UWB 測距室內定位算法誤差分析
2021-01-05 10:57:38繆相林
導航定位學報 2020年6期
張 媛,繆相林,王 梅,丁 凰
(1.西安交通大學 城市學院,西安 710018;2.西安交通大學 計算機科學與技術學院,西安 710049)
0 引言
如今,室外定位系統已經發展的非常成熟,如美國的全球定位系統(global position system, GPS)[1]、我國的北斗衛星導航系統(BeiDou navigation satellite system, BDS)以及歐盟的伽利略衛星導航系統(Galileo satellite navigation system, GSNS)。這些定位系統在室外具有較準確的定位性能,但是它們在室內環境下,則無法完成定位。而現今,室內定位已成為傳感網絡的最主要的議題[2-4]。
為了提高室內定位精度,研究人員提出了一些局部定位系統(local positioning system, LPS)。例如:文獻[5]將無線保真(wireless fidelity, WiFi)定位技術應用到復雜的室內環境中;文獻[6-7]采用射頻識別(radio frequency identification, RFID)標簽進行室內定位。盡管基于WiFi 和RFID 的LPS技術已經在室內環境中廣泛使用,但是它們只能提供米級的定位精度。
為了獲取更高的定位精度,研究人員把目光投向超寬帶(ultra wide band, UWB)技術。例如,文獻[8]利用UWB 技術跟蹤室內環境的目標。UWB信號頻帶寬范圍為3.1~10.6 GHz,寬的頻帶性能使其具有極窄的脈沖,時間分辨率高,穿透性強,適合室內環境定位。此外,相比于其他技術,UWB 技術的功耗也小。
目前,研究人員針對UWB 定位系統,提出了不同的定位算法。例如:文獻[9]提出了融合UWB測距信息的室外高精度定位算法,根據車輛行駛航跡,并結合UWB 測距信息估計車輛位置。文獻[10]提出了改進雙向測距到達時間差定位算法的超寬帶定位系統,利用雙向測距并通過線性處理,提高定位精度。通常,基于UWB 定位算法,首先利用UWB 測距,然后再利用這些測距值,并結合定位算法估計節點位置。這些算法包括線性最小均方誤差估計(linearized least square estimation,LLSE)、指紋估計(finger print estimation, FPE)、加權質心估計(weighted centroid estimation, WCE)等。
這些定位算法的定位特性存在差異,在不同的環境下,定位性能并不相同。為此,本文在考慮視距(lineof-sight, LOS)和非視距(non-line-of-sight, NLOS)場景下,對LLSE、FPE 和WCE 的定位算法的特性(包括定位精度和算法的復雜度)進行分析計算。
1 基于UWB 的定位模型
圖1 為基于UWB 的室內定位模型。將錨節點(reference node, RN)部署在已知坐標值的固定位置上,測量RN 的信號到達盲節點(blind node, BN)的時間(time of arrival, TOA),并用測距方程將TOA 轉化為距離。然后將距離信息作為定位算法(LLSE、FPE 和WCE)的輸入,最終得到盲節點位置的估計值。
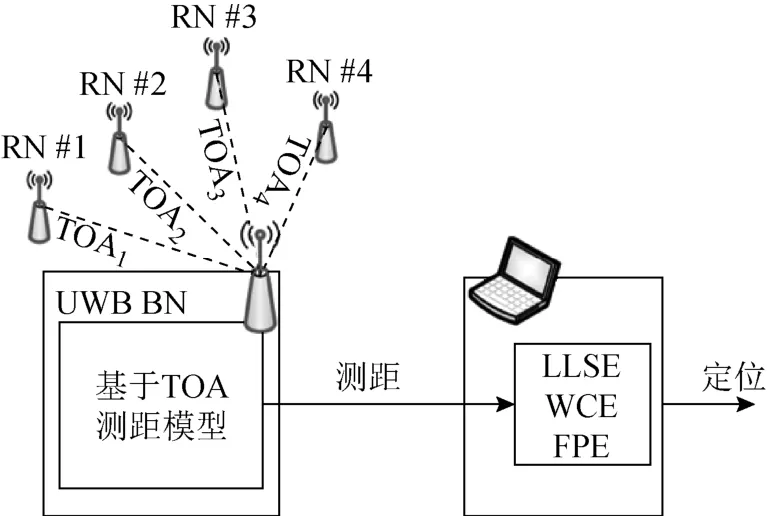
圖1 基于UWB 的定位模型
2 定位算法
2.1 線性最小均方誤差估計(LLSE)算法
LLSE 屬于UWB 室內定位算法中最簡單的1 種。通過最小化觀測數據間的均方誤差[11]來估計節點位置。令 di為盲節點離第i 個錨節點間的距離[12],其定義為

式中: p =( xp,yp)為標簽位置;pi=( xi,yi)為第i 個錨節點位置。對式(1)進行平方、簡化處理后可得

若有N 個錨節點,即 i =1, 2,… , N,可建立N 個等式。例如,第N 個等式為

將式(2)與式(3)相減可得

將N-1 個等式減去第N 個等式,再以矩形形式表述為

式中:b 為( N- 1) ×1維矩陣; p 為 2 ×1維矩陣;A為(N- 1)×2 維矩陣,它們的定義為
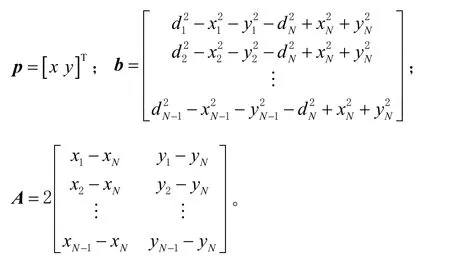

若A 不是方矩陣,就利用偽逆矩陣估計節點位置[13]為

2.2 加權質心估計(WCE)算法
WCE 的算法先估計盲節點到錨節點的距離d,再依據這些錨節點位置和距離估計盲節點位置。
具體而言,令( x1,y1),( x2, y2),…,( xN, yN)表示這N 個錨節點的位置,1d , d2,…,dN表示這些錨節點離盲節點的距離,則盲節點的位置坐標(x,y)為
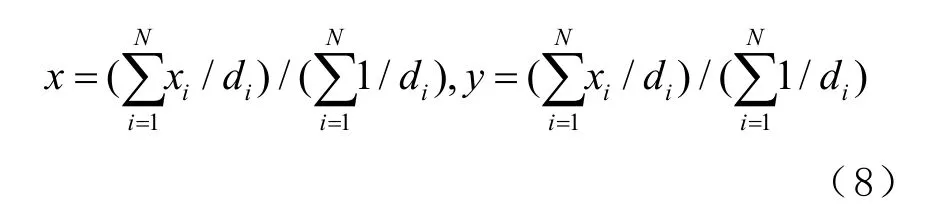
式中:i 表示錨節點的索引號;ix 表示第i 個錨節點的橫坐標;yi表示第i 個錨節點的縱坐標。
盲節點根據距離遠近選出與其最近的4 個錨節點,再利用這4 個錨節點位置即可出估計盲節點的位置。
2.3 指紋估計(FPE)算法
FPE 算法是基于UWB 測距的室內定位最常用的算法。先構建錨節點與盲節點間距離的指紋匹配圖,然后計算當前距離,進而估計盲節點的位置。
具體而言,FPE 算法可分為離線采集和在線匹配2 個階段,如圖2 所示。
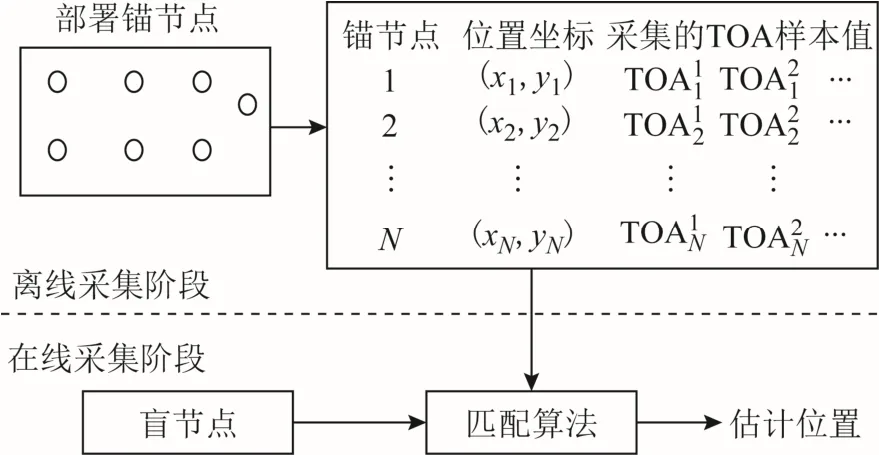
圖2 指紋估計模型
在離線采集階段,部署錨節點,并獲取錨節點在各點位置的TOA 值,即將每個位置坐標信息和相應的TOA 值構成1 條信息鏈,形成1 條指紋。在在線匹配階段,估計盲節點所接收的TOA 值,再與數據庫里的指紋進行匹配,找到匹配度最高的位置作為盲節點位置。
令 fj表示存儲在數據庫的距離測量值,其定義為
式中M 為測量次數。
假定盲節點離錨節點的距離矢量為

再將 fj與d 進行比較,并將具有最小距離的位置點作為盲節點位置,即

盲節點位置的估計值為

3 性能分析
為了更好地分析LLSE、WCE 和FPE 算法的性能,利用矩陣實驗室(MATLAB)R2016a 軟件建立仿真平臺。考慮LOS 和NLOS 2 個場景。在2 維 100 m× 120 m 仿真區域內部署5 個錨節點和10 個盲節點,且以隨機方式部署這些盲節點。10 個盲節點的真實位置如表1 所示。
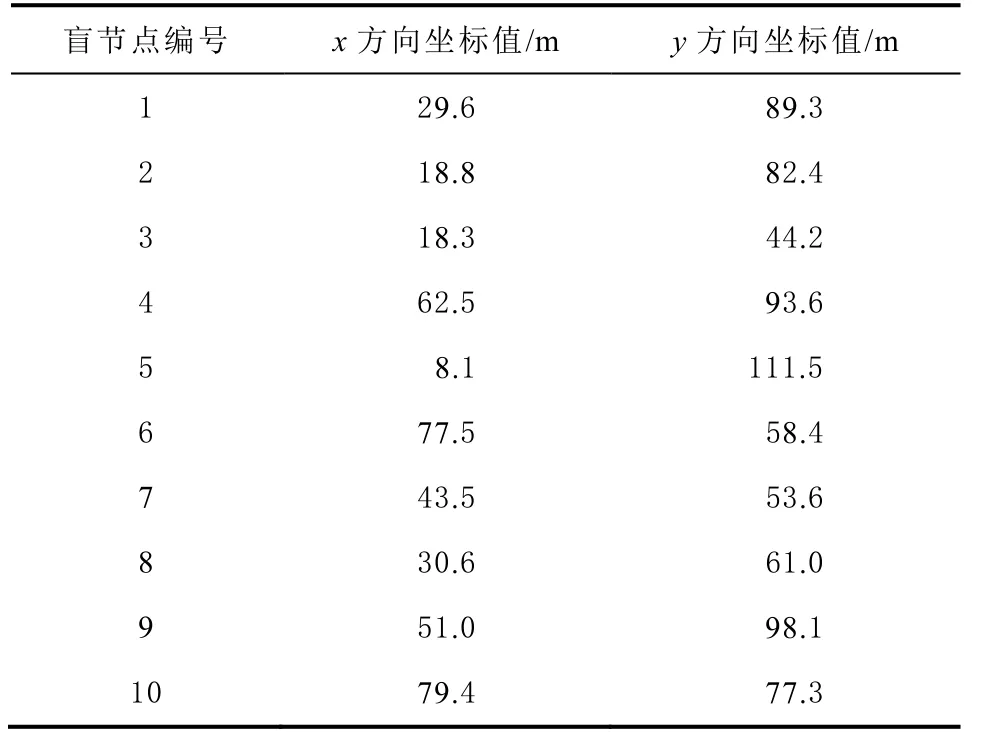
表1 10 個盲節點的真實位置
先利用圖1 流程建立模型測距,再利用LLSE、WCE 和FPE 算法估計盲節點位置。此外,在以下仿真圖中:實黑圓點表示錨節點位置;三角形表示盲節點的真實位置;空心圓點表示算法估計的盲節點位置。
3.1 LOS 場景
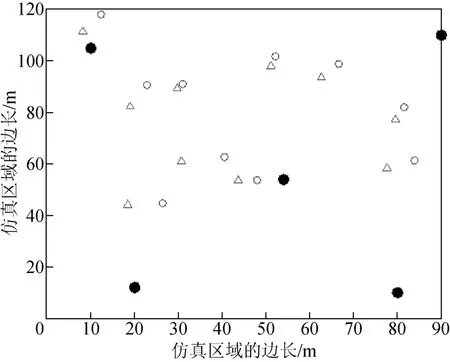
圖3 LLSE 算法對盲節點的位置估計(LOS 場景)
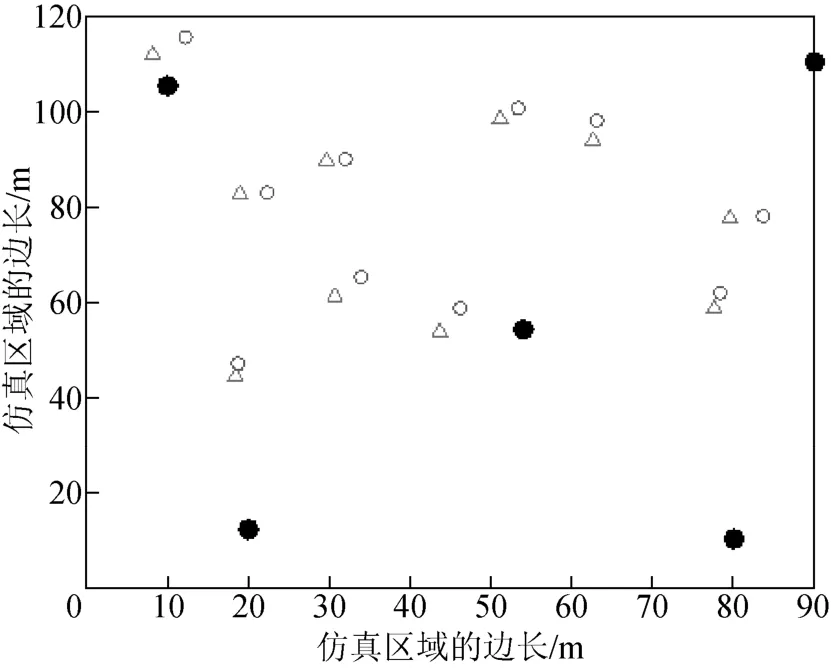
圖4 WCE 算法對盲節點的位置估計(LOS 場景)
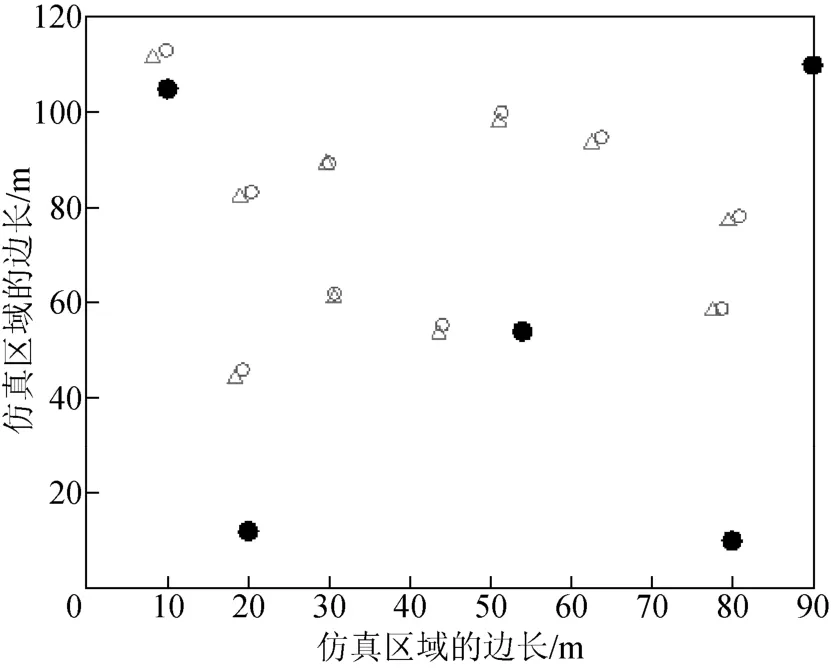
圖5 FPE 算法對盲節點的位置估計(LOS 場景)
圖3 ~圖5 分別顯示了LLSE、WCE 和FPE 算法對盲節點的位置估計,圖中的橫、縱坐標分別表示2 維區域長和寬。
從圖3~圖5 可知:相比于LLSE 和WCE,FPE算法能夠準確估計盲節點的位置;LLSE 算法的估計誤差最大;FPE 算法的均方誤差為0.657 4 m;LLSE 算法和WCE 算法的均方誤差分別為0.871 2 和0.723 4 m。
表2 為3 種算法的定位精度及復雜度程度。從表2 可以看出,FPE 算法的運行時間最多,這也說明FPE 算法的復雜度高,是以高的復雜度換取高的定位精度。
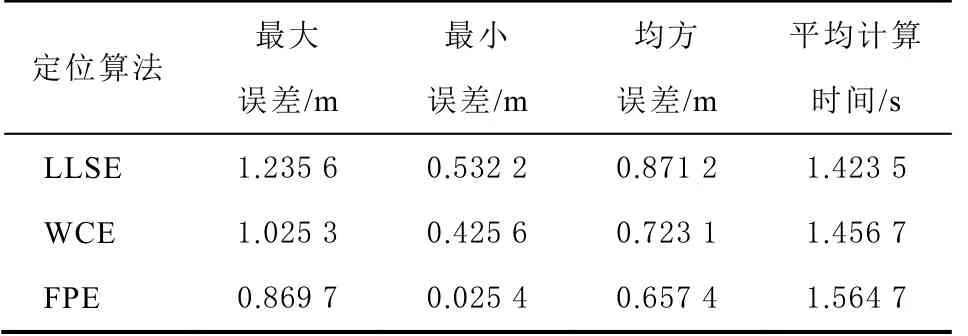
表2 LLSE、WCE 和FPE 算法的定位及復雜度性能(LOS 場景)
3.2 NLOS 場景
本小節分析3 個定位算法在NLOS 場景中的定位特性。圖6~圖8 顯示了LLSE、WCE 和FPE算法的定位特性。
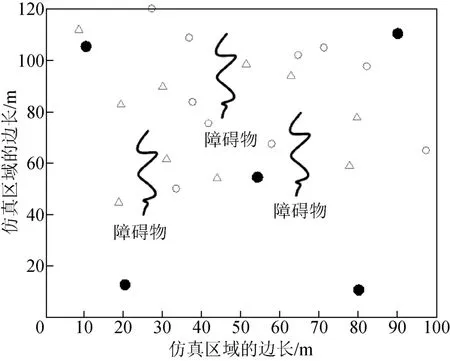
圖6 LLSE 算法對盲節點的位置估計(NLOS 場景)
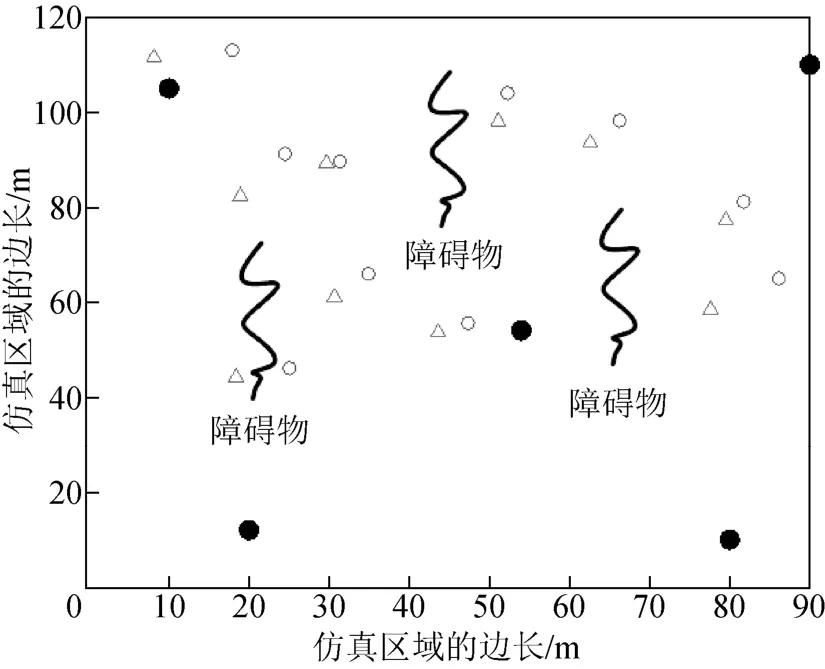
圖7 WCE 算法對盲節點的位置估計(NLOS 場景)
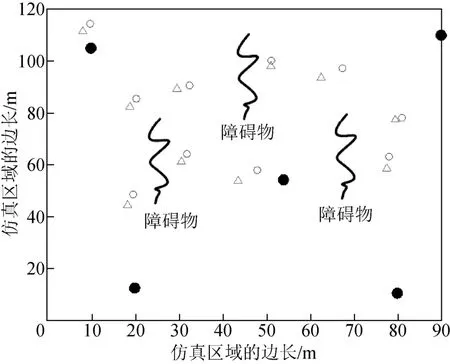
圖8 FPE 算法對盲節點的位置估計(NLOS 場景)
正如預期的那樣,相比于LOS 場景,NLOS 場景下的定位精度下降。原因在于:NLOS 場景中的障礙物阻礙了信號傳輸,擾動了對信號的TOA 測量,加大了測距誤差,最終降低了定位精度。此外,相比于LLSE 和WCE 算法,FPE 算法仍具有高的定位精度。
表3 表示了3 個算法在NLOS 場景下的定位精度及運算時間。對比表2 和表3 內數據可知,NLOS 場景下的定位誤差較差,例如,LLSE 算法在LOS 場景下的均方誤差為0.871 2 m,而在NLOS 場景下的均方誤差達到1.230 3 m。但各算法在LOS 和NLOS 2 個場景下運算時間并沒有多大變化。

表3 LLSE、WCE 和FPE 算法的定位及復雜度特性(LOS 場景)
4 結束語
本文針對基于UWB 測距的室內定位算法進行分析,分析了在NLOS 和LOS 2 個場景下,LLSE、WCE 和FPE 算法的均方誤差和復雜度。實驗數據表明,相比于LLSE 和WCE,FPE 算法具有更低的定位誤差,但復雜度較高。此外,NLOS 場景對定位有負面影響。相比于LOS 場景,NLOS 場景下的定位精度有所下降。
