m, 表達式為
a¨m=(ac1-am-2·T·ξ·a·m)/T2(4)
導彈橫向加速度由式(4)積分得到。
(5) 彈體系軸向加速度計算時, 考慮推力和速度坐標系中迎面阻力的作用, 表達式為
ax1=p/m+xv/cosαm(5)
式中: p為發動機推力; m為導彈質量; xv為迎面阻力所產生的縱向加速度分量(速度坐標系中), 根據阻力系數計算; αm為導彈攻角。
(6) 導彈速度矢量在慣性系的旋轉角速度計算表達式為
ωv=vr×acv2 (6)
式中: vr, ac分別為導彈慣性系下的速度和加速度矢量; v為導彈速度模值。 通過慣性系到彈體系轉換矩陣將旋轉角速度轉到彈體系:
ωv1=Cbi·ωv(7)
式中: Cbi為轉換矩陣, 與導彈的姿態角有關。
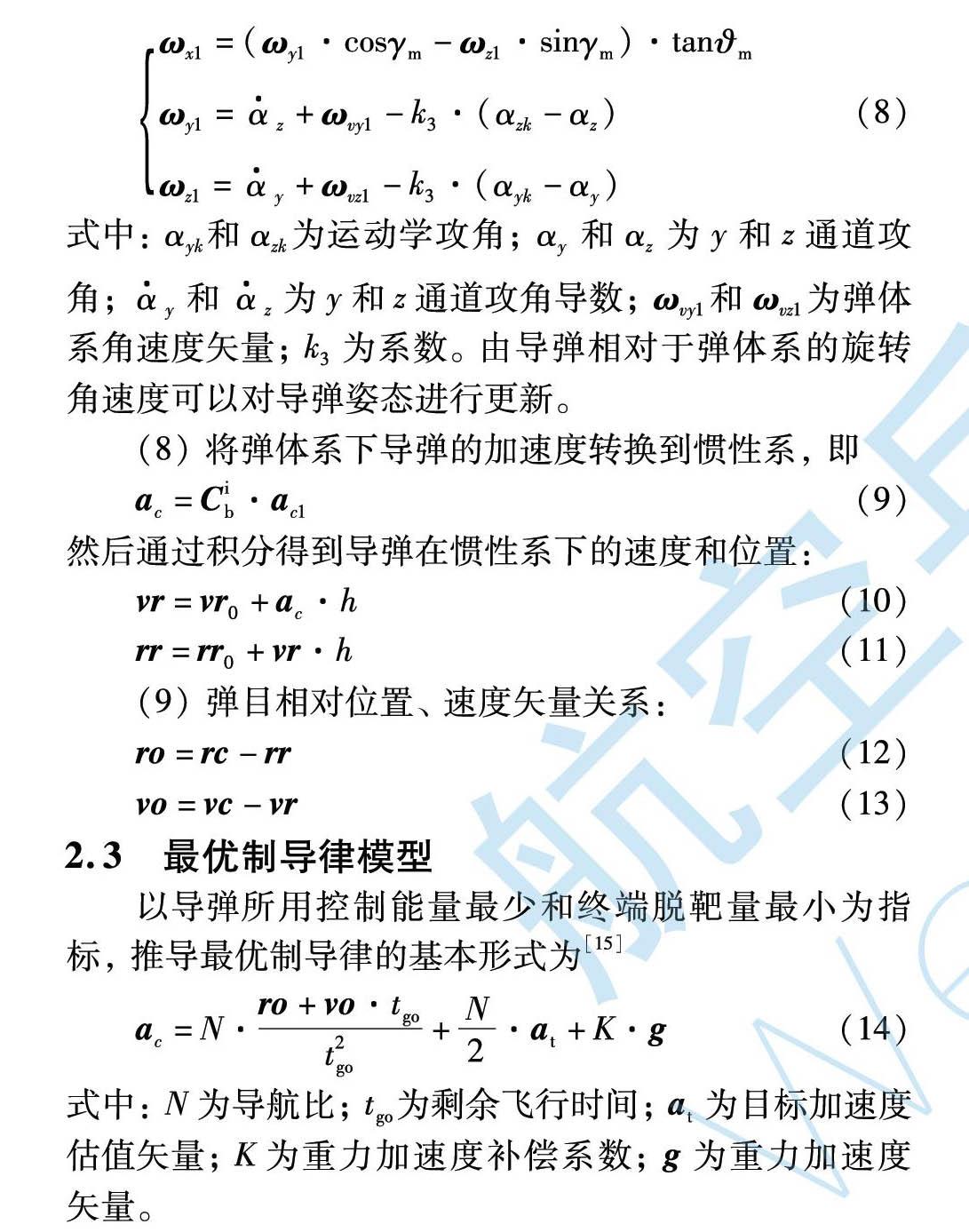
(7) 導彈相對于彈體坐標軸y1/z1的旋轉角速度表達式為
ωx1=(ωy1·cosγm-ωz1·sinγm)·tanm
ωy1=α·z+ωvy1-k3·(αzk-αz)
ωz1=α·y+ωvz1-k3·(αyk-αy) (8)
式中: αyk和αzk為運動學攻角; αy和αz為y和z通道攻角; α·y和α·z為y和z通道攻角導數; ωvy1和ωvz1為彈體系角速度矢量; k3為系數。 由導彈相對于彈體系的旋轉角速度可以對導彈姿態進行更新。
(8) 將彈體系下導彈的加速度轉換到慣性系, 即
ac=Cib·ac1 (9)
然后通過積分得到導彈在慣性系下的速度和位置:
vr=vr0+ac·h(10)
rr=rr0+vr·h(11)
(9) 彈目相對位置、 速度矢量關系:
ro=rc-rr(12)
vo=vc-vr(13)
2.3 最優制導律模型
以導彈所用控制能量最少和終端脫靶量最小為指標, 推導最優制導律的基本形式為[15]
ac=N·ro+vo·tgot2go+N2·at+K·g(14)
式中: N為導航比; tgo為剩余飛行時間; at為目標加速度估值矢量; K為重力加速度補償系數; g為重力加速度矢量。
3 利用超實時仿真估計剩余飛行時間
在剩余飛行時間估算中, 國內外廣泛使用當前的彈目相對距離除以彈目平均接近速度, 計算時假設目標在剩余飛行時間內作勻速運動, 導彈的平均速度一般通過估計的軸向加速度計算[16-18]。 導彈軸向加速度受發動機推力和氣動阻力的影響, 鑒于導彈未來飛行軌跡的不可預知性, 導彈剩余飛行時間內的氣動阻力不可能計算準確, 因此導彈的平均速度和剩余飛行時間的計算也不準確, 這會影響導彈對目標的精確打擊能力。
彈道超實時仿真能夠以當前的攻擊態勢為輸入, 快速仿真導彈攔截目標的過程。 運行結束后便可得到導彈的飛行速度變化情況, 據此計算導彈的平均速度等相關信息, 從而可以對剩余飛行時間進行更加準確的計算。
剩余飛行時間超實時估計方法:
(1) 記錄當前時刻及當前時刻導彈的姿態信息、 導彈和目標的位置、 速度信息, 作為超實時仿真模型的輸入, 其中當前時刻用來插值計算發動機推力和導彈質量。
(2) 根據以上輸入, 在設定的周期內運行彈道超實時仿真程序, 當運行至彈目交會時, 跳出并記錄本次仿真的導彈速度、 飛行時間等信息。
(3) 由記錄的超實時仿真結果計算導彈剩余飛行時間內的平均速度和彈目平均接近速度, 根據當前彈目距離可準確估算剩余飛行時間。
4 多彈協同制導律設計
多彈協同制導律的設計需要考慮更多的約束, 包括攻擊時間、 編隊隊形、 末端攻擊角度等。
4.1 多彈協同制導模型
導彈與目標的相對運動學方程可以表示為
r·i=Vtcosθt-Vmicosθmi
λ·i=Vtsinθt-Vmisinθmiri
γ·mi=amiVmi
γ·t=atVt (15)
式中: θm=γm-λ; θt=γt-λ。
圖3給出了多枚導彈打擊單個目標的示意圖。 圖中ri為第i枚導彈的彈目距離; Vi為第i枚導彈的速度; ai為第i枚導彈的法向加速度; γi為第i枚導彈的航向角; λi為第i枚導彈的視線角; θi為第i枚導彈的前置角。
4.2 帶攻擊時間約束的協同制導律設計
目前, 在多彈協同制導律設計時, 一般都假設導彈速度可控或恒定, 這不符合實際情況。 由于沿彈軸方向的加速度不可控, 所以導彈的控制過載只能施加在彈體系的y1, z1兩個方向。 為了保證多彈攻擊時間基本一致, 本文利用彈道超實時仿真方法估計每枚導彈的剩余飛行時間, 控制剩余飛行時間小的導彈在水平面內做機動, 以增大飛行路程, 達到和其他導彈同時遇靶的目的。
考慮到建模誤差及飛行過程中的各種干擾, 很難找到水平面控制過載與剩余飛行時間誤差之間明顯的對應關系, 本文利用彈道超實時仿真用時少的優勢, 快速預測施加的水平面控制過載達到的效果, 根據剩余飛行時間誤差的大小, 在線實時調整水平面的控制過載, 達到時間協同的控制目的。
以2枚導彈為例, 圖4給出了采用雙層架構的協同信息交互方式及時間協同控制的基本架構。 協同策略層綜合超實時仿真預測的彈道信息和導彈的剩余飛行時間信息, 生成協同控制指令反饋給制導控制層, 導彈依據反饋的信息進行制導控制飛行。
可見, 水平面的機動是以協調變量剩余飛行時間保持一致進行的閉環控制, 通過改變水平面控制過載的大小來實現, 不干涉鉛錘面控制過載的正常計算。
如圖5所示, 慣性系控制過載矢量Nc按照式(14)進行計算, 其在水平面和鉛垂面的分量分別為Ngz, Ngy, 在彈體系的分量分別為Nbz, Nby。 控制開始時水平面附加的控制過載為Nzf, 控制剩余飛行時間小的導彈在水平面內進行機動, 該控制過載與多枚導彈之間的剩余飛行時間的差值有關。 過載向量Ngz, Ngy和Nzf在彈體系的分量分別為Ngzby, Ngzby, Ngyby, Ngybz, Nzfby, Nzfbz。 從而可以得到彈體系的控制過載為
Nby=Kz·Ngzby+Ngyby+Nzfby
Nbz=Kz·Ngzbz+Ngybz+Nzfbz(16)
式中: Kz為不大于1的修正系數。
4.3 帶攻擊角度約束的協同制導律設計
多導彈攻擊單一目標時, 對每枚導彈的攻擊角度進行約束可以達到避免多彈碰撞、 提高殺傷效果的目的。 本文的攻擊角度約束指的是彈目視線矢量與目標速度矢量之間的夾角在遇靶時滿足設計要求, 這樣還能保證較小的脫靶量。 下面基于彈道成型制導理論設計具有攻擊角度約束的制導算法。
彈道成型制導律的簡化形式為[15]
Nc=6r+4r·tgo+2r·(tf)tgot2go+nt(17)
式中: r為相對位置; r·為相對速度; tf為終端遇靶時刻; tgo為剩余飛行時間; nt為目標機動過載。
經過數學運算, 式(17)可變換為
Nc=4Vcλ·+2Vc(λ-λf)tgo+nt(18)
式中: λ·=r+r·tgoVct2go為視線轉動角速度; Vc為彈目接近速度; λf為設定的終端視線角。 彈道超實時仿真可以提前預測出該角度的大小, 基于此設計終端的攻擊角度約束。
需要說明的是, 以上帶攻擊時間和攻擊角度約束的制導律都是基于導彈完整的六自由度模型, 在三維空間設計的, 導彈的控制過載在慣性系計算, 轉到彈體系進行實現。
5 仿真驗證
為驗證本文提出的多彈協同制導律的有效性, 設計仿真條件進行數字仿真。 仿真場景: 3枚導彈掛裝在2架載機上, 從不同的時刻發射后協同攻擊1個目標。
5.1 仿真條件設計
數字仿真條件: 2架載機的橫向間距為4 km, 高差為1 km, 導彈均為迎頭發射, 其中1號和3號導彈掛裝在同一架載機上, 1號導彈發射時彈目距離為70 km。 3枚導彈的發射時刻和遇靶時刻的攻擊角度約束詳見表1。
5.2 仿真結果與分析
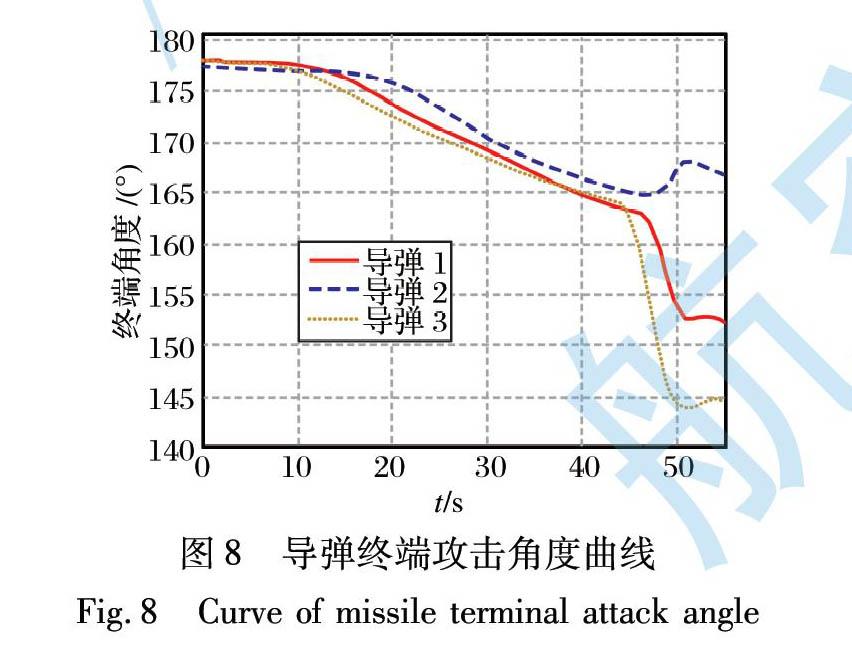
在六自由度仿真環境下進行彈道仿真, 仿真得到的結果統計如表2所示, 從表中可知, 3枚導彈基本按照設計的約束在同一時刻遇靶, 驗證了具有攻擊時間和攻擊角度約束的協同制導律的有效性, 同時給出了以1號導彈發射時刻為零點的相關變量變化曲線。
圖6所示為3枚導彈協同攻擊單個目標的相對運動軌跡, 可以明顯看出, 為了達到同時遇靶的設計目標, 1號和3號導彈在東向飛行約31 km后開始在水平面機動, 彈道發生彎曲, 而2號導彈的彈道較為平直。
圖7為3枚導彈彈體系y1, z1方向的控制過載變化曲線對比, 從過載變化情況看出, 先發射的1號和3號導彈在發射后22.5 s和25 s開始在水平面機動, 以增大飛行路程和飛行時間, 等待與后發射的2號導彈同時遇靶, 付出的代價是1號和3號導彈的末速較低, 當然這也與發射時彈目距離遠有關系。 最后發射的2號導彈在水平面內沒有額外機動, 直接對目標發起攻擊。 從曲線中也可以看出, 3枚導彈分別在41.5 s, 42.5 s, 43 s開始進行末端攻擊角度約束的調整控制。
圖8為3枚導彈彈目視線與目標速度矢量夾角的變化曲線, 可以看出, 在彈道末端基本實現了設定的角度約束要求。
6 結? 論
本文通過建立彈道超實時仿真模型, 探討了一種在導彈速度不可控的條件下, 適用于工程應用的、 多枚導彈同時滿足攻擊時間和末端攻擊角度約束的協同制導方法, 并在六自由度仿真環境中, 通過數字仿真對所提出的制導方法的有效性進行了驗證。
該方法利用超實時仿真對彈道未來信息進行預測, 建立了多彈飛行時間誤差與水平面控制過載之間的閉環調節方式, 但時間協同約束對多枚導彈的發射條件具有一定的局限性。 比如, 如果發射時刻間隔太長或發射條件差異太大, 就難以實現多彈攻擊時間上的協同, 且對導彈的末速有較大影響, 反而會降低對目標的毀傷效果。
接下來會進一步研究該方法的適用范圍, 同時將該方法推廣至攻擊機動目標的協同制導研究中。
參考文獻:
[1] 樊會濤, 張蓬蓬. 空空導彈面臨的挑戰[J]. 航空兵器, 2017(2): 3-7.
Fan Huitao, Zhang Pengpeng. The Challenges for Air-to-Air Missile[J]. Aero Weaponry, 2017(2): 3-7.(in Chinese)
[2] 槐澤鵬, 梁雪超, 王洪波, 等. 多彈協同及其智能化發展研究[J]. 戰術導彈技術, 2019(5): 77-85.
Huai Zepeng, Liang Xuechao, Wang Hongbo, et al. Research on Multi-Missile Collaborative and Its Intelligence Development[J]. Tactical Missile Technology, 2019(5): 77-85.(in Chinese)
[3] 楊劍影, 周佳玲, 魏小倩. 多導彈攻擊高機動目標的分布式協同制導關鍵技術[J]. 航空兵器, 2017(3): 3-12.
Yang Jianying, Zhou Jialing, Wei Xiaoqian. Key Technologies of Distributed Cooperative Guidance and Control Method for Multiple Missiles Attacking the Maneuvering Target[J]. Aero Weaponry, 2017(3): 3-12.(in Chinese)
[4] 郭正玉, 韓治國. 基于快速非奇異終端滑模的多彈協同制導律設計[J]. 航空兵器, 2020, 27(3): 62-66.
Guo Zhengyu, Han Zhiguo. Multi-Missile Cooperative Guidance Law Design Based on Fast Non-Singular Terminal Sliding Mode[J]. Aero Weaponry, 2020, 27(3): 62-66.(in Chinese)
[5] 郭正玉, 王超磊, 錢航, 等. 帶有攻擊角約束的大機動目標協同攻擊制導律[J]. 西北工業大學學報, 2020, 38(6): 1257-1265.
Guo Zhengyu, Wang Chaolei, Qian Hang, et al. Cooperative Intercepting Guidance Law for Large Maneuvering Target with Impact Angle Constraint[J]. Journal of Northwestern Polytechnical University, 2020, 38(6): 1257-1265.(in Chinese)
[6] 宋俊紅, 宋申民, 徐勝利. 帶有攻擊角約束的多導彈協同制導律[J]. 中國慣性技術學報, 2016, 24(4): 554-560.
Song Junhong, Song Shenmin, Xu Shengli. Cooperative Guidance Law for Multiple Missiles with Impact Angle Constraints[J]. Journal of Chinese Inertial Technology, 2016, 24(4): 554-560.(in Chinese)
[7] Wu P, Yang M. Integrated Guidance and Control Design for Missile with Terminal Impact Angle Constraint Based on Sliding Mode Control[J]. Journal of Systems Engineering and Electronics, 2010, 21(4): 623-628.
[8] Saleem A, Ratnoo A. Lyapunov-Based Guidance Law for Impact Time Control and Simultaneous Arrival[J]. Journal of Guidance, Control, and Dynamics, 2015, 39(1): 164-173.
[9] Chen X T, Wang J Z. Nonsingular Sliding-Mode Control for Field-of-View Constrained Impact Time Guidance[J]. Journal of Gui-dance, Control, and Dynamics, 2018, 41(5): 1214-1222.
[10] 孫雪嬌, 周銳, 吳江, 等. 多導彈分布式協同制導與控制方法[J]. 北京航空航天大學學報, 2014, 40(1): 120-124.
Sun Xuejiao, Zhou Rui, Wu Jiang, et al. Distributed Cooperative Guidance and Control for Multiple Missiles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(1): 120-124.(in Chinese)
[11] 鄒麗, 孔繁峨, 周銳, 等. 多導彈分布式自適應協同制導方法[J]. 北京航空航天大學學報, 2012, 38(1): 128-132.
Zou Li, Kong Fan’e, Zhou Rui, et al. Distributed Adaptive Cooperative Guidance for Multi-Missile Salvo Attack[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(1): 128-132.(in Chinese)
[12] 劉翔, 梁曉庚. 攻擊角約束多攔截彈協同制導控制一體化研究[J]. 西北工業大學學報, 2019, 37(2): 273-282.
Liu Xiang, Liang Xiaogeng. Integrated Guidance and Control of Multiple Interceptors with Impact Angle Constraints Considered[J]. Journal of Northwestern Polytechnical University, 2019, 37(2): 273-282.(in Chinese)
[13] 張振林, 張科, 郭正玉, 等. 一種新型領從式多彈協同制導律設計[J]. 航空兵器, 2020, 27(5): 33-38.
Zhang Zhenlin, Zhang Ke, Guo Zhengyu, et al. Design of a New Guidance Law for Guided Multiple Missiles[J]. Aero Weaponry, 2020, 27(5): 33-38.(in Chinese)
[14] 高薇, 張強, 孫軍. 通過超實時仿真驗證軌控策略方法研究[J]. 航天控制, 2008, 26(2): 71-73.
Gao Wei, Zhang Qiang, Sun Jun. Method of Validating Orbit Control Strategy by Super Real-Time Simulation[J]. Aerospace Control, 2008, 26(2): 71-73.(in Chinese)
[15] Zarchan P.Tactical and Strategic Missile Guidance[M]. Washington: American Institute of Aeronautics and Astronautics, Inc, 1997.
[16] Tahk M J, Ryoo C K, Cho H. Recursive Time-to-Go Estimation for Homing Guidance Missiles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(1): 13-24.
[17] Lee G K F. Estimation of the Time-to-Go Parameter for Air-to-Air Missiles[J]. Journal of Guidance, Control, and Dynamics, 1985, 8(2): 262-266.
[18] Ryoo C K, Tahk M J, Cho H. Practical Time-to-Go Estimation Methods for Optimal Guidance[C]∥Guidance, Navigation, and Control Conference and Exhibit, 1999.
Research on Cooperative Guidance Law of Multi-Missile
Based on Trajectory Super-Real Time Simulation
Zhang Peng1*, Lu Hao1, Shen Xin2
(1.China Airborne Missile Academy, Luoyang 471009, China;
2.The First Military Representative Office of Air Force Equipment Department in Luoyang, Luoyang 471009, China)
Abstract: It is very difficult to conduct time cooperation guidance of multi-missile when the velocity of missile is uncontrollable. Based on the trajectory super real-time simulation method, which can gives out time-to-go exactly as well as future trajectory information, a closed-loop control system between the horizontal control overload and the flight time error of missiles is built. So that the flight time tends to be consistent and the cooperative impact time is realized. In addition, a trajectory shaping guidance law with impact angle constraints is designed. The designed guidance law is verified by 6-DOF simulation, and the results show that the multi-missile cooperative guidance law based on the super real-time trajectory simulation can guarantee that multi-missile hit the target with the desired impact angle simutaneously.
Key words: cooperative guidance law; impact time constraint; impact angle constraint; super real-time simulation; time-to-go; multi-missile coordination