多表冗余慣導數據融合算法及在自對準中的應用
2021-01-06 09:01:36郭建剛陳鵬鄭偉
北京航空航天大學學報 2020年12期
郭建剛,陳鵬,鄭偉
(1.國防科技大學 空天科學學院,長沙410073; 2.北京航天時代激光導航技術有限責任公司,北京100094;3.上海航天技術研究院北京研發中心,北京100081)
激光陀螺捷聯慣導系統(Laser Strapdown Inertial Navigation System,LSINS)具有動態范圍廣、耐沖擊振動、可靠性高等優點,遠征一號、嫦娥探測器等空間飛行器及多數現役火箭均采用LSINS提供姿態、位置等導航信息。多表冗余慣導系統通過儀表冗余設計,顯著提高系統的可靠性,國外如波音777飛機的FT/ADIRS(Fault-Tolerant/Air Data Inertial Reference System)容錯大氣數據參考系統和“德爾它”系列火箭的RIFCA(Redundant Inertial Flight Control Assembly)冗余激光捷聯慣導系統[1]等都采用了多表冗余設計。國內對多表冗余慣導系統進行了多年的研究與探索,已有多型采用三正交加斜置冗余配置的慣導系統得到工程應用,其中斜置冗余儀表僅用于故障檢測。
空間飛行器等起飛前需要通過初始對準獲得姿態初值,目前普遍使用光學瞄準方案。與光學瞄準相比,慣導自對準需要的設備和人力更少,操作流程大大簡化,更符合當前低成本、快速發射的發展趨勢[2]。國內外的專家學者對晃動基座上的自對準技術進行了大量研究,提出了許多更優的自對準方案和自對準算法,顯著提高了對準精度[3-6]。
對于多表冗余慣導系統而言,冗余儀表用于故障檢測和隔離,同時還可通過數據融合技術提高慣導系統的測量和導航精度[7-10]。通過多傳感器數據融合技術,充分利用所有的冗余測量數據,可以得到姿態和速度信息的最優估計值。數據融合技術可以有效抑制測量數據中的隨機誤差,為提高慣導系統自對準精度提供了另外一條有效途徑。
本文基于某型多表冗余慣導系統,對數據融合技術在多表冗余慣導系統自對準中的應用及數據融合算法進行了研究。
1 數據融合算法
1.1 慣導儀表構型
該型慣導系統采用三正交兩斜置的十表(5只激光陀螺,5只石英加速度計)冗余設計,其中斜置儀表只用于判故。慣導系統中,陀螺和加速度計的安裝定向方式如圖1所示,儀表測量矩陣如式(1)所示。
圖1中,X1Y1Z1為載體坐標系,OX1為縱軸,OY1為法向軸,OZ1為橫向軸;XsYsZs為慣導坐標系,OS軸正向與OXs、OYs、OZs軸正向的夾角分別為125.9°、46.6°、115.4°,OT軸正向 與OXs、OYs、OZs軸 正 向 的 夾 角 分 別 為46.5°、56.5°、118.0°;向量Gi和Ai分別為第i只陀螺和第i只加速度計的測量軸向,i=x,y,z,s,t。
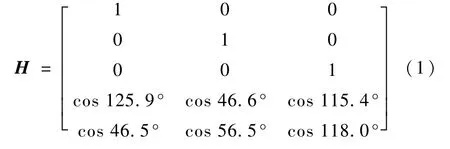
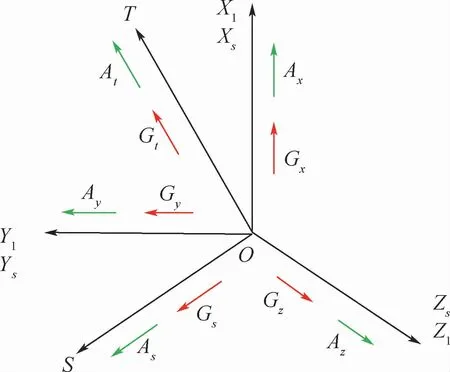
圖1 慣性儀表安裝定向示意圖Fig.1 Schematic diagram of inertial instrument installation orientation
1.2 基于最小二乘的數據融合算法
最小二乘估計(Least Square Estimation,LSE)的特點是算法簡單,不必知道與被估計量及量測量有關的任何統計信息[11]。NASA的SIRU項目使用加權最小二乘(Weighted Least Squares Estimation,WLSE)算法進行冗余儀表的數據融合[12]。
對于測量系統:

式中:X為n維狀態矢量;Z為m維量測量;H 為m×n維量測矩陣,m>n;V為m維測量噪聲,其均值為零,方差陣為R。
X的最小二乘估計為
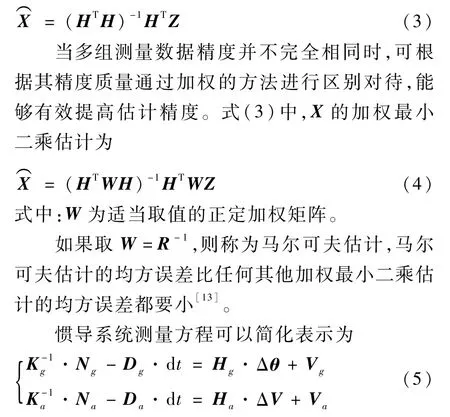
式中:Ng和Na分別為陀螺和加速度計的測量輸出,m維向量,m為陀螺或加速度計的數量;Kg和Ka分別為陀螺和加速度計的當量矩陣,m階對角陣;Dg和Da分別為陀螺和加速度計零偏,m維向量;d t為系統采樣時間間隔;Hg和Ha分別為陀螺和加速度計的一次項系數矩陣,也即測量矩陣,m×3維,當不考慮零部件加工和安裝誤差時,Hg=Ha;Δθ和ΔV分別為載體在d t時間內的角增量和速度增量,3維向量;Vg和Va分別為陀螺和加速度計的測量噪聲,m維向量,均值為零,其方差陣分別為Rg和Ra。
1.3 算法精度分析
不考慮零部件加工和安裝誤差,陀螺和加速度計系統的測量矩陣均如式(1)所示,假設5只儀表(陀螺或者加速度計)的測量精度相同,輸出標準差均為1σ。
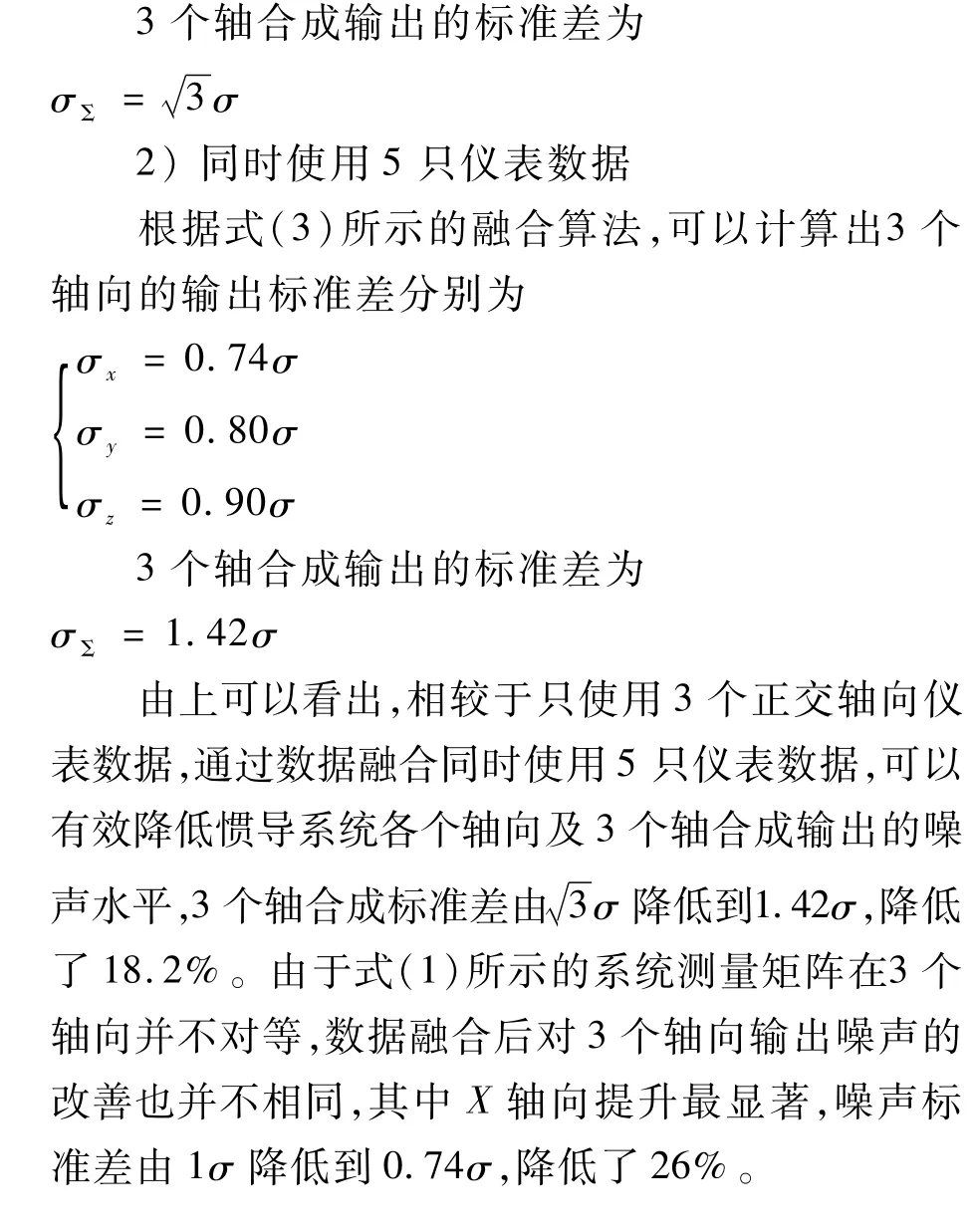
1)只使用正交儀表數據
3個軸向的輸出標準差為

2 Monte Car1o仿真
編寫了MATLAB仿真計算程序,對靜基座上的自對準進行仿真,仿真中慣導坐標系與地理坐標系(東北天坐標系)重合。工程上通常挑選精度較好的儀表安裝在正交軸向,斜置方向儀表精度略差,如正交儀表精度為0.01(°)/h左右,而斜置儀表精度范圍為0.015~0.02(°)/h。因此,仿真中假設斜置儀表噪聲標準差比正交儀表高50%,并使用馬爾可夫估計進行數據融合。為對算法在不同儀表精度下的融合效果進行對比,共進行了4組不同精度的仿真,每組進行500次Monte Carlo打靶。分別通過:①只使用3只正交儀表數據直接解算;②通過式(7)進行5只儀表的數據融合,2種方法得到的自對準結果進行對比,偏航角的統計結果如表1所示。
結果表明,相較于只使用正交儀表數據,通過數據融合同時使用5只儀表數據,可以有效提高慣導偏航角自對準精度,其中誤差均值降低了11%,對準結果統計標準差降低了14%。這表明對于如式(1)所示的三正交兩斜置慣導系統,即便斜置儀表精度顯著低于正交儀表,通過數據融合,仍然能夠顯著提高慣導的自對準精度,使斜置冗余儀表數據得到充分利用。
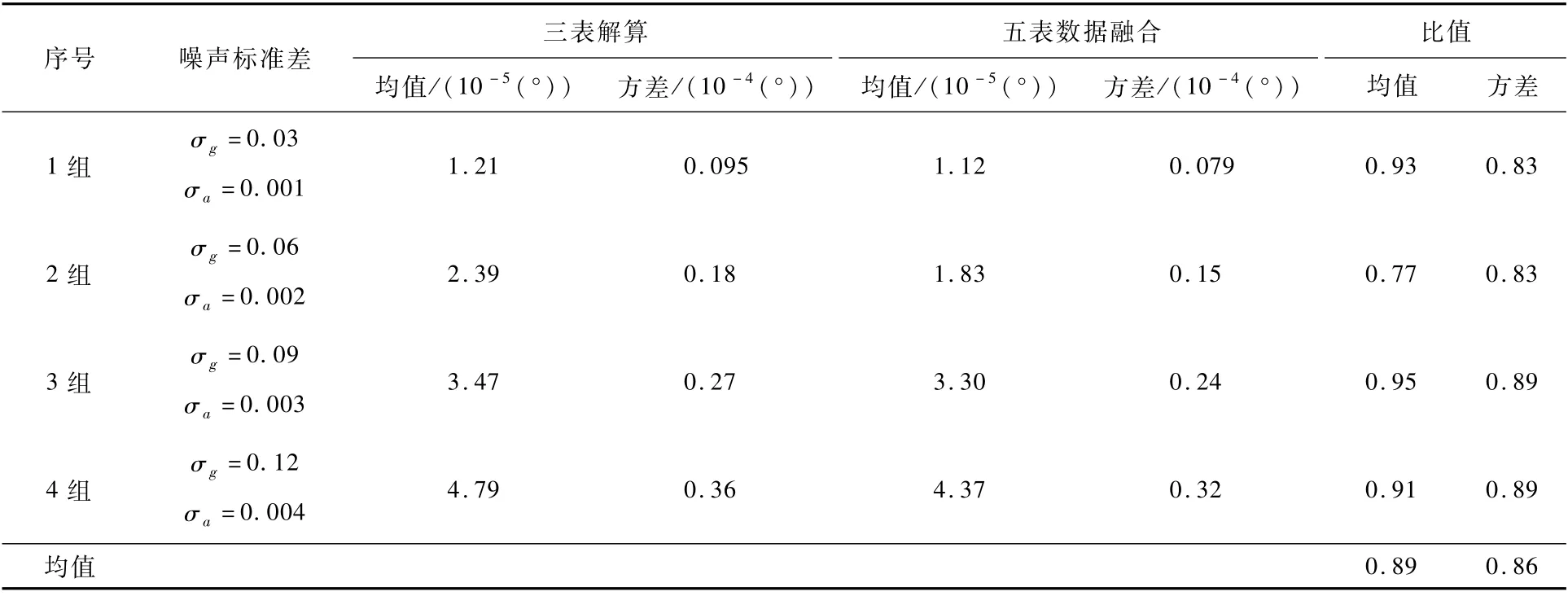
表1 偏航角誤差的Monte Car1o仿真結果對比Tab1e 1 Comparison of Monte Car1o simu1ation resu1ts of vaw ang1e error
3 自對準試驗和算法改進
3.1 靜態自對準試驗
為驗證本文中數據融合算法的有效性,利用該型慣導系統在大理石平板上進行了靜態自對準試驗。5只激光陀螺的零偏穩定性在0.01(°)/h左右。試驗時,將慣組固聯在六面體工裝上,慣導按照地理坐標系(東北天坐標系)放置,工裝靠緊大理石平板靠塊,如圖2所示,對準時間5 min,共進行12組試驗。
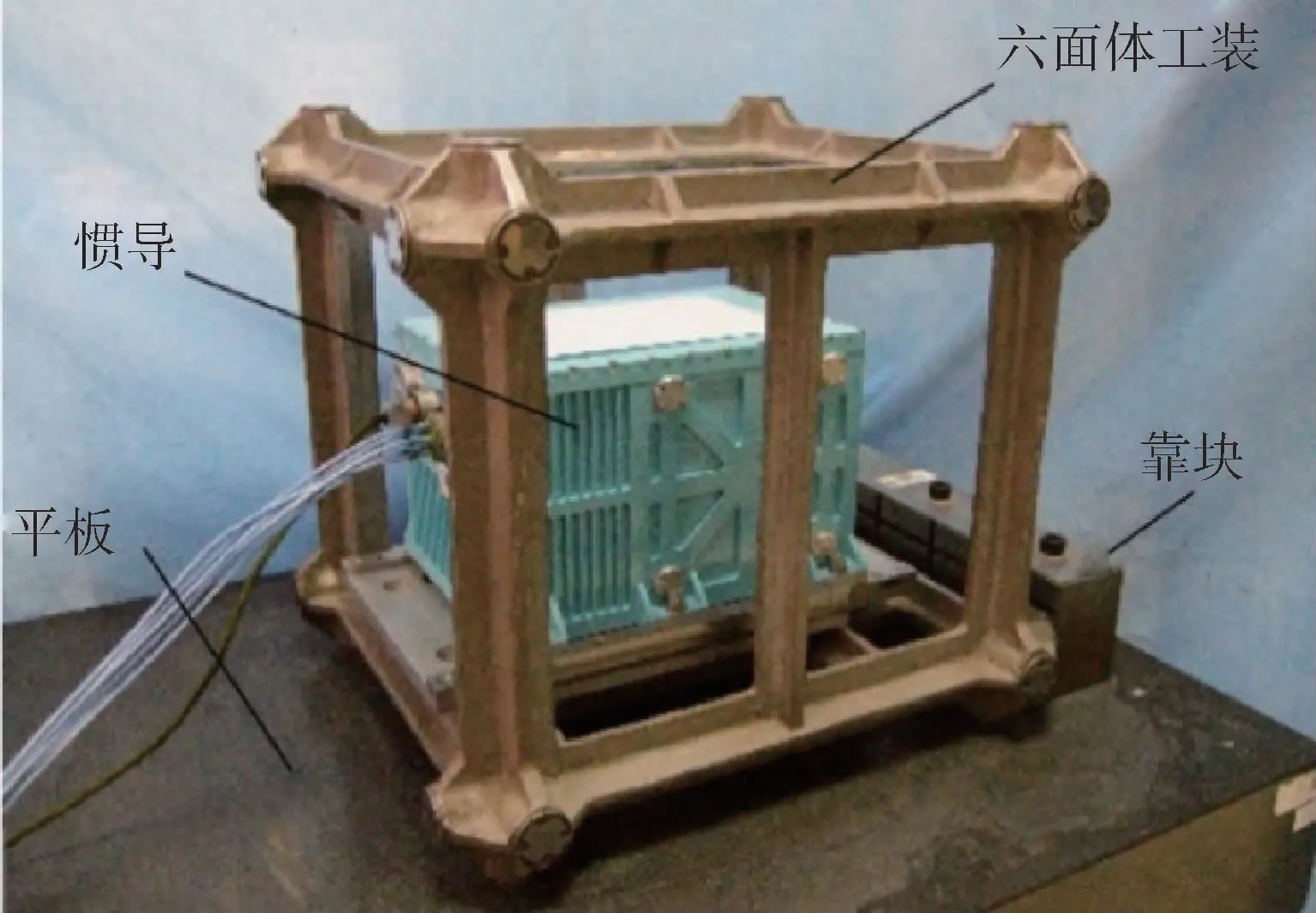
圖2 激光陀螺捷聯慣導自對準試驗Fig.2 Self-alignment experiment of LSINS
考慮試驗現場條件無法獲取慣導系統真實的航向基準,為了評估算法的有效性,采用在同一方位下進行多次對準,以多次對準結果的標準差的方法間接進行評估[14]。每組試驗數據分別通過3只正交儀表直接解算和5只儀表數據融合2種方法進行處理,得到Δθ和ΔV,然后進行自對準。
試驗中使用如式(7)所示的馬爾可夫估計進行數據融合,對2種方法的自對準結果進行對比,如表2所示。只使用正交儀表直接解算時,偏航角的統計標準差為2.8′(1σ),同時使用5只儀表數據進行數據融合時,偏航角的統計標準差為2.4′(1σ),精度提高了14%。

表2 偏航角自對準結果對比Tab1e 2 Se1f-a1ignment r esu1t comparison of vaw ang1es
3.2 加權矩陣的優化
該型慣導系統各儀表原始輸出均為脈沖形式,間隔20 ms,輸出脈沖數對應慣導在慣性坐標系下的角增量和速度增量。靜態自對準試驗時,由于地球自轉角速度和重力加速度較小,導致儀表輸出的量化誤差明顯。試驗中儀表的一段輸出數據如表3所示,其中Ai和Gi(i=x,y,z,s,t)分別為第i只陀螺和加速度計的脈沖輸出。同時,儀表輸出噪聲非白噪聲形式,尤其是激光陀螺。因此,對儀表輸出直接取方差不能反映儀表精度狀況,影響了基于數據方差的馬爾可夫估計的數據融合算法的效果。
慣性儀表的零偏穩定性是衡量儀表精度、影響導航誤差的重要參數,同時儀表零偏穩定性也比較容易準確獲得。因此,選擇各儀表的零偏穩定性作為加權系數,構造如式(8)所示的加權矩陣,其中Ωi(i=x,y,z,s,t)為第i只陀螺和加速度計的零偏穩定性。

使用如式(8)所示的加權矩陣和加權最小二乘估計的數據融合算法,對試驗數據重新進行處理,結果如表4所示,偏航角的統計標準差為2.1′(1σ)。相較于馬爾可夫估計,通過加權最小二乘算法和式(8)所示的加權矩陣進行數據融合,自對準精度進一步提高。
多表冗余慣導系統在實際工程應用中需要先經故障診斷技術對故障儀表進行診斷隔離,再使用正常儀表完成系統重構。慣導系統自對準過程中,火箭受發射場陣風等干擾因素的影響,箭體產生順風向和橫風向晃動[15],但晃動頻率較低、量級較小;同時可以通過地測對載荷和火箭慣導系統的輸出進行地面判讀。因此,初始對準過程中不用擔心慣導系統冗余儀表的判故問題,上述數據融合算法有一定的工程實用價值。
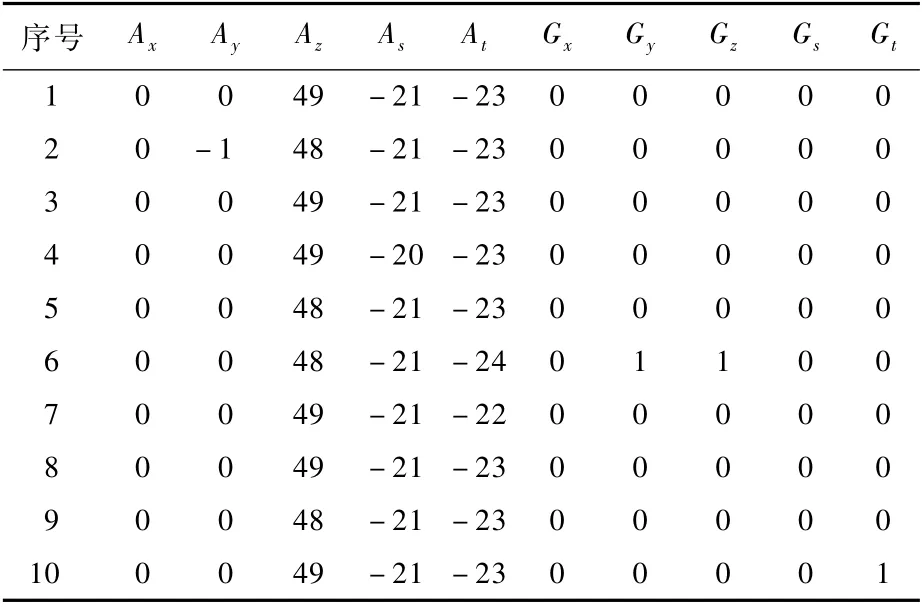
表3 儀表20 ms脈沖增量輸出Tab1e 3 Incrementa1 pu1se output of sensors with 20 ms interva1
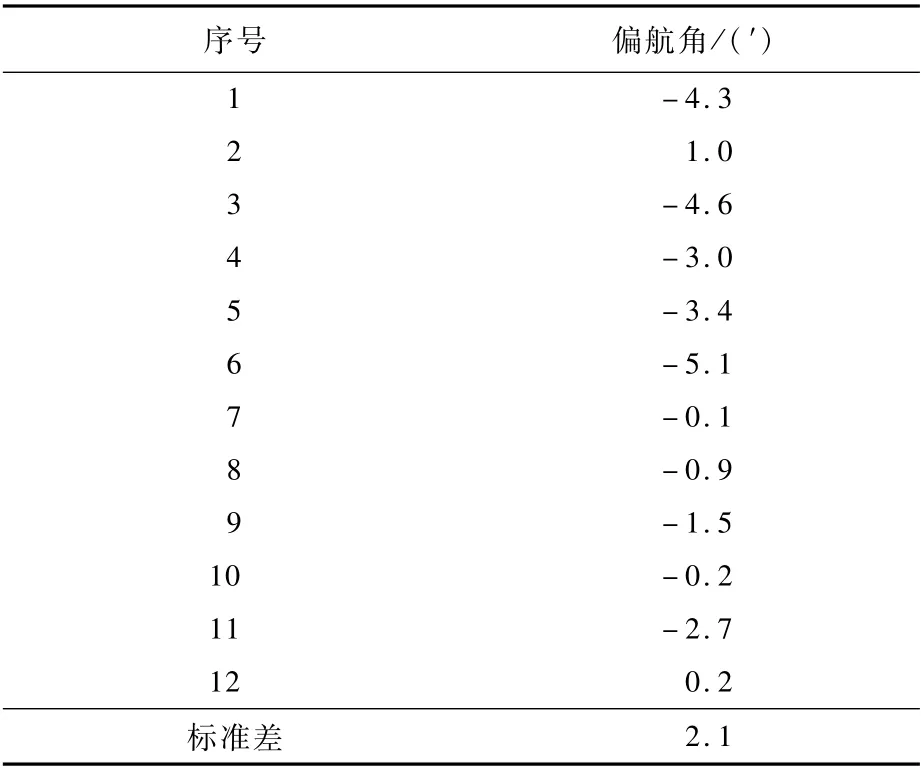
表4 五表數據融合的偏航角自對準結果Tab1e 4 Se1f-a1ignment resu1ts of vaw ang1es bv data fusion of five instruments
4 結 論
基于某型三正交兩斜置冗余的十表慣導系統,針對其自對準過程中的數據融合問題:
1)通過分析和仿真,證明數據融合技術可以有效提高多表冗余慣導系統的自對準精度。
2)開展慣導靜態自對準試驗,結果表明,相較于只使用正交儀表的數據,數據融合可以使斜置冗余儀表的數據得到充分利用,系統自對準精度提高了16%。
3)在靜態自對準試驗的基礎上,構造了基于儀表零偏穩定性的加權矩陣,改進后的算法比馬爾可夫估計的略有提高。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
裝備制造技術(2019年12期)2019-12-25 03:06:46