極區(qū)間接格網框架慣性基組合導航算法
2021-01-05 10:57:14宋麗君趙萬良楊鵬翔楊光喬
導航定位學報 2020年6期
宋麗君,周 蕾,趙萬良,楊鵬翔,楊光喬
(1.西安建筑科技大學 信息與控制工程學院,西安 710055;2.上海航天控制技術研究所,上海 201109;3.西安現代控制技術研究所,西安 710065)
0 引言
對極區(qū)的探索認知、開發(fā)保護和利用,是科技大國邁向科技強國的標志,是掌握全球科學發(fā)展話語權的必然。
從20 世紀90 年代起,中國就已經開始實質性地參與到北極事務的處理中。為推進科技與經濟的發(fā)展,我國已經廣泛地參與到各類北極活動中,如今我國已成為北極科學活動的大國。雖然與俄羅斯、美國、加拿大、丹麥、挪威等近北極區(qū)國家相比,我國在北極航線與北極地區(qū)方面的地緣優(yōu)勢并不顯著,但是我國北部疆域接近極區(qū),邊界政治、地理環(huán)境復雜,常有局部騷擾,巡航與空天防衛(wèi)亟待增強。而且隨著我國不斷向科技強國之路邁進,軍事實力不斷增強,以及我國最北端高緯度邊疆的國防需求增大,越來越迫切需要增加我國在極區(qū)資源開發(fā)中的話語權,北極航線的開通,勢必會對我國東北地區(qū)的經濟振興和軍事安全產生極大的影響[1]。
2018 年1 月26 日,國務院新聞辦公室發(fā)表我國第1 部北極政策白皮書《中國的北極政策》。白皮書指出:中國是陸上最接近北極圈的國家之一,地緣上是“近北極國家”,并從北極的形勢與變化、中國與北極的關系、中國北極政策目標和基本原則、中國參與北極事務的主要政策主張等4 個方面進行了闡述。
文獻[2]指出,由于北極2 個大國俄羅斯與加拿大,已明確提出2 國在法律上對北極航道的內水主權的確屬權,而其他國家只具有無害通過權,導致北極航道法律權屬問題一直存在爭議,未得到解決;文獻[3]提議,我國政府應充分利用北極理事會正式觀察員國的身份,主動積極加入到北極地區(qū)國際立法工作中,推進與環(huán)北極國家的法律協調工作,以保障我國北極航道的順利通行;文獻[4]針對北極航道全年開通后,會對世界地緣戰(zhàn)略格局帶來影響,以及我國所面臨的機遇與挑戰(zhàn),中肯地提出了應對措施;此外,文獻[5]通過對國外地緣政治理論的詳細評述,預設了多種北極航線地緣政治理論,構建適用于我國國情的地緣政治理論體系,并盡可能維護我國在北極戰(zhàn)略中的權益,且在文中籌劃出多種地緣政治策略,以便我國在處理北極航線爭端時參考或實施。
本文通過廣泛調研,認真聽取國內各慣性導航系統(tǒng)研制單位和機載慣導系統(tǒng)權威研制單位的應用需求和建議,總結得出極區(qū)導航是我國從航空大國向航空強國邁進的1 個基礎性技術瓶頸,更是打通極區(qū)空中走廊安全通道的關鍵技術基礎。
1 極區(qū)導航現存問題
極區(qū)及其周邊和我國北部邊疆近極區(qū)領域存在“兩高兩低三復雜”的特殊情況,使得現有的多種導航設備,在極區(qū)考察活動中的可靠性和安全性難以保障,慣性導航系統(tǒng)精度常隨緯度和高程的變化而變化,變化范圍為6%~10%,尤其是在極區(qū)使用非極區(qū)導航方法時,已不能滿足極區(qū)導航的性能要求。非極區(qū)導航系統(tǒng)在執(zhí)行極區(qū)導航任務時,主要存在以下2 個問題:
1)常規(guī)非極區(qū)導航參數表達方式,在極區(qū)導航中失去意義。尤其在北極點,所有的方向都是南向,這為極區(qū)領航帶來方位上的困擾。
2)現有的非極區(qū)導航設備無法滿足極區(qū)全天候導航要求。在北極地區(qū),由于受地球磁場分布及極區(qū)特殊的天文和氣象條件的影響,飛行過程中的通信和導航性能與中低緯度常規(guī)情況有很大的差別,使得非極區(qū)導航設備,在極區(qū)無法正常工作。
面對錯綜復雜的極區(qū)航行環(huán)境,尋求安全有效的極區(qū)導航方式,是極區(qū)活動迫切需要解決的問題。雖然極區(qū)導航的首選導航設備為慣性導航系統(tǒng),但慣性導航系統(tǒng)本身具有一定的局限性,即誤差會隨時間積累;所以僅僅依靠慣性導航系統(tǒng)很難完成載機高精度、長航時的飛行任務。因此,載機在飛越極區(qū)時,亟待引入外部參考信息與慣性導航系統(tǒng)進行組合導航,通過多傳感器信息的采集進行導航數據的融合修正,以達到提高極區(qū)導航精度的目的。
2 極區(qū)慣性/衛(wèi)星導航/天文組合導航算法
2.1 慣性/衛(wèi)星導航/天文組合導航原理
慣性/衛(wèi)星導航/天文組合導航系統(tǒng)是以捷聯慣性導航系統(tǒng)(strapdown inertial navigation system,SINS)為公共參考系統(tǒng),全球衛(wèi)星導航系統(tǒng)(global navigation satellite system, GNSS)和天文導航系統(tǒng)(celestial navigation system, CNS)分別與SINS 兩兩組合,組合后的信息采用2 個獨立子濾波器處理,然后將子濾波器輸出的導航信息,在主濾波器中進行導航信息智能融合,以獲得SINS/GNSS/CNS 組合導航系統(tǒng)誤差最優(yōu)估計值,并利用該誤差最優(yōu)估計值實時對SINS 進行誤差修正,來提高組合導航系統(tǒng)的精度[6-7]。 基于間接格網框架的極區(qū)SINS/GNSS/CNS 組合導航系統(tǒng)技術如圖1 所示。
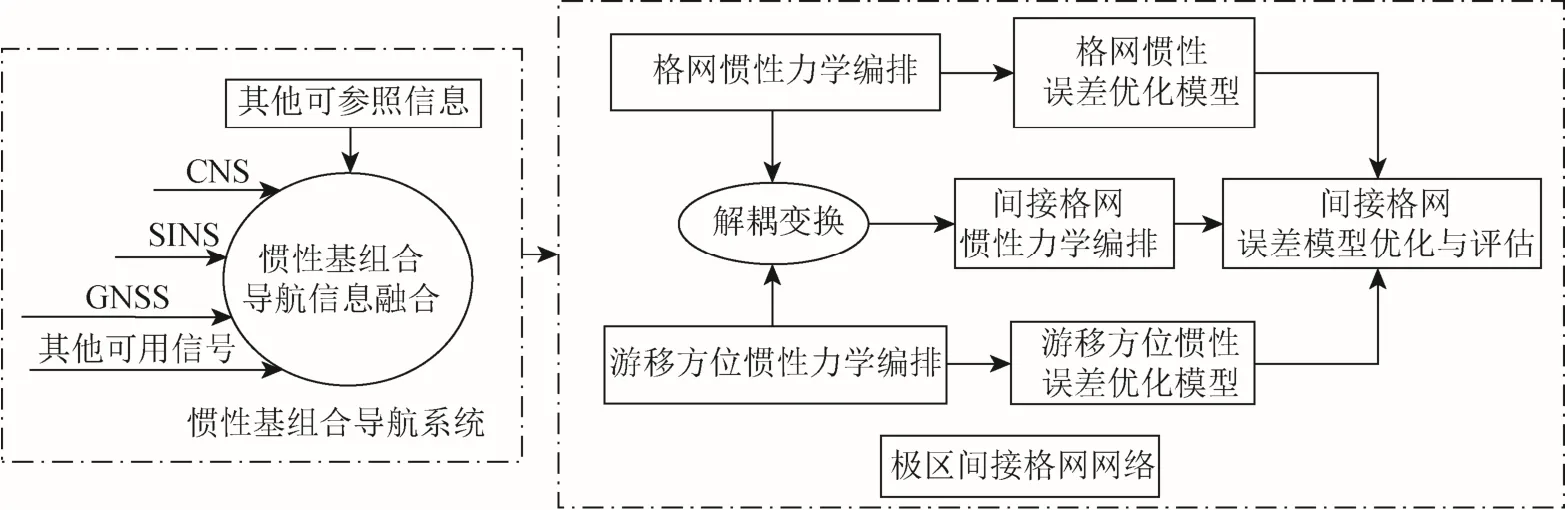
圖1 極區(qū)慣性基組合導航系統(tǒng)技術示意
2.2 間接格網慣性導航力學編排
格網導航以避免航向參考線在極點處收斂為目的,所有經線在極區(qū)航圖是平行于格林威治子午線繪制,載機方位也是相對格林威治子午線及其平行線來定義。但是格網導航力學編排在赤道附近無法正常工作,當載機執(zhí)行全球飛行任務時,需要在赤道附近采用其他的力學編排方案,這樣不同的導航力學編排切換過程中會存在振蕩現象[8-9]。為解決多種力學編排切換過程存在的振蕩問題,本文提出游移方位慣性力學編排和格網慣性力學編排相結合的間接格網慣性導航力學編排。
2.2.1 真北與格網北之間的夾角
設真北方向與格網北向夾角為σ ,機體所處P點的格網坐標系是水平坐標系,設其地理緯度為L、經度為λ、高度為h[10-11]。繞格網天向旋轉,可得格網坐標系(G)與地理坐標系(g)之間的轉換矩陣為:
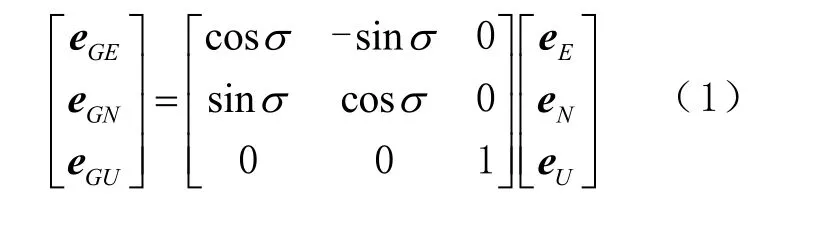
即

式中,( eE, eN, eU)為當地地理坐標系單位向量。
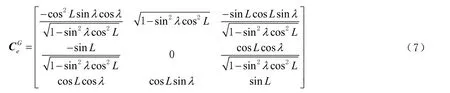
由此可得地心地固坐標系(Earth-centered Earth-fixed, ECEF)與格網坐標系的轉換為:


記格網坐標系單位向量為 (eGE, eGN, eGU),地心地固坐標系單位向量為( eX,eY, eZ),由格網北與真北夾角的定義可知,向量 eGN和 eY相互垂直,因此滿足內積為零的關系,即


2.2.2 游移方位慣性力學編排與格網慣性力學編排解耦變換
為解決多種力學編排切換過程存在振蕩的問題,構建游移方位慣性力學編排和格網慣性力學編排相結合的間接格網慣性導航力學編排。在中低緯度地區(qū),通過游移坐標系和地理坐標系間的關系,將游移方位慣性力學編排的方位和速度投影到地理坐標系;在極區(qū),通過游移坐標系和格網坐標系間的關系,將游移方位慣性力學編排的速度和方位投影到格網坐標系。投影可以采用2 條獨立的導航通道:一路導航通道執(zhí)行游移方位慣性力學編排,在非極區(qū)輸出相關的導航參數,在極區(qū)不輸出導航信息;另一路導航通道僅在極區(qū)時執(zhí)行格網慣性力學編排,并在此通道進行游移方位慣性力學編排和格網慣性力學編排的解耦變換,如圖2 所示。

圖2 游移方位慣性力學編排與格網慣性力學編排解耦變換
1)姿態(tài)更新。

導航坐標系為格網坐標系,假設載機姿態(tài)速率為ωGb(機體坐標系b 相對導航坐標系G 的角速度),由導航坐標系向機體坐標系保持直角坐標系旋轉,可得
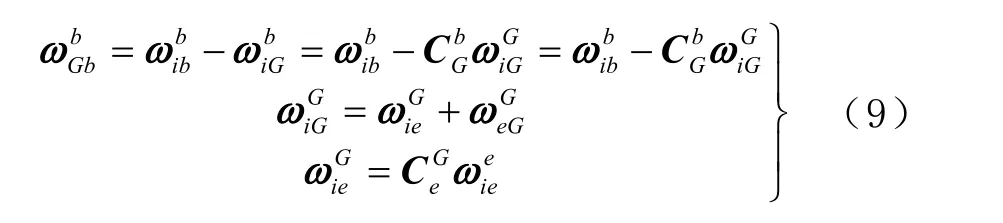
整理可得

因機體所處P 點的格網坐標系是水平坐標系,因此由地理導航坐標系內的可得的水平分量式中( eE, eN, eU)為當地地理坐標系單位向量。
RMh、RNh分別為參考橢球子午圈和卯酉圈上的曲率半徑。



2)速度更新。由載體在導航系內的比力方程,可類推出格網導航坐標系下的比力方程為

3)位置更新。中低緯度位置求解通過位置方向余弦矩陣微分方程的數值積分獲得經緯高定位信息,高緯度地區(qū)采用ECEF 坐標表示載機的實時位置為

根據非極區(qū)時的游移通道導航信息判斷載機是否進入極區(qū),若進入極區(qū)則游移導航通道的導航信息不再輸出,極區(qū)格網導航通道開始工作并輸出相關的導航信息;根據極區(qū)格網導航通道信息判斷載機是否退出極區(qū),若載機退出極區(qū),格網導航通道停止工作,游移導航通道的導航信息繼續(xù)輸出。間接格網慣性導航力學編排可以避免正常導航模式和極區(qū)導航模式切換引入的導航誤差,實現高緯度地區(qū)和中低緯度地區(qū)在導航解算算法中內核統(tǒng)一,導航參數計算外在形式統(tǒng)一。
2.3 極區(qū)SINS/GNSS/CNS 組合導航系統(tǒng)信息融合
針對極區(qū)SINS/GNSS/CNS 組合導航系統(tǒng)的特點,對分散式聯邦濾波算法信息分配原則進行分析對比,以SINS 作為主系統(tǒng)進行導航參數輸出,CNS 的姿態(tài)信息、GNSS 的位置及速度信息作為輔助信息,以校正SINS 的各種參數。
在SINS/GNSS/CNS 組合導航系統(tǒng)中,采用無重置聯邦卡爾曼濾波結構。各子濾波器的設計見參考文獻[12-13],設SINS/GNSS 組合導航系統(tǒng)的公共狀態(tài)局部最優(yōu)估計值為 XGNSS,估計均方差為 PGNSS;SINS/CNS 組合導航系統(tǒng)的公共狀態(tài)局部最優(yōu)估計值為XCNS,估計均方差為 PCNS。依據無重置聯邦濾波器的全局信息融合算法理論,可得SINS/GNSS/CNS 組合導航系統(tǒng)公共狀態(tài)(SINS 誤差狀態(tài))的全局最優(yōu)估計值 ?X 及估計均方差P 為

在得到SINS 誤差狀態(tài)的全局最優(yōu)估計值 ?X后,需要對SINS 進行實時系統(tǒng)誤差校正,并將經過系統(tǒng)誤差校正的SINS 的輸出作為SINS/GNSS/CNS 組合導航系統(tǒng)的輸出。
3 極區(qū)SINS/GNSS/CNS 組合導航系統(tǒng)算法仿真實驗與結果分析
在間接格網導航框架下建立SINS/CNS/GNSS組合導航的狀態(tài)空間模型和量測模型,采用實物與仿真相結合的方式[14-15],用以驗證基于間接格網框架的極區(qū)慣性基組合導航算法的有效性,解決中低緯度地區(qū)極區(qū)導航算法的系統(tǒng)實驗驗證問題。極區(qū)慣性導航仿真器如圖3 所示。

圖3 極區(qū)慣性導航仿真器
在極區(qū)SINS/GNSS/CNS 組合導航系統(tǒng)仿真中,設置為穿越極點飛行8 h,SINS 解算周期為20 ms,GNSS 和CNS 的數據更新周期均為1 s。設捷聯慣導系統(tǒng)初始水平對準誤差為5′,方位對準誤差為10′;初始速度誤差為0.1 m/s,初始位置誤差為30 m;陀 螺 儀 常 值 漂 移 為 0.01(°)/h, 隨 機 游 走 為0.001(°)·h-0.5;加速度計常值誤差為5 ×10-5g,其中g 為西安當地重力加速度,大小為 g=9.794 4 m/s2,隨機游走為 g × 10-5s-0.5;GNSS 的定位精度為25 m,測速誤差為0.1 m/s。電荷耦合器件(charge-coupled device, CCD)星敏感器沿3 個軸方向的測量精度均為10〞,其沿載體x、y、z 3 個軸上的安裝誤差分別為1′、1′、1.5′。仿真結果如下圖4 所示。
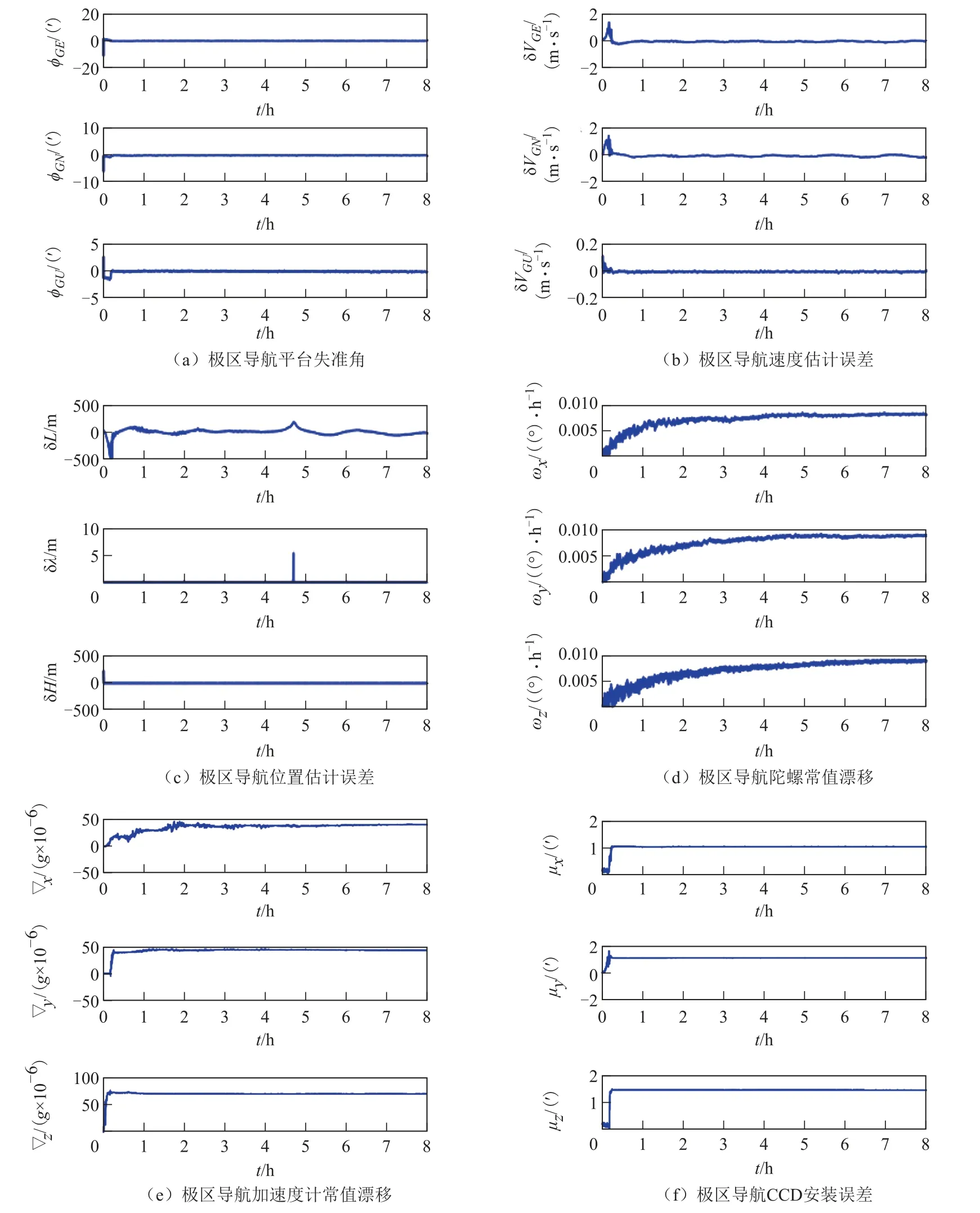
圖4 極區(qū)導航誤差估計
由圖4(f)可知,仿真軌跡設置中0~605 s 載機處于靜止狀態(tài)時,星跟蹤器的安裝誤差不可估計,635~750 s 載機做爬升機動后,y 和z 向安裝誤差角迅速收斂,800~830 s 載機做右轉彎機動,x 向安裝誤差角也迅速收斂。
與此對應,平臺失準角圖4(a)在載機靜止階段不可估計,該階段的失準角誤差取決于星跟蹤器的安裝誤差角大小,當安裝誤差角估計收斂后,失準角也收斂,收斂誤差小于1′。
靜止階段的速度誤差圖4(b)和位置誤差圖4(c)較大,失準角收斂后速度和位置誤差也呈舒拉振蕩形式。隨著極區(qū)導航陀螺常值漂移圖4(d)和極區(qū)導航加速度計零偏圖4(e)逐漸被估計處理,組合導航系統(tǒng)的位置和速度誤差的幅值將會逐漸減小。
4 結束語
針對極區(qū)“兩高兩低三復雜”的特殊地理環(huán)境導致載機飛越極區(qū)時定位定向困難,易失靈迷航,單獨使用導航系統(tǒng)無法滿足載機全球長航時自主飛行導航的精度要求的問題,本文以慣性導航技術為基礎,采用多信息融合輔助協同導航,對飛越極區(qū)慣性基組合導航系統(tǒng)進行分析推演,形成基于間接格網框架的慣性基組合導航系統(tǒng),并以相關背景工程型號為平臺進行半實物仿真驗證評估。從仿真結果整體上看,極區(qū)SINS/GNSS/CNS 組合方案同低緯度地區(qū)SINS/GNSS/CNS 組合方案的導航精度一致。后續(xù)可以對極區(qū)機載慣性基組合導航系統(tǒng)模型進行優(yōu)化提升,并對其導航精度進行評估,為極區(qū)載機慣性基組合導航提供工程應用技術支撐,保證載機飛越極區(qū)的安全性和可靠性,確保我國在極區(qū)探索保護、開發(fā)利用的話語權。
