CUD1-L2 控制板在西門子6RA70 型直流調(diào)速裝置的應(yīng)用
2021-01-06 02:38:02張保師
中國金屬通報(bào) 2020年10期
關(guān)鍵詞:故障
張保師
(河鋼股份有限公司承德分公司、河北省釩鈦工程技術(shù)研究中心,河北 承德 067000)
作為河鋼承鋼軋鋼產(chǎn)線,西門子6RA70 直流調(diào)速裝置。西門子6RA70 型直流調(diào)速裝置就有三套裝備,還包括串聯(lián)六脈動和并聯(lián)十二脈動等。通過直聯(lián)的方式保證直流電動機(jī)的正常運(yùn)作。但是由于現(xiàn)階段技術(shù)的改革,西門子6RA70 型直流傳動裝置被新型號取代和停產(chǎn),轉(zhuǎn)而出現(xiàn)了西門子6RA80 型直流傳動裝置。而且所生產(chǎn)的備件都是6RA80 型直流調(diào)速裝置的備件。根據(jù)西門子官方反饋:新型的CUD1-L2 控制板能夠取代以往的L1 版控制板,實(shí)現(xiàn)上下的兼容。但是在實(shí)際的應(yīng)用當(dāng)中出現(xiàn)故障較多,對此需要設(shè)計(jì)良好的方案,并對方案進(jìn)行優(yōu)化處理,使之與西門子6RA70 型直流調(diào)速裝置相匹配,減少因數(shù)據(jù)偏差造成的系統(tǒng)故障,提升使用過程的安全程度和穩(wěn)定性。
1 優(yōu)化安裝CUD1-L2控制板方案的必要性
1.1 6RA70 型直流調(diào)速裝置介紹
西門子6RA70 型直流調(diào)速裝置由三相交流電源直接供電,使用了微型計(jì)算機(jī)技術(shù)來實(shí)現(xiàn)數(shù)字化的給定、比較、調(diào)節(jié)和控制,屬于數(shù)字化的整流控制裝置。內(nèi)部結(jié)構(gòu)緊湊,能實(shí)現(xiàn)對運(yùn)行狀態(tài)的實(shí)時(shí)監(jiān)控,進(jìn)行自我診斷以及出現(xiàn)故障自動報(bào)警功能,性能較好,可以為直流電機(jī)電樞供電,能通過對操作方式設(shè)計(jì)不同的給定方式來滿足不同的生產(chǎn)要求。整體的自動化水平高,精度高且功能齊全。
1.2 安裝出現(xiàn)的問題
由于6RA70 型直流調(diào)速裝置的停產(chǎn),通用備件不足,很難實(shí)現(xiàn)原裝標(biāo)配。這種時(shí)候要想對6RA70 型傳輸裝置進(jìn)行改造,就需要安裝新型的CUD1-L2 控制板。在安裝完控制板之后系統(tǒng)內(nèi)的電流會出現(xiàn)迅速升高現(xiàn)象,有時(shí)會造成系統(tǒng)斷電停止運(yùn)行,與此同時(shí)系統(tǒng)會報(bào)出故障。
舊型的CUD1-L1 控制板安裝之后,電機(jī)在運(yùn)行過程中電流曲線非常平穩(wěn),很少出現(xiàn)設(shè)備故障無法運(yùn)行的狀況。而相比之下,新版的CUD1-L2 控制板安裝之后,整體的運(yùn)行不平穩(wěn),電流波動較大,變流器因電流的較大波動和速度告停,嚴(yán)重影響電機(jī)正常運(yùn)轉(zhuǎn)。
1.3 優(yōu)化安裝方案的益處
西門子6RA70 型直流調(diào)速裝置屬于大型的設(shè)備,企業(yè)更換設(shè)備成本極高,一旦安裝CUD1-L2 控制板不成功,故障頻發(fā),就需要企業(yè)更新設(shè)備。通過對控制板應(yīng)用方案的優(yōu)化,為企業(yè)節(jié)約了大量的資金投入,為企業(yè)創(chuàng)造更多的經(jīng)濟(jì)價(jià)值。新的控制板的應(yīng)用能大大提升設(shè)備的運(yùn)行效率和安全穩(wěn)定程度,大大減少運(yùn)行過程中出現(xiàn)的故障,延誤工程進(jìn)度。此外也彰顯著我國技術(shù)水平的高超和先進(jìn)程度,為其他相關(guān)設(shè)備的研發(fā)優(yōu)化提供有價(jià)值的參考方向,促進(jìn)我國鋼鐵企業(yè)的持續(xù)穩(wěn)定發(fā)展。因而需要分析現(xiàn)有的安裝問題,尋找有效的設(shè)計(jì)方案進(jìn)行優(yōu)化和實(shí)施,真正意義上實(shí)現(xiàn)CUD1-L2 控制板向下包容的特點(diǎn),在生產(chǎn)中得到廣泛應(yīng)用。
2 安裝CUD1-L2控制板的設(shè)計(jì)方案
2.1 從速度環(huán)著手設(shè)計(jì)方案
2.1.1 速度環(huán)的工作原理
CUD1 控制板在西門子6RA70 型直流調(diào)速裝置正常運(yùn)轉(zhuǎn)過程中所發(fā)揮的作用十分重要。它主要是用于對輸入裝置發(fā)出的各種信號進(jìn)行分析,然后對信號進(jìn)行比較和計(jì)算,最后把計(jì)算的結(jié)果向其他控制單元輸出。比較單元也是進(jìn)行數(shù)值的輸出,主編碼器和從編碼器都是用來反饋數(shù)據(jù)的,比較單元需要將兩者反饋的數(shù)值進(jìn)行對比,再把比較得出的數(shù)值向控制單元輸出。
設(shè)定新方案的目的是為了解決現(xiàn)階段安裝CUD1-L2 控制板導(dǎo)致的電機(jī)障礙。因此需要從目前的電機(jī)故障著手,由于速度波動在一定程度上會影響到電流波動,所以對電機(jī)實(shí)際運(yùn)行過程中的速度和與之相應(yīng)的電流運(yùn)行曲線進(jìn)行了對比分析。具體情景電機(jī)傳輸過程屬于一個(gè)閉環(huán)系統(tǒng),在這個(gè)系統(tǒng)當(dāng)中存在著外環(huán)控制和內(nèi)環(huán)控制。外環(huán)控制依靠速度環(huán)展開,內(nèi)環(huán)控制是使用電流環(huán)進(jìn)行約束和調(diào)整。當(dāng)運(yùn)行過程中速度環(huán)產(chǎn)生了波動時(shí),此時(shí)為了將外環(huán)當(dāng)中出現(xiàn)的信號波動超調(diào)值消除掉,內(nèi)環(huán)就進(jìn)行運(yùn)轉(zhuǎn),對波形進(jìn)行反方向的調(diào)整,從而實(shí)現(xiàn)對速度環(huán)產(chǎn)生的速度值的調(diào)整。在這個(gè)流程的運(yùn)轉(zhuǎn)期間就會出現(xiàn)電機(jī)的電流波動狀況。
2.1.2 方案設(shè)計(jì)
針對以上對運(yùn)行原理的解析,為此做出了假設(shè):能不能通過減少運(yùn)算單元和比較單元兩個(gè)單元的計(jì)算任務(wù)量,或者繞開這兩個(gè)單元,實(shí)現(xiàn)速度波動量的減少,從而達(dá)到消除安裝CUD1-L2 控制板時(shí)出現(xiàn)的電流波動狀況的目的。
首先需要對速度環(huán)展開分析。在速度環(huán)中進(jìn)行數(shù)據(jù)反饋的裝置是編碼器。主編碼器從脈沖分配板經(jīng)過之后,輸入的信號被放大,進(jìn)入6RA70 型直流調(diào)速裝置的比較單元當(dāng)中。而從編碼器數(shù)值攜帶的輸入信號被脈沖分配板放大之后進(jìn)入到6RA70 型直流調(diào)速裝置的PLC 當(dāng)中。期間在進(jìn)入脈沖分配板時(shí)主編碼器的速度反饋會在此時(shí)出現(xiàn)不同程度的信號失真。對于這種信號失真CUD1-L2 控制板相較CUD1-L1 控制板更加敏感,運(yùn)行時(shí)就會出現(xiàn)劇烈的電流波動。
將編碼器脈沖數(shù)當(dāng)作速度比較反饋和對發(fā)電機(jī)反饋的電壓值進(jìn)行測速然后作為速度比較反饋是電機(jī)進(jìn)行速度反饋的兩種形式。要想解決信號失真問題,可以采用第二種對發(fā)電機(jī)進(jìn)行測速并做速度比較反饋。對此可以用測試發(fā)電機(jī)的電壓信號這一方式來取代編碼器脈沖信號,把發(fā)電機(jī)電壓信號測速直接輸入到西門子6RA70 型直流調(diào)速裝置當(dāng)中,在此期間羅列出速度環(huán)的各項(xiàng)參數(shù),對他們進(jìn)行反復(fù)多次的調(diào)試,最終得到合理的參數(shù),從而將速度環(huán)出現(xiàn)的電流波動降低,處于允許的數(shù)值范圍內(nèi)。具體的操作是將端子外接輸入信號線纜進(jìn)行更換,主要是CUD1 控制板當(dāng)中的X171 和X172 等,從而實(shí)現(xiàn)對速度環(huán)電流波動的控制。
2.2 從包絡(luò)線曲線著手優(yōu)化方案設(shè)計(jì)
2.2.1 包絡(luò)線運(yùn)行原理
在6RA70 型直流調(diào)速裝置當(dāng)中包絡(luò)線環(huán)節(jié)主要是對于運(yùn)行速度的監(jiān)控。它的工作原理是將電機(jī)在實(shí)際運(yùn)行過程中的運(yùn)行曲線與計(jì)算曲線進(jìn)行對比,發(fā)現(xiàn)誤差,并方便展出出現(xiàn)誤差的參數(shù)項(xiàng)進(jìn)行改進(jìn)。從啟動電機(jī)一直到關(guān)閉電機(jī)的整個(gè)運(yùn)行過程當(dāng)中,給每個(gè)位置點(diǎn)都設(shè)定出可運(yùn)行的最高速度,而一旦電機(jī)運(yùn)行速度超過這一位置點(diǎn)所設(shè)定的最高速度的15%時(shí),安全裝置被啟動,安全回路就會運(yùn)行起來自動斷電。此時(shí)系統(tǒng)中就會報(bào)出包絡(luò)線超速。在整個(gè)計(jì)算環(huán)節(jié)對于速度拐點(diǎn)和加減速階段的比較曲線計(jì)算較為復(fù)雜且存在難度。前文中提到了更換CUD1-L2控制板時(shí)出現(xiàn)的包絡(luò)線超速故障,這些故障大多是電機(jī)運(yùn)行的減速段到爬行段的拐點(diǎn)處。下圖1 為CUD1 控制板的比較單元原理。
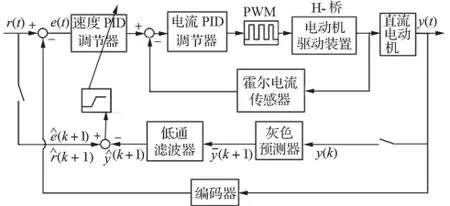
圖1 CUD1 控制板的比較單元原理
在原廠的CUD1-L1 控制板尚未停產(chǎn)時(shí),安裝CUD1-L1 控制板在6RA70 型直流調(diào)速裝置當(dāng)中,整體運(yùn)行過程中電流相對穩(wěn)定,運(yùn)行各點(diǎn)包括拐點(diǎn)處時(shí)的運(yùn)行曲線平順,不會出現(xiàn)故障。但是在使用了CUD1-L2 控制板后,運(yùn)行過程中電流波動較大,在運(yùn)行到拐點(diǎn)處時(shí)運(yùn)行曲線的波動值遠(yuǎn)遠(yuǎn)超過了計(jì)算所得的最高數(shù)值,安全回路斷電,從而導(dǎo)致包絡(luò)線報(bào)超速故障。在進(jìn)行了多次的實(shí)驗(yàn)對比以后發(fā)現(xiàn),從勻減速到爬行段的拐點(diǎn),該點(diǎn)處計(jì)算后的比較曲線整定值與實(shí)際運(yùn)行曲線幾乎是完全重合,說明運(yùn)行過程中軌道未發(fā)生變化,曲線系數(shù)一致,更有可能存在變量問題。但是從運(yùn)行的速度對比來看,實(shí)際運(yùn)行速度比計(jì)算的速度相比遠(yuǎn)遠(yuǎn)大于1.15 倍之多,可以得出結(jié)論是實(shí)際運(yùn)行速度過快遠(yuǎn)超計(jì)算值所導(dǎo)致的,可以對試驗(yàn)中的速度參數(shù)進(jìn)行適當(dāng)增加。實(shí)際速度曲線與理想速度曲線對比如下圖2 所示。
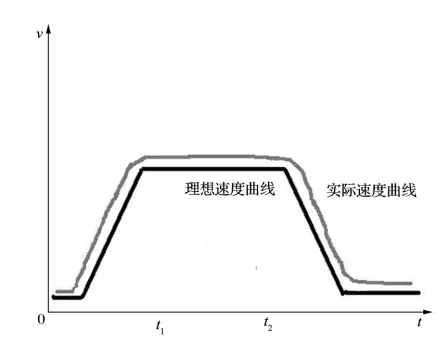
圖2 理想速度與實(shí)際速度曲線
包絡(luò)線超速比較曲線計(jì)算公式:vt2-v02=2as。
其中vt=初始速度,v0=加速后速度,a=減速度,S=減速距離。
在試驗(yàn)階段,初始速度vt和加速后速度v0等同于實(shí)際的運(yùn)行速度,在對程序中的數(shù)據(jù)庫參數(shù)進(jìn)行比較后發(fā)現(xiàn)減速度比實(shí)際運(yùn)行減速度值小,為0.69m/s2(當(dāng)井深度為600m 時(shí),勻速段運(yùn)行速度在10.99m/s2)。然而實(shí)際運(yùn)行中的減速度遠(yuǎn)遠(yuǎn)大于這一數(shù)值,從而導(dǎo)致電機(jī)在減速變爬行拐點(diǎn)處時(shí)出現(xiàn)包絡(luò)線超速故障。
2.2.2 方案設(shè)計(jì)
在經(jīng)過了專業(yè)人員10 余次的反復(fù)試驗(yàn)之后,最后測得精準(zhǔn)數(shù)據(jù)實(shí)際減速度為0.74m/s2。然后將試驗(yàn)過程中需要的減速度參照值由0.69m/s2變更為0.74m/s2。通過提高試驗(yàn)時(shí)的減速度,減少實(shí)際速度與理想速度之間存在的差距,讓實(shí)際運(yùn)行時(shí)與計(jì)算設(shè)定的各項(xiàng)數(shù)值相匹配,從而最大程度的消除包絡(luò)線的超速故障,更好的進(jìn)行速度監(jiān)控工作。
3 結(jié)語
文章主要探討了新型的CUD1-L2 控制板安裝到西門子6RA70 型直流調(diào)速裝置過程中出現(xiàn)的各種問題,并通過對速度環(huán)和包絡(luò)線曲線兩個(gè)環(huán)節(jié)進(jìn)行方案設(shè)定和優(yōu)化,并將這些方案應(yīng)用到了北洺河鐵礦的多個(gè)電機(jī)中。同時(shí)試驗(yàn)期間對編碼器的脈沖系數(shù)進(jìn)行適當(dāng)調(diào)整,將電機(jī)運(yùn)行期間的實(shí)際位置值與實(shí)際值相吻合,大大提升速度監(jiān)測保護(hù)的效率,讓電機(jī)正常運(yùn)轉(zhuǎn),減少故障。通過這些新的方案的研究和應(yīng)用為我國軋鋼企業(yè)的發(fā)展減少阻礙,降低購置機(jī)器的成本,也為今后的設(shè)備改良提供思路以供參考。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年8期)2015-04-17 03:32:52
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年7期)2015-04-17 02:12:40
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39