盾構(gòu)機(jī)換刀重載機(jī)械臂結(jié)構(gòu)設(shè)計(jì)與動力學(xué)分析
2020-12-29 09:20:58吳青考李慶黨
機(jī)械設(shè)計(jì)與制造工程 2020年12期
吳青考,李慶黨,2,李 超
(1.青島科技大學(xué)機(jī)電工程學(xué)院,山東 青島 266100)(2.青島科技大學(xué)中德科技學(xué)院,山東 青島 266100)
近年來,在城市地下鐵道的建設(shè)中,盾構(gòu)施工法以其良好的防滲漏水性能、施工安全快速、對周圍環(huán)境影響小等優(yōu)點(diǎn),已經(jīng)成為地鐵施工的主要方法之一,并給實(shí)際工程帶來極大的便利[1]。盾構(gòu)機(jī)作為一種地下掘進(jìn)施工的專用工程機(jī)械,在掘進(jìn)過程中安裝在刀盤上的刀具不可避免地會發(fā)生磨損,而換刀作業(yè)是一項(xiàng)費(fèi)時(shí)費(fèi)力且風(fēng)險(xiǎn)系數(shù)極高的系統(tǒng)工程。目前,盾構(gòu)機(jī)換刀作業(yè)仍以人工換刀方式為主。人工換刀時(shí),土倉內(nèi)封閉、高溫、高壓的惡劣環(huán)境會對施工人員造成極大的影響,并且地下工作空間狹小會增加工作人員逃生難度、增大換刀危險(xiǎn)性,無法保障換刀人員的生命安全[2]。設(shè)計(jì)一套盾構(gòu)機(jī)智能換刀系統(tǒng)是當(dāng)前相關(guān)研究的重點(diǎn),由于盾構(gòu)機(jī)內(nèi)部艙室結(jié)構(gòu)復(fù)雜且空間緊湊,各類自動化換刀方案都對盾構(gòu)機(jī)本體或刀盤進(jìn)行了二次設(shè)計(jì)改造,使得自動換刀系統(tǒng)的研究成本過高[3-4]。而以重載機(jī)械臂作為換刀系統(tǒng)核心裝備的方案能有效避免上述問題,因此對重載機(jī)械臂換刀作業(yè)的研究有重要意義與價(jià)值。
1 重載機(jī)械臂設(shè)計(jì)依據(jù)及性能要求
本文以開挖直徑為6.28 m的土壓平衡式盾構(gòu)機(jī)的17英寸單刃滾刀為換刀作業(yè)對象,其換刀作業(yè)流程主要包括刀盤清洗、刀具磨損檢測、刀具拆卸和刀具搬運(yùn)吊裝等。其中,滾刀的搬運(yùn)作業(yè)是換刀過程中機(jī)械臂的最大載荷作業(yè)狀態(tài)。
根據(jù)對盾構(gòu)機(jī)各艙室內(nèi)部空間尺寸及盾構(gòu)機(jī)刀盤上滾刀布局的分析,結(jié)合換刀作業(yè)時(shí)機(jī)械臂的動作及功能要求,確定機(jī)械臂的性能要求如下:
1)機(jī)械臂本體的最大臂展小于1.5 m,活動跨度2.8 m;
2)機(jī)械臂作業(yè)過程中不能與直徑為0.6 m的盾構(gòu)機(jī)土倉門產(chǎn)生干涉,機(jī)械臂運(yùn)動處于低速平穩(wěn)狀態(tài);
3)機(jī)械臂負(fù)載能力達(dá)250 kg;
4)機(jī)械臂具備快換接頭。
2 重載機(jī)械臂的結(jié)構(gòu)設(shè)計(jì)
根據(jù)設(shè)計(jì)要求,本文設(shè)計(jì)的重載機(jī)械臂主要由帶行走機(jī)構(gòu)的六自由度機(jī)械臂本體和快換接頭兩部分組成,采用液壓驅(qū)動。其中,快換接頭安裝于機(jī)械臂本體末端,實(shí)現(xiàn)幾類拆卸模塊的快速更換;行走機(jī)構(gòu)配合六自由度機(jī)械臂本體,主要用于調(diào)整不同末端工具頭的位姿來完成整個工作空間內(nèi)各類換刀動作。
2.1 快換接頭的設(shè)計(jì)
快換接頭連接功能的實(shí)現(xiàn)主要靠鎖緊機(jī)構(gòu),根據(jù)鎖緊機(jī)構(gòu)動力形式的不同一般將快換接頭分為氣動式、液壓式、電磁式和機(jī)械式等[5]。本文要求快換接頭具有結(jié)構(gòu)緊湊以及簡單可靠的特點(diǎn),因此結(jié)合機(jī)械式和液壓式快換接頭的性能優(yōu)勢,創(chuàng)新設(shè)計(jì)了一種液壓插銷式快換接頭,其結(jié)構(gòu)及與手爪連接時(shí)的裝配示意圖如圖1所示。
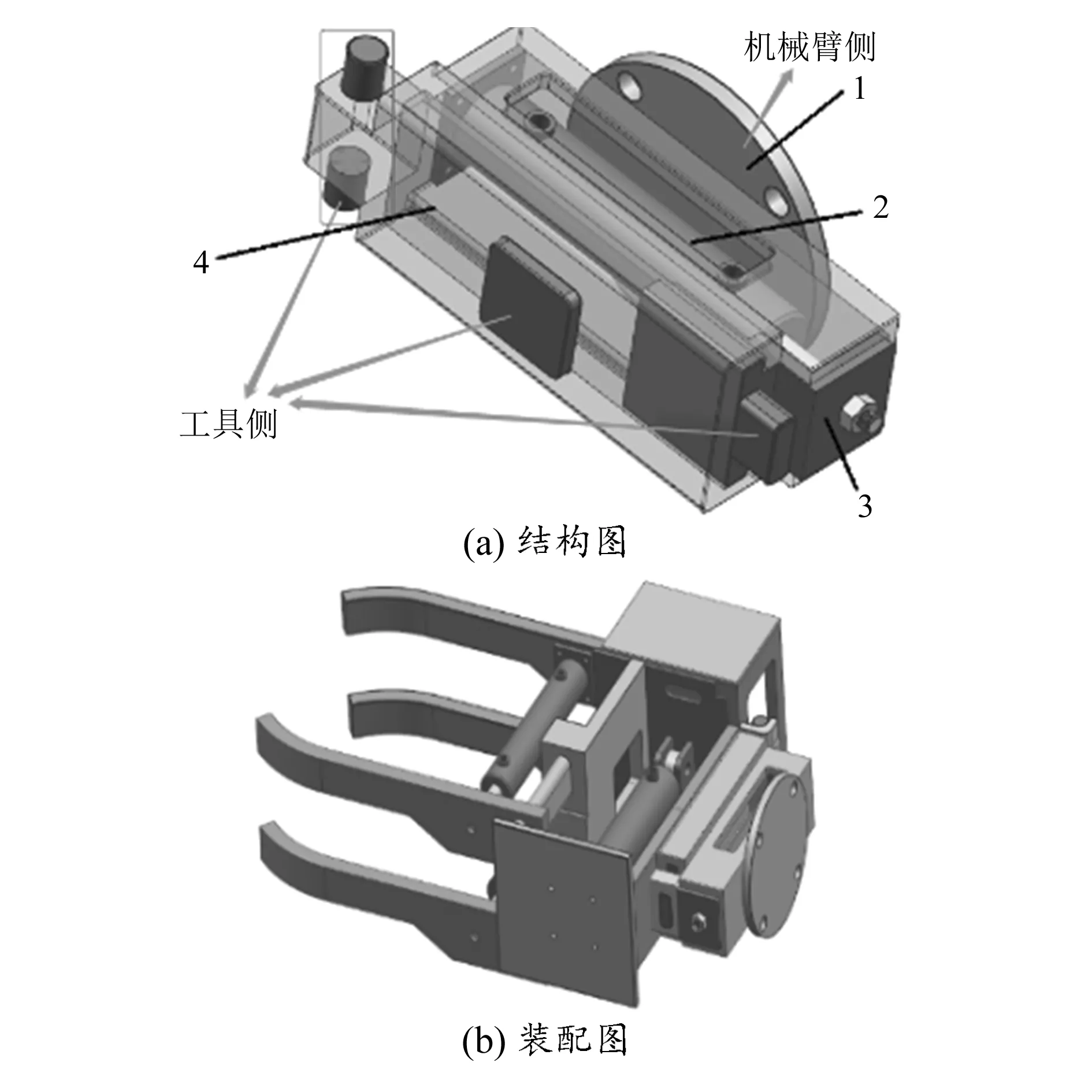
1—安裝法蘭;2—驅(qū)動油缸;3—插銷滑塊;4—?dú)んw
如圖1(a)所示,快換接頭主要包括安裝法蘭、殼體、驅(qū)動油缸和插銷滑塊等結(jié)構(gòu)。快換接頭通過安裝法蘭固定于機(jī)械臂末端關(guān)節(jié),并通過工具側(cè)的結(jié)構(gòu)件與工具頭進(jìn)行對接;具有液控單向閥的雙作用油缸作為動力部件安裝在殼體內(nèi)部,帶動插銷滑塊沿殼體內(nèi)槽伸縮實(shí)現(xiàn)接頭鎖緊。不同工具頭的安裝部位結(jié)構(gòu)都采用與快換接頭工具側(cè)配合的形式實(shí)現(xiàn)快速更換。
2.2 機(jī)械臂主體設(shè)計(jì)
根據(jù)設(shè)計(jì)要求,重載機(jī)械臂本體的關(guān)節(jié)較多、臂展較短且負(fù)載要求很高。因此對機(jī)械臂主要關(guān)節(jié)的動力部件選型時(shí)優(yōu)先考慮螺旋擺動液壓缸,它采用大升角雙螺旋的傳動原理,能在較小空間內(nèi)將液壓能轉(zhuǎn)化為極高的力矩輸出,并且可以通過電液控制達(dá)到較高的轉(zhuǎn)動精度[6]。
在對關(guān)節(jié)進(jìn)行設(shè)計(jì)選型時(shí),將機(jī)械臂以最大臂展?fàn)顟B(tài)裝配,利用UG NX 10.0軟件對已知模型的質(zhì)心位置及質(zhì)量進(jìn)行測量,第i個關(guān)節(jié)的受力示意簡圖如圖2所示。
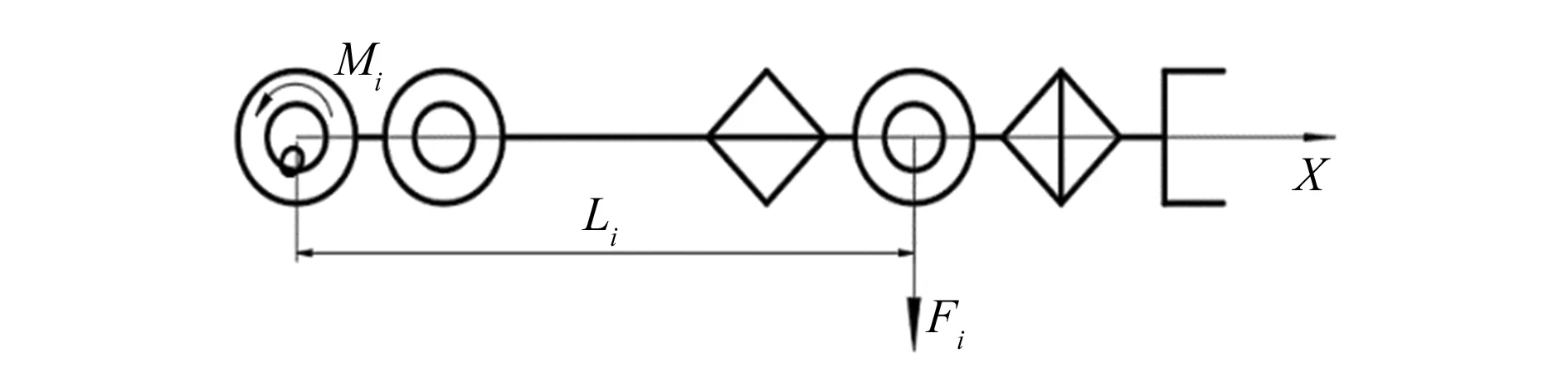
圖2 機(jī)械臂關(guān)節(jié)受力示意圖
第i個關(guān)節(jié)的最大負(fù)載力矩為:
Mi=FiLi=m負(fù)載igLi
(1)
式中:Mi為第i個關(guān)節(jié)的最大負(fù)載力矩,對腰部回轉(zhuǎn)關(guān)節(jié)、行走導(dǎo)軌而言,它代表的是最大傾覆力矩;Fi為第i個關(guān)節(jié)后的所有負(fù)載對關(guān)節(jié)的總作用力;Li為第i個關(guān)節(jié)后的所有負(fù)載對關(guān)節(jié)的力臂;m負(fù)載i為機(jī)械臂在最大臂展?fàn)顟B(tài)下第i個關(guān)節(jié)后的所有負(fù)載的質(zhì)量之和;g為重力加速度。
整個機(jī)械臂本體設(shè)計(jì)過程就是關(guān)節(jié)選型與對應(yīng)臂桿的設(shè)計(jì)交叉進(jìn)行、反復(fù)驗(yàn)證的過程。根據(jù)選型的計(jì)算結(jié)果對所選型的關(guān)節(jié)驅(qū)動器建模,最終在UGNX10.0三維軟件中完成重載機(jī)械臂的三維模型整機(jī)裝配圖,如圖3所示。

1—行走機(jī)構(gòu);2—回轉(zhuǎn)驅(qū)動;3—第一俯仰關(guān)節(jié);4—第二俯仰關(guān)節(jié);5—手爪及滾刀(總負(fù)載);6—快換接頭;7—腕部旋轉(zhuǎn)擺動油缸;8—腕部擺動關(guān)節(jié)
根據(jù)結(jié)構(gòu)設(shè)計(jì)結(jié)果可知,機(jī)械臂本體最大臂展為1.423 m,在導(dǎo)軌和快換接頭的裝配狀態(tài)下最大伸展長度為1.845 m,滿足盾構(gòu)機(jī)艙室空間內(nèi)的安裝作業(yè)要求。
根據(jù)關(guān)節(jié)驅(qū)動選型的結(jié)果可得,機(jī)械臂的末端負(fù)載可達(dá)280 kg,腕部旋轉(zhuǎn)和俯仰關(guān)節(jié)選擇的驅(qū)動器為德國HKS公司的TR20旋轉(zhuǎn)擺動缸,其額定擺動力矩達(dá)1 700 N·m,最大轉(zhuǎn)角為140°,旋轉(zhuǎn)力矩為810 N·m,可以進(jìn)行360°無限制旋轉(zhuǎn);腕部擺動關(guān)節(jié)由雙作用直線液壓缸驅(qū)動,關(guān)節(jié)轉(zhuǎn)角為±15°;第一、第二俯仰關(guān)節(jié)的驅(qū)動器為螺旋擺動液壓缸,其最大轉(zhuǎn)角均為180°,額定力矩分別為7 345 N·m和4 746 N·m;設(shè)計(jì)選型的回轉(zhuǎn)支承及導(dǎo)軌的傾覆力矩均遠(yuǎn)高于最大負(fù)載要求,本文不做驗(yàn)證。
2.3 換刀機(jī)械臂的工作空間驗(yàn)證
本文將換刀機(jī)械臂模型裝配于盾構(gòu)機(jī)的三維模型中,通過UG的干涉檢驗(yàn)功能驗(yàn)證機(jī)械臂在盾構(gòu)機(jī)內(nèi)的作業(yè)能力。
如圖4(a)、(b)所示,選擇盾構(gòu)機(jī)刀盤輻條外緣徑向分布差異最大的兩把滾刀來模擬換刀的極限工位,同時(shí)對機(jī)械臂抓緊滾刀與抽取滾刀(滾刀剛好完全脫離刀盤)的姿態(tài)進(jìn)行無干涉位姿調(diào)節(jié),驗(yàn)證滾刀搬運(yùn)過程中機(jī)械臂是否與盾構(gòu)機(jī)土倉門發(fā)生碰撞。
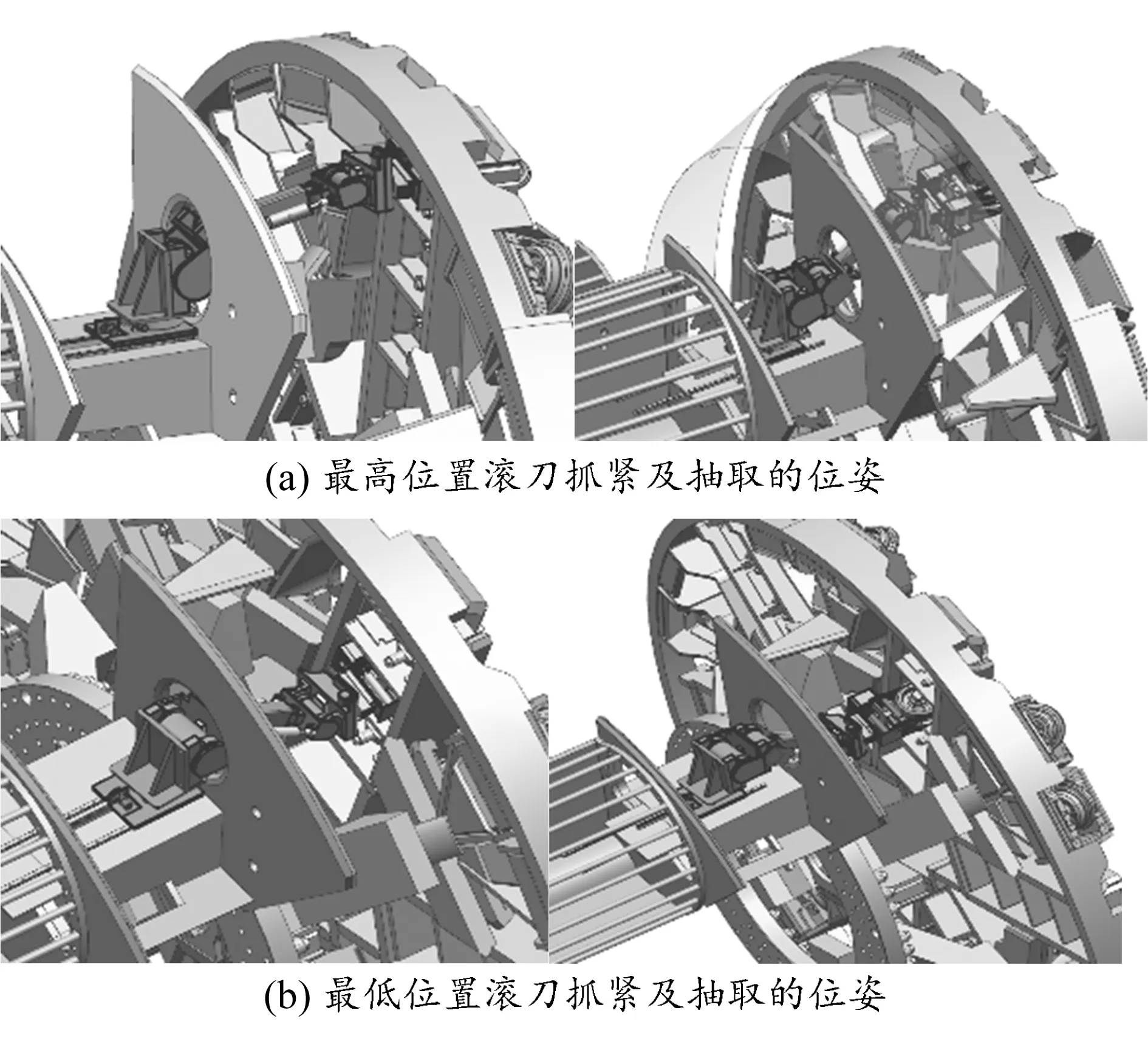
圖4 重載機(jī)械臂作業(yè)的無干涉裝配驗(yàn)證
通過裝配驗(yàn)證后,盾構(gòu)機(jī)刀盤外緣也進(jìn)行了同樣的裝配驗(yàn)證,最終確定本文所設(shè)計(jì)的重載機(jī)械臂可滿足盾構(gòu)機(jī)外緣共18把滾刀的換刀動作要求,包括部分刀盤輻條之間的斜置滾刀。這基本覆蓋了75%最易發(fā)生磨損的滾刀的換刀作業(yè),能有效完成此類盾構(gòu)機(jī)的自動化換刀。
3 機(jī)械臂虛擬樣機(jī)模型的創(chuàng)建
本文設(shè)計(jì)的盾構(gòu)機(jī)換刀重載機(jī)械臂是七自由度的多關(guān)節(jié)機(jī)械臂,由于臂桿多為粗短結(jié)構(gòu),且動作要求低速平穩(wěn),因此在動力學(xué)建模時(shí),將其視為多剛體系統(tǒng)建模[7]。利用ADAMS動力學(xué)仿真軟件建立機(jī)械臂的動力學(xué)模型,模擬機(jī)械臂抓取最高位置滾刀的運(yùn)動過程,分析各關(guān)節(jié)組合運(yùn)動下機(jī)械臂末端的運(yùn)動特性以及運(yùn)動過程中主要運(yùn)動關(guān)節(jié)的受力情況,從而驗(yàn)證重載機(jī)械臂結(jié)構(gòu)設(shè)計(jì)的合理性。
3.1 機(jī)械臂的多剛體動力學(xué)模型
如圖4(a)左圖所示,將UG中重載機(jī)械臂的最高抓取位姿的裝配模型以Parasolid格式導(dǎo)入ADAMS中,設(shè)置好系統(tǒng)的單位制及重力方向,合并多余的非主要運(yùn)動部件,并刪除液壓馬達(dá)和螺釘螺帽等對本體運(yùn)動副沒有主要影響的部件,賦予其他部件真實(shí)材料屬性,得到重載機(jī)械臂的簡化虛擬樣機(jī)模型,如圖5所示。根據(jù)重載機(jī)械臂各部件間的實(shí)際作用關(guān)系定義各部件間的約束關(guān)系,主要部件的約束關(guān)系見表1。
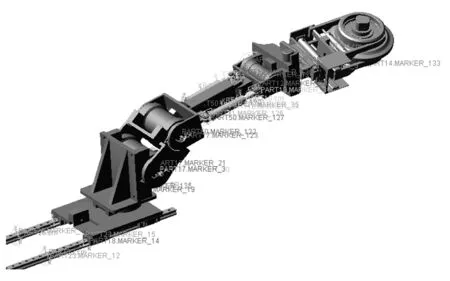
圖5 重載機(jī)械臂的虛擬樣機(jī)模型
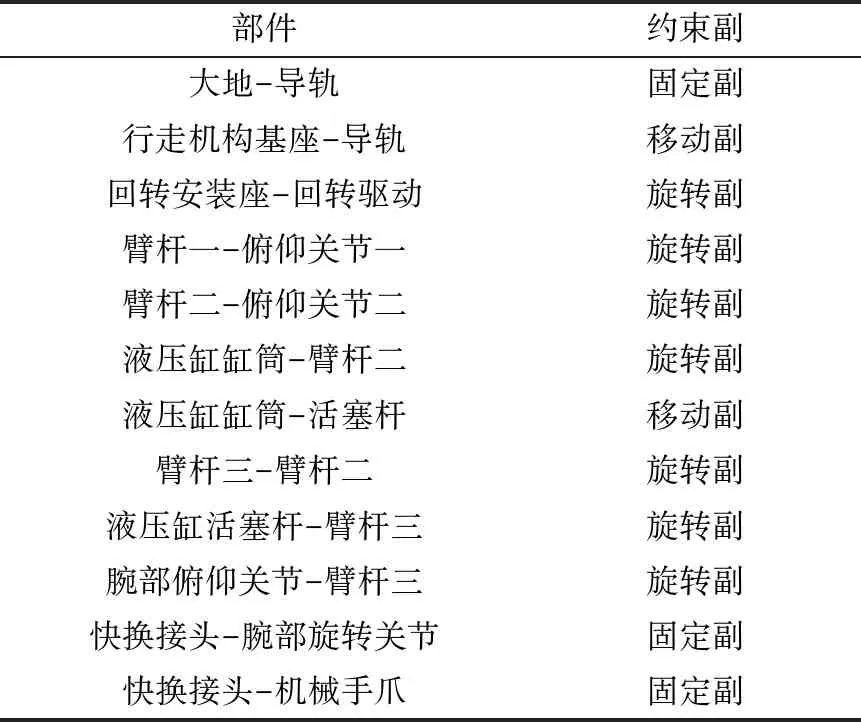
表1 仿真模型的約束關(guān)系
運(yùn)動過程中在主要動作的運(yùn)動副上添加的位移驅(qū)動函數(shù)見表2。
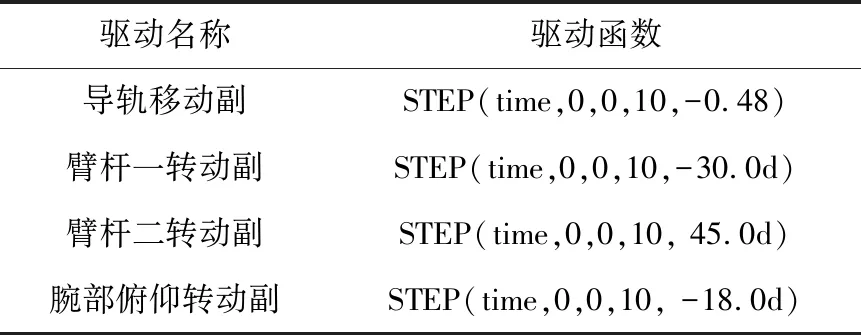
表2 仿真模型的驅(qū)動函數(shù)
3.2 仿真結(jié)果分析
在模型驗(yàn)證正確后,設(shè)置分析類型為運(yùn)動學(xué)和動力學(xué)同時(shí)進(jìn)行分析,設(shè)置仿真時(shí)間為10 s、仿真步長為0.1,求解結(jié)束后,進(jìn)入ADAMS/Post processor中繪制換刀機(jī)械臂的各類特性曲線,如圖6所示。
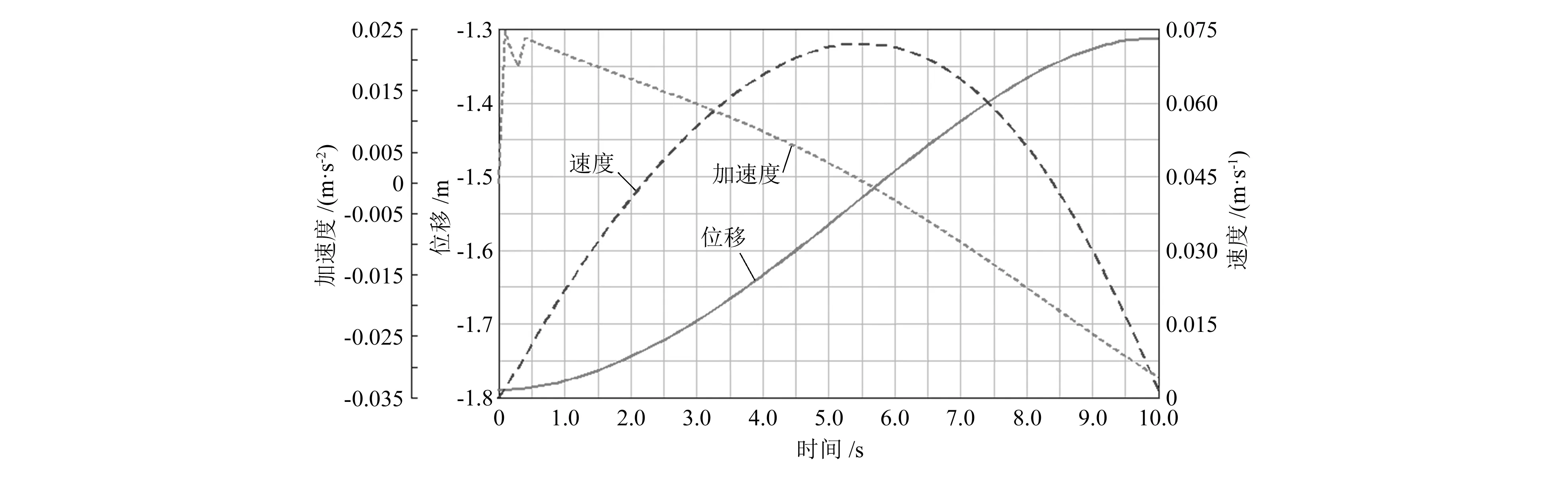
圖6 仿真過程刀具的Z向運(yùn)動曲線
經(jīng)過逆向動力學(xué)求解得到的主要運(yùn)動關(guān)節(jié)的受力變化曲線如圖7所示。
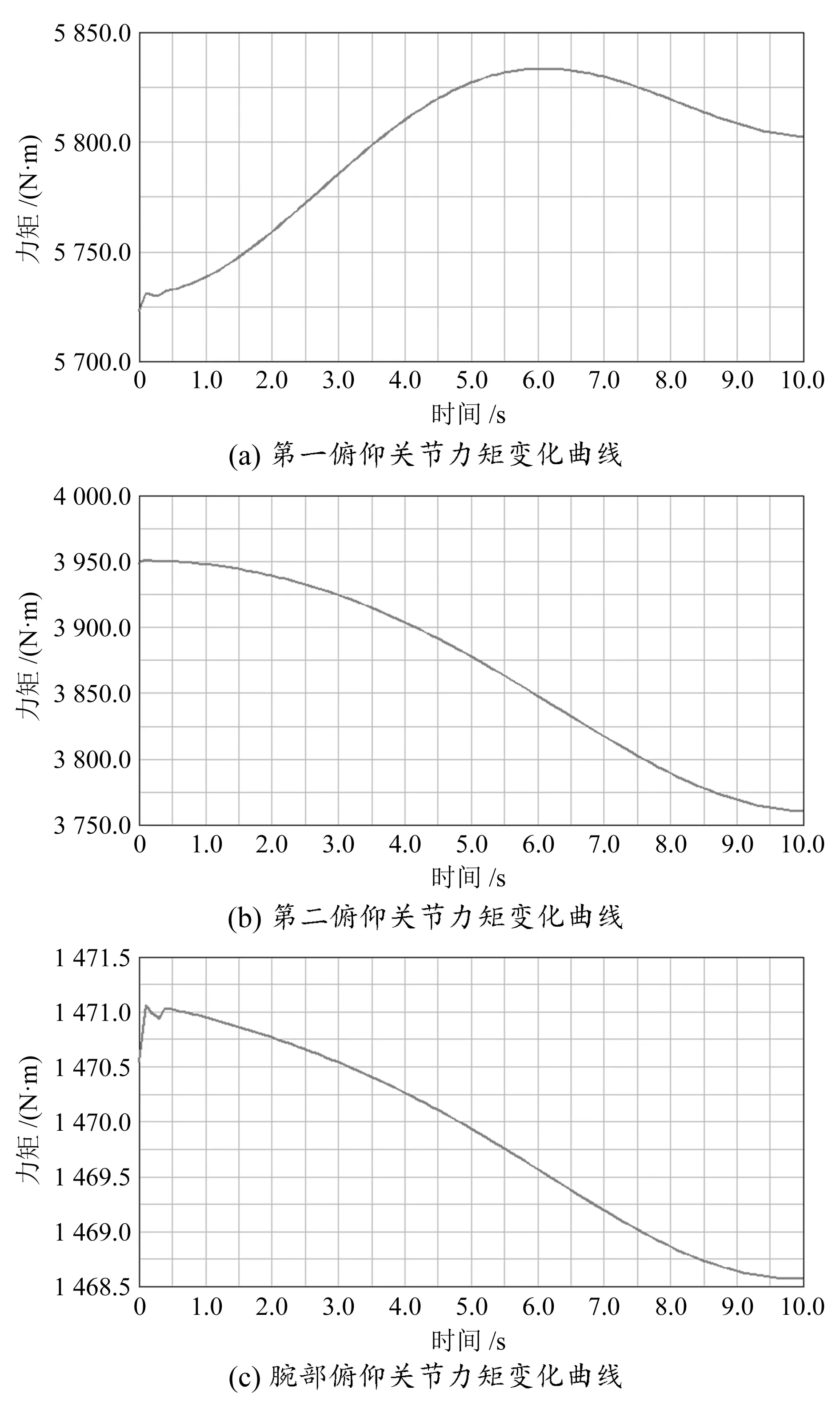
圖7 俯仰關(guān)節(jié)的力矩變化曲線
由圖6可知,在4個主要運(yùn)動關(guān)節(jié)的協(xié)調(diào)動作下,刀具在抽取方向位移約為450 mm,這個行程能夠使?jié)L刀完全脫離刀座,運(yùn)動過程中刀具速度變化平緩,最大平移速度約0.074 m/s,加速度亦無明顯波動,基本符合換刀動作低速平穩(wěn)的運(yùn)動要求。由圖7可知,運(yùn)動過程中三大主要俯仰關(guān)節(jié)的力矩變化平穩(wěn)且改變量較小,這與運(yùn)動過程中機(jī)械臂的位姿變化不明顯有關(guān),尤其是腕部俯仰關(guān)節(jié)的力矩變化微小,也證明了手爪及滾刀在仿真過程中縱向位置變化很小,基本沿直線平移;同時(shí),運(yùn)動過程中各關(guān)節(jié)的最大力矩分別約為5 815 N·m、3 950 N·m和1 471 N·m,都不超過設(shè)計(jì)時(shí)所選的擺動液壓缸的額定工作力矩,且無明顯的沖擊存在,進(jìn)一步證明了關(guān)節(jié)選型的合理性。綜上所述,該盾構(gòu)機(jī)換刀重載機(jī)械臂的結(jié)構(gòu)設(shè)計(jì)是合理的。
4 結(jié)束語
由于條件限制,文章中動力學(xué)仿真所涉及的重載機(jī)械臂、快換接頭及機(jī)械手爪并沒有實(shí)際試驗(yàn)支撐,因而文章更傾向于理論模型方面的研究。盾構(gòu)機(jī)重載機(jī)械臂換刀方案是對已有人工換刀及半自動化換刀方式的技術(shù)革新,重點(diǎn)解決了自動化換刀方案中盾構(gòu)機(jī)本體改造過大的技術(shù)難題,其設(shè)計(jì)結(jié)構(gòu)和仿真數(shù)據(jù)對重載換刀機(jī)械臂的研究有一定的指導(dǎo)作用;但動力學(xué)仿真過程忽略了機(jī)械臂驅(qū)動關(guān)節(jié)螺旋擺動油缸的動力學(xué)特性,需要在進(jìn)一步研究中綜合考慮所有驅(qū)動機(jī)構(gòu)的動力學(xué)特性,從而改進(jìn)系統(tǒng)動力學(xué)模型進(jìn)行仿真或?qū)嵨矧?yàn)證。因而后續(xù)工作將盡可能和相關(guān)企業(yè)聯(lián)合,通過相關(guān)試驗(yàn)進(jìn)一步驗(yàn)證重載機(jī)械臂在盾構(gòu)機(jī)自動化換刀系統(tǒng)中的可行性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
