“黑珍珠”波浪滑翔器研發綜述
2021-01-04 09:56:44孫秀軍桑宏強于佩元
海洋科學 2020年12期
孫秀軍, 桑宏強, 李 燦, 周 瑩, 于佩元, 王 雷
“黑珍珠”波浪滑翔器研發綜述
孫秀軍1, 4, 桑宏強2, 李 燦3, 周 瑩3, 于佩元1, 王 雷1
(1. 中國海洋大學 物理海洋教育部重點實驗室, 山東 青島 266100; 2. 天津工業大學 機械工程學院, 天津 300387; 3. 中國海洋大學 海洋高等研究院, 山東 青島 266100; 4. 青島海洋科學與技術試點國家實驗室海洋動力過程與氣候功能實驗室, 山東 青島 266237)
通過講述“黑珍珠”波浪滑翔器的研發進程, 總結了波浪滑翔器團隊長達8年的發展經驗。從國家科技計劃全鏈條資助完成諸項開創式應用、波浪滑翔器型號化/產品化/國產化歷程、團隊多年發展壯大過程中的結構管理形式與知識產權布局等維度講述了波浪滑翔器一類的高端海洋裝備從由機理研究、關鍵技術攻關、樣機研制、技術固化到工程化建設的發展規律。廣大讀者能夠更多了解波浪滑翔器的當前進展、使用價值及在其海洋環境觀測及海上安全保障探測中起到的重要作用。
“黑珍珠”波浪滑翔器; 臺風觀測; 極端海況; 最大航程; 國產化率; 批量化生產
從狹義上講, 波浪滑翔器是美國Liquid Robotics公司研發的Wave Glider的中文翻譯, 代指美國該型由波浪能和太陽能驅動的水面無人船。該無人船可以實現1年10 000 km的長期海上續航而無需人工維護, 搭載海洋學科傳感器可以實現外海大洋海氣界面的實時連續觀測和監測[1]。
從廣義上來講, 波浪滑翔器是指利用波浪動力實現前向驅動的無人自主航行器, 也就是說波浪滑翔器是以波浪動力高效轉換作為關鍵核心技術的無人航行器[2]。波浪滑翔器平臺充分吸收外海大洋的豐富波浪能源并高效轉換為前向動力, 這一波浪動力高效轉換技術解決了無人航行器只能搭載有限的能源和動力這一技術瓶頸, 為無人航行器在理論上的無限期續航創造了可能[3]。
2004年前后, 美國Hine等人在利用聲學方法跟蹤研究駝背鯨的生活習性的過程中發明了波浪滑翔器(Wave Glider)[4]。2007年, Liquid Robotics公司成立并專注波浪滑翔器(Wave Glider)的研發、生產以及應用服務等[5]。
我國“黑珍珠”波浪滑翔器樣機研發開始于2012年, 相比美國晚了近10年時間, 2014年我國國家高技術研究發展計劃對波浪滑翔器的立項加快了“黑珍珠”波浪滑翔器技術的開發進程[6]。
在我國國家高技術研究發展計劃的資助下, “黑珍珠”波浪滑翔器研發團隊經過多年的工藝技術嘗試和數次失敗考驗, 完成了平臺的關鍵技術攻關、工藝技術固化、小批量生產并廣泛應用于我國海洋環境觀測之中。
2018年初,“黑珍珠”技術團隊在攻克波浪滑翔器的波浪動力高效轉換這一關鍵核心技術之后, 將波浪動力轉換技術與自主航行器(Autonomous Underwater Vehicle, AUV)、水面無人船(Unmanned Surface Vehicle, USV)以及水下滑翔機(Autonomous Underwater Glider, AUG)等平臺進行大膽的技術融合, 完成了新一代波浪滑翔器的開發, 為引領國際波浪滑翔器技術發展前沿奠定了基礎[7-8]。
本文以“黑珍珠”波浪滑翔器的發展經歷為鏈條, 從國家科技計劃全鏈條資助完成諸項開創式應用、波浪滑翔器型號化/產品化/國產化歷程、團隊多年發展壯大過程中的結構管理形式與知識產權布局等維度講述了波浪滑翔器8年的研發歷程。經過30余名技術人員堅守和專注研發, “黑珍珠”波浪滑翔器技術日趨成熟, 并在氣象水文調查、水質生態監測、海洋聲學觀測、衛星遙感驗證等領域得到推廣應用, 成為我國國產化高端海洋裝備知名品牌。10余項國家級和省部級項目資助基本覆蓋了國家科技資助計劃的全鏈條, 8次臺風觀測驗證了平臺在極端海況下的生存能力, 單次最大航時320 d, 航程14 271.4 km表明了其外海大洋常態化觀測的極大潛能, 20余家海洋權威機構的應用詮釋了無人移動平臺在未來海洋觀測中的巨大市場需求, 100余套的批量生產和6次我國市場公開招投標銷售標志著產業化進程的開始。此外, 20余項發明專利、30余篇論文, 95%以上的國產化率以及近10種產品型號系列等體現“黑珍珠”波浪滑翔器技術的核心競爭力。高端海洋裝備研發周期長, 資金投入大, 正所謂“十年磨一劍, 一劍磨十年”。把準方向、團結協作、持之以恒、攻堅克難是專業人員研發高端海洋裝備取得成功的必要條件。
1 國家科技計劃全鏈條資助, 創多項記錄碩果累累
1.1 國家/省部級課題10余項覆蓋國家科技資助計劃全鏈條
自2014年以來,“黑珍珠”波浪滑翔器技術研究課題基本覆蓋了國家科技資助計劃的全鏈條, 依次完成了理論研究、關鍵技術攻關、樣機研制、應用拓展、協作組網以及工程化開發等環節的研究任務[9-10]。
2014年1月,“黑珍珠”波浪滑翔器獲得國家高技術研究發展計劃(863計劃) 深遠海海洋動力環境監測關鍵技術與系統集成重大項目資助, 課題名稱為“混合驅動自主航行監測波浪能滑翔器觀測系統”(課題編號: 2014AA09A507), 國撥經費580萬元。
2014年4月,“黑珍珠”波浪滑翔器獲得天津市科技支撐計劃重點項目資助, 項目名稱為“自主遠洋巡航監測波浪滑翔器系統開發與產品定型” (項目編號: 14ZCZDSF00010), 市財政資助100萬元。
2017年7月, “黑珍珠”波浪滑翔器獲得國家重點研發計劃重點專項項目資助, 項目名稱為“多節點無人無纜潛水器組網作業技術研究及示范系統”, 子課題名稱為“波浪滑翔器改造與協作觀測技術”(課題編號: 2017YFC0305902), 國撥與配套經費合計1 595.5萬元。
2018年4月,“黑珍珠”波浪滑翔器獲得青島海洋科學與技術試點國家實驗室“問海計劃”項目資助, 項目名稱為“波浪滑翔器海氣通量觀測技術開發與應用”(項目編號: 2017WHZZB0101), 國撥專項經費690萬元。
2019年1月,“黑珍珠”波浪滑翔器獲得國家自然科學基金面上項目資助, 項目名稱為“基于流體-多體耦合動力學的波浪滑翔器運動性能研究”(項目編號: 51875540), 國撥經費共計70.24萬元。
2019年11月,“黑珍珠”波浪滑翔器獲得山東省重點研發計劃重大科技創新工程項目資助, 開展波浪滑翔器的生產線建設, 項目名稱為“波浪滑翔器工程化技術研究開發”(項目編號: 2019JZZY020701), 該項目國撥經費350萬元, 青島海舟科技有限公司配套200萬元。
除了以上所列, 自2014年來, “黑珍珠”波浪滑翔器的研制共計獲得國家級和省部級項目資助十余項, 國撥研發經費愈億元。其中, 部分項目和課題正在執行期內, 其余部分業已完成驗收工作。
2017年11月,“黑珍珠”波浪滑翔器通過科技部第三方專家見證的海上試驗驗收, 完成了青島99 d 共計3 600 km的長航程試驗和南海“天鴿”和“帕卡”兩次臺風極端海況測試(經歷最大浪高9.2 m), 實現了氣象參數(風速、風向、氣溫、氣壓、濕度)和水文參數(水溫、鹽度、浪高、浪周期和剖面流速)等參數的測量。
2018年1月,“黑珍珠”波浪滑翔器通過國家高技術研究發展計劃(863計劃)課題驗收。中國21世紀議程管理中心在北京組織召開了“混合驅動自主巡航波浪滑翔器觀測系統”(課題編號: 2014AA09A507) 課題驗收會。驗收專家組聽取了課題組的驗收匯報, 審閱了課題組提交的驗收材料, 一致同意該課題通過驗收。
2018年2月,“黑珍珠”波浪滑翔器通過天津市科技支撐計劃項目驗收。天津市科學技術評價中心在天津組織召開了“自主遠洋巡航監測波浪滑翔器系統開發與產品定型”(項目編號: 14ZCZDSF00010)項目驗收會。驗收專家組聽取了項目組驗收匯報, 審閱了項目組提交的驗收材料, 一致同意該項目通過驗收。
1.2 單次航程航時與累計航程航時均創造國內記錄
“黑珍珠”波浪滑翔器創造了國內單次航程和航時[11]最長(單次最長航時320 d、單次最長航程14 271.4 km), 累計航程和累計航時[12]最長(累計最長航程36 750 km、累計最長航時1 203 d)等諸多記錄。
2019年3月9日,“黑珍珠”波浪滑翔器于西太平洋海域進行長航程、長航時極限測試, 設備布放點為130°E, 24°N。海試試驗區周長約3 000 n mile, 覆蓋面積約為1 200 000 n mile2。2019年3月9日至2020年1月23日波浪滑翔器完成單次累計航時320 d, 單次累計航程為14 271.4 km的壯舉, 成功完成最大航程航時自我突破。
2017年8月17日, “黑珍珠”波浪滑翔器于中國南海海域進行長期波浪與流速實時觀測, 設備布放點為118°E, 22°N。海試試驗區周長約800 n mile, 覆蓋面積約為40 000 n mile2。2017年8月17日至2017年9月3日波浪滑翔器完成單次累計航時26 d, 單次累計航程為356 km, 首次實現長期波浪與流速觀測應用。
2017年5月20日,“黑珍珠”波浪滑翔器于中國青島千里巖附近海域進行長期性能測試, 設備布放點為121°30′E, 36°17′N。海試試驗區周長約40 n mile, 覆蓋面積約為100 n mile2。2017年5月20日至2017年8月30日波浪滑翔器完成單次累計航時99 d, 單次累計航程為3 594 km, 首次完成長期性能測試。
2018年10月10日,“黑珍珠”波浪滑翔器于西太平洋海域進行長航程長航時氣象水文實時觀測, 設備布放點為130°E, 21°N。海試試驗區周長約2 500 n mile, 覆蓋面積約為100 000 n mile2。2018年10月10日至2019年2月21日波浪滑翔器完成單次累計航時131 d, 單次累計航程為8 116 km, 實現長期自主氣象水文觀測應用。
2018年12月22日,“黑珍珠”波浪滑翔器于中國東海海域進行氣象水文實時觀測, 設備布放點為123°35′E, 30°19′N。海試試驗區周長約1 000 n mile, 覆蓋面積約為60 000 n mile2。2018年12月22日至2019年1月30日波浪滑翔器完成單次累計航時38 d, 單次累計航程為2 168 km, 完成東海海域自主氣象水文觀測應用。
2019年5月11日,“黑珍珠”波浪滑翔器于中國南海海域進行虛擬錨泊與路徑折返跟蹤觀測應用, 設備布放點為116°E, 19°20′N。海試試驗區周長約800 n mile, 覆蓋面積約為40 000 n mile2。2019年5月11日至2019年9月16日波浪滑翔器完成單次累計航時125 d, 單次累計航程為4 212.8 km, 完成波浪滑翔器錨泊與路徑折返觀測應用。
2019年8月5日,“黑珍珠”波浪滑翔器于中國南海和菲律賓海域進行路徑跟蹤與實時氣象水文觀測應用, 設備布放點為124°40′E, 19°4′N。海試試驗區周長約2 500 n mile, 覆蓋面積約為100 000 n mile2。2019年8月5日至2019年11月25日波浪滑翔器完成單次累計航時110 d, 單次累計航程為3 884 km, 完成長航程路徑跟蹤觀測應用。
2019年,“黑珍珠”波浪滑翔器進行各類海試共計15次, 全年累計航時1 074 d, 累計航程28 576 km, 驗證了“黑珍珠”波浪滑翔器的各項性能和功能, 進一步提升和驗證了使用可靠性。
1.3 完成我國首次臺風觀測, 唯一具備臺風常態化觀測能力
“黑珍珠”波浪滑翔器作為國內首次也是唯一開展過臺風常態化觀測的波浪滑翔器平臺[13], 在2017年至2020年期間, 完成了8次臺風觀測, 包括2017年的13、14和15號臺風“天鴿”(Hato)、“帕卡”(Pakhar)和“瑪娃”(Mawar), 以及2019年的05、07、11、13和18號臺風“丹娜絲”(Danas)、“韋帕”(Wipha)、“白鹿”(Bailu)、“玲玲”(Lingling )和“米娜”(Mitag)等[14]。如今, 30余人的技術開發隊伍經近8年的優化改進, 完成了從工藝到技術的多次更新迭代, 使“黑珍珠”波浪滑翔器的工作可靠性得以顯著增強[15-16]。
1) 臺風“天鴿”、“帕卡”和“瑪娃”觀測
2017年8月17日晚上7點, “黑珍珠”波浪滑翔器搭載的試驗船從汕頭經濟特區碼頭出發, 行駛大約12 h到達180 km外的目標海域, 進行863計劃驗收單項性能指標試驗, 設備于坐標118°E, 22°N處布放。試驗期間, “黑珍珠”波浪滑翔器先后經歷了第13號臺風“天鴿”, 第14號臺風“帕卡”, 第16號臺風“瑪娃”, 設備于2017年9月3日成功回收。根據設備回傳的氣溫、氣壓、風速、風向數據分析, 臺風“天鴿”、“帕卡”和“瑪娃”經過時最大風速分別為15.248 m/s、16.105 m/s和15.995 m/s, 氣壓也有顯著降低, 符合臺風經過時天氣變化特征。
2) 臺風“丹娜絲”和“韋帕”觀測
2019年5月11號, “黑珍珠”波浪滑翔器于南海東沙群島南側海域進行比測試驗, 設備布放點為116°E, 19°N。此次試驗歷時71 d, 累計航程為2 832 km,先后經歷了第5號臺風“丹娜絲”, 第7號臺風“韋帕”, 成功獲取臺風期間氣象水文數據。臺風“丹娜絲”和“韋帕”經過時的波浪滑翔器測得風速明顯增大, 氣溫、氣壓顯著降低, 符合臺風經過的氣象變化, 回傳的水文氣象數據連續有效, 證明了波浪滑翔器臺風觀測的可行性。
3) 臺風“白鹿”、“玲玲”和“米娜”觀測
2019年8月5日,“黑珍珠”波浪滑翔器搭載科考船到達菲律賓海海區, 并于坐標點124.671 684°E, 19.0618°N處布放。在菲律賓海以及中國南海完成了為期110 d航程3 884 km的連續航行, 期間獲取了“白鹿”、“玲玲”和“米娜”3個臺風期間的氣象水文數據, 并于2019年11月25日在三亞近海成功回收。臺風“白鹿”、“玲玲”和“米娜”經過時的風速明顯增強(16.788 m/s、16.404 5 m/s和14.110 95 m/s),氣壓明顯降低, 并形成顯著降溫區; 波浪滑翔器集成氣象水文傳感器對臺風“白鹿”的觀測效果明顯, 回傳的氣溫、氣壓、風速、風向、SST數據真實有效, 證明波浪滑翔器臺風觀測切實可行。
我國臺風所等單位的權威人士表示,“黑珍珠”波浪滑翔器在以上8次臺風期間所獲取的氣溫、氣壓、風速、風向、海表溫度等數據具有較高的可信度, 能有效地為相關機構開展臺風研究和預警提供可靠的觀測支撐[17]。
1.4 我國首次嘗試且唯一實現多臺組網常態化西太平洋觀測
“黑珍珠”波浪滑翔器作為國內首次也是唯一實現西太平洋多臺組網常態化觀測的波浪滑翔器平臺, 在2018年至今一直開展西太平洋多臺組網常態化觀測, 連續實時記錄了熱帶西太平洋風速、風向、氣溫、氣壓以及海表水溫等數據, 填補我國在外海大洋利用移動平臺進行組網常態化觀測的空白, 為海洋和氣候模式的驗證和改進提供觀測數據支撐[18]。
2018年5月10日上午9點30分,“黑珍珠”波浪滑翔器搭乘“海大號”科考船從薛家島碼頭出發, 行駛大約10天到達目標海域, 并于144°36′E, 32°18′N處布放, 這是“黑珍珠”波浪滑翔器在西北太平洋海域的首次布放, 布放數量2套。設備布放后通過銥星回傳的數據包括AirMar氣象數據、水面溫鹽數據和波浪數據等。
2018年10月5日下午19點34分, “黑珍珠”波浪滑翔器搭乘“科學號”科考船從舟山碼頭出發, 行駛大約5天到達目標海域, 并于130°E, 24°N處布放, 這是“黑珍珠”波浪滑翔器在西北太平洋海域的第二次布放, 布放數量1套。設備布放后通過銥星回傳的數據包括AirMar氣象數據和水面溫鹽數據等。
2019年3月1日上午8點34分, “黑珍珠”波浪滑翔器搭乘“海大號”科考船從嶗山碼頭出發, 行駛大約9天到達目標海域, 并于130°E, 24°N處布放, 這是“黑珍珠”波浪滑翔器在西北太平洋海域的第三次布放, 布放數量1套。設備布放后通過銥星回傳的數據包括AirMar氣象數據和水面溫鹽數據等。
2019年9月4日下午15點12分,“黑珍珠”波浪滑翔器搭乘“東方紅三號”科考船19年秋季航次從嶗山碼頭出發, 行駛大約4天到達目標海域, 并于144°38′E, 32°24′N處布放, 這是“黑珍珠”波浪滑翔器在西北太平洋海域的第四次布放, 布放數量2套。設備布放后通過銥星回傳的數據包括AirMar氣象數據、水面溫鹽數據和波浪數據等。
2019年10月31日下午13點55分,“黑珍珠”波浪滑翔器搭乘“東方紅三號”科考船從嶗山碼頭出發, 行駛大約5天到達目標海域, 并于143°29.12′E, 32°12.20′N處布放, 這是“黑珍珠”波浪滑翔器在西北太平洋海域的第五次布放, 布放數量2套。設備布放后通過銥星回傳的數據包括AirMar氣象數據、水面溫鹽數據和波浪數據等。
自2018年至今,“黑珍珠”團隊通過5個西太平洋航次合計布放波浪滑翔器8套, 分別為2018年5月10日布放了2套, 2018年10月5日布放了1套, 2019年3月1日布放了1套, 2019年9月4日布放了2套, 2019年10月31日布放了2套。“黑珍珠”波浪滑翔器在西太平洋的局部海域一直保持3套以上數量進行編隊常態化觀測[19]。
此外, 根據國家重點研發計劃項目要求,“黑珍珠”波浪滑翔器于2019年在我國南海開展了為期3個月的海上編隊觀測試驗, 驗證了波浪滑翔器編隊與水下滑翔機編隊進行異構組網的功能。
2 國產自控工藝穩定, 市場肯定成就精品
2.1 產品型號系列化, 集成負載多樣化
經過30余名工程技術人員8年的優化改進, 完成了工藝和技術的多次更新, 使“黑珍珠”波浪滑翔器的工作可靠性得以顯著增強。目前, “黑珍珠”產品系列相比國內其他同類產品而言最為全面。自2012年開展研發以來, 已經形成了微型、小型、中型、大型和巨型五種規格的波浪滑翔器系列化產品, 系列化型號可以為“黑珍珠”的集成載荷匹配恰當的發電功率和負載能力等[20-21]。
另外, 研發團隊又根據客戶需求和應用環境特點陸續推出了其他新概念的波浪滑翔器系列產品, 如有些裝備可應用于3 m左右水深的近海海域環境, 有些裝備可以在強流海域實現高精度控位和導航, 有些裝備可以集成較大質量和較大功耗的負載等。
研發團隊在發展“黑珍珠”波浪滑翔器不同產品系列的同時, 也根據應用需求嘗試集成了不同類型的各種負載。如針對海洋哺乳動物調查加裝了單通道的水聽器, 針對臺風觀測加裝了氣象站、波浪以及溫鹽傳感器等, 針對水下固定設備的水面通訊中繼加裝了水聲通訊模塊, 針對海流測量加裝了聲學多普勒流速剖面儀(Acoustic Doppler Current Profiler, ADCP), 針對中法衛星遙感驗證加裝了波浪譜傳感器, 針對水質生態監測加裝了葉綠素、溶解氧傳感器等[22-24]。

表1 產品型號系列的指標參數
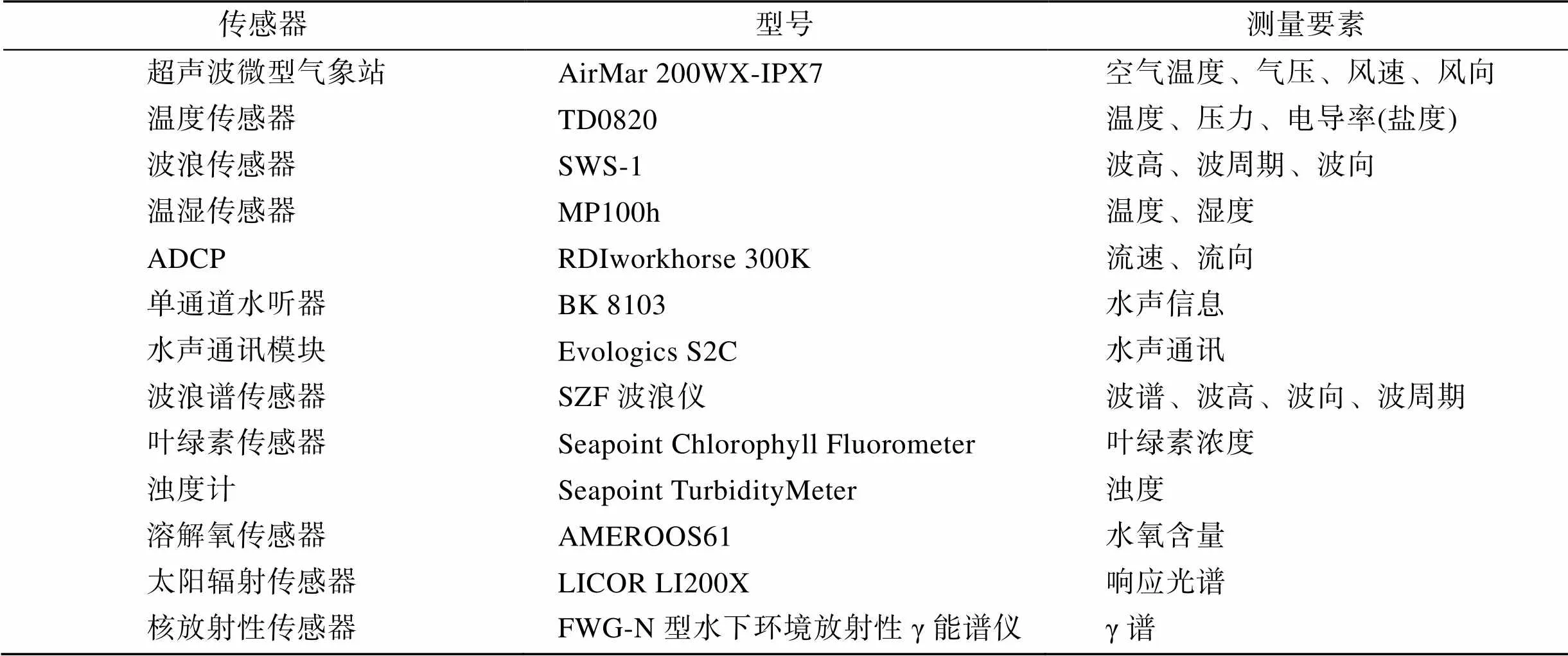
表2 “黑珍珠”波浪滑翔器集成傳感器列表
2.2 我國首次市場公開招投標銷售, 中標銷售次數最多
2018年至2020年期間, “黑珍珠”波浪滑翔器憑借其可靠的質量、完善的服務、良好的口碑和信譽, 順利并多次中標。“黑珍珠”波浪滑翔器產品得到市場的認可, 團隊的科研付出和產品的技術水平的得到肯定。
2017年12月27日, “黑珍珠”小型波浪滑翔器參與中山大學的公開招標并成功中標。此次中標的“黑珍珠”小型波浪滑翔器由青島海舟科技有限公司生產, 并授權給北京海洋明天科技有限公司進行投標銷售。根據中山大學需求, 該次中標產品將在未來使用過程中集成氣象站、波浪傳感器和水面溫鹽傳感器等。
2019年8月8日, “黑珍珠”小型波浪滑翔器參與自然資源部第二海洋研究所的公開招標并成功中標。本次中標的兩臺“黑珍珠”小型波浪滑翔器均需要搭載AirMar氣象站、水溫傳感器和波浪傳感器等[25]。
2019年8月26日, “黑珍珠”小型波浪滑翔器參與自然資源部第三海洋研究所的公開招標并成功中標。根據三所的使用需求, 本次中標的一臺“黑珍珠”小型波浪滑翔器在未來使用過程中將集成氣象站、波浪傳感器和水面溫鹽等儀器設備。
2019年12月13日,“黑珍珠”波浪滑翔器參與海南大學的公開招標并成功中標。此次中標的波浪滑翔器是“黑珍珠”中型波浪滑翔器, 由青島海舟科技有限公司生產, 并授權給三沙國海通信發展有限公司進行投標銷售。根據海南大學需求, 該次中標產品需集成微型氣象站和水面溫鹽深CTD等傳感器, 此外, 還需集成慣性導航和多波束測深等大功率載荷等。
2.3 國產化率高, 初步開展產業化推進
研究團隊自研發初期就一直秉承完全國產化的研發目標, 在波浪驅動原理、船體成型工藝、鎧裝纜成型工藝、牽引機成型工藝以及核心控制算法上進行了最底層的開發。“黑珍珠”基本避開了目前國內水下裝備產業關鍵核心部件依靠進口的這一瓶頸問題, 國產化率95%以上。由于所有核心技術都由團隊掌握, 其制造周期、加工成本和型號化進程也較國外品牌有獨特優勢。
2018年,“黑珍珠”研究團隊推動我國首個波浪滑翔器技術專業公司-青島海舟科技有限公司的成立。公司主要從事波浪滑翔器技術開發、產品銷售、應用推廣、觀測服務和支撐全球外海大洋實時觀測數據等, 設置產品中心、服務中心和數據中心三個主營業務內容, 全方位支撐海氣界面各種要素的長期實時常態化觀測, 為氣象水文調查、水質生態監測、背景噪聲測量以及衛星遙感驗證等海洋應用提供技術解決方案。
“黑珍珠”波浪滑翔器技術的研發與產業化推廣, 是我國高端海洋裝備產業化中較為成功的一例。僅2019年, 青島海舟科技有限公司就以優質和高效的服務贏得了清華大學、中山大學、自然資源部第二海洋研究所、自然資源部第三海洋研究所、海南大學和中國船舶重工集團公司第七一〇研究所等諸多單位的訂單。“黑珍珠”波浪滑翔器的產業化在產生經濟效益的同時, 也產生了廣泛的社會效益。
“黑珍珠”技術團隊自2012年成立以來, 圍繞波浪滑翔器技術攻關, 專業于機械結構設計、控制系統設計、導航算法設計、水動力計算、有限元計算、數據質量控制、衛星與設計等, 形成了波浪動力轉化、導航控制設計、集成拓展應用、遠程岸基監控等關鍵核心技術群。截至2020年3月, “黑珍珠”波浪滑翔器已批量生產100余套, 國內市場占有率90%以上。
3 團隊結構層次完善, 知識產權全面布局
3.1 團隊結構層次完善, 專業分工明確
自2012年以來, “黑珍珠”團隊緊緊圍繞波浪滑翔器及其應用進行技術攻關, 形成了一支穩固而專業的技術開發與服務團隊。當前核心團隊規模30余人, 其中固定人員20余人, 在讀碩士10余人。固定人員中2人具有博士學位, 8人具有碩士學位, 本科及以下學歷10余人。
團隊成員專業分工明確, 分為機械結構設計、控制系統設計、導航算法設計、水動力計算、有限元計算、數據質量控制、衛通與監控設計等不同崗位。各成員相互合作, 共同攻關, 擁有波浪滑翔器的波浪動力轉換、導航控制設計、集成拓展應用、遠程岸基監控等關鍵核心技術的自主知識產權。
團隊成員共同聚焦于發展波浪滑翔器技術, 重點突出長期性、智能性、規模化等特征, 完成精準導航、在線智能、同構組網等核心技術攻關。致力于構建全球外海大洋常態化和業務化的無人觀探測體系, 開啟海洋觀測和探測的新時代。
此外, 在與相關海洋技術研發機構的合作過程中逐漸發展形成了一支宏觀技術隊伍, 不同海洋技術人才針對“黑珍珠”開展技術開發工作, 如配套傳感器研發、海洋觀測方法研究、海洋數據專業解析、業務化體系維護等。
同時, 團隊成員與海洋科學研究部門合作, 共同專注于“黑珍珠”的氣象水文調查、水質生態監測、環境噪聲記錄、衛星遙感驗證、臺風原位觀測、哺乳動物監聽以及波浪譜測量等海洋科學應用研究[26-27]。
3.2 申請發明專利, 知識產權全面布局
研發團隊圍繞波浪滑翔器技術發表數篇相關學術論文, 研究內容涉及波浪滑翔器的動力學建模、控制算法、CFD模擬仿真、海洋數據分析等諸多領域, 為“黑珍珠”波浪滑翔器的產品定型及技術升級提供理論支撐。
動力學建模的研究為波浪滑翔器結構優化和控制系統優化提供理論基礎[28]; 控制算法的深入研究保障波浪滑翔器具有較高的軌跡逼近精度[29]; CFD模擬仿真的研究為支撐波浪滑翔器結構優化, 降低優化成本; 海洋數據分析為海洋科學家提供第一手資料, 并指導波浪滑翔器提高數據測量的準確性和精度。
研究團隊對波浪滑翔器的機械結構、電控、測試裝置進行了深入的研究與探索, 并對研究成果進行了知識產權的保護。研究團隊授權代表性專利數項, 內容涉及創新型機械結構、高效測試裝置、新型控制系統等諸多領域。此外, 研究團隊也十分注重商業性知識產權的保護, 對現有的設備進行了品牌化包裝。2017年至今, 成功完成了“黑珍珠”、“Black Pearl”和“海哨兵”等商標的注冊。
研究團隊在發展過程中也參與本科生和研究生的培養, 為研究生和本科生開設了《波浪滑翔器技術及其海洋觀測應用》、《自主水下航行器優化設計》《無人移動海洋觀測平臺技術導論》等課程, 此外, 研究生參與波浪滑翔器項目研發, 實踐中增長了海洋技術和理論知識, 產出了一大批高水平學位論文等。
4 結束語
高端海洋裝備的研發需要機械、電控、軟件等專業背景, 此外, 還需要遵循由機理研究、關鍵技術攻關、樣機研制、技術固化到工程化建設的發展規律。“黑珍珠”波浪滑翔器經過近30位專業技術人員8年的堅守和專注, 方可促使該技術從0到1, 然后再從1到的發展。
“黑珍珠”波浪滑翔器技術是我國最早開展研發并且持續時間最長, 資助研究課題最多且資助額度合計最大, 我國首次亦是唯一完成臺風常態化觀測, 我國單次航程航時最長且累積航程最遠; 產品系列最全且拓展應用最廣, 開展新概念研發并擁有自主知識產權, 批量生產規模最大且產業化推進相對成功, 團隊結構層次完善并專業分工明確, 我國首次市場公開招投標銷售且中標次數最多, 我國首次嘗試并唯一實現西太平洋多臺組網常態化觀測的波浪滑翔器技術。
當前, 研究團隊正致力于構建全球外海大洋海氣界面觀測陣列并使之常態化運行, 同時也正面向海洋觀測需求發展創新技術以提升波浪滑翔器的功能和性能。“黑珍珠”波浪滑翔器技術的發展道路困難重重, 研發團隊仍需任重道遠, 朝著既定的目標不斷前行。“黑珍珠”波浪滑翔器技術的發展離不開團隊的緊密協作, 在此感謝廣大研發人員的共同努力, 同時也感謝與“黑珍珠”團隊密切合作的諸位海洋科學家與海洋工程專家。
[1] Daniel T, Manley J, Trenaman N. The Wave Glider: enabling a new approach to persistent ocean observation and research[J]. Ocean Dynamics, 2011, 61(10): 1509-1520.
[2] Manley J, Willcox S. The Wave Glider: a persistent platform for ocean science[C]// IEEE. Oceans. Sydney Nsw: IEEE, 2010: 1-5.
[3] Manley J, Willcox S. The Wave Glider: A new concept for deploying ocean instrumentation[J]. IEEE Instrumentation & Measurement Magazine, 2010, 13(6): 8-13.
[4] Hine R, Willcox S, Hine G, et al. The Wave Glider: a wave-powered autonomous marine vehicle[C]// IEEE. Oceans. Biloxi MS: IEEE, 2009: 1-6.
[5] 吳俊飛, 杜照鵬, 熊學軍. 新型仿生波浪滑翔器水翼設計與水動性能研究[J]. 機械制造, 2017, 55(8): 20-23. Wu Junfei, Du Zhaopeng, Xiong Xuejun. Hydrofoil design and hydrodynamic performance study of a new type of bionic Wave Glider[J]. Machinery, 2017, 55(8): 20-23.
[6] 杜照鵬. 新型仿生波浪能滑翔器的設計與研究[D]. 青島: 青島科技大學, 2017. Du Zhaopeng. Design and hydrodynamic performance study of a new bionic wave energy glider[D]. Qingdao: Qingdao University of Science and Technology, 2017.
[7] 胡滕艷, 孫秀軍, 王兵振, 等. 利用Fluent仿真分析波浪滑翔器的水動力性能[J]. 海洋技術學報, 2018, 37(3): 8-12. Hu Tengyan, Sun Xiujun, Wang Bingzhen, et al. Simulative analysis of the hydrodynamic performances of Wave Gliders using fluent[J]. Journal of Ocean Technology, 2018, 37(3): 8-12.
[8] 付誠翔. 波浪滑翔器的浮體阻力及運動性能分析研究[D]. 哈爾濱: 哈爾濱工程大學, 2017. Fu Chengxiang. Analysis and floating resistance and motion performance of Wave Glider[D]. Harbin: Harbin Engineering University, 2017.
[9] 李燦. 波浪滑翔器動力學分析及性能優化[D]. 天津: 天津工業大學, 2018. Li Can. Dynamic analysis and performance optimization of Wave Glider[D]. Tianjin: Tiangong University, 2018.
[10] 胡合文. 波浪滑翔機的水動力分析[D]. 哈爾濱: 哈爾濱工程大學, 2015. Hu Hewen. Hydrodynamic analysis of Wave Glider[D]. Harbin: Harbin Engineering University, 2015.
[11] 廖煜雷, 李曄, 劉濤, 等. 波浪滑翔器技術的回顧與展望[J]. 哈爾濱工程大學學報, 2016, 37(9): 1227-1236.Liao Yulei, Li Ye, Liu Tao, et al. Unmanned Wave Glider technology: state of the art and perspective[J]. Journal of Harbin Engineering University, 2016, 37(9): 1227- 1236.
[12] 楊燕, 張森, 史健, 等. 波浪動力滑翔機海洋環境監測系統[J]. 海洋技術學報, 2014, 33(1): 109-114. Yang Yan, Zhang Sen, Shi Jian, et al. Wave Glider marine environmental monitoring system[J]. Journal of Ocean Technology, 2014, 33(1): 109-114.
[13] 孫秀軍, 王雷, 桑宏強.“黑珍珠”波浪滑翔器南海臺風觀測應用[J]. 水下無人系統學報, 2019, 27(5): 562-569. Sun Xiujun, Wang Lei, Sang Hongqiang. Application of Wave Glider “Black Pearl” to typhoon observation in south china sea[J]. Journal of Unmanned Undersea Systems, 2019, 27(5): 562-569.
[14] Mitarai S, Mcwilliams J C. Wave Glider observations of surface winds and currents in the core of typhoon Danas[J]. Geophysical Research Letters, 2016, 43(21): 312-319.
[15] 盧旭. 波浪滑翔器總體技術研究[D]. 哈爾濱: 哈爾濱工程大學, 2015.Lu Xu. Research on the general technology of Wave Glider[D]. Harbin: Harbin Engineering University, 2015.
[16] 王娉. 獲取3個臺風第一手數據, 青島自主研發臺風“捕手”連續航行3 884 km[EB/OL]. [2020-03-08]. https://wap.peopleapp.com/article/rmh12006842/rmh12006842?from=singlemessage.
[17] 侯霞.“海哨兵”波浪滑翔器順利完成菲律賓海與中國南海臺風觀測[EB/OL]. [2020-03-06]. http://www. qnlm.ac/page?a=5&b=2&c=218&p=detai.
[18] 桑宏強, 游宇嵩, 孫秀軍. 波浪滑翔器網絡版岸基監控中心設計[J]. 水下無人系統學報, 2019, 27(5): 521-528. Sang Hongqiang, You Yusong, Sun Xiujun. Design of Wave Glider network edition shore base monitoring center[J]. Journal of Unmanned Undersea Systems, 2019, 27(5): 521-528.
[19] 韓俊梅.“問海計劃”支撐“透明海洋”工程[EB/OL]. [2019-09-26]. http://www.qnlm.ac/page?a=14&b=1&c= 669&p=detail.
[20] 賈立娟. 波浪動力滑翔機雙體結構工作機理與動力學行為研究[D]. 天津: 國家海洋技術中心, 2014. Jia Lijuan. Study of operation principle of two-part architecture and dynamic behavior of Wave Glider[D]. Tianjin: National Ocean Technology Center, 2014.
[21] 李小濤. 波浪滑翔器動力學建模及其仿真研究[D]. 武漢: 中國艦船研究院, 2014. Li Xiaotao. Dynamic model and simulation study based on the Wave Glider[D]. Wuhan: China Ship Research and Development Academy, 2014.
[22] Smith R N, Das J, Hine G, et al. Predicting Wave Glider Speed from Environmental Measurements[J]. Mine Warfare & Ship Self-Defense, 2015, 12(1): 19-28.
[23] 吳小濤. 由海洋環境要素預估波浪滑翔器速度[J].水雷戰與艦船防護, 2015, 23(1): 70-76. Wu Xiaotao. Predicting Wave Glider speed from environmental measurements[J]. Mine Warfare & Ship Self- Defence, 2015, 23(1): 70-76.
[24] Ngo P, Das J, Ogle J, et al. Predicting the speed of a Wave Glider autonomous surface vehicle from wave model data[C]// IEEE. International Conference on Intelligent Robots and Systems. Chicago, IL: IEEE, 2014: 2250-2256.
[25] 桑宏強, 李燦, 孫秀軍. 波浪滑翔器縱向速度與波浪參數定量分析[J]. 水下無人系統學報, 2018, 26(1): 16-22. Sang Hongqiang, Li Can, Sun Xiujun. Quantitative analysis on longitudinal velocity and wave parameter of Wave Glider[J]. Journal of Unmileanned Undersea Systems, 2018, 26(1): 16-22.
[26] 楊鯤, 盧倪斌, 隋海琛, 等.基于D-H方法的波浪滑翔器動力學仿真分析[J].哈爾濱工程大學學報, 2020, 41(1): 145-152. Yang Kun, Lu Nibin, Sui Haichen, et al. Dynamic simulation analysis on Wave Glider based on D-H approach[J]. Journal of Harbin Engineering University, 2020, 41(1): 145-152.
[27] 李小濤, 王理, 吳小濤, 等. 波浪滑翔器原理和總體設計[J]. 四川兵工學報, 2013, 34(12): 128-131. Li Xiaotao, Wang Li, Wu Xiaotao, et al. Principle and system design of a Wave Glider[J]. Journal of Sichuan Ordnance, 2013, 34(12): 128-131.
[28] 丁乃蓬. 波浪驅動滑翔器工作機理分析與水下滑翔體的結構設計[D]. 杭州: 浙江大學, 2015. Ding Naipeng. Analysis of operation principle of Wave Glider and research of structure design for underwater glider[D]. Hangzhou: Zhejiang University, 2015.
[29] 楊富茗, 王大政. 波浪能滑翔機理論和數值計算研究現狀[J]. 艦船科學技術, 2016, 38(15): 1-4. Yang Fuming, Wang Dazheng. Research status on theory and numerical calculation of Wave Glider[J]. Ship Science and Technology, 2016, 38(15): 1-4.
Research review on “Black Pearl” Wave Glider
SUN Xiu-jun1,4, SANG Hong-qiang2, LI Can3, ZHOU Ying3, YU Pei-yuan1, WANG Lei1
(1. Physical Oceanography Laboratory, Ocean University of China, Qingdao 266100, China; 2. School of Mechanical Engineering, Tiangong University, Tianjin 300387, China; 3. Institute for Advanced Ocean Study, Ocean University of China, Qingdao 266100, China; 4. Laboratory for Ocean Dynamics and Climate, Pilot National Laboratory for Marine Science and Technology (Qingdao), Qingdao 266237, China)
the “Black Pearl” Wave Glider; typhoon observation; extreme sea conditions; maximum voyage; localization rate; batch production
With the support of national science and technology program thoroughly, the Wave Gliders has completed various pioneering applications, and has completed the difficult transformation of localization, model and production, and the Wave Glider team has also developed a strong form of structural management and intellectual property layout.From these dimensions, this paper describes the development law of high-end marine equipment such as wave glider from mechanism research, key technology research, prototype development, technology solidification to engineering construction.So that readers can learn more about the current progress of Wave Glider, its use value and its important role in marine environment observation and marine security detection.
Mar.15, 2020
National Key R&D Plan of China, No. 2017YFC0305902; Wenhai Program of Qingdao National Laboratory for Marine Science and Technology, No. 2017WHZZB0101; Tianjin Municipal Natural Science Foundation, No. 18JCZDJC40100; Key R&D Program of Shandong Province, No.2019JZZY020701]
孫秀軍(1981-), 男, 山東淄博人, 博士, 教授, 主要從事海洋移動觀測技術研究, 電話: 18222138339, E-mail: sxj@ouc.edu.cn; 桑宏強(1978-), 通信作者, 男(滿族), 河北隆化人, 博士, 教授, 主要從事海洋無人平臺技術研究, 電話: 15022040488, E-mail: sanghongqiang@tiangong.edu.cn
P715.9
A
1000-3096(2020)12-0107-09
10.11759/hykx20200315001
2020-03-15;
2020-07-02
國家重點研發計劃重點專項(2017YFC0305902); 青島海洋科學與技術試點國家實驗室“問海計劃”項目(2017WHZZB0101); 天津市自然科學基金重點基金(18JCZDJC40100); 山東省重點研發計劃重大科技創新工程(2019JZZY020701)
(本文編輯: 劉珊珊)
