薄煤層工作面自動化控制關鍵技術研究
2020-12-31 07:41:52溫華
山西焦煤科技 2020年11期
溫 華
(山西焦煤集團有限責任公司 機電部,山西 太原 030024)
煤炭在我國能源結構中的比重持續居高不下,其中薄煤層煤炭資源儲量豐富,超過80%以上的礦井擁有薄煤層工作面[1].在以綜合機械化為主流開采手段的現代化煤礦中,煤炭產量雖逐年提升,但由于薄煤層的自動化控制技術還沒有得到廣泛推廣,導致薄煤層產量占比呈下降趨勢[2].為適應薄煤層工作面少人無人的生產要求及建設智能礦山的發展要求,薄煤層綜采機電設備和與之相匹配的自動化控制系統必須盡快完善。我國薄煤層液壓支架、采煤機和輸送機的自動化控制研究已進入實質性階段,各子系統的協同工作與集中控制均取得很大的成功[3].相較于常見的中厚煤層開采,薄煤層工作面由于環境、適應性等原因,自動化控制技術推廣進展緩慢,工作面設備無法實現遠程協同工作,仍然需要人工現場操作,造成部分薄煤層工作面出現費時費力且產量不高的現狀[4].因此,針對薄煤層的自動化控制技術展開研究,完善適用于薄煤層機電設備的自動控制技術,以使薄煤層工作面各設備實現自動協同工作。
1 薄煤層液壓支架自動跟機技術
1.1 基于采煤機位置的液壓支架自動跟機技術
采煤機自身有一定的長度,在采煤機采煤位置的液壓支架不能執行任何動作,只有采煤機滾筒前后的液壓支架執行相應的動作。同時,為了使采煤機和液壓支架能夠協同動作,液壓支架自動跟機速度vz應大于采煤機的牽引速度,即:
(1)
式中:
vc—采煤機牽引速度,m/s;
vz—液壓支架自動跟機速度,m/s;
nz—同時移動的液壓支架數;
tz—自動跟機循環用時,s,現有控制方式下超過8.
bz—相鄰液壓支架中心距,m,取1.5.
采煤機割煤速度約為15 m/min,根據式(1),則同時移動的液壓支架數大于1架,在薄煤層自動控制下,確保支架自動跟機運行穩定,需要設置一定的移架范圍做為安全距離。
用Δxi表示第M架液壓支架與采煤機機身中心正對支架間的支架架數,根據定義可得:
Δxi=|M-N|
(2)
式中:
N—采煤機中心支架號;
M—執行控制動作的液壓支架編號。
采用MG2×160/710-AWD型薄煤層采煤機機身長度6.75 m,約占5架液壓支架寬度,則Δxi對應值見表1.ZY3600/10/21D液壓支架自動跟機特性見表2.

表1 薄煤層工作面Δxi對應數值表
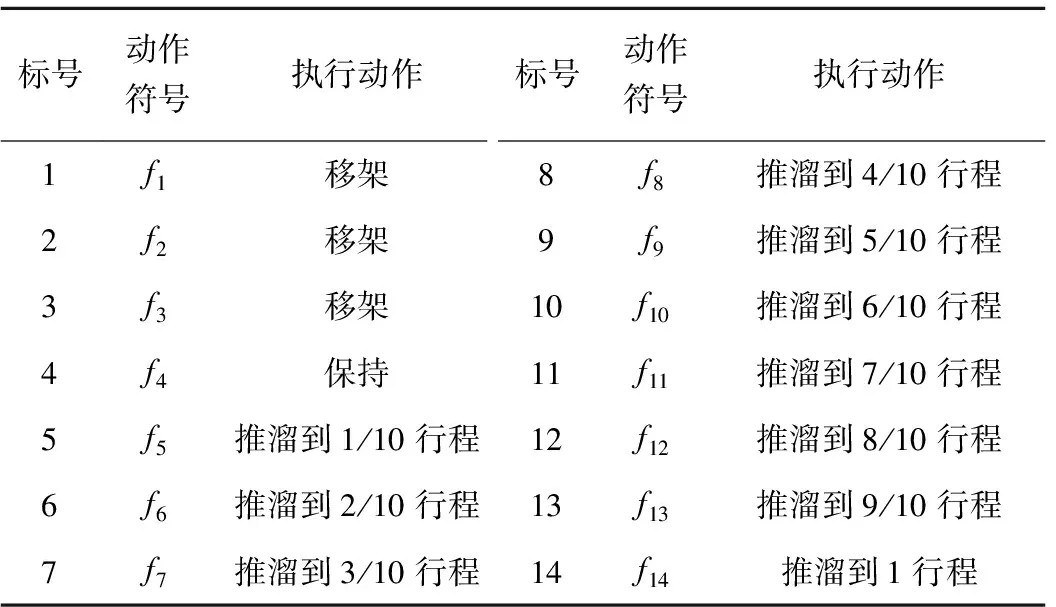
表2 ZY3600/10/21D液壓支架自動跟機特性表
f1—f3為移架動作,是“降-移-升”順序動作的總稱,降柱后控制推移千斤頂移架,并且在移架完成后完成升柱動作,及時支護頂板;f4為待命,確保移架和推溜之間具有一定安全距離;f2~f11為推溜過程,由于刮板輸送機的結構特性,只能采用分步推移的方法,此區域段的液壓支架推移位移曲線將呈現“S形”。
液壓支架與執行動作的對應關系為:
fi?M
即工作面第M架液壓支架執行動作為fi,當采煤機中心位于第N架液壓支架時,執行fi動作的為第M架支架,即表達式為:
fi=M=N-yΔxi
(3)
當采煤機在工作面內執行記憶截割時,隨著采煤機中心支架號N的變化,液壓支架控制器時刻檢測當前支架與采煤機的距離Δxi,并判斷當前液壓支架應該執行的指令fi,按照上述規則進行自動化跟機控制,見圖1.
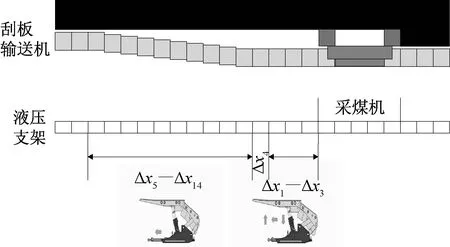
圖1 液壓支架自動跟機控制圖
當薄煤層液壓支架與采煤機相對距離處于Δx1—Δx3架時,距機身中心處后方第3架液壓支架已完成當前刀的截割,為保證頂板能夠得到及時支護,應該立即完成“降-移-升”的順序動作,實現液壓支架的移架。
當液壓支架與采煤機相對距離處于Δx5—Δx14架時,即機身中心處后方第5—14架液壓支架應將刮板輸送機中部槽推移到下一刀的工作所在位置,此區域內分別執行推溜1/10~1個行程,形成S彎,此區域內的液壓支架進行推溜動作時,將直接決定推移位姿的直線度。
1.2 基于液壓支架位姿的“降-移-升”調控技術
1)“降-移-升”調控技術研究。
液壓支架在自動控制模式下進行自動跟機時,主要完成“降-移-升”動作和推移刮板輸送機工作,“降-移-升”過程的執行時間決定了液壓支架的支護質量,薄煤層液壓支架自動跟機的過程中,“降-移-升”過程應盡可能縮短[5].因此,提出基于液壓支架位姿的“降-移-升”調控方法。
薄煤層液壓支架當前支護高度H是反映支架當前支護狀態的關鍵參數,根據定義,液壓支架“降-移-升”過程中立柱降柱高度ΔH為:
ΔH=Hmax-H
(4)
式中:
Hmax—液壓支架完全撐起時的支護高度,m.
則傳統控制方式在參數化后,液壓支架脫離頂板時降柱高度ΔH1為:
ΔH1=Hmax-Hmin
(5)
式中:
Hmin—液壓支架脫離頂板時的支護高度,m.
以此為依據的“降-移-升”過程只能在降柱動作執行完成后開始拉架動作,耗時較長,適應性較差。現從Hmin—Hmax中取得臨界支護高度Hc,當H=Hc時,支架推移千斤頂提供的拉架力Tc等于支架與頂底板的摩擦力之和,此時液壓支架剛好能被拉動,見圖2.
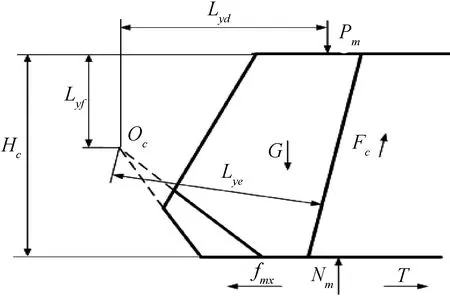
圖2 液壓支架臨界狀態受力圖
根據平衡條件,此時推移千斤頂拉架力Tc為:
Tc=pmfs+(pm+G)fx
(6)
式中:
pm—頂板壓力,MPa;
fs—支架與頂板的摩擦系數;
fx—支架與底座的摩擦系數;
G—液壓支架重力,kN.
由力矩平衡得出臨界支護高度下立柱支撐力Fc,另外通過支架壓力傳感器反饋的立柱底腔壓力確定的立柱支撐力Fc進行匹配,根據現場礦壓情況確定Hc的具體數值,此時的降柱高度ΔH2為:
ΔH2=Hmax-Hc
式中:
ΔH2—臨界狀態下液壓支架降柱高度,m.
因ΔH2<ΔH1,以ΔH2作為觸發移架動作條件,由傾角傳感器解算出ΔH=ΔH2時,液壓支架在降柱的同時開始執行移架命令,實現邊降邊移,有效縮短“降-移”總時間,提高自動跟機效率。根據液壓支架力學特性,此時液壓支架工作在帶壓移架狀態,推移千斤頂承受的移架力大于正常工作狀態,因推移千斤頂參數在液壓支架選型設計時已經確定,長時間工作在此狀態會拉斷推移千斤頂,為保證推移千斤頂使用壽命,在移架過程中立柱繼續保持降柱動作,直至液壓支架脫離頂板使支架高度降到Hmin,以減輕推移千斤頂負荷。薄煤層液壓支架“降-移-升”調控過程見圖3.
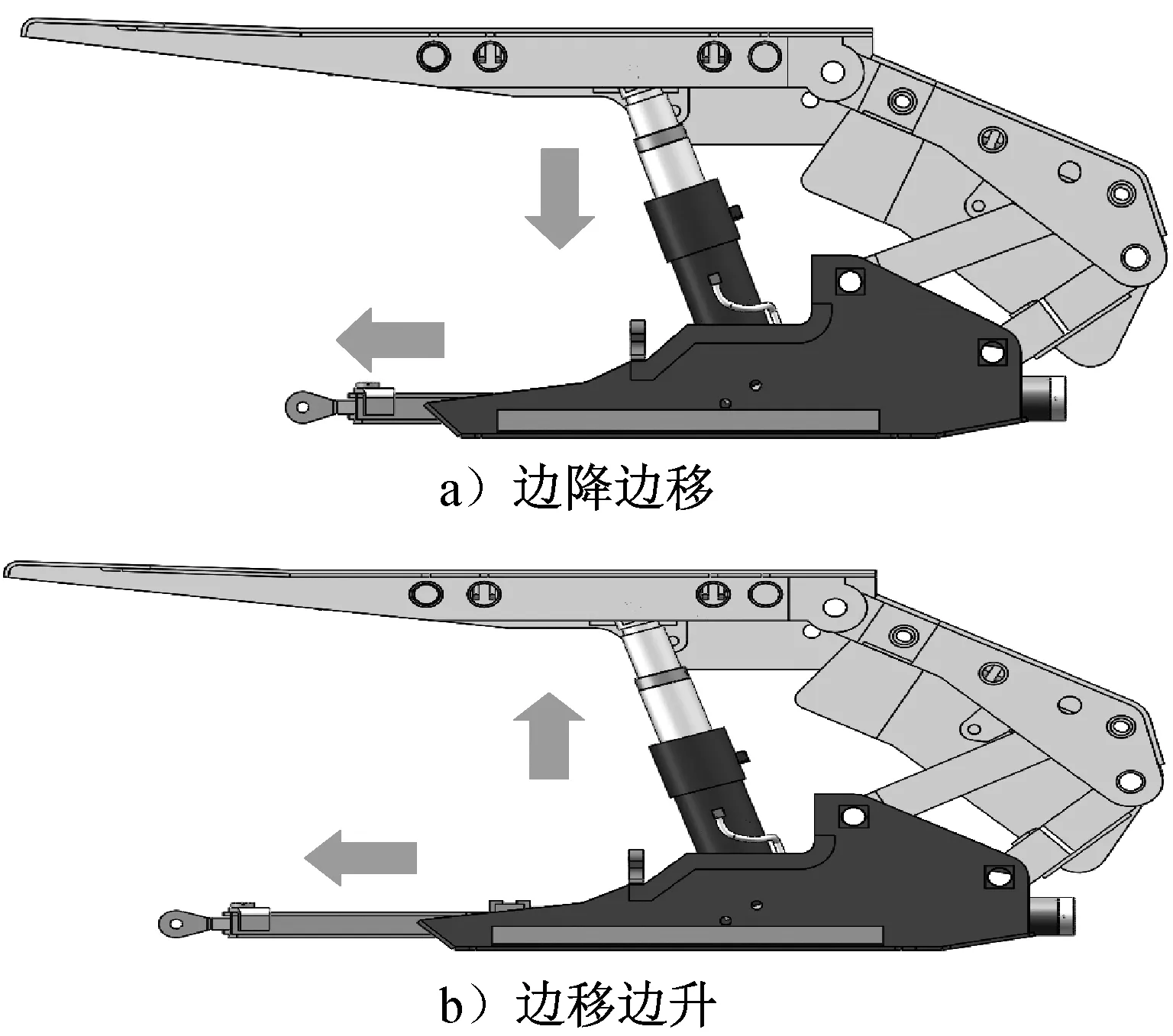
圖3 薄煤層液壓支架“降-移-升”調控過程圖
2)“降-移-升”工作特性分析。
為研究薄煤層液壓支架分段式“降-移-升”控制與基于液壓支架位姿的“降-移-升”調控的支護適應性,對兩種控制方式下的液壓支架工作特性進行分析。薄煤層液壓支架的降柱、移架、升柱動作均由各千斤頂實現,各千斤頂動作時間t可按下式計算:
(7)
式中:
V—千斤頂所需排出的液體體積,L;
q—供液流量,L/min.
ΔS=ΔHcosδ
(8)
式中:
ΔS—立柱動作行程,m;
δ—立柱與豎直方向的夾角,(°).
ZY6000/10/21D液壓支架立柱缸徑320 mm,降柱時最大流量出現在立柱底腔,根據壓力損失取回液流量140 L/min.根據工作面的工況條件,得頂梁脫離頂板時立柱降柱行程為ΔS1=100 mm,處于臨界支護高度Hc時立柱的降柱行程ΔS2=50 mm,則采用分段“降-移-升”時液壓支架立柱降柱ΔS1需要時間t1為:
(9)
(10)

(11)
ZY600/10/21D液壓支架推移千斤頂無桿腔d160 mm,推桿d105 mm,流量300 L/min,根據式(9)、(10),液壓支架移架800 mm所需要液體體積V2、移架時間t2為:
(12)
(13)
立柱升柱過程最大流量出現在進油,則完成整個升柱過程所需進液體積V3、升柱時間t3為:
(14)
(15)

(16)

(17)
薄煤層液壓支架分段“降-移-升”及基于液壓支架位姿進行調控的“降-移-升”總時間見表3.
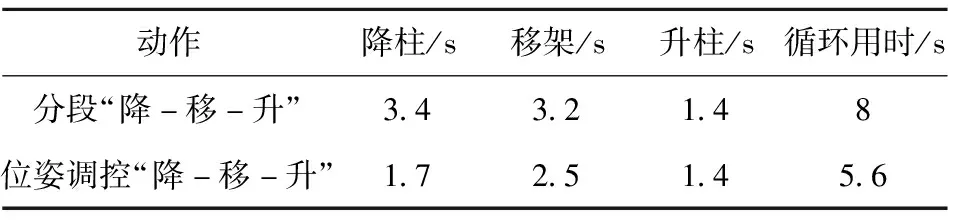
表3 “降-移-升”過程耗時對比表
采用基于液壓支架位姿的 “降-移-升”調控后,液壓支架可實現降柱卸載和移架工序的同步化,液壓支架“降-移-升”循環時間相較于分段控制縮短了30%,降低了自動跟機過程中頂板破碎的可能性,有利于頂板管理,提高了薄煤層液壓支架的支護適應性。
2 基于采煤機速度的刮板輸送機推移控制技術
現有的薄煤層刮板輸送機推移方式多為成組推移,即采煤機機身安全距離后8~10架液壓支架為一組,同時向煤壁側推移刮板輸送機。當第一組刮板輸送機推移到位后,第二組刮板輸送機的彎曲段被動生成,導致各節中部槽的推移狀態不受控制,將會影響推移過后的直線度[6].因此,提出一種基于采煤機速度的刮板輸送機順序推移控制方法,實現各節中部槽的自動、可控推移,減少每節中部槽在推移過程中的反復轉動。
刮板輸送機兩節中部槽由啞鈴銷連接,中間有間距,使得在液壓支架控制推移千斤頂對刮板輸送機進行推移的過程中,刮板輸送機會產生一段彎曲區間,見圖4.
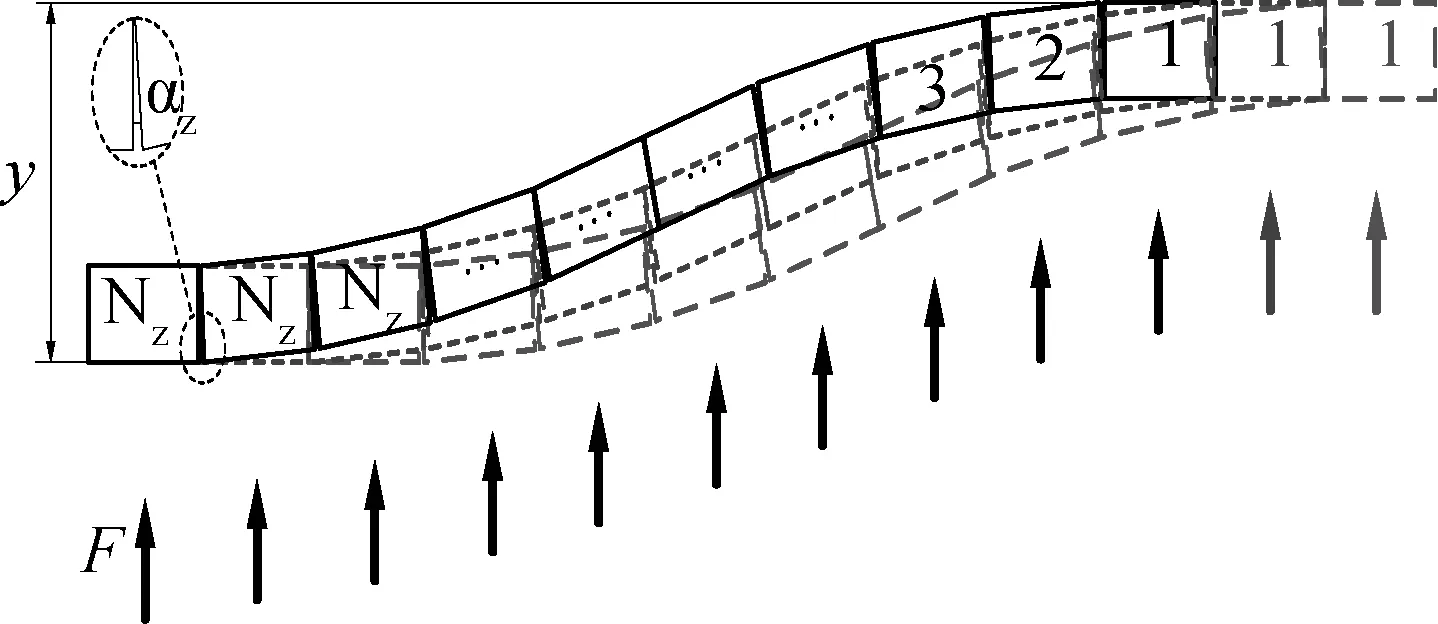
圖4 刮板輸送機彎曲段圖
刮板輸送機的彎曲段長度可按下式計算:
(18)
每節中部槽的位移量y為:
(19)
式中:
Ng—行成彎曲段的中部槽節數;
αg—中部槽之間允許的最大水平轉角,(°);
L1—中部槽寬度,m;
lg—中部槽長度,m;
bg—相鄰中部槽之間夾角所對應的弦長,m.
代入薄煤層刮板輸送機參數可知,行成彎曲段的中部槽節數Ng為10節。
為使刮板輸送機推移速度匹配采煤機運行速度,需要多臺支架同時執行推溜動作,由液壓支架控制器向目標支架發送控制指令,第一架液壓支架開始推溜后經延時T后,第二架液壓支架開始動作。同理,一個彎曲段內后續液壓支架經延時后相繼開始推溜,并不斷行成新的彎曲段,則目標支架收到推移控制指令頻率及延時為:
(20)
(21)
式中:
t4—刮板輸送機推移時間,s,取7.3.
代入得T=0.81 s,即在采煤機速度為15 m/min時,每隔0.81 s觸發一節中部槽,才能匹配采煤機的運行速度。
執行推移刮板輸送機命令的支架范圍Ns~Ne為:
Ns=N-Δx2+1
(22)
Ne=N-Δx2-Nz+1
(23)
則從推移開始到第一個彎曲段結束,有薄煤層工作面刮板輸送機自動推移動作時序圖見圖5.
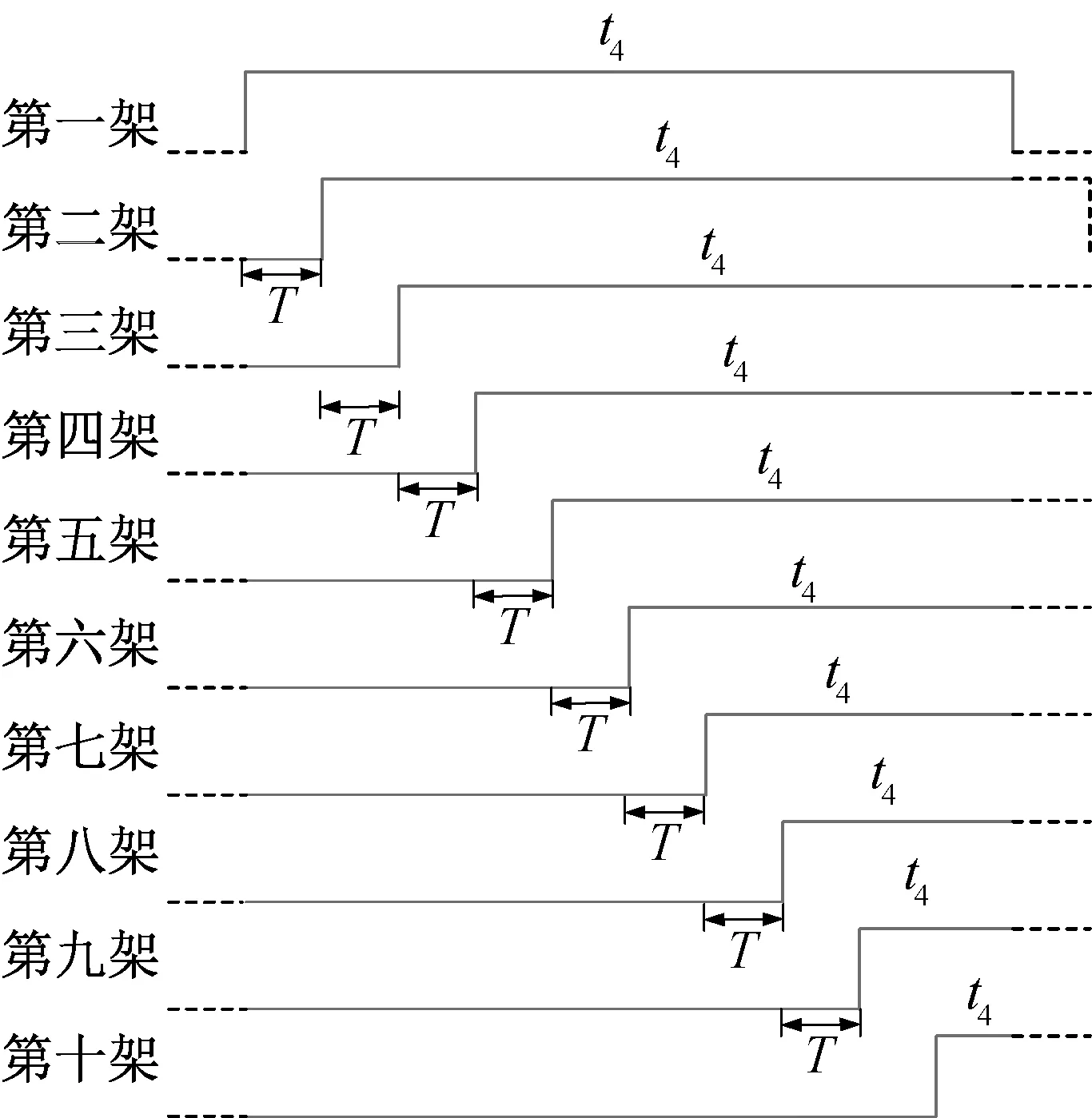
圖5 刮板輸送機彎曲段推移時序圖
3 采煤機滾筒自適應調高技術
以采煤機右滾筒為例,采煤機的姿態信息包括機身傾角和搖臂傾角,因底板狀態發生變化造成機身傾角和高度變化時,需要對搖臂傾角進行調節,使滾筒高度滿足控制要求[7-10].第i-1刀j點采煤機姿態圖見圖6.
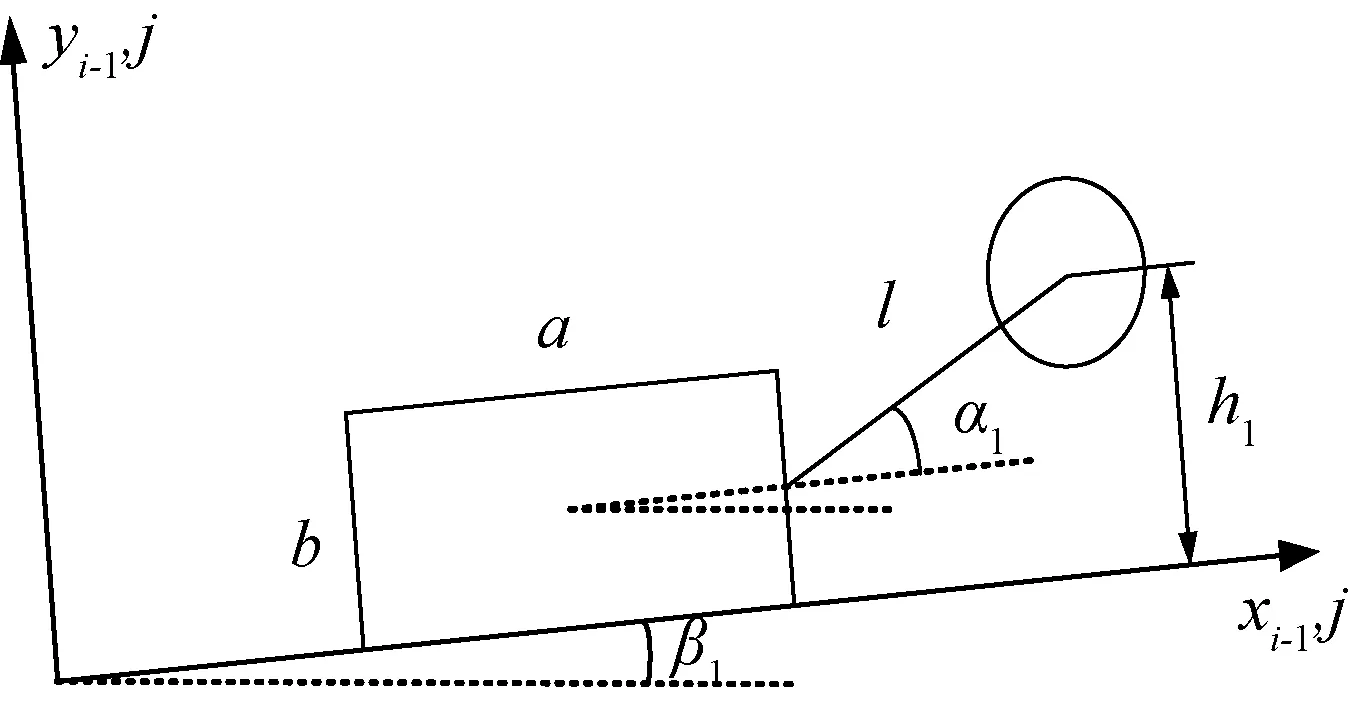
圖6 第i-1刀j點采煤機姿態圖
由圖6可知,當采煤機中心處于第i-1刀j點時,底板傾角為β1,右滾筒搖臂與機身平面的夾角為α1,以第i-1刀的采煤機位姿為基準建立坐標系,則當前采煤機右滾筒高度h1為:
(24)
式中:
a—機身長度,m;
b—機身高度,m;
l—搖臂長度,m.
第i刀j點采煤機姿態圖見圖7.由圖7可知,當采煤機中心處于第i刀j點時,采煤機機身傾角和高度因底板起伏發生變化[11-12],此時底板傾角為β2,右滾筒搖臂與機身之間的夾角為α2,則此時采煤機右滾筒中心距底板高度h2為:
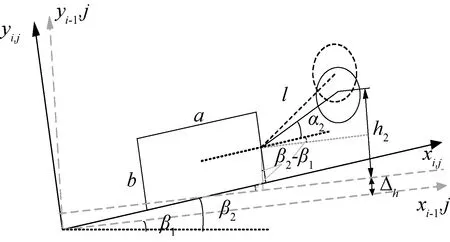
圖7 第i刀j點采煤機姿態圖
式中:
Δβ—第i-1刀和第i刀底板傾角的變化量,Δβ=β2-β1.
理想狀態下,采煤機第i刀和i-1刀在j點出的滾筒高度應相等,即:
h1=h2+Δh
式中:
Δh—第i-1刀和第i刀底板高度的變化量。
則Si,j處右搖臂傾角值α2為:
α2=-Δβ+arcsin
(25)
則相對于第i-1刀右搖臂傾角變化值Δα為:
Δα=α2-α1
(26)
考慮底板高度變化Δh和底板傾角變化Δβ對采煤機記憶截割執行效果的影響,當采煤機處于狀態Si,j時的右滾筒搖臂傾角αi,j應為:
αi,j=-Δβ+arcsin
(27)
執行記憶截割時,采煤機前滾筒實際高度hi.j為:
(28)
當薄煤層采煤機機身傾角變化Δβ或底板高度變化Δh時,采煤機可調整當前前滾筒搖臂傾角αi,j來實現截割高度的自動適應,滾筒高度自動補償方法見圖8.
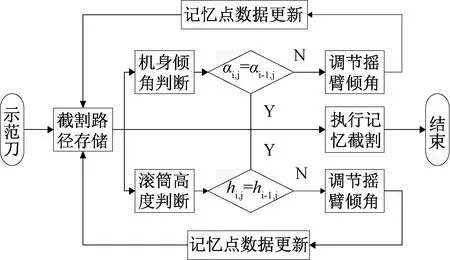
圖8 薄煤層采煤機記憶截割滾筒高度自動補償方法圖
通過滾筒高度自動補償,可使薄煤層采煤機在底板任意起伏的情況下實現搖臂的自適應調整,其執行效果見圖9.
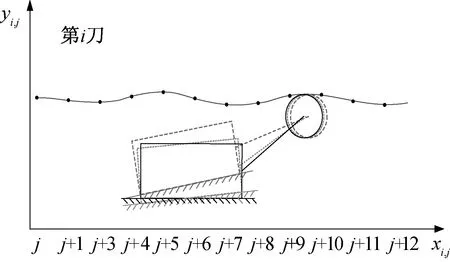
圖9 滾筒高度自動補償效果圖
如圖9所示,采煤機前滾筒的截割高度能夠適應底板高度和傾角的變化,當底板狀態發生變化時,通過薄煤層采煤機滾筒自動補償技術調整搖臂角度實現滾筒高度自動適應,輸出新的理論截割高度[13],并以此為依據,調節采煤機滾筒的實際截割高度,使滾筒實際截割高度與新的理論高度一致。
4 結 語
1)為實現薄煤層自動化控制功能,以自動化控制模型為依據,對薄煤層的自動化控制關鍵技術進行了研究。以液壓支架位姿和采煤機位置信息為基礎,確定了基于液壓支架位置姿態的自動跟機過程“降-移-升”調控技術,并通過理論計算得到了調控后的移架循環時間為原有方法的70%.
2)根據采煤機、液壓支架和刮板輸送機三者間的配合關系,提出刮板輸送機順序控制方法,通過分析中部槽推移頻率得出刮板輸送機推移延時,以實現刮板輸送機位移精確控制。
3)通過薄煤層采煤機滾筒自動補償技術調整搖臂角度實現滾筒高度自動適應,輸出新的理論截割高度,調節采煤機滾筒的實際截割高度,使滾筒實際截割高度與新的理論高度一致,使采煤機搖臂能夠自動適應底板的起伏。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
防爆電機(2022年1期)2022-02-16 01:14:06
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
河北畫報(2021年2期)2021-05-25 02:07:50
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
山西大同大學學報(自然科學版)(2016年2期)2016-12-12 03:19:28
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55
河南科技(2014年18期)2014-02-27 14:14:58