基于增益調度的高壓共軌柴油機軌壓控制研究及驗證
2021-01-06 01:52:52于正同王驥超韓冰潔付立斌
車用發動機 2020年6期
關鍵詞:發動機
于正同,王驥超,韓冰潔,付立斌
(1.中國航空工業西集團公司西安航空計算技術研究所,陜西 西安 710065;2. 東風康明斯發動機有限公司,湖北 襄陽 441004)
高壓共軌燃油控制系統能夠實現噴油參數柔性控制,保證了多缸發動機噴油壓力一致,可以實現噴油量和噴油時刻的靈活精確控制,使發動機燃燒達到最佳狀態,從而提高發動機的排放特性、動力性和經濟性[1]。然而高壓共軌燃油控制系統是一個非線性、時變和遲滯系統,無法建立精確的軌壓數學模型,導致傳統的線性PID控制算法精度低、跟隨性差[2-3]。為了解決上述問題,國內部分學者將軌壓控制過程分為低怠速、高怠速、調速和跛行回家等多個工況,采用開環控制和閉環控制相結合的方法[4]。在穩態工況具有較好的控制效果,在部分異常工況或工況切換過程中,軌壓控存在超調振蕩、收斂速度慢、易陷入局部控制死區等問題[5-6]。此外由于發動機工況設計過于復雜,軌壓控制切換時機不易把握。
基于上述考慮,設計了一種基于增益調度的高壓共軌柴油機軌壓控制算法。該算法降低了工況劃分難度,以共軌管燃油流量守恒原理為基礎,采用基于增益調度的PID控制算法對全工況軌壓統一處理控制。其中增益系數根據發動機轉速和軌壓偏差調度控制算法獲取。
1 共軌系統組成及原理
共軌燃油系統由低壓油泵、高壓油泵、油量計量閥、共軌管、控制器、軌壓傳感器、噴油器、低壓輸油管和高壓輸油管等組成。其基本工作原理:在發動機運轉時,低壓油泵將燃油從油箱輸送到高壓泵的入口,電子控制器通過控制IMV閥開度控制共軌管的油壓力,使共軌管內的燃油壓力控制在0.3~160 MPa,在共軌管的高壓作用下噴出霧狀燃油。軌壓隨著高壓泵進油量、噴油器的噴射量和回油量的動態變化而變化,其穩定性直接影響發動機理想的噴油規律。其工作原理見圖1。
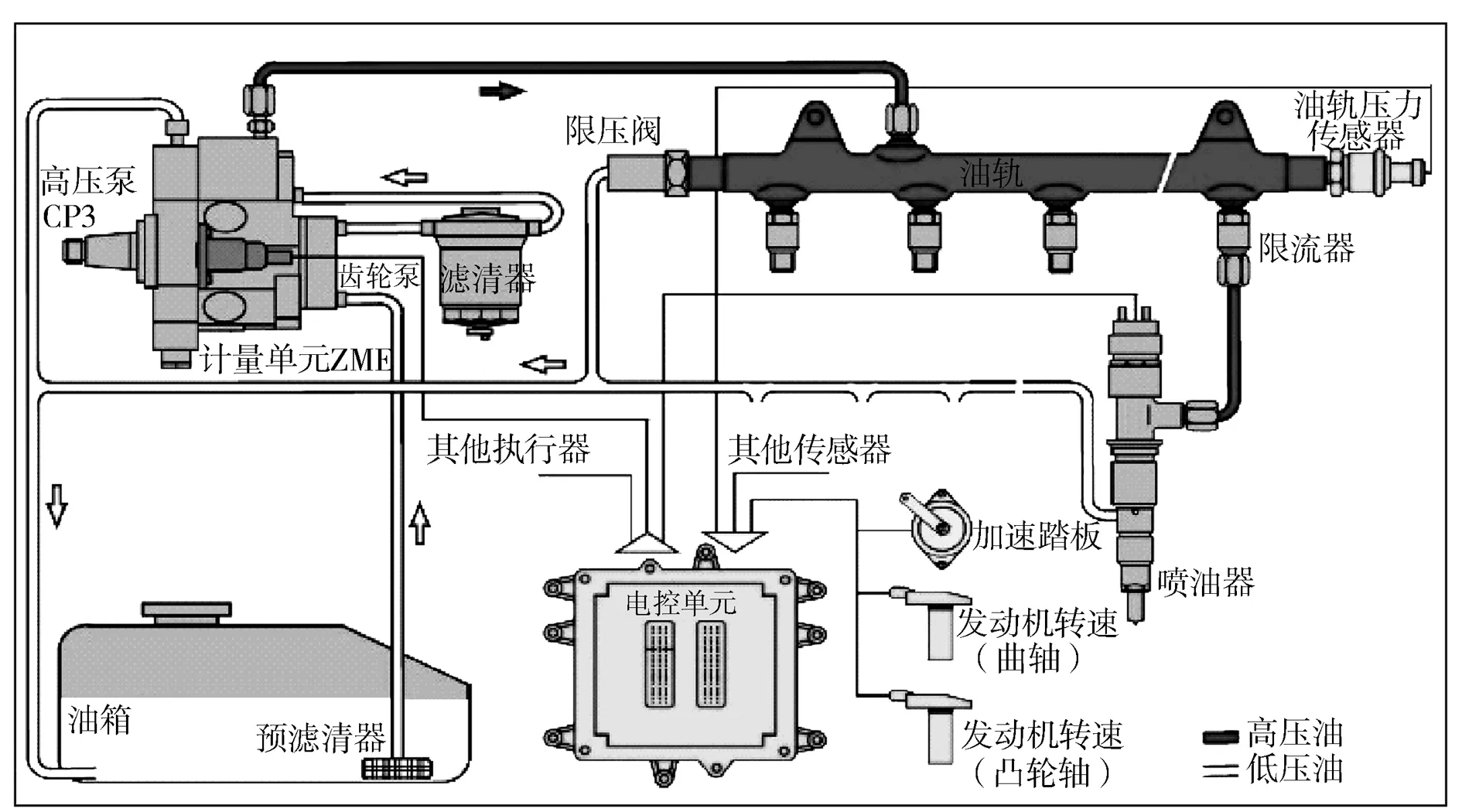
圖1 高壓共軌系統原理圖
2 軌壓系統控制算法
根據高壓泵和IMV閥的工作特征,軌壓控制以PWM控制輸出周期和占空比作為控制量,采用前饋控制和PID閉環控制相結合的方法,在發動機全工況下控制共軌管的反饋軌壓與命令壓力保持一致。在發動機起動初期,采用開環控制,IMV閥完全打開,迅速建立軌壓。待軌壓大于目標值后,進入閉環控制,基本控制算法見圖2。首先通過發動機轉速和命令油量查命令軌壓三維MAP表,通過命令軌壓與反饋軌壓差采用PID控制獲得燃油流量,與前饋燃油量相加獲得總噴油量,根據總燃油流量轉換電流值,再根據電流值計算PWM控制周期和占空比。
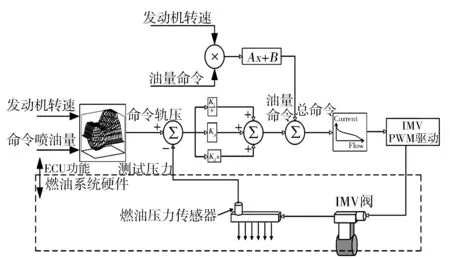
圖2 軌壓控制基本過程
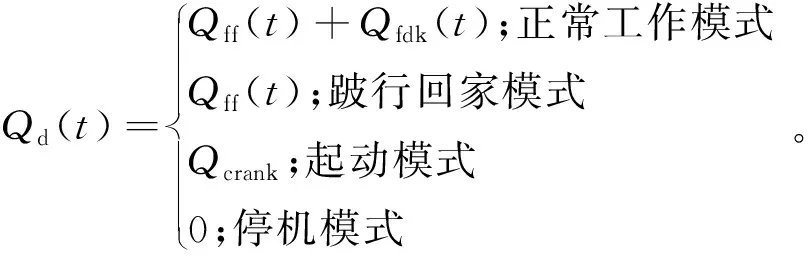
忽略共軌管因內部壓力變化而引起體積變化的影響,可認為共軌管是一個固定體積的容積,共軌管的壓力值由流入和流出共軌管的燃油流量決定[10],因此采用控制燃油流量的方法實現軌壓的動態變化調整。燃油流量計算見式(1),當發動機正常運行時,燃油流量通過前饋和反饋共同計算獲得。當發動機燃油系統出現故障時進入跛行回家模式,無法形成閉環計算,將前饋燃油量作為需求噴油量。在發動機起動模式下,需要迅速建立軌壓,起動燃油量為標定常量。在停機模式下,燃油流量為0。
(1)
式中:Qd(t)為IMV閥入口燃油需求量;Qff(t)為前饋控制燃油需求量;Qfdk(t)為閉環反饋燃油需求量;Qcrank為起動燃油需求量,該值為為標定值。
2.1 命令軌壓值計算
為了能夠讓發動機工作在最佳狀態,在不同的運行工況下對軌壓的需求不一樣,在起動初期需要迅速建立軌壓,在高轉速高負荷下,需要高壓增加霧化效果,降低噴油時長。命令軌壓值主要與發動機轉速、噴油量和燃油溫度等因素有關。首先根據噴油量和發動機轉速查詢當前軌壓基本命令值,再根據噴油量和燃油溫度獲得軌壓補償值,將軌壓基本命令值和軌壓補償值進行相加獲得基非限幅軌壓,非限幅軌壓經過命令軌壓變化率限值后,再經過最大和最小值限幅,最終獲得命令軌壓值(見圖3)。
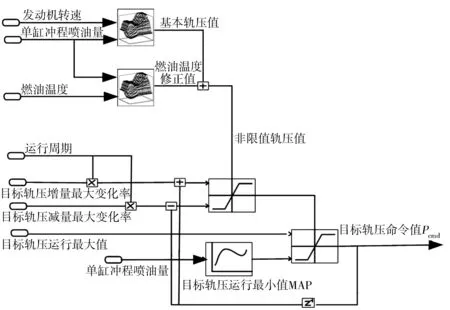
圖3 命令軌壓控制算法
2.2 帶前饋的PID控制器結構
在發動機運行過程中,發動機轉速和負載經常出現連續變化過程,會引起噴油量和噴油頻率頻繁變化,導致軌壓劇烈波動。通過前饋控制可及時補償因工況變化帶來的軌壓波動[7-8]。前饋燃油量計算見圖4。

圖4 噴油量前饋計算框圖
閉環控制可以補償以下因素造成的軌壓波動:高壓泵輸出燃油波動;共軌管和高壓油管形變產生的軌壓變化;噴油器打開等其他擾動影響[9-10]。PID控制結構如見圖5。
2.3 增益系數調度控制
高壓共軌燃油系統具有時變、非線性和遲滯等特點。在瞬態工況下或工況切換時,采用單一增益系數PID控制無法取得較好的控制效果。為了優化軌壓反饋控制效果, PID控制增益系數根據軌壓偏差調度控制算法和發動機運行工況采用不同控制算法。提高了軌壓控制的適應性和魯棒性,獲得更高的控制精度和更快的響應特性。
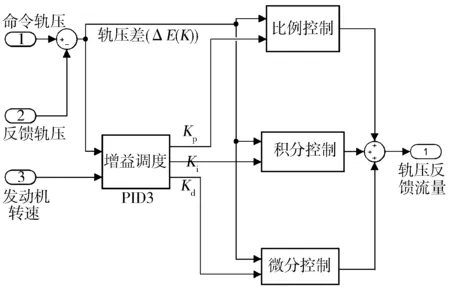
圖5 PID控制器結構
PID控制增益系數采用分級方法實現動態調整,其原理見圖6。將軌壓偏差值設定4個邊界:Pover1,Pover2,Punder1和Punder2。4個邊界將軌壓偏差分為5個區域,每個區域的PID控制增益系數為獨立計算實現。根據軌壓偏差ΔE(t)所落區域決定使用的所在區域PID控制系數的計算策略。
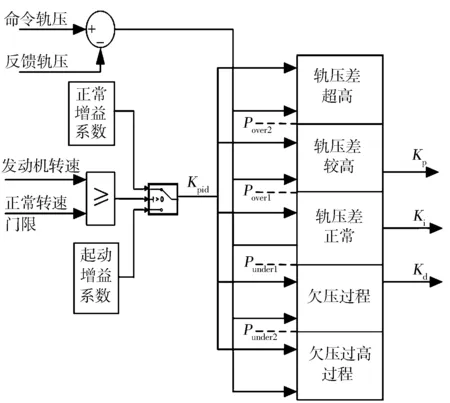
圖6 軌壓控制增益系數調度策略控制
2.3.1軌壓偏差正常范圍
軌壓偏差在正常范圍內,PID控制系數為標定常量值,該值根據發動機具體型號確定。此時軌壓處于穩定狀態,PID控制過程為線性控制過程。PID系數計算見式(2)。
Kp=Cp1,Ki=Ci1,Kd=Cd1。
(2)
式中:Cp1,Ci1和Cd1為標定常量值。
2.3.2軌壓偏差超高過程
在軌壓偏差達到超高壓門限值(Pover2)時,PID控制器需要采取保護措施抑制這種過壓變化,使軌壓迅速到達預控目標, PID控制器系數重新采用一套標定值,計算過程見式(3)。
Kp=Cp2,Ki=Ci2,Kd=Cd2。
(3)
式中:Cp2,Ci2和Cd2為標定常量值。
2.3.3軌壓偏差較高過程
當軌壓偏差在正常和超高范圍內,此時控制參數設置為定值Kx,控制參數計算見式(4)。

(4)
式中:Kover為軌壓偏差超高過程PID控制系數;Knomal為軌壓偏差正常范圍PID控制系數。
2.3.4軌壓偏差超欠壓過程
超欠壓過程與超高壓過程相似,由于反饋軌壓離目標軌壓過大,為了適應PID控制,對PID控制系數重新采用一套標定值,計算過程見式(5)。
Kp=Cp3,Ki=Ci3,Kd=Cd3。
(5)
式中:Cp3,Ci3和Cd3為標定常量值。
2.3.5軌壓偏差欠壓過程
當軌壓偏差在正常和超欠壓范圍內,計算過程與軌壓偏差較高過程類似,此時控制參數設置為Ky,控制參數計算過程見式(6)。

(6)
式中:Kunder為軌壓偏差超欠壓過程PID控制系數。
2.4 油量計量閥驅動單元
選用 BOSCH CP3.3高壓油泵為控制對象,其內部IMV閥為電流驅動型比例電磁閥。該電磁閥PWM波控制頻率范圍為165~195 Hz,線圈電阻為2.6~3.1 Ω,最大電流是1.6 A,缺省狀態為全開。發動機控制器通過PWM波控制線圈電流,其電磁閥驅動電流和油泵流量關系見圖7。通過軌壓控制器輸出的燃油流量Q(t)獲得IMV閥驅動電流。
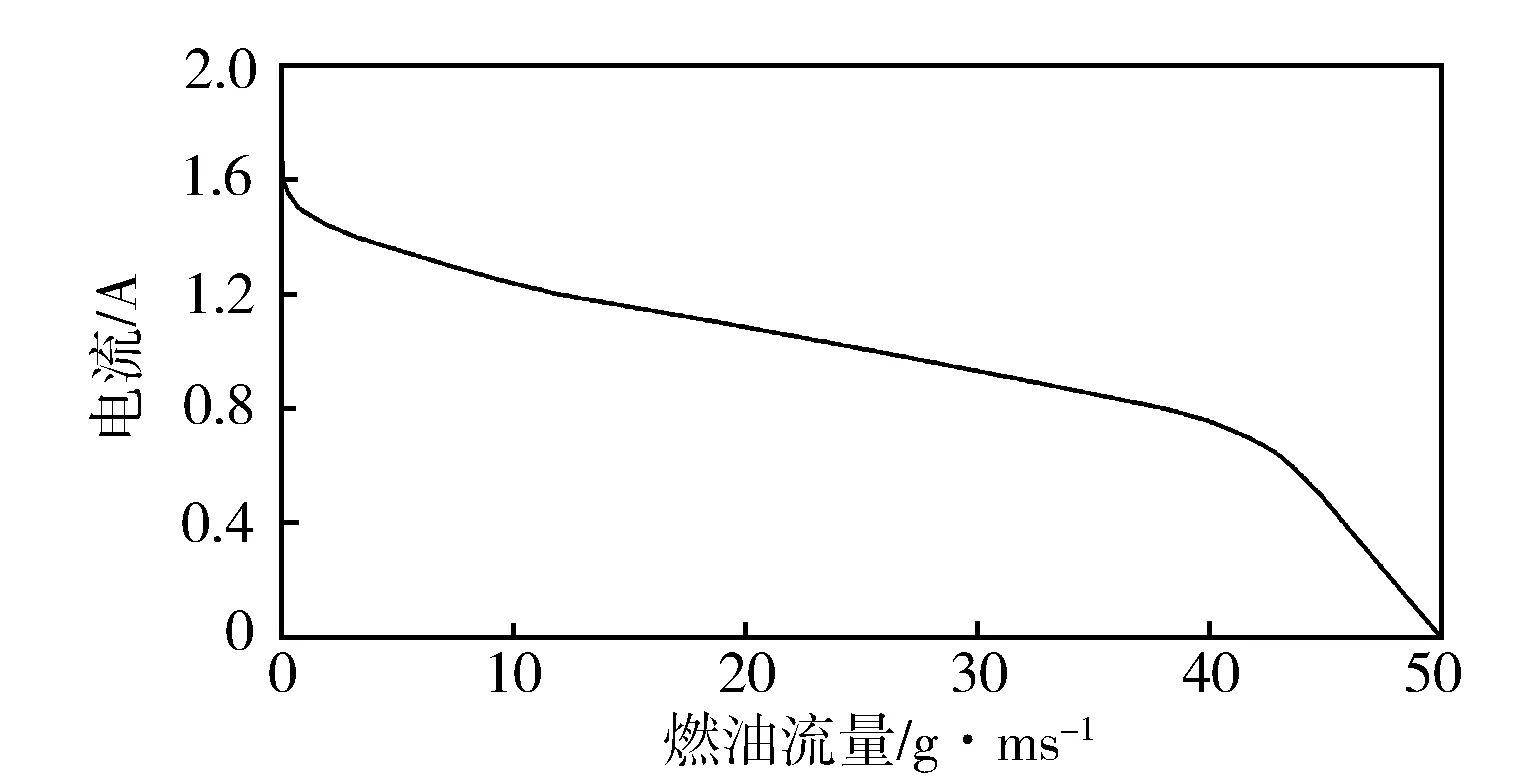
圖7 油量計量閥電流與流量關系
根據供電電壓和IMV閥電阻,計算出需要的PWM 占空比驅動IMV閥。由于蓄電池電壓受發電機、噴油器打開以及整車其他設備干擾,需要對蓄電池電壓進行一階濾波,計算過程見式(7)。

(7)
式中:VB(t)為采集的蓄電池電壓;K為濾波系數,該值為常量,通過標定實現。
根據命令電流將輸出驅動轉換成需要的占空比,計算過程見式(8)。

(8)
式中:RIMV為IMV閥內阻;Doffest為補償修正值,該值為標定量。
3 軌壓控制算法驗證
3.1 軌壓控制驗證設備
利用Matlab對上述軌壓控制算法進行模型化編程,并生成代碼。將生成的代碼集成在基于32位微處理器MPC5566自主研發的高壓共軌柴油發動機控制器中,設定軌壓控制算法運行10 ms周期任務。在一臺4缸4.5 L高壓共軌柴油機上開展了軌壓驗證試驗。柴油機試驗臺架見圖8,柴油機參數見表1。
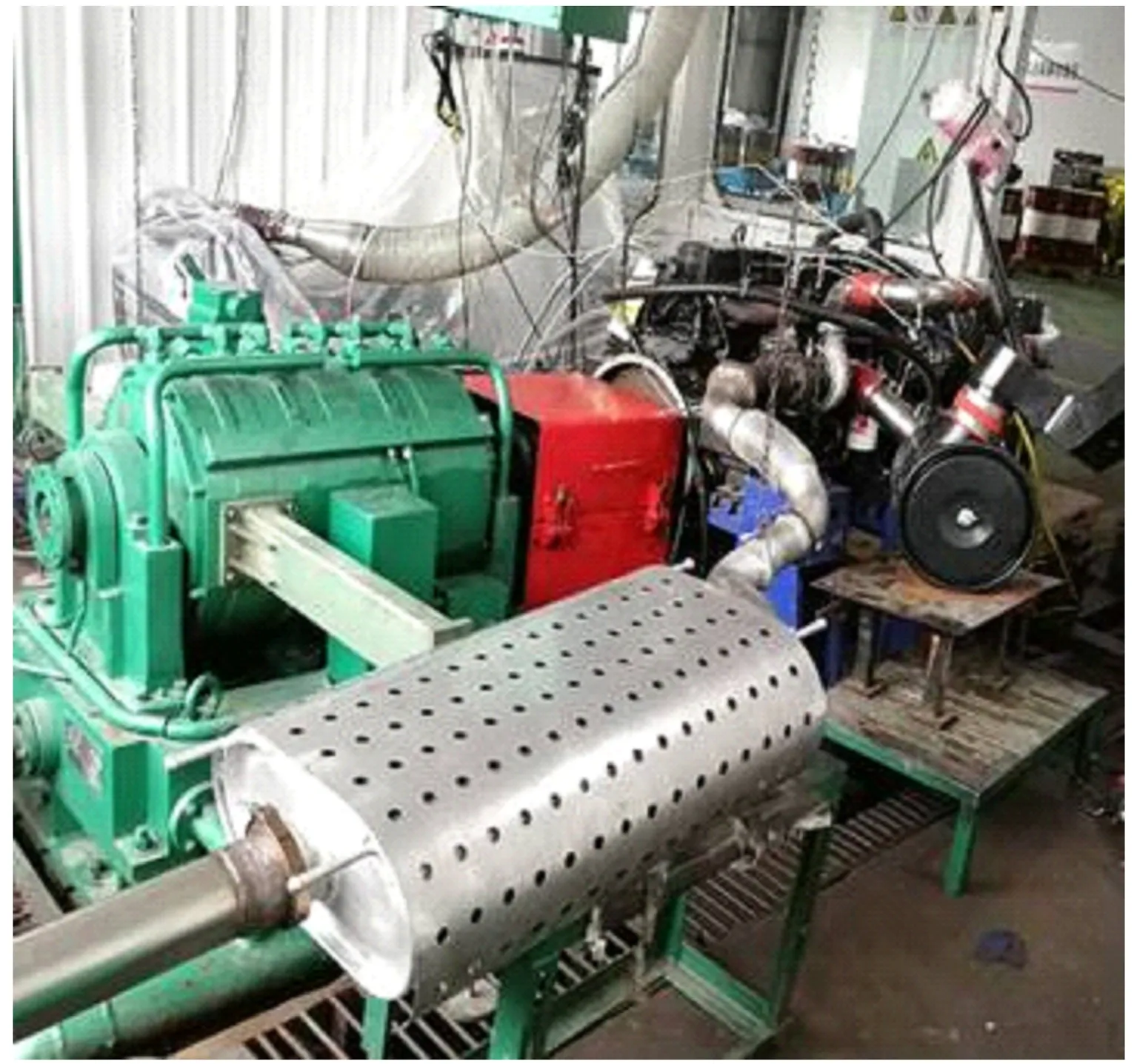
圖8 發動機臺架
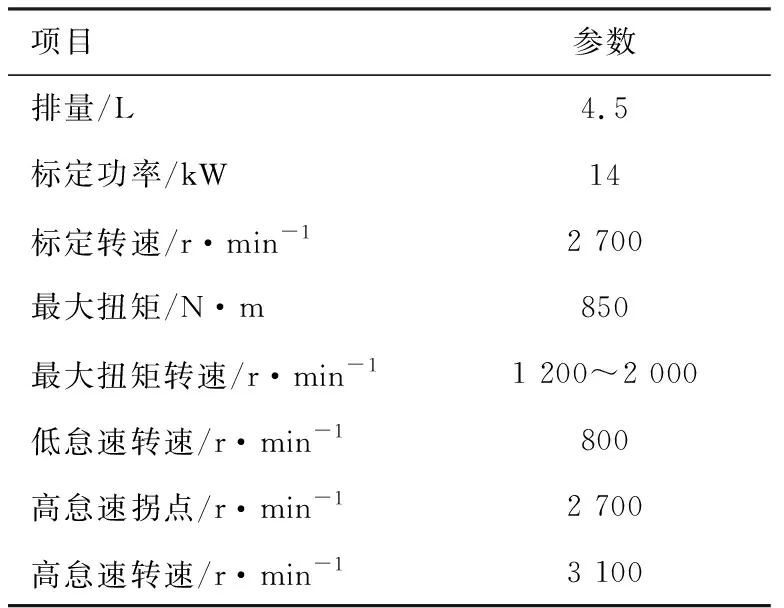
表1 發動機基本參數
3.2 軌壓控制性能測試驗證
為了驗證穩態和動態工況下軌壓控制效果,在發動機臺架上分別開展了起動工況、怠速工況、標定功率點工況和加速工況驗證工作。
由圖9可知,在發動機起動過程中,發動機能夠迅速建立油軌壓力,在1 s后,反饋軌壓和命令軌壓保持一致,軌壓偏差在±2 MPa以內。在起動工況到怠速工況切換過程中,軌壓偏差在±2 MPa以內。
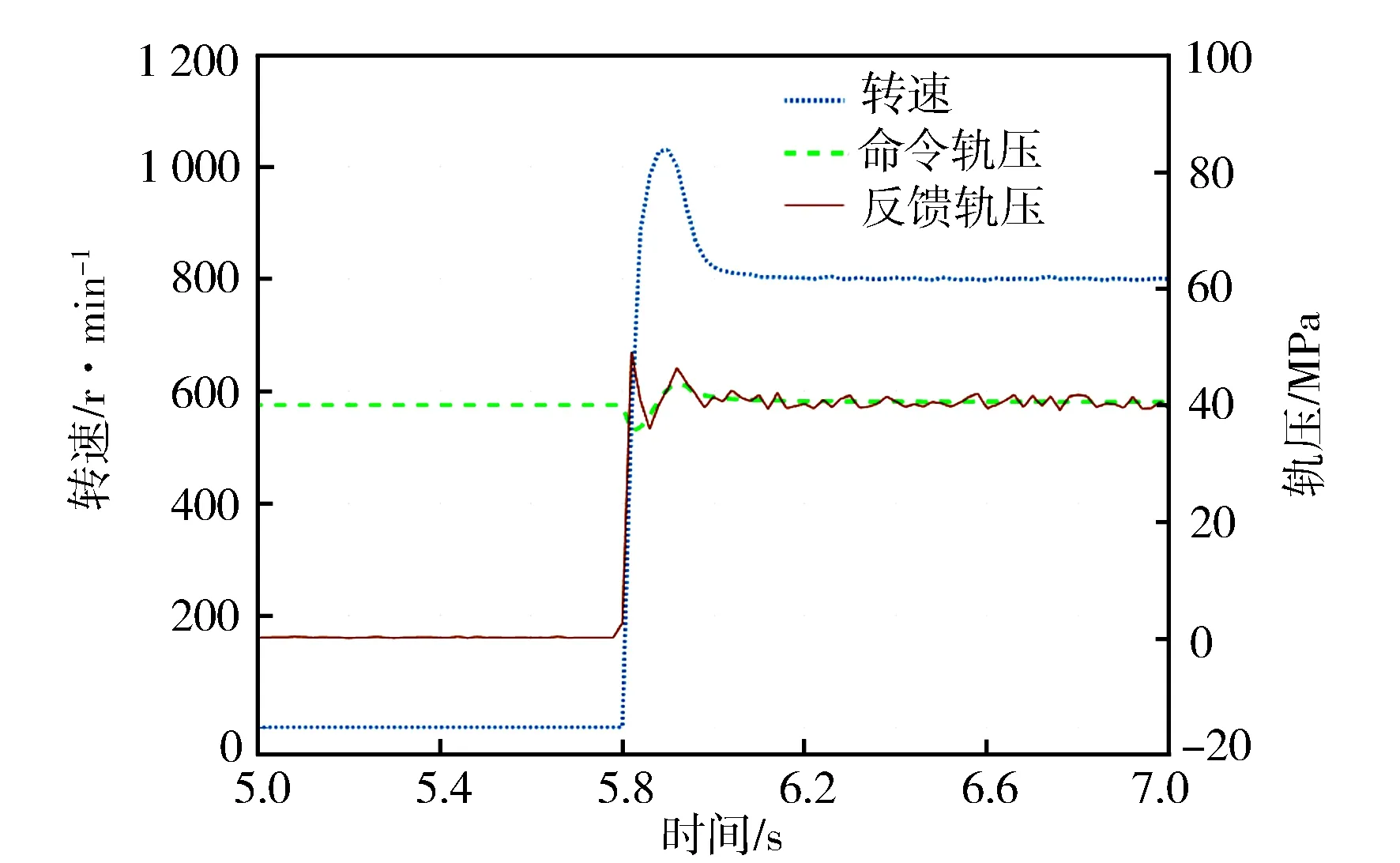
圖9 起動工況軌壓變化曲線
由圖10和圖11可知,在怠速工況和額定轉速工況下,軌壓反饋值圍繞命令軌壓有微小的波動,軌壓偏差在±2 MPa以內。這是因為IMV閥在工作過程對軌壓反饋造成擾動。
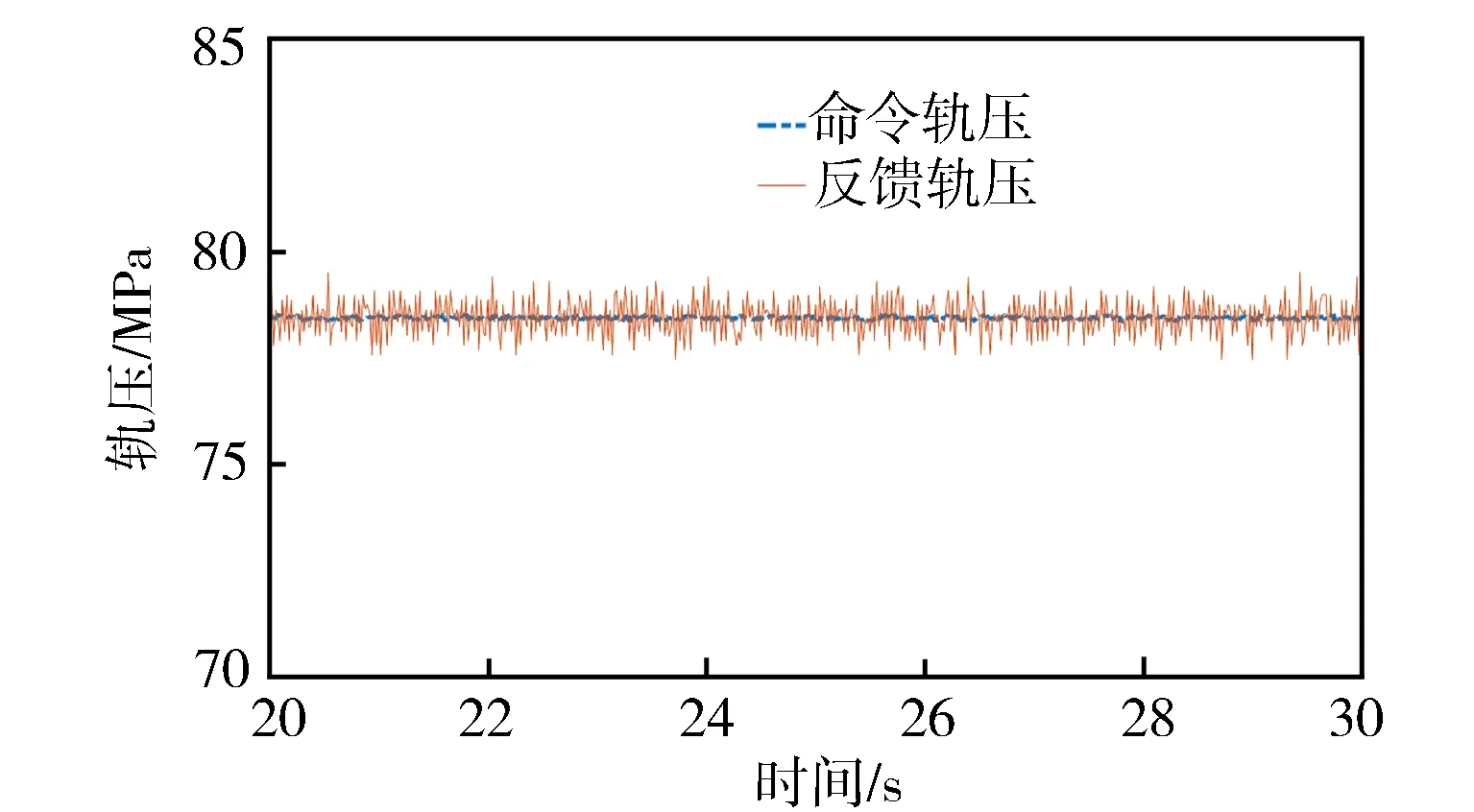
圖10 怠速工況軌壓變化曲線
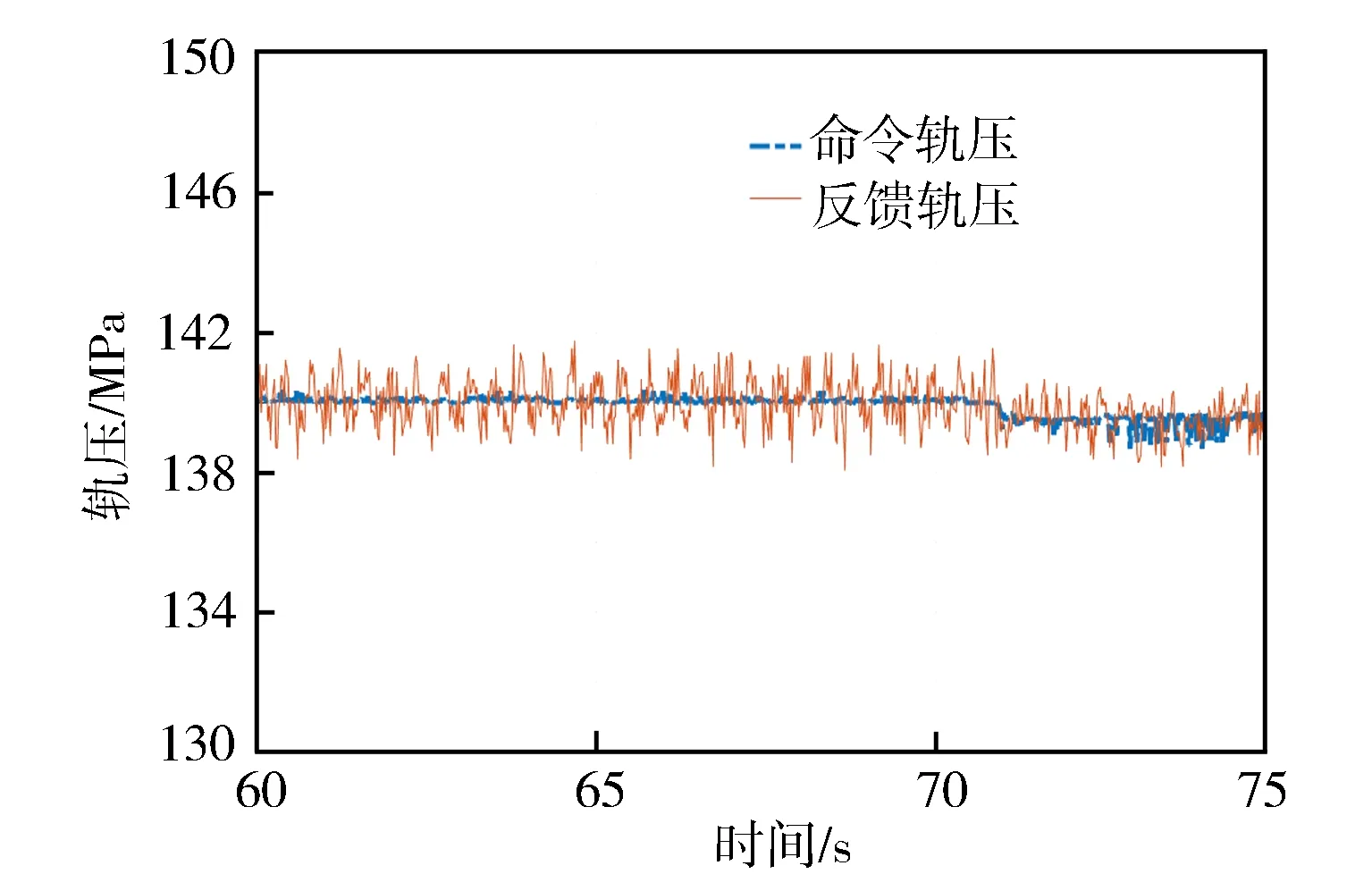
圖11 標定轉速工況軌壓變化曲線
圖12示出發動機轉速從1 650 r/min加速到2 500 r/min過程中軌壓變化趨勢圖。在發動機轉速上升過程中,命令軌壓從80 MPa上升到140 MPa,反饋軌壓能夠動態地跟隨命令軌壓變化,軌壓偏差控制在±3 MPa,且無軌壓超調現象。在命令軌壓連續動態變化過程中,該算法響應迅速,滿足發動機控制運行需求,反饋軌壓能夠較好地動態響應命令軌壓值。
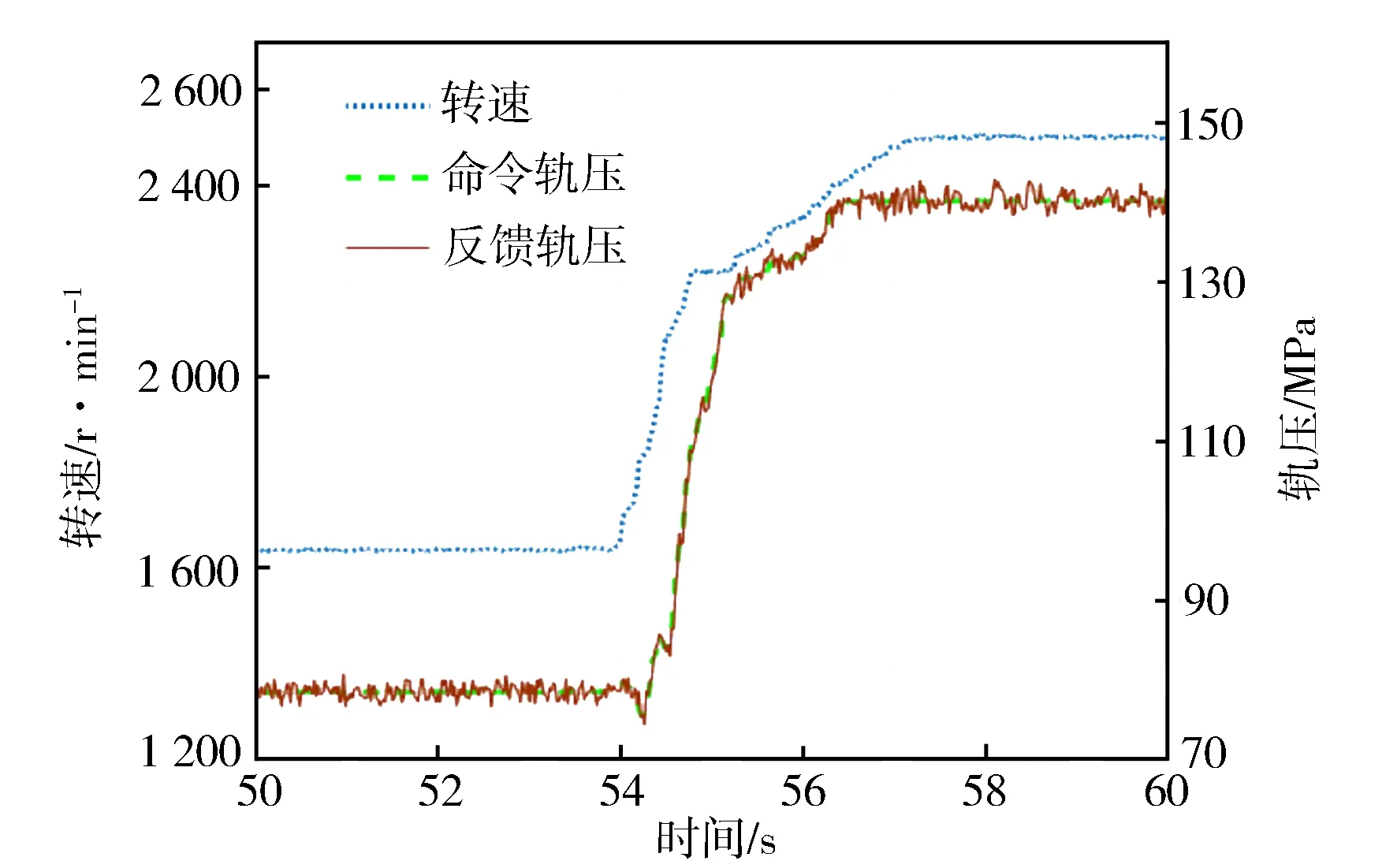
圖12 加速過程中軌壓變化曲線
4 結束語
設計了一種動態分級系數的PID軌壓控制算法,與傳統PID軌壓控制算法相比進行了多項改進,包括軌壓信號采集、前饋補償環節、微分分離環節、動態PID控制系數計算和油量計量閥驅動引入蓄電池電壓修正等。最后將該算法通過發動機臺架進行起動、怠速、標定轉速和加速等工況驗證,試驗結果表明:在起動穩態工況下,軌壓偏差值不大于±2 MPa,在動態過程中,軌壓偏差不大于±3 MPa。該軌壓控制算法可以滿足柴油機復雜多變工況的控制需求,在命令軌壓動態變化過程和連續瞬態變化過程中可以實現較好的軌壓控制,具備快速響應性和較好跟隨性。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15
