基于改進(jìn)鯨魚(yú)優(yōu)化算法的陣列單元失效校正
2020-12-24 06:36:14孟憲猛蔡翠翠
探測(cè)與控制學(xué)報(bào) 2020年6期
關(guān)鍵詞:優(yōu)化
孟憲猛,蔡翠翠
(1.安徽博微長(zhǎng)安電子有限公司,安徽 六安 237012;2.目標(biāo)探測(cè)與特征提取安徽省重點(diǎn)實(shí)驗(yàn)室,安徽 六安 237012;3.皖西學(xué)院 電子與信息工程學(xué)院,安徽 六安 237010)
0 引言
陣列天線是由若干天線單元按照一定方式排列和激勵(lì)形成的電磁波輻射源,具有高增益、多波束、低副瓣、快速掃描等特點(diǎn),被廣泛應(yīng)用于現(xiàn)代雷達(dá)系統(tǒng)[1]。隨著雷達(dá)系統(tǒng)的智能化、多功能化,陣列天線結(jié)構(gòu)日益復(fù)雜,天線陣元數(shù)目可達(dá)數(shù)千個(gè),增加陣元失效的概率。由于器件老化、受外界物理?yè)p壞等因素,會(huì)導(dǎo)致天線陣列單元失效,造成天線副瓣電平升高、波束變寬和天線增益下降等[2-4],影響雷達(dá)系統(tǒng)的探測(cè)性能。同時(shí),電磁脈沖、高能微波武器的強(qiáng)電磁脈沖入侵造成陣列天線陣元損傷,影響雷達(dá)系統(tǒng)的性能[5]。失效陣元維修更換的時(shí)間較長(zhǎng),特別是戰(zhàn)場(chǎng)環(huán)境下,無(wú)法進(jìn)行及時(shí)修復(fù)。因此,通過(guò)對(duì)陣列天線失效陣元的校正,優(yōu)化配置剩余陣元資源,最大程度保證陣列天線性能,就顯得尤為重要。
目前對(duì)于陣列天線失效校正的研究,主要通過(guò)智能優(yōu)化算法進(jìn)行剩余陣元優(yōu)化,文獻(xiàn)[6—7]利用遺傳算法但算法在優(yōu)化過(guò)程中易陷入局部最優(yōu)。文獻(xiàn)[8]利用粒子群算法對(duì)失效陣列天線進(jìn)行優(yōu)化,使失效陣元后的方向圖得到校正,但算法在求解后期的收斂性能趨于飽和,易出現(xiàn)早熟現(xiàn)象。文獻(xiàn)[9]利用布谷鳥(niǎo)優(yōu)化算法對(duì)陣元失效進(jìn)行校正,但易陷入局部最優(yōu),收斂精度低。文獻(xiàn)[10]利用差分搜索算法對(duì)失效陣元進(jìn)行校正,最大程度保證陣列天線的性能,但存在收斂精度低等問(wèn)題。本文針對(duì)此問(wèn)題,提出一種改進(jìn)鯨魚(yú)優(yōu)化算法,在鯨魚(yú)優(yōu)化算法基礎(chǔ)上,采用自適應(yīng)權(quán)重加速算法收斂,結(jié)合差分進(jìn)化策略,豐富種群個(gè)體信息,增強(qiáng)優(yōu)化算法的全局收斂性,通過(guò)對(duì)優(yōu)化剩余正常陣元,有效抑制陣列的副瓣電平,降低失效陣元對(duì)陣列天線性能的影響。
1 陣列天線模型
直線形陣列天線由于結(jié)構(gòu)簡(jiǎn)單且易于實(shí)現(xiàn),得到廣泛應(yīng)用。本文以直線陣列天線為例,研究陣元失效校正問(wèn)題。對(duì)于N個(gè)單元等距均勻直線陣,假定每個(gè)陣元均各向同性,則陣列天線的歸一化陣因子可以表示為[1]:

(1)
式(1)中,In為第n個(gè)陣元的激勵(lì)電流;k為波數(shù),k=2π/λ,λ為空間自由波長(zhǎng);dn、φn分別為第n個(gè)陣元的位置和相位;d為均勻線陣的陣元間距;u=cosθ,θ為射線方向與陣列軸線之間的夾角。
通過(guò)對(duì)陣列天線中剩余正常陣元激勵(lì)的重配置,可以降低失效陣元影響,盡可能恢復(fù)陣列天線的性能,實(shí)現(xiàn)陣列天線的失效校正。為有效評(píng)價(jià)智能優(yōu)化算法對(duì)陣元失效校正效果,結(jié)合天線最大副瓣電平和波束寬度,構(gòu)建適應(yīng)度函數(shù)為[5,11]:
Fitness=fSLL(θ)+k·fBW
(2)
fSLL(θ)=max[F(θ)]
(3)
fBW=max(0,|Wd-W|-0.05)
(4)
式(2)—式(4)中,k為權(quán)重系數(shù);Wd、W為期望和計(jì)算的波束寬度。
2 改進(jìn)鯨魚(yú)優(yōu)化算法
2.1 標(biāo)準(zhǔn)鯨魚(yú)優(yōu)化算法
鯨魚(yú)優(yōu)化算法是通過(guò)模擬座頭鯨的捕食獵物行為而提出的一種新型元啟發(fā)式算法,具有結(jié)構(gòu)簡(jiǎn)單、調(diào)節(jié)參數(shù)少、局部尋優(yōu)能力強(qiáng)等特點(diǎn),主要包括獵物包圍、氣泡網(wǎng)攻擊、搜索獵物三個(gè)階段[12-13]。
1) 獵物包圍
座頭鯨根據(jù)識(shí)別獵物所在位置實(shí)現(xiàn)獵物包圍,然而由于獵物的位置無(wú)法提前獲知,所以在鯨魚(yú)優(yōu)化算法中,假設(shè)當(dāng)前種群最優(yōu)個(gè)體位置為最優(yōu)目標(biāo)點(diǎn)位置,其他個(gè)體均向最優(yōu)位置調(diào)整。數(shù)學(xué)模型表示為:
X(t+1)=X*(t)-A·D
(5)
D=|CX*(t)-X(t)|
(6)
式(5)、式(6)中,t是當(dāng)前迭代次數(shù),X*(t)是當(dāng)前最優(yōu)個(gè)體位置向量,X(t)是當(dāng)前個(gè)體的位置向量,A和C是系數(shù)變量,計(jì)算公式如下:
A=2ar1-a
(7)
C=2·r2
(8)
a=2(1-t/Tmax)
(9)
式(7)—式(9)中,r1和r2為[0,1]之間的隨機(jī)數(shù);a為控制參數(shù),呈線性遞減;Tmax為最大迭代次數(shù)。
2) 氣泡網(wǎng)攻擊
座頭鯨吐氣泡攻擊獵物,主要分為收縮包圍和螺旋位置更新,數(shù)學(xué)模型可以表示為:
① 收縮包圍:通過(guò)系數(shù)變量A的控制參數(shù)a,實(shí)現(xiàn)對(duì)獵物的包圍收縮。
② 螺旋位置更新:鯨魚(yú)在包圍獵物后,以螺旋式運(yùn)動(dòng)捕獲獵物,其數(shù)學(xué)模型為:
X(t+1)=X*(t)+DP·eblcos(2πl(wèi))
(10)
式(10)中,DP=|X*(t)-X(t)|表示鯨魚(yú)與獵物的距離,b表示對(duì)數(shù)螺旋形狀常數(shù),l是[-1,1]之間的隨機(jī)數(shù)。
座頭鯨在氣泡網(wǎng)攻擊獵物時(shí),收縮包圍和螺旋位置更新兩種方式是同步的。在數(shù)學(xué)模型中,采用相同概率更新位置信息,可以表示為:
(11)
式(11)中,p為[0, 1]上的隨機(jī)數(shù)。
3) 搜索獵物
座頭鯨在氣泡網(wǎng)攻擊獵物時(shí),還會(huì)隨機(jī)搜索獵物。以變量系數(shù)A為基礎(chǔ),當(dāng)|A|值大于1時(shí),隨機(jī)選取鯨魚(yú)個(gè)體位置,調(diào)整尋優(yōu)個(gè)體的位置信息,以增強(qiáng)算法的全局搜索能力,其數(shù)學(xué)模型表示如下:
X(t+1)=Xrand-A·D
(12)
D=|C·Xrand-X(t)|
(13)
式(12)、式(13)中,Xrand表示當(dāng)前群體中隨機(jī)選擇的一個(gè)位置向量,X(t)為個(gè)體所在的位置向量。
2.2 改進(jìn)的鯨魚(yú)優(yōu)化算法
標(biāo)準(zhǔn)鯨魚(yú)優(yōu)化算法主要通過(guò)調(diào)節(jié)變量系數(shù)A、C實(shí)現(xiàn)局部和全局尋優(yōu),而在優(yōu)化復(fù)雜問(wèn)題時(shí),系數(shù)的調(diào)節(jié)依賴隨機(jī)性,導(dǎo)致收斂速度慢、收斂精度低[14-15]。為解決這一問(wèn)題,提出一種改進(jìn)鯨魚(yú)優(yōu)化算法,該算法在標(biāo)準(zhǔn)鯨魚(yú)優(yōu)化算法基礎(chǔ)上,引入自適應(yīng)權(quán)重,提升局部尋優(yōu)能力;同時(shí)結(jié)合差分進(jìn)化策略,通過(guò)最優(yōu)解的交叉、變異和選擇,提升全局尋優(yōu)能力。
2.2.1自適應(yīng)權(quán)重
權(quán)重因子可有效平衡算法的局部尋優(yōu)能力和全局能力[16]。對(duì)鯨魚(yú)優(yōu)化算法引入自適應(yīng)權(quán)重,權(quán)值計(jì)算公式如下:
(14)
式(14)中,t為當(dāng)前迭代次數(shù),Tmax為最大的迭代次數(shù)。
鯨魚(yú)優(yōu)化算法增加自適應(yīng)權(quán)重后,所包含獵物包圍、氣泡網(wǎng)攻擊和搜索獵物的數(shù)學(xué)模型更新為:
X(t+1)=X*(t)-ω·A·D
(15)
X(t+1)=X*(t)+ω·DP·eblcos (2πl(wèi))
(16)
X(t+1)=Xrand-ω·A·D
(17)
2.2.2差分進(jìn)化策略
差分進(jìn)化是一種模擬生物進(jìn)化算法,主要有變異、交叉和選擇等操作[17-18]。具體過(guò)程為:在每次迭代結(jié)束后,對(duì)當(dāng)前最優(yōu)位置向量進(jìn)行變異和交叉,得到新的位置向量,并進(jìn)行適應(yīng)度計(jì)算,如果求得新的適應(yīng)度值小于最優(yōu)位置向量,則用替換當(dāng)前最優(yōu)位置,否則繼續(xù)下一次迭代。
1) 變異操作
變異操作是通過(guò)選取當(dāng)前種群中較優(yōu)的鯨魚(yú)個(gè)體進(jìn)行變異,擴(kuò)大搜索范圍,避免算法陷入局部最優(yōu),具體如下式:
Vi(t+1)=Xi(t)+F·(Xr1(t)-Xr2(t))
(18)
式(18)中,Vi(t+1)表示變異后的鯨魚(yú)個(gè)體位置;F表示縮放比例因子;Xr1(t)-Xr2(t)表示當(dāng)代鯨魚(yú)個(gè)體位置的差異向量。
2) 交叉操作
交叉操作是通過(guò)產(chǎn)生一個(gè)隨機(jī)數(shù),并與比較交叉因子比較,判斷是否產(chǎn)生新個(gè)體,具體如下式:
(19)
式(19)中,Ui(t+1)表示交叉后的鯨魚(yú)個(gè)體位置,C表示交叉因子。
3) 選擇操作
選擇操作是將交叉后的個(gè)體位置與原始個(gè)體位置進(jìn)行比較,根據(jù)適應(yīng)度值大小決定是否采用新個(gè)體,具體如下:
(20)
2.2.3算法的實(shí)現(xiàn)步驟
改進(jìn)的鯨魚(yú)優(yōu)化算法通過(guò)引入自適應(yīng)權(quán)重和差分進(jìn)化策略,有效提升局部尋優(yōu)和全局尋優(yōu)能力,具體步驟如下:
1) 初始化算法參數(shù),設(shè)定種群個(gè)數(shù)N,最大迭代次數(shù)Tmax,對(duì)數(shù)螺旋形狀常數(shù)b,隨機(jī)數(shù)l,縮放因子F,交叉因子C等參數(shù);
2) 在解空間內(nèi)隨機(jī)產(chǎn)生種群,計(jì)算適應(yīng)度函數(shù)值,記錄種群中適應(yīng)度函數(shù)值最優(yōu)的個(gè)體位置為最優(yōu)位置;
3) 當(dāng)p<0.5時(shí),若|A|<1,通過(guò)式(14)更新鯨魚(yú)位置信息;若|A|≥1,通過(guò)式(16)更新鯨魚(yú)位置信息,計(jì)算個(gè)體的適應(yīng)度函數(shù)值;
4) 當(dāng)p≥0.5時(shí),通過(guò)式(15)更新鯨魚(yú)位置信息,計(jì)算個(gè)體的適應(yīng)度函數(shù)值;
5) 利用式(17)對(duì)最優(yōu)位置再進(jìn)行差分進(jìn)化,計(jì)算個(gè)體的適應(yīng)度函數(shù)值;
6) 根據(jù)差分進(jìn)化前后的適應(yīng)度函數(shù)值,判斷是否更新最優(yōu)位置,若經(jīng)過(guò)差分進(jìn)化的個(gè)體適應(yīng)函數(shù)值小于更新前個(gè)體適應(yīng)函數(shù)值,則保留進(jìn)化后的個(gè)體位置和適應(yīng)函數(shù)值,否則舍棄進(jìn)化后個(gè)體位置;
7) 判斷算法是否滿足最大迭代次數(shù),若滿足條件,輸出最優(yōu)值和最優(yōu)個(gè)體位置,否則返回步驟2)繼續(xù)搜索。
3 仿真實(shí)例
為驗(yàn)證所提出算法的有效性,通過(guò)實(shí)例進(jìn)行仿真驗(yàn)證。
仿真實(shí)例1:對(duì)于線性陣列天線,單元數(shù)N=32,單元間距d=λ/2,天線波長(zhǎng)λ=1,采用等幅度饋電,激勵(lì)電流的相位為0,權(quán)重系數(shù)k為10,假定陣元3、11、18、24失效,陣元失效前后的天線方向圖如圖1所示,從圖1中可以看出,陣元失效導(dǎo)致天線副瓣電平升高,方向圖急劇惡化。
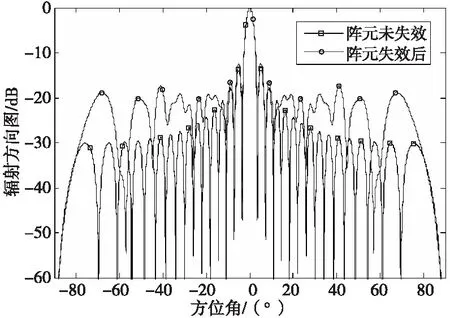
圖1 陣元失效前后的方向圖Fig.1 The antenna pattern before and after array element failure
采用改鯨魚(yú)優(yōu)化算法優(yōu)化陣元激勵(lì)幅度,對(duì)陣元失效后的天線方向圖進(jìn)行校正,并和標(biāo)準(zhǔn)鯨魚(yú)優(yōu)化算法、采用線性優(yōu)化算法權(quán)值更新的粒子群優(yōu)化算法優(yōu)化結(jié)果進(jìn)行比較。算法的初始參數(shù)設(shè)置為:種群個(gè)數(shù)為30,最大迭代次數(shù)為500次,對(duì)數(shù)螺旋形狀常數(shù)b為1,縮放因子F為0.8,交叉因子C為0.9。
經(jīng)過(guò)仿真,得到優(yōu)化算法收斂曲線和優(yōu)化后的陣列天線方向圖如圖2和圖3所示,從圖2中可以看出,改進(jìn)的鯨魚(yú)優(yōu)化算法迭代進(jìn)化優(yōu)于標(biāo)準(zhǔn)鯨魚(yú)算法;從圖3中可以看出,陣元失效后天線最大副瓣電平為-12.46 dB,經(jīng)過(guò)改進(jìn)鯨魚(yú)優(yōu)化算法、標(biāo)準(zhǔn)鯨魚(yú)優(yōu)化算法和采用線性權(quán)值更新的粒子群優(yōu)化算法校正后的方向圖最大副瓣電平分別為-18.08、-17.34和-17.58 dB。
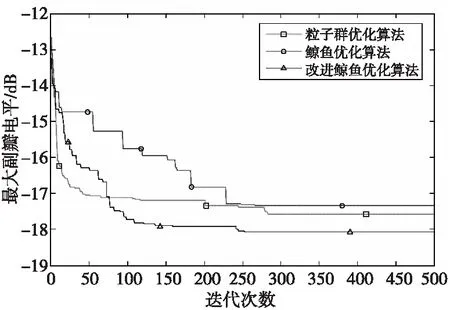
圖2 算法的收斂曲線Fig.2 Convergence curve of the algorithm
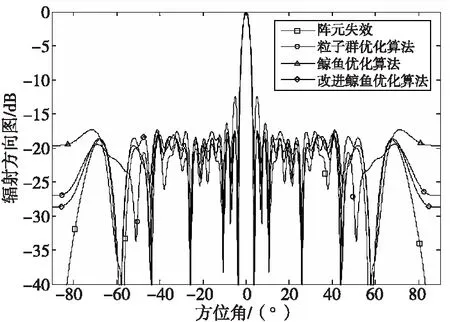
圖3 優(yōu)化后的天線方向圖Fig.3 The optimized antenna pattern
仿真實(shí)例2:對(duì)于線性陣列天線,單元數(shù)N=32,單元間距d=λ/2,天線波長(zhǎng)λ=1,采用副瓣為-30 dB的切比雪夫加權(quán)饋電,激勵(lì)電流的相位為0,假定陣元3、9、15失效,陣元失效前后的天線方向圖如圖4所示。從圖中可以看出,陣元失效導(dǎo)致天線副瓣電平升高,方向圖急劇惡化。
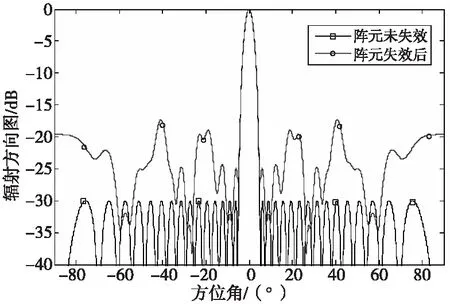
圖4 陣元失效前后的方向圖Fig.4 The antenna pattern before and after array element failure
通過(guò)優(yōu)化陣元激勵(lì)幅度實(shí)現(xiàn)方向圖校正,優(yōu)化算法的參數(shù)設(shè)置同實(shí)例1。
經(jīng)過(guò)仿真,得到算法收斂曲線和陣列天線方向圖如圖5和圖6所示,從圖5中可以看出,改進(jìn)的鯨魚(yú)優(yōu)化算法迭代進(jìn)化優(yōu)于標(biāo)準(zhǔn)鯨魚(yú)算法;從圖6中可以看出,陣元失效后天線最大副瓣電平為-17.34 dB,經(jīng)過(guò)改進(jìn)鯨魚(yú)優(yōu)化算法、標(biāo)準(zhǔn)鯨魚(yú)優(yōu)化算法和采用線性權(quán)值更新的粒子群優(yōu)化算法校正后的方向圖最大副瓣電平分別為-21.58、-19.32和-20.45 dB。
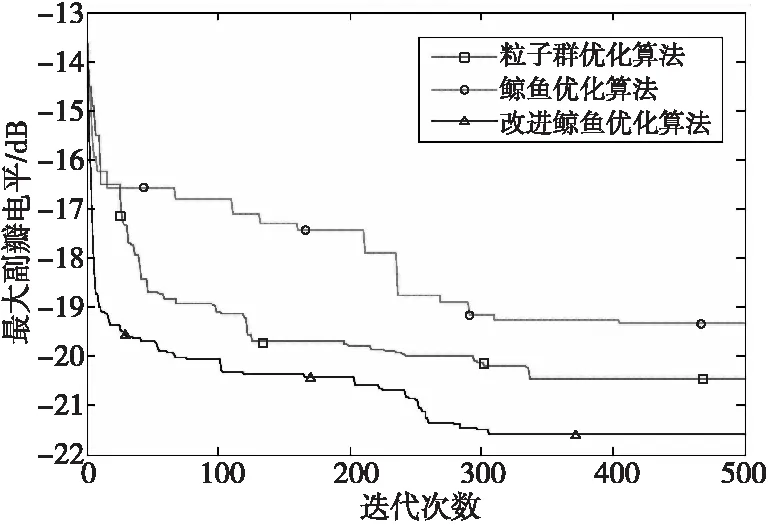
圖5 算法的收斂曲線Fig.5 Convergence curve of the algorithm
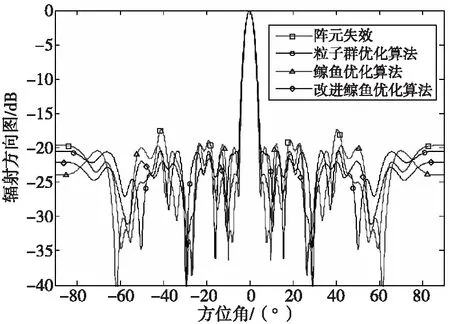
圖6 優(yōu)化后的天線方向圖Fig.6 The optimized antenna pattern
由此可見(jiàn),改進(jìn)鯨魚(yú)優(yōu)化算法的收斂速度和收斂精度優(yōu)于標(biāo)準(zhǔn)鯨魚(yú)優(yōu)化算法和采用線性權(quán)值更新的粒子群優(yōu)化算法。
4 結(jié)論
本文提出了一種改進(jìn)鯨魚(yú)優(yōu)化算法,用于陣列天線陣元失效校正。該算法在鯨魚(yú)優(yōu)化算法的基礎(chǔ)上,引入自適應(yīng)權(quán)重,提升局部尋優(yōu)能力;同時(shí)結(jié)合差分進(jìn)化策略,通過(guò)最優(yōu)解交叉、變異和選擇,提升全局尋優(yōu)能力。仿真實(shí)例表明,改進(jìn)鯨魚(yú)優(yōu)化算法能夠有效抑制陣列的副瓣電平,降低失效陣元對(duì)天線性能的影響。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45