掘進機控制系統研究
2020-12-31 02:36:36
鑿巖機械氣動工具 2020年4期
(霍州煤電集團回坡底煤礦,山西 洪洞041600)
0 引言
掘進機是巷道掘進過程中重要的機械設備,其系統的運行及控制直接影響到掘進效果[1,2]。目前,掘進機截割部位運行速度的控制、巷道斷面成形、機身位置的監測以及系統的監控已經成為研究熱點,研究掘進機控制系統對巷道成形具有重要意義[3-6]。
本文旨在解決巷道成形問題,對回坡底礦井懸臂式掘進機控制系統進行了力學建模計算和系統優化,實現了煤巖體的識別和巷道斷面自動成形,應用效果良好。
1 掘進機控制系統
1.1 掘進機控制系統需求
掘進機是巷道掘進過程中重要的機械設備,巷道斷面的形成依賴于掘進機截割頭的姿態,只有掘進機截割頭處于正常姿態時,巷道斷面才會達到要求,掘進機的控制系統需具備以下條件。
(1)掘進機機頭需具有煤巖體動態感知的能力。通過掘進頭多傳感的監測功能,實現煤巖體的區分,有利于穩定截割電機的電流、油缸壓力以及速度等,保障自動截割的順利進行。
(2)掘進機系統需具備截割頭位姿監測的功能。實現截割頭位姿的檢測便于系統進行精確控制,有利于伸縮液壓缸、垂直液壓缸和水平液壓缸的協同運作。
(3)掘進機需具備斷面自動成形的功能。當截割頭處于正常位姿時,因為受力不均,截割頭位置容易出現偏差,造成斷面參數的偏差,因此需要對掘進機進行機身偏移量的測量,通過數學關系式進行補償計算。當機身位置符合掘進要求時,系統自動啟動斷面成形程序,設備運行過程中
截割頭的運行速度以及液壓缸油壓等參數都基于控制算法進行控制,以確保斷面成形的實現。
由此可見,對掘進機截割部位進行力學建模
分析對于巷道斷面成形具有重要意義。
1.2 截割部動力學建模
根據掘進機控制系統需求,對掘進機截割部進行動力學研究,掘進機截割部位運動學模型如圖1所示,圖中,連桿長度分別為a1、a2、b3、0,對應
的連桿扭矩角分別為0°、-90°、90°和0°,對應的
偏置量分別為b2、0、a3+Δl、l4,對應的關節角度
為-32°—32°、-26°—42°、0°、0°,捷聯慣導坐標系用OXYZ表示。
圖中O4代表截割部位的中心,則掘進機機身相對截割中心的坐標可用以下關系式表示

圖1 掘進機截割部位運動學模型

因此可知,掘進機機身在捷聯慣導坐標系中相對截割中心的坐標用以下關系式表示:
公式中,回轉臺繞坐標X 的旋轉角度為θ1,回轉臺繞坐標Z 的旋轉角度為θ2,截割頭伸縮量用Δl表示,值為正,截割頭的安全位置以及參數分別用a1、a2、a3、b1、b2、b3表示,具體位置如圖1所示。
利用變換法求解得到截割部的運動學方程如下

由公式可知,掘進機截割部位的位置以及速度直接受到旋轉角度θ1、θ2的影響,因此可對不同角度下掘進機運行狀態進行分析。
2 巷道斷面自動成形應用控制
回坡底礦井的巷道斷面多為矩形斷面,因此本文對旋轉角度為θ1和θ2下標準角度進行誤差分析,其中θ1分別取值-20°、0°和20°,θ2分別取值-20°、0°和20°,角度按照從正到負的順序進行實驗,得到圖2所示的結果。
從圖2中可以看出,當θ1角度為-20°時,θ2的控制誤差最大值達到0.72°,θ1角度為20°時,θ2的控制誤差最大值達到0.7°,θ1角度為0°時,θ2的控制誤差最大值達到0.68°。當θ2角度為-20°時,θ1的控制誤差最大值達到0.74°,θ2角度為20°時,θ1的控制誤差最大值達到0.71°,θ2角度為0°時,θ1的控制誤差最大值達到0.68°;根據誤差值可以看出,當截割壁角度的絕對值越小,控制誤差值越小,回坡底煤礦目前采用的掘進機型號為EBZ160,根據現場掘進經驗以及計算可以得出,當掘進機的回轉角度和升降角度的誤差值小于0.8°時,可以實現精確控制,達到斷面自動成形控制的目的。
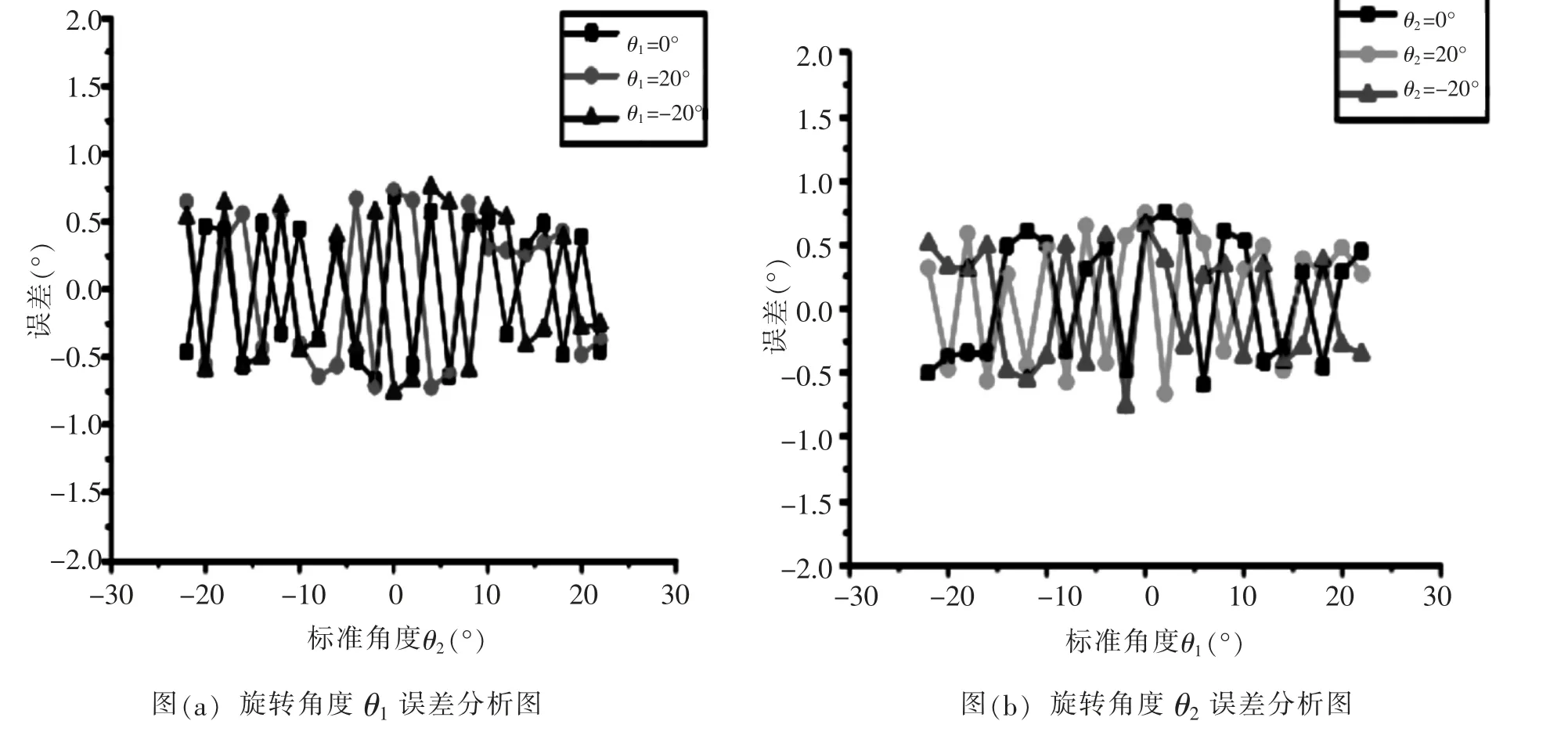
圖2 截割部位誤差控制分析圖
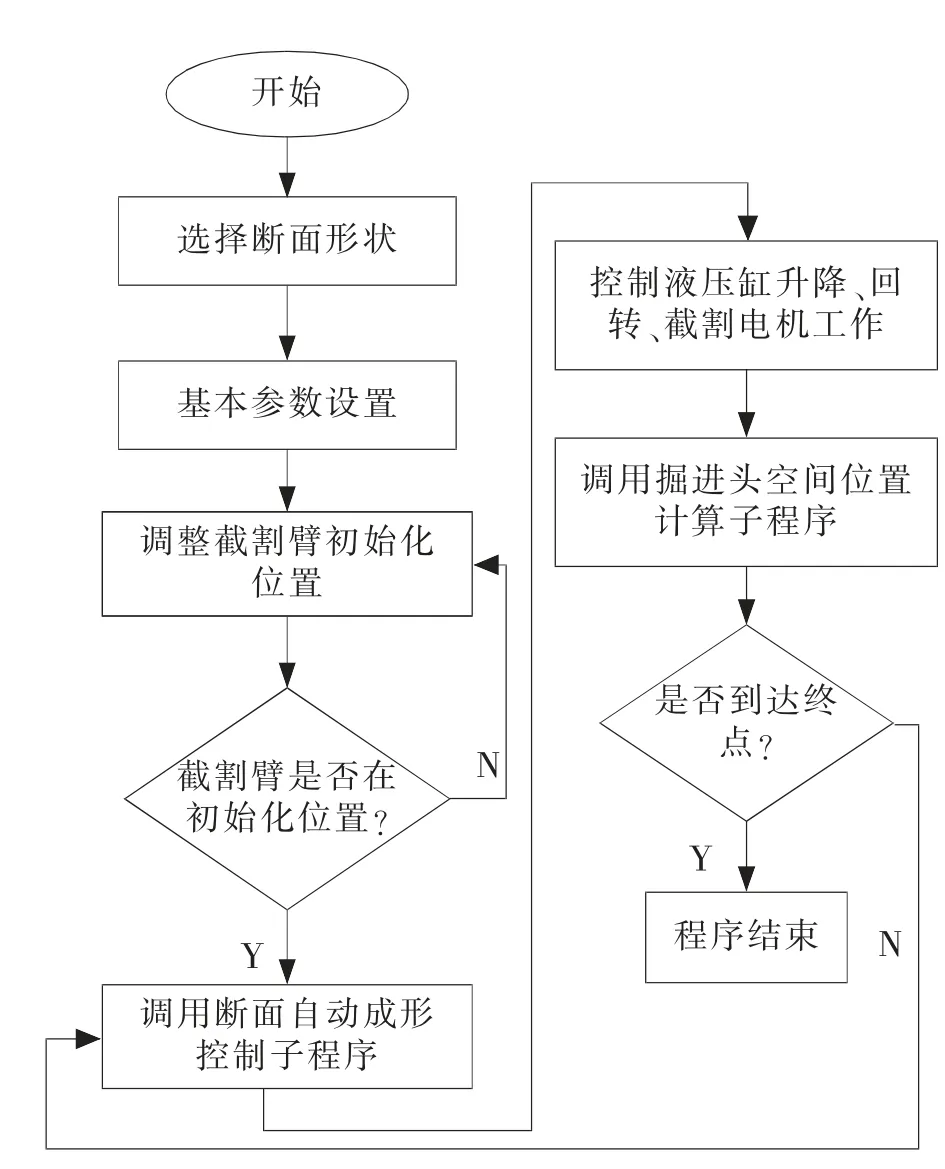
圖3 斷面自動成形控制程序流程圖
截割部運行數據經過數據傳感器采集獲得,傳送至DSP,經過DSP 的計算處理后傳送至DA模塊中,該模塊通過對數據信號的放大實現了截割部的控制功能,當掘進機和巷道的相對位置滿足截割需求時,系統自動進行誤差補償,隨后進行斷面截割系統的運行。斷面自動控制程序:當系統開始運用后,傳感器首先監測到截割頭的運行速度和液壓缸的壓力等參數,當截割部位接近巷道邊界時,截割臂的擺幅以及速度降低,控制系統自動監測掘進機的空間位置,根據礦井掘進需求,系統計算出合適的擺動角度,通過合理控制液壓缸的位移,實現截割臂擺幅的控制,從而實現了斷面自動成形的控制功能。根據上述討論,當掘進機的回轉角度和升降角度的誤差值小于0.8°時,可以實現截割臂精確控制,礦井可根據掘進巖層強度等參數進行適當的調整。
圖4為巷道斷面自動成形控制系統應用效果圖。可以看出,掘進機控制系統基本實現了斷面自動成形的目的。實際截割軌跡呈現多波形,這是因為巷道圍巖強度不一致導致設備運行過程中受力不穩定造成,這一現象在巷道拐角處更為明顯,但截割誤差較小,已經滿足巷道掘進的要求,證明了斷面自動成形控制程序的可行性。
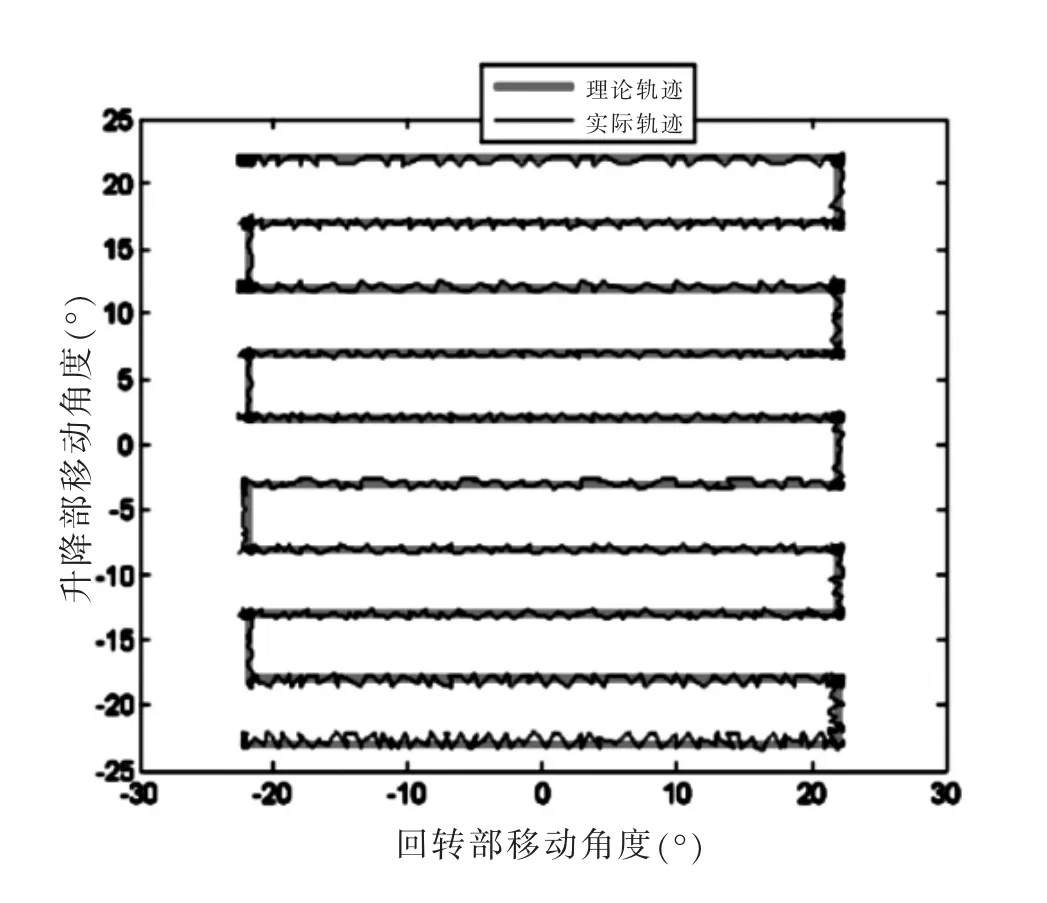
圖4 巷道斷面自動成形控制系統應用效果
3 結論
(1)通過截割部動力學建模,得到掘進機截割部位的位置以及速度直接受到旋轉角度為θ1和θ2的影響。
(2)巷道斷面自動成形程序顯示,當掘進機的回轉角度和升降角度的誤差值小于0.8°時,可以實現精確控制,達到斷面自動成形控制的目的。
(3)巷道斷面自動控制系統應用效果良好,實現了巷道斷面自動成形控制的目的,滿足巷道掘進的要求。
